基于旋翼无人机的磁干扰补偿技术
2017-01-20张龙伟刘首善张谨陈恩
张龙伟刘首善张谨陈恩
(1.第七一五研究所,杭州,310023;2.91046部队,山东莱阳,265200)
基于旋翼无人机的磁干扰补偿技术
张龙伟1刘首善2张谨1陈恩1
(1.第七一五研究所,杭州,310023;2.91046部队,山东莱阳,265200)
为解决旋翼无人机对高灵敏度氦光泵磁力仪的磁干扰补偿问题,设计了一套简易实用的磁补偿器。该补偿器对旋翼机在特定方向上的特定机动动作引起的磁异常进行手动补偿。通过补偿前后数据对比分析,验证了该方法可以很好的消除旋翼机转向和摇摆时对设备数据的影响,保证了旋翼机在航向发生变化或侧风作业时的数据准确性。
旋翼无人机;氦光泵磁力仪;磁补偿器
航磁测量系统不仅在军事、宇宙磁测上得到应用,在航空地球物理勘探、海洋磁测、海洋工程勘测设计中也得到普遍应用。新近开发的基于多旋翼无人机航磁测量系统在水下考古中受到重视[1]。由于多旋翼无人机稳定性好,易于操控,相对于小型固定翼、直升机系列更为可靠。数字式小型化氦光泵磁探仪,集成数字采集系统、GPS、磁补偿器、高能锂电池等总重量不超8 kg,完全满足安装要求。航磁测系统构成如图1所示。光泵探头安装在飞机下部1.2 m处,尽可能降低飞机磁干扰的影响。

图1 基于多旋翼无人机航磁测量系统
1 飞机磁干扰源分析
Tolles-Lawson方程分析了机载磁探仪的磁干扰和机动相关联的噪声问题[2]。飞机上所有磁干扰可等效为一个假想磁源M,这个磁源将影响磁力仪工作性能。Tolles-Lawson方程指出上述磁源是由三种不同的磁干扰源组成。第一种是飞机各种铁磁性物质的永久磁化,例如电机中的永磁体等。第二种磁干扰是飞机上某些铁磁性物质被地磁场感应产生的磁场,如操纵钢索类。这种感应磁场显然与永久磁场不同,不随飞机机动而转动,但它的极性和大小取决于地磁场方向和大小。第三种磁干扰源是由涡流磁场产生的,如大面积机翼浆体。飞机在地磁场中运动时,这些导电体将产生涡流电流,这一电流与地磁场穿过这些物件的时间变化率成正比。理论上还可能找出其他一些磁干扰,如某些设备的供电流突变。上述三种磁干扰源将是磁补偿技术的重点。
2 磁补偿器设计
经验指出:飞机磁干扰越简单越容易补偿。因此“磁净化”技术很重要。就本机氦光泵磁探仪的光泵探头安装方式而言,采取如下措施:所有结构件,包括螺钉、螺母均采用无磁性材料;所有供电电源线均重新布置,做无磁场外泄处理;主要干扰源无刷电机做屏蔽处理。由于多旋翼无人机无大面积金属构件和操纵钢索类物体,因此,感应场和涡流场影响可以不考虑。通过上述“磁净化”处理,磁干扰将主要由永久场组成。这为小型无人机磁补偿创造了较佳条件。

图2 基本几何关系和机动角定义
当飞机平飞时:

当飞机做摇摆机动时:

所有设备在飞机上安装确定后,飞机上的永久磁场源就已确定,它不会随飞机机动而改变。参见图2,在原点O,即安装光泵探头的位置,由永久磁场产生的总干扰场恒定的,可以用飞机轴平行的分量T、L、V来表征。所以在光泵探头输入端永久磁场可以表示为:

式中,T、L、V分量是受飞机轴机动影响的,而探头处的干扰场的数值也是变化的。由于光泵探头检测的是地磁总场,因此有效的永久磁场Hpq为:


