2 m SiC主镜Kinematic侧支撑方法设计与优化
2017-01-17张景旭王富国刘祥意
刘 博,张景旭,王富国,刘祥意
2 m SiC主镜Kinematic侧支撑方法设计与优化
刘 博1,2,张景旭1,王富国1,刘祥意1
( 1. 中国科学院长春光学精密机械与物理研究所,长春 130033;2. 中国科学院大学,北京 100049 )
基于运动学原理的支撑结构在大口径望远镜的底支撑中早已得到广泛运用,但是在主镜侧支撑中的应用还不成熟。本文首先解释了一种基于运动学原理的侧支撑结构的特点,然后针对一个直径2.04 m的主镜, 使用有限元软件ANSYS中的参数化设计语言进行了具体的结构设计与分析。接着以主镜在光轴竖直状态下的镜面面形误差的均方根值(RMS)为目标函数,采用模拟退火算法,对支撑结构中各支撑杆的支撑反力进行了优化。最后得到的镜面变形的RMS值为16.67 nm。计算不同俯仰角下的镜面变形,均达到了RMS小于/30的技术要求。
运动学;侧支撑;大口径主镜
0 引 言
为了满足探索更遥远的宇宙空间奥秘的需要,人们希望将天文光学望远镜的口径越造越大,以得到更强的集光能力和更高的分辨能力[1]。对于传统的望远镜而言,主镜的变形往往对轴向支撑更为敏感,但是随着大口径反射镜径厚比的增大,以及凹面镜、弯月镜的应用,侧向支撑的设计也变得越来越重要了。
常见的侧支撑方法有杠杆平衡重支撑、液压/气动支撑、水银带支撑等。杠杆平衡重支撑效果稳定,对温度的适应性好,但是这种方法不仅会额外的增加主镜室的重量,还会大大降低系统的谐振频率[2]。液压/气动支撑采用液压(或气压)元件代替机械部件对镜子进行侧支撑,可以消除由摩擦产生的一些问题,但是在俯仰角变化时需要对支撑点压力进行调节控制[3],液压/气压元件对密封性的要求也会一定程度上降低系统稳定性。