激光通信地面站600 mm主镜径向支撑设计
2020-09-29李小明张天硕张家齐张立中
李小明,张天硕,张家齐,李 响,张立中
1长春理工大学空间光电技术国家地方联合工程研究中心,吉林 长春130022;
2长春理工大学机电工程学院,吉林 长春 130012

1 引 言
某激光通信车载地面光端机主镜采用微晶材料。考虑到成本等问题,由于光端机对质量等指标没有严格要求,因此主镜未做轻量化处理,质量较大,且随着光学天线的转动,主镜光轴方向与重力方向之间的角度将不断发生变化。为保证主镜面形质量,支撑结构需同时满足轴向和径向上的重力卸载要求[1-2]。重力在光轴方向上的分力通过多点背部支撑卸载,其设计方法较为成熟并已得到大量应用;重力在径向上的分力需采用径向支撑卸载,常用的径向支撑有多点支撑、水银支撑、带支撑、滚轮链式支撑等支撑方式[3]。多点支撑结构较为复杂,且当所需支撑点数较多时易造成支撑结构尺寸较大;带支撑和滚轮支撑不适用于有俯仰角度变化的反射镜;水银支撑要求工作环境不能有剧烈振动且具有污染环境的可能,但对于地面站主镜是较为理想的支撑方案。
在水银支撑研究方面,杜俊峰对1.3 m主镜的水银带径向支撑进行了分析和设计,取得了较好的支撑效果,但未见详细的测试[4];高明辉等对水银带支撑的有限元分析方法进行了研究和探索,但未进行工程设计[5];刘国庆采用分析和面形拟合的方法对水银带支撑进行了研究,但未见其工程应用[6]。
本文针对某600 mm口径的激光通信地面站主镜径向支撑结构进行了分析与优化设计,保证了主镜面形质量满足通信要求。
2 主镜参数及支撑要求
考虑到地面站对重量指标的要求并不严格,系统主镜采用平背形结构。系统主镜外径为φ620 mm,有效通光口径为φ606 mm,中心孔直径为φ109 mm,厚度为100 mm,曲率半径R=-1760.025 mm,采用线胀系数较小的微晶材料,质量约65.4 kg,重心平面与镜背距离为41.75 mm。系统主镜加工后面形误差PV值优于λ/7,RMS值优于λ/50,系统工作角度为0~80°。加工后的主镜如图1所示。采取支撑方案后主镜面形精度设计要求为RMS值优于λ/30,PV值优于λ/5。
激光通信地面站与低轨卫星等移动目标进行通信时,光学天线会不断转动,重力对主镜的影响不断变化,因此必须采用轴向与径向复合支撑结构同时卸载重力。光学天线采用背部9点支撑卸载轴向重力,在3点支撑的基础上,在每一个静定的支撑点上通过一层刚性浮动支架把支承点数扩大为9点再作用于反射镜,对轴向重力形成多点卸载,镜面变形得到了明显改善。由于背部支撑采用托盘与主镜背部接触,不具备定位能力,径向支撑需在卸载径向重力的同时对主镜进行定位。主镜背部支撑主要卸载垂直镜面方向的重力,水银支撑卸载沿径向方向的重力,两者无法完全解耦。本文对径向支撑的研究是在背部9点支撑的基础上开展的,并开展了面型分析。
3 径向支撑方案
为保证径向支撑不会产生额外的附加弯矩从而造成主镜面形精度下降,径向支撑设计时一般支撑合力通过主镜的重心平面,以平衡主镜在任何工作角度下重力的径向分力。主镜径向支撑形式主要有基于运动学原理的径向浮动支撑和多点边缘浮动支撑[7-9]。