上式就是在原点O处,飞机永久磁场源的数学表达式。据此,一套简易的针对多旋翼无人机的磁补偿器原理框图如图3所示。
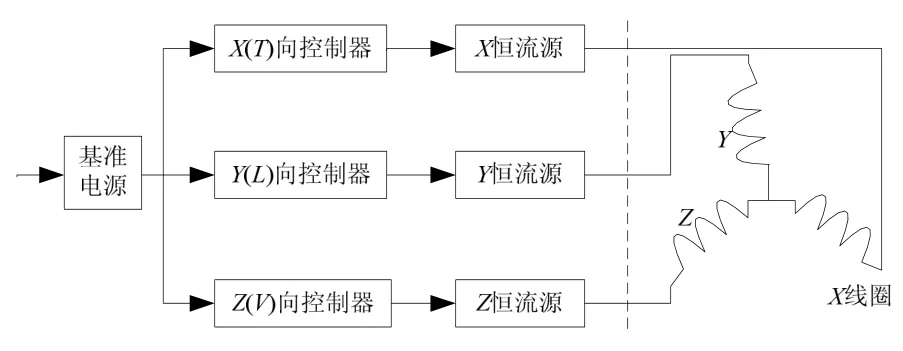
图3 磁补偿器原理框图
3 补偿试验及结果
旋翼机姿态变化时,磁场干扰可以分解到不同分量上,可以控制旋翼机姿态变化使其他分量不变,只将干扰投影到某一分量上,然后选择一系列机动动作结合磁补偿器予以补偿,直到所有分量的干扰量被全部补偿为止。补偿试验分两阶段进行:先进行平面八方位方向差校正,再做垂直方向机动补偿。由式(1)~(3)可推得:
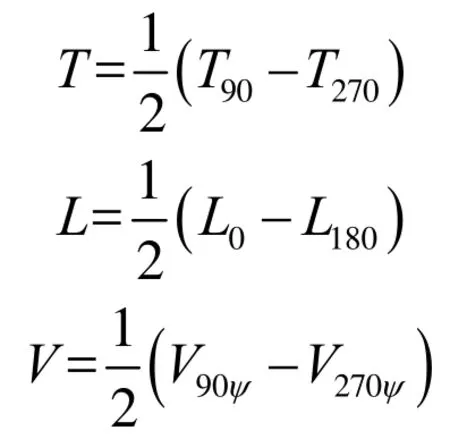
其中,T90指x分量在东航向光泵磁探仪测得的磁场值;L0指y分量在北航向光泵磁探仪测得的磁场值;V90ψ指z分量在东航向做摇摆机动时光泵磁探仪测得磁场值,其余类推。使用补偿架检验补偿效果,补偿架采用无磁材料制作,底座为全木制结构,转盘采用环氧板雕刻而成。补偿架如图4所示。

图4 补偿架实物图
使用高精度磁力仪选择补偿试验所需场地应满足磁梯度小于3 nT/m,选取光泵探头正下方为中心O点,使用罗盘标识出0°(360°)、45°、90°、135°、180°、225°、270°、315°。保持旋翼机垂直高度不变,依次转动补偿架转盘在标识各点并记录磁场值,将记录数据统计绘图并求出差值,利用T和L向控制器补偿水平八方位磁差。平面八方位补偿前后效果对比如图5所示。由图可知,补偿前八方位偏差为50.9 nT,使用T、L项补偿后,平面八方位偏差在2 nT左右。
垂直方向机动补偿,保持旋翼机水平方向不变,依次转动补偿架转盘至90°、270°,进行摇摆机动,将记录数据统计绘图并求出差值,利用V向控制器补偿垂直方向磁差。摇摆补偿前后效果对比如图6所示。由图可知,补偿前摇摆小幅度机动偏差为7.6 nT,使用V项补偿后,摇摆小幅度机动偏差在1.5 nT左右。