水银带支撑是将一个圆环形的、填充有水银的管子放置在反射镜侧面和刚性的圆柱筒壁之间,产生一个近似于“理想”安装的力场,但是这种方法的支撑效果受水银管的不规则度影响较大,且只适合应用于比较好的环境中,水银本身也对人的身体有危害[4]。此外还有六点切向柔性侧支撑[5]和推-拉-剪切侧向支撑[6]等方式,它们都有各自的优缺点。出于某2 m级望远镜制备的需要,本文在前人研究的基础上提出了一种全新的、基于Kinematic原理的级联侧支撑结构。这种被动支撑结构有着支撑精度高,装调简单,对杆件精度要求较低,易于扩展与优化等特点。以该2 m级主镜为研究对象,分析了该结构的原理与特点,并以镜面均方根值(RMS)值为目标函数,使用Isight整合了ANSYS与Matlab[7],对支撑结构进行了优化,证明了这种结构的合理性与可行性。
1 Kinematic原理在侧支撑中的应用
Kinematic(运动学的)作为Dynamic的一个分支,是A.M.Ampere(1775-1836)在分析物体在外力作用下的自身运动性质时提出的概念。
一个Kinematic连接限制机械系统所有的六个自由度,而没有任何一个强加的约束。相比于其他连接方式,Kinematic连接具有位置的重复性能力和对严重的机械扭曲或弯曲的自动调整能力[8-10]。
以光轴方向为向,当底支撑已经完美约束主镜沿轴平移,绕轴旋转,绕轴旋转这三个自由度时,侧支撑需要约束主镜剩下的三个自由度。图1为最经典的符合Kinematic原理的侧支撑方式,由于侧支撑与主镜的接触处使用柔性杆件,侧支撑与主镜的之间的运动副可等效为旋转副。