图1 主镜实物图Fig.1 Photograph of the primary mirror
基于运动学原理的径向支撑结构是根据三点定位原理,采用机械结构对主镜进行侧向支撑,支撑点数为3的倍数,能够保证结构稳定性,主要有Whiffle-tree结构和Bipod结构;多点边缘浮动支撑形式是利用杠杆平衡重锤或在支撑点处施加浮动支撑力,不限制主镜的自由度,因此这种径向支撑必须有中心定位,主要有水银带支撑形式、带式或滚轮链式支撑形式等。
Whiffle-tree和Bipod结构在径向上需为支撑机械结构预留结构空间,同时随着主镜尺寸增大,为改善主镜应力所需的径向支撑点数也增加,因此造成其结构复杂、径向尺寸增大,不利于地面站的小型化等缺点。带式或链式支撑结构是通过柔性带或链在主镜外边缘的下部施加沿径向方向的支撑力。由于光端机工作时天线实时跟踪运动目标,主镜工作角度不断变化,带式支撑无法满足需求。水银带支撑是一种近似理想的支撑形式,属于浮动支撑但不具有定位功能,需要增加中心支撑,但其具有结构简单、质量较轻等优点。水银带支撑结构在主镜径向布置水银带,依靠水银产生的浮力卸载主镜的径向重力,因此会导致主镜产生不均匀且可随重力方向变化的支撑力,且当光轴水平时水银带支撑力最大。
综上分析,光学天线主镜设计为水银支撑与中心支撑相结合的复合支撑结构,可使水银卸载大部分主镜径向重力,且中心支撑卸载小部分径向重力的同时,能保证主镜空间定位。主镜复合支撑结构如图2所示。
4 水银带支撑设计
水银带支撑形式属于浮动支撑,在反射镜侧面会产生沿径向正比于水银柱高度均匀变化的侧向力,侧向力等于所需卸载的重力。天线在俯仰方向转动时水银高度随之变化,可保证沿径向上的作用力与重力的径向分力一致[10]。主镜在俯仰方向上的工作角度为0~80°,且主镜始终为单侧受力,因此选用水银半充满方案,即水银只充满整个水银带的50%,对反射镜的作用范围为±90°。
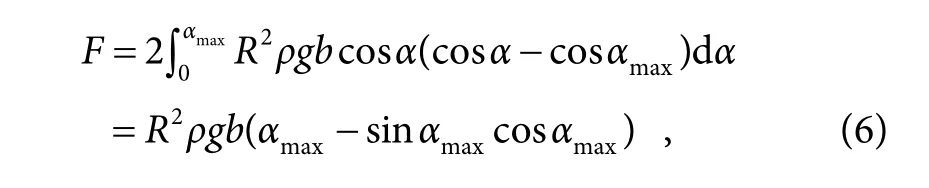
当反射镜镜面法线与重力间角度为θ时,水银带在主镜侧向点源处产生的侧向力dF为[11]

其中:ρ为水银密度;g为重力加速度;h为水银高度;R为主镜半径;α为点源角度;αmax为最大包络角度;b为水银带宽度;dA为点源面积,且有:

水银带对主镜产生的“浮力”与水银柱高度成正比,随着水银柱的升高浮力逐渐增大。
点源上产生与重力方向相反的浮力为

水银产生的总浮力为

由上式可见,最大包络角度固定后,水银带宽度与卸载重力成正比,卸载重力增大,水银带宽度也随之增加,且水银带对主镜作用力面积增大。在进行有限元分析时需在主镜侧面有限元单元上施加相应的径向压强以仿真水银带对主镜的力学影响。水银对主镜的径向压强P为

当最大包角为 90°时,水银带在主镜侧面产生的压强如图3所示。
由于地面站激光通信系统主镜为球面镜且背部为平背形结构,主镜在不同径向上厚度不相等,即边缘厚度大中心厚度小,所以在轴向上越靠近背部反射镜镜体刚度越大,越靠近镜面方向镜体刚度越小,越易受到外力影响。水银带的轴向支撑位置会对主镜面形产生较大影响,支撑位置靠后,主镜受重力影响严重;支撑位置靠前,水银带压力影响主镜面形。图4为宽度40 mm水银带在不同支撑位置主镜受1g重力作用时的面形变化。可见水银带支撑位置位于重心平面指向镜面方向约5 mm时支撑效果最好,同时水银带支撑位置靠前可避免主镜产生向前的倾覆力矩。
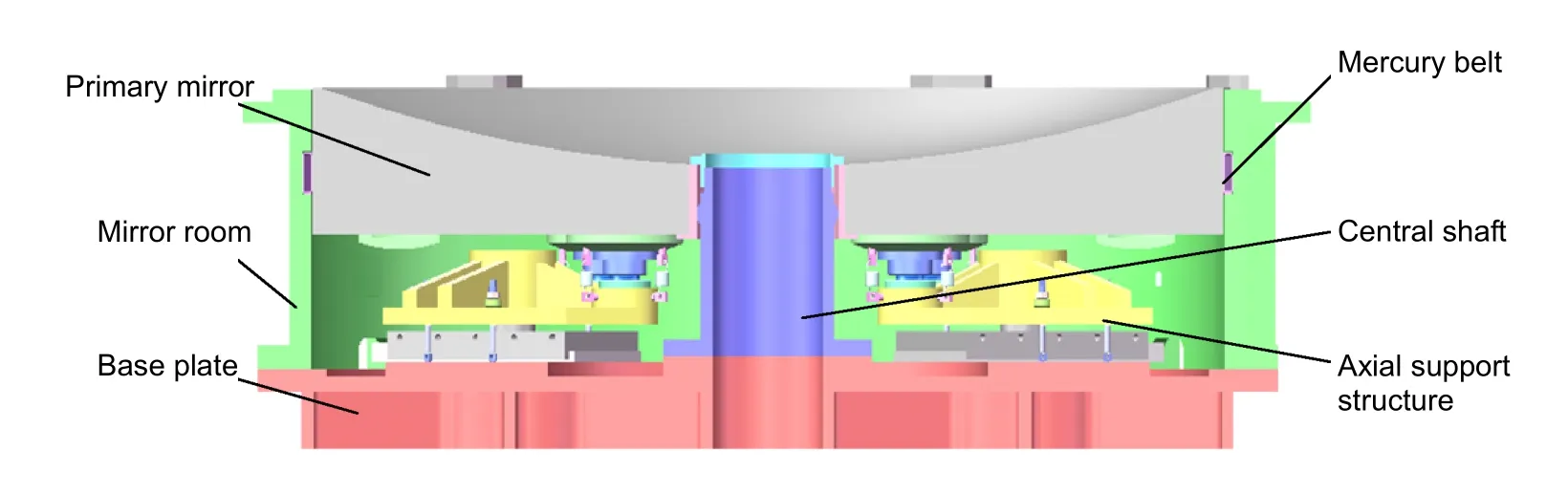
图2 主镜复合支撑结构Fig.2 Flexible support of the primary mirror
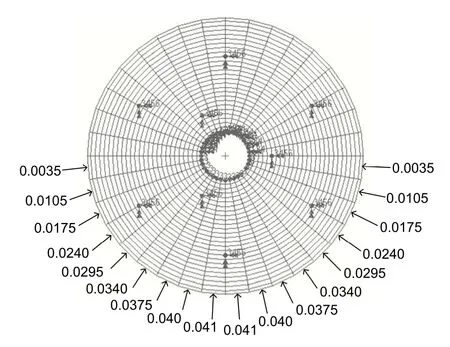
图3 主镜径向压强分布(MPa)Fig.3 Radial pressure distribution (MPa)
根据其他学者的研究,卸载力一般在主镜重量的90%~70%之间[4,10]。在此范围内对不同卸载力小下主镜面型精度进行了分析,结果如表1所示。可见,对于本系统,选取80%卸载力效果较好。
径向支撑由中心支撑与水银带支撑共同卸载径向重力,当中心支撑卸载力过大时,会造成中心支撑结构对主镜的压力增大从而影响主镜面型。同时,为保证主镜位置精度,中心支撑机构设计难度加大。据研究表明,水银带卸载力一般在主镜重量的70%~90%之间[4]。本文中水银带设计为卸载 80%重力,中心支撑卸载20%重力。根据式(4),水银产生的总浮力为
其中:b为水银带宽度,根据水银带卸载的主镜重量,经计算得到水银带的宽度为25.32 mm。
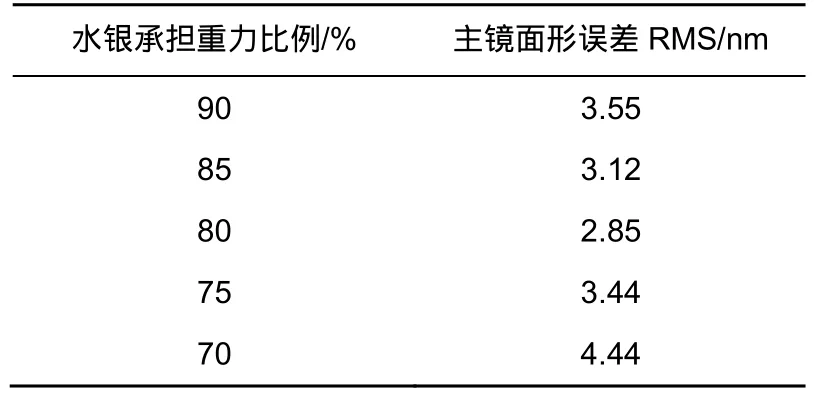
表1 不同卸载比例下的主镜面形精度Table 1 Precision of the main mirror shape under different unloading ratios