此时,任意两根杆与主镜组成一个四连杆机构,在两根杆的约束下,主镜可绕瞬心转动。当三个瞬心不重合时,主镜在该平面上的三个自由度被完美约束。当主镜为大口径平凹镜时,一组经典的Kinematic结构会产生可重复的、不可改正的、过大的波前像散误差[11],因此需要对该结构进行改造。改变支撑杆围城的三角形的内切圆大小可有效减小产生的像散误差,但是当三个瞬心交于一点,主镜绕瞬心旋转的自由度被放开,三个约束中有一个退化成为虚约束,需要再加一组定位杆抑制主镜的旋转,结构如图2所示。
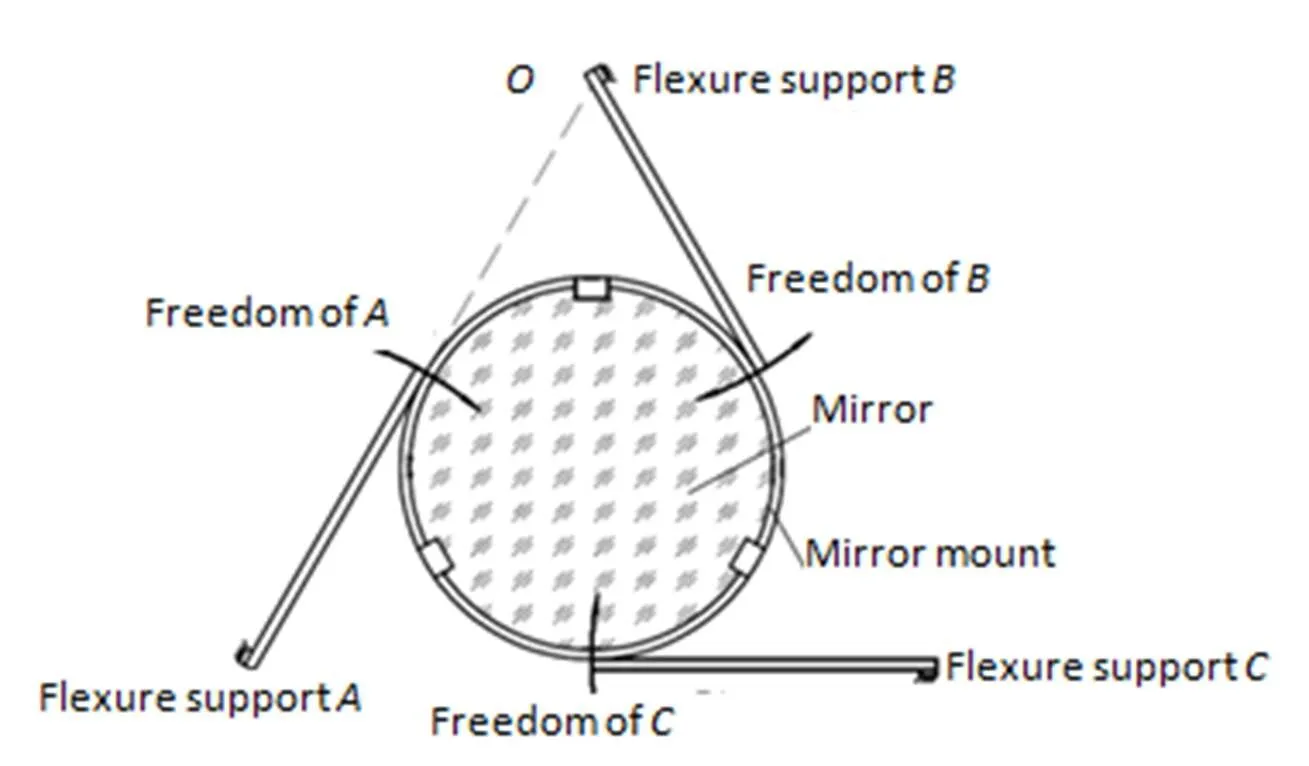
图1 经典的符合Kinematic原理的3点侧支撑概念图
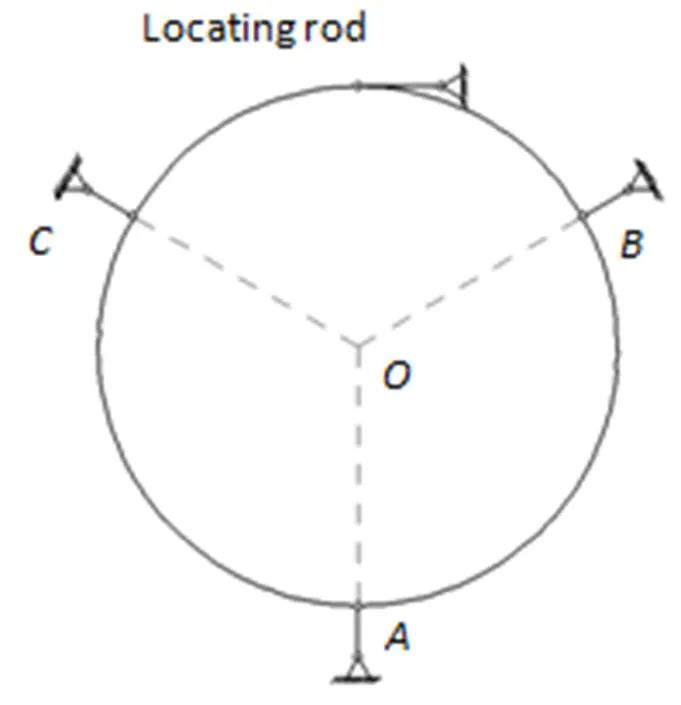
图2 瞬心交于一点时的侧支撑概念图
使用Whiffletree级联结构,可以在不增减约束个数的情况下增加支撑点的数目,从而减小各支撑点的应力。
2 侧支撑方案的设计与优化
2.1 主镜模型
本文使用有限元软件Ansys进行有限元分析,以某2 m级SiC轻量化平凹主镜为研究对象进行侧支撑方案的设计与优化,镜子的有限元模型如图3所示。镜子的直径为2 040 mm,中间孔直径320 mm,镜子边缘厚度为190 mm,在外圈有宽约为20 mm的压边。该模型采用SOLID186单元,使用105 776个单元精确模拟了镜子包括轻量化蜂窝结构在内的各种主要特征。镜子的光轴方向与系统坐标系的轴一致,镜子的背部平面与系统坐标系下的平面重合。该2 m级望远镜采用表面均方根(RMS)作为主镜面形的评价指标,要求RMS值优于波长(=632.8 nm)的1/30。由于系统一阶谐振过低会导致系统控制带宽过窄,严重影响系统响应速度[12],因此要求一阶谐振频率需高于15 Hz。

图3 主镜及底支撑模型