图4 水银带不同轴向支撑位置时主镜面形变化Fig.4 Mirror-shaped error at different axial support positions
5 中心支撑设计
中心支撑组件的主要作用是对主镜进行中心定位且能卸载一部分重力,是径向水银带支撑的辅助支撑结构,要求强度较好、刚度较大、抗弯能力较强。中心支撑组件主要是由芯轴、镶套、圆螺母组成,芯轴和镶套材料选择与主镜材料线胀系数相匹配的铟钢。嵌套与主镜采用粘结的连接方式,芯轴上端凸出部分为圆弧形,并与镶套内壁形成线接触,且接触部分位于主镜的重心平面,保证了主镜中心定位的要求,同时又可以实现小角度灵活转动。加工后的芯轴如图 5所示。
6 支撑结构有限元分析
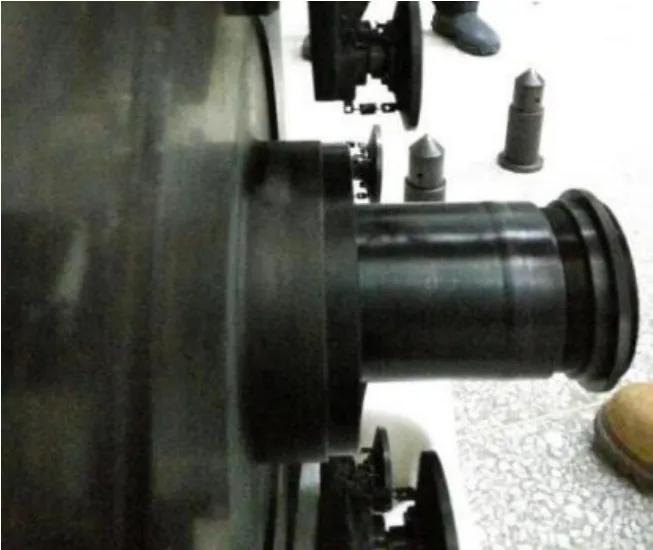
图5 芯轴实物图Fig.5 Mandrel diagram
采用 Patran/Nastran对水银带与中心支撑共同作用下的主镜变形进行仿真分析,采用球面方程对数据进行拟合分析得到主镜的面形误差。当主镜垂直放置时主镜变形云图如图6所示,重力产生的面形误差为31.6 nm (PV),5.7 nm (RMS)。由分析结果可见,当主镜垂直时主镜的全部重量由中心轴和水银带支撑承受,变形区域主要在主镜上部和下部,其下部变形由水银带造成,云图呈带状分布且均匀过渡;上部变形主要是由重力作用和中心支撑作用产生。
小口径反射镜精抛时一般连同支撑机构进行整体抛光加工,支撑机构产生的误差可在加工中消除,加工完成后的主镜面形误差即为主镜在支撑结构作用下的面形。大口径主镜和支撑结构受尺寸和重量的限制,必须单独加工后再进行装校,支撑机构产生的面形误差必然影响主镜面形,主镜的最终面形精度由主镜加工后面形与支撑机构产生的面形误差共同决定,现未见对该方面的研究。为评价支撑后主镜面形,整体面形误差PV值按主镜加工面形误差PV值与支撑结构产生面形误差PV值叠加计算,RMS值按两者的均方根值计算。采用该支撑结构后主镜的最终面形为