该主镜的底支撑采用的是18点Whiffletree结构。18点分为内外两圈,内圈6点,均布于直径为783 mm的圆周上,外圈12点,均布于直径为1 708 mm的圆周上。背部支撑杆通过刚性垫固接在镜子背部,通过柔性关节实现对自由度的释放,通过支撑杆自身的柔性实现与侧支撑系统的解耦。底部支撑约束了主镜沿向平移,绕轴转动,绕轴转动的三个自由度。支撑结构使用BEAM188单元,不同位置的杆件根据各自刚度的需要使用了不同的截面面型。
主镜要求俯仰角范围为0°~90°。当主镜俯仰角为90°时,光轴垂直于水平面,镜子重力完全由底支撑承担,侧支撑仅提供主镜的位置约束;当主镜俯仰角为0°时,光轴平行于水平面,镜子重力完全由侧支撑承担,底支撑仅提供主镜位置约束。侧向支撑所引起的最大镜面变形发生在望远镜指向地平方向的时候[13],因此首先考虑重力沿镜子径向(轴负向)的情况。
2.2 侧支撑支撑点位置的选择
为保证足够多的支撑点,侧支撑在经典的三点Kinematic侧支撑基础上,通过增加Whiffletree级联的方式使支撑点扩充至12个。当径向力作用在水平反射镜的中性表面上时,镜子的像散畸变最小,因此所有的侧向支撑点均位于镜子中性面,距离背部平面85.579 mm的平面上。在设计支撑杆件时,首先用有限元软件计算得到各约束点的支撑反力,再根据支撑反力的大小设计各旋转副的位置,以完成支撑力的合理分配。
第一种支撑方案如图4所示,3组Whiffletree结构彼此成120°角,12个支撑点围绕镜子外圆周等间距排列。
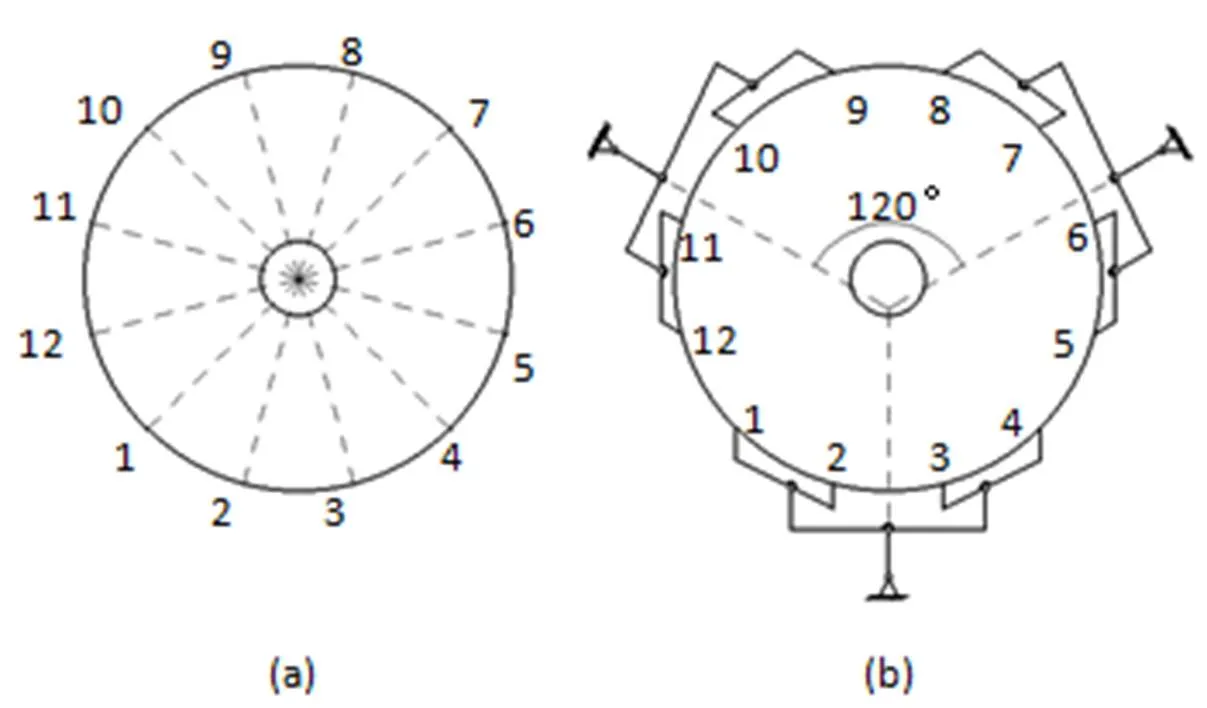
图4 第1种侧支撑方法示意图
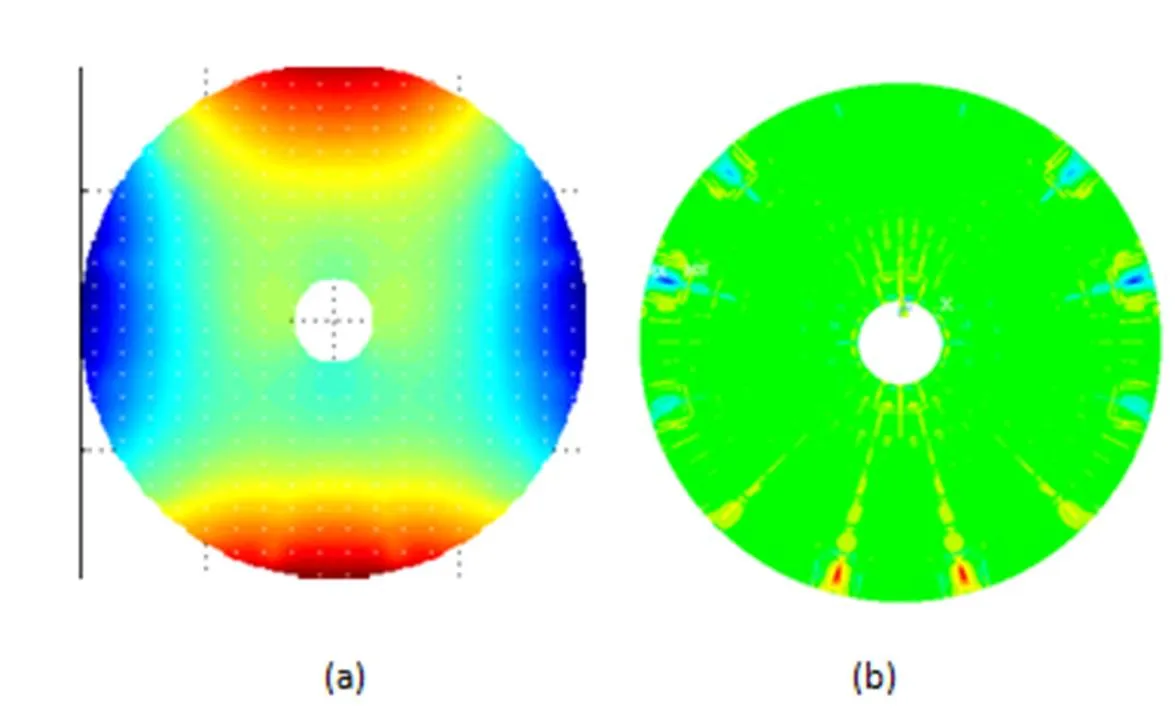
图5 第1种支撑方法效果云图
这种支撑方式结构简单,对称性好,但是由于上面两组Whiffletree结构倾斜角度过大,在提供一定的方向的支撑力的同时,会各自在方向上附加更大的干扰力,从而导致较大的,无法修正的像散畸变。图5表示了这种支撑下镜面应变(图5(a))与镜面应力(图5(b))。
在该支撑作用下,镜面RMS值为134.46 nm,主要畸变为像散。由图5右可知,第一种支撑方法会给镜面带来不可忽视的分布较广且不均匀的巨大应力,使得镜面出现了极大的像散。为改善镜面的应力分布,改变支撑点的位置,提出第二种支撑方法,如图6所示,下方1~4号点位置不变,5~12号点改为等角间距22.5°,各支撑点位置关于平面对称,支撑效果如图7所示。其镜面RMS为113.48 nm,主要畸变依然为像散。由图7(b)可以看出,镜面上的应力已经得到了极大的改善。由RMS的变化可知,镜子表面变形量也有了一定程度的减小。
通过改变支撑点位置的方法虽然有效减小了镜面上的应力,但是镜面RMS值与像散过大,支撑效果并不理想。考察各杆支撑力时发现,上方两组支撑杆件一共只承担了主镜一半的重量,却各自带来了主镜重力大小的方向的干扰力。下方支撑杆件中压力过大,上方杆件又带来了较大的干扰力,共同导致了较大的镜面变形与像散。

图6 第2种侧支撑方法示意图

图7 第2种支撑方法效果云图
2.3 支撑方案优化
为得到符合要求的镜面RMS值与像散值,需针对各杆提供的支撑力进行优化。影响支撑力的因素有三个,一是支撑点的位置,二是杆件的偏转角度,三是各级杠杆中旋转副的位置。支撑点的位置以杆件的偏转角度共同决定了每一组支撑杆件中总的支撑力的大小与方向,旋转副的位置则决定了每一个杠杆系统中杠杆两端力的比例。由于镜子结构较复杂,有限元单元较细密,改变支撑点位置十分困难,因此只针对杆件的偏转角度与杠杆结构中旋转副的位置进行优化。由于像散值与镜面RMS值往往成正相关关系,为节省优化时间,目标函数选为计算相对简单的RMS值。