对水银带和背部9点复合支撑条件下主镜从竖直状态(0°)转动到水平状态(80°)面形变化进行分析,结果如图 7所示。分析可见主镜在垂直状态下(0°)时面形误差最大,径向支撑机构可以保证主镜在不同工作角度下的面形精度。
7 主镜面形检测
装调完成后对光轴水平时主镜支撑的最终状态进行检测,图8为检测装置,为便于检测,将主镜组件安装于伺服转台上,通过支撑脚固定主镜角度使主镜光轴处于水平状态。检测结果如图9所示,RMS值优于λ/37,PV值优于λ/5。
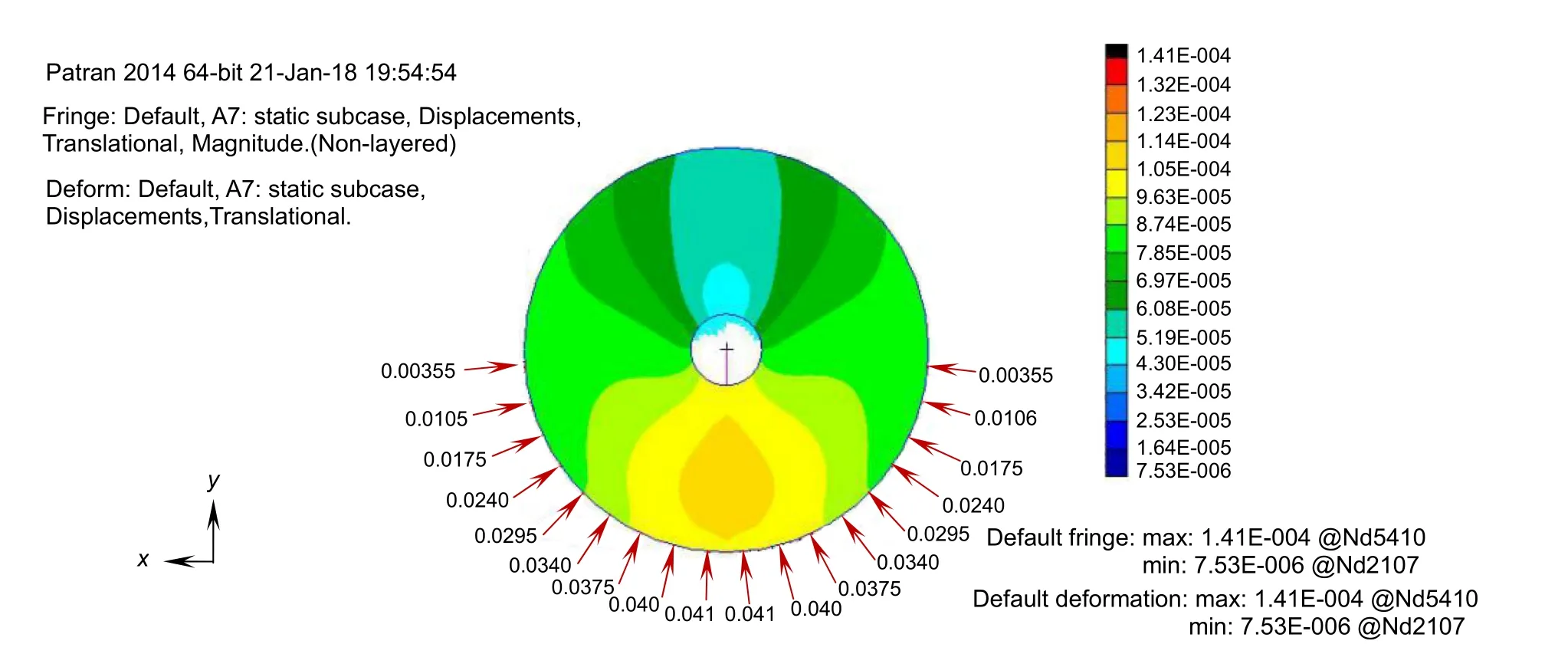
图6 垂直状态下主镜变形云图Fig.6 Vertical deformation of the primary mirror