三组杆件中共有9个杠杆结构,加上各自的偏转角共有12个参数,考虑到支撑结构关于的对称性,两侧杆件的偏转角度以及旋转副对应的位置应该一致,底部的旋转副位于底部杆件的中心。优化问题可以表示为
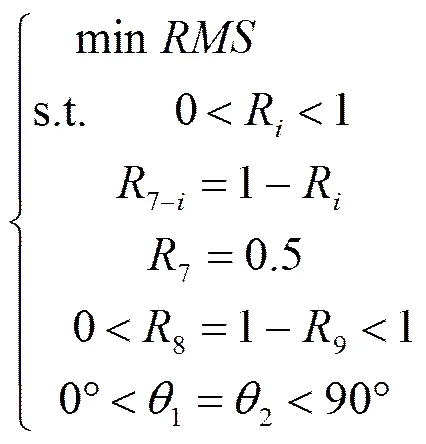
以第二种方法中的参数为起始点,在经过347次迭代后得到最优值,优化结果列于表1,为便于加工,将优化值取整,精确到0.01。
最终RMS从起始点的113.48 nm优化到了16.67 nm,对应的镜面面形如图9所示。计算其Zernike系数可知,主镜的0°像散和45°像散仅为0.23 nm和0.16 nm,完全符合侧支撑的技术要求。
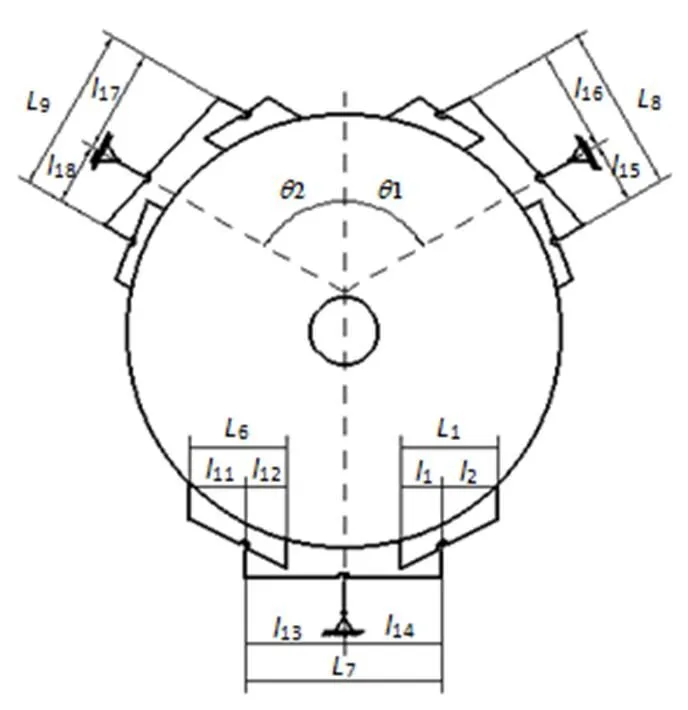
图8 优化参数示意图

图9 优化后镜面变形云图

表1 优化结果
使用Ansys对该支撑下的主镜进行模态分析,得到前六阶模态,如表2。由表2可知,系统一阶模态为39.51 Hz,满足一阶谐振频率高于15 Hz的要求。
2.4 侧支撑俯仰角分析
以上设计与优化均是针对光轴水平,主镜重力完全由侧支撑提供的情况,但在实际使用中需要望远镜能在0°到90°的俯仰角范围内都正常工作。通过改变有限元模型中的重力方向,模拟在当侧支撑与底支撑共同作用时,主镜在不同俯仰角状态下的变形情况,分析结果如表3所示。

表2 系统前六阶模态与振型
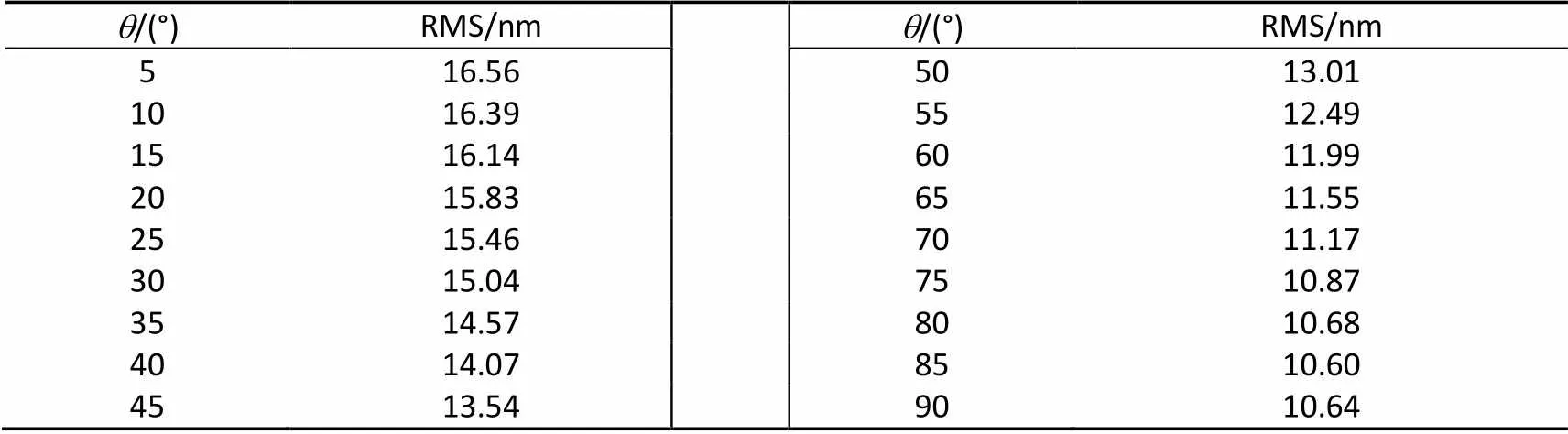
表3 不同俯仰角q下镜面RMS值
3 结 论
本文基于Kinematic原理,针对某2 m级大口径轻量化平凹镜主镜,提出了Whiffletree侧支撑结构,利用有限元模型,分析了不同支撑点位置与支撑杆角度对支撑效果的影响,使用模拟退火算法对各支撑杆的支撑反力进行优化,最终得到了一个达到面形精度要求的侧支撑结构。主镜在光轴水平状态下RMS为16.67 nm,在不同的俯仰角下镜面的面形均小于/30,系统一阶谐振频率为39.51 Hz,优于15 Hz的设计指标,说明所设计的侧支撑可以达到要求。该基于Kinematic原理的Whiffletree侧支撑方法在今后的大口径望远镜的侧支撑方案的选择上具有较高的指导意义。
[1] 崔向群. 采用主动光学的大口径单块薄镜面的支撑系统 [D]. 南京:中国科学院紫金山天文台,1995:3.
[2] 傅家,张景旭,王富国,等. Whiffletree 结构在主镜侧支撑中的应用研究 [J]. 红外技术,2012,34(4):209-216.
FU Jia,ZHANG Jingxu,WANG Fuguo,. Application of Whiffletree for Primary Mirror Lateral Support [J]. Infrared Technology,2012,34(4):209-216.
[3] Myung K Cho. Optimization of Support Point Locations and Force Levels of the Primary Mirror Support System [R]. GENIMI Telescopes Project,RPT-O-G0017,1993.
[4] Jr Paul R Yoder. Opto - Mechanical Systems Design:3rd Ed [M]. New York:CRC Press,2006:460-461.