图7 主镜不同工作角度下面形分析结果Fig.7 Mirror-shape error at different angles
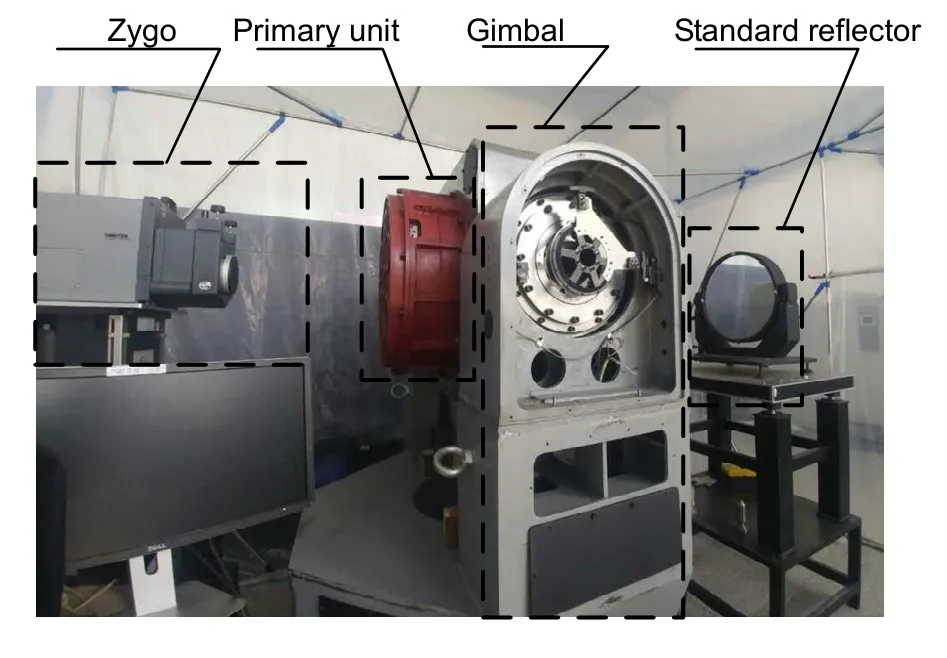
图8 面形检测现场Fig.8 Mirror-shape error detection

图9 面形检测结果Fig.9 Mirror-shape error detection results
8 结 论
本文针对 600 mm 口径激光通信地面光端机主镜,在背部9点支撑的基础上采用水银带与中心支撑相结合的方法,设计了一种复合径向支撑结构,分析优化了水银带支撑位置和结构参数。实际应用到激光通信地面站光学天线主镜支撑后,主镜组件实测结果表明采用设计的支撑结构主镜面形误差 PV值优于λ/5,RMS值优于λ/37,径向支撑完全达到设计目标,保证了激光通信主镜的面形误差要求。