[5] 吴小霞. 弯月薄镜的切向侧支撑设计研究[J]. 长春理工大学学报:自然科学版,2011,34(1):53-56.
WU Xiaoxia. Design Research on Tangent Lateral Support of Thin Meniscus Mirror [J]. Journal of Changchun University of Science and Technology:Natural Science Edition,2011,34(1):53-56.
[6] 吴小霞,郝亮,邵亮,等. 弯月薄镜的侧向支撑 [J]. 光学精密工程,2016,24(3):553-559.
WU Xiaoxia,HAO Liang,SHAO Liang,. Lateral support of thin meniscus mirror [J]. Optics and Precision Engineering,2016,24(3):553-559.
[7] 郭鹏,张景旭,杨飞,等. TMT三镜缩比系统支撑点位置优化 [J]. 激光与光电子学进展,2015,52(11):198-203.
GUO Peng,ZHANG Jingxu,YANG Fei,. The optimization of TMT M3 Prototype’s support points [J]. Laser & Optoelectronics Progress,2015,52(11):198-203.
[8] McCarthy J M. An Introduction to Theoretical Kinematics [M]. Cambridge:MIT Press,1990:20-22.
[9] Oschuetz L,Wessolek D,Sattler W. Constructing with Movement:Kinematics [C]// Proceedings of the Fourth International Conference on TEI,Cambridge,USA,January 25–27,2010:257-260.
[10] Carretero J A,Nahon M,Buckham B,. Kinematic analysis of a three-dof parallel mechanism for telescope applications [C]// Proceedings of the 1997 ASME Design Engineering Technical Conferences,Sacramento,California,September 14-17,1997:1427-1435.
[11] Neill D R,Krabbendam V,Andrew J,. Active tangent link system for transverse support of large thin meniscus mirrors [C]// Optical Engineering and Applications,SPIE,San Diego,USA,September 17,2007:66650F-01-66650F-12.
[12] 杨飞,刘国军,赵宏超,等. 30 m望远镜三镜系统刚度分配与分析[J]. 光学精密工程,2016,24(1):152-159.
YANG Fei,LIU Guojun,ZHAO Hongchao,. Stiffness allocation and analysis of TMT M3S [J]. Optics and Precision Engineering,2016,24(1):152-159.
[13] 程景全. 天文望远镜原理和设计[M]. 北京:中国科学技术出版社,2003:60-62.
[14] 范磊,杨洪波,张景旭,等. 2 m SiC反射镜拱形轻量化结构设计[J]. 光电工程,2010,37(10):71-76.
FAN Lei,YANG Hongbo,ZHANG Jingxu,. Lightweight Design for 2 m SiC Arch Mirror[J]. Opto-Electronic Engineering,2010,37(10):71-76.
Design and Optimization of Kinematic Lateral Support on 2 m SiC Primary Mirror
LIU Bo1,2,ZHANG Jingxu1,WANG Fuguo1,LIU Xiangyi1
( 1. Changchun Institude of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China;2. University of Chinese Academy of Sciences, Beijing100049, China )
The support structure based on kinematic principle had been wildly used in the axial support on large-diameter telescope. But it is not maturely applied in the lateral support system. A lateral support structure based on kinematic principle is explained. Based on a primary mirror with a diameter of 2.04 m, a support structure with more details was designed and analyzed by the ANSYS Parametric Design Language. Selected the Root Mean Square (RMS) of the primary mirror when the optical axis was vertical as the objective function, the support reaction was optimized by the simulated annealing algorithm. Final surface error RMS was 16.67 nm. Surface error with different obliquities were calculated, which meets the requirement that the RMS should be less than/3.
kinematic; lateral support; large-diameter primary mirror
1003-501X(2016)12-0046-06
TH751
A
10.3969/j.issn.1003-501X.2016.12.008
2016-06-19;
2016-07-13
国家自然科学基金项目(11403023)
刘博(1992-),男(汉族),湖北黄冈人。硕士研究生,主要研究工作是大口径望远镜主镜支撑结构设计。-mail: liubo2014@mails.ucas.ac.cn。
