核环境水下双目视觉立体定位技术研究
2017-01-17黄文有徐向民吴凤岐邓志燕
黄文有,徐向民,吴凤岐,吴 玉,邓志燕
核环境水下双目视觉立体定位技术研究
黄文有1,2,徐向民1,吴凤岐2,吴 玉2,邓志燕2
( 1. 华南理工大学电子与信息学院,广州 510640;2. 中广核研究院有限公司,广东深圳 518124 )
为提高核电站特殊作业环境下(高放射性,同时兼具水下、高温、高压、硼酸等)各智能装备的作业定位精度,本文建立了综合考虑折射效应和透镜畸变影响的水下双目视觉定位非线性数学模型。以摄像机针孔成像模型为基础,分析硼酸水下视觉的成像原理以及影响因素并提出了一种适用于非结构环境的水下双目视觉定位方法。为验证所提方法的有效性,本文在空气、普通水以及不同浓度硼酸水下进行对比实验。实验结果表明,不同浓度硼酸对摄像机成像折射影响不大,且利用该方法计算的目标物属性尺寸与实际值接近,误差小。
核电站;硼酸;水下;双目视觉;立体定位
0 引 言
视觉感知作为机器人关键技术之一,目前已在核电站智能装备与机器人中广泛应用,如:燃料组件缺陷检测装备、堆芯照相、核电站环境监测机器人以及严重事故系列救灾机器人等。国内外相关学者陆续开展了核电特殊水质(高放射性,同时兼具水下、高温、高压、硼酸等)的视觉技术研究,特别是水下视觉定位技术[1],但很多尚处在起步阶段。如日本Shinji Yamamoto等人[2],利用光视觉技术检测核电站设备蒸气泄漏和漏水情况;韩国电力科学研究院Byung-Hak Cho等人[3],设计水下机器人视觉系统用于检查核电站反应堆容器内部情况,系统的检测精度可达到1cm和2°;Ishibashi S.将双目立体视觉应用于普通水下机械手与目标物的三维空间距离获取[4];国内Li H.等将水下机器人双目视觉三维定位的结果应用于机器人抓取[5]。
为提高核电站特殊作业环境下各智能装备的作业定位精度,本文根据计算机视觉中的双目视觉成像基本原理[6-7],针对光在不同介质中传播时的折射现象,结合多层平面折射几何以及综合考虑透镜畸变影响建立了适用非结构环境的水下双目视觉成像数学模型。为能有效分析核电特殊水质对摄像机成像的影响以及验证所提水下双目视觉定位方法的有效性,在空气、普通水以及不同浓度硼酸水下进行了对比实验。
1 核环境水下双目视觉定位模型
在双目立体视觉中,通过求取两摄像机反投光线交汇点可以定位空间三维坐标[8]。应用于核环境的水下双目视觉系统不同于普通的水下双目摄像机,其摄像机外壳加装一定厚度的防水辐射屏蔽罩,因此,当其位于水下工作时,光线在水下成像过程中会经过水、玻璃和空气3种折射率不同的介质而发生折射现象。据此建立的模型如图1,以左摄像机系统为例(后续相关描述相同),对点的反投光路进行分析。为摄像机坐标系,与世界坐标系重合,为图像平面坐标系,为物点的水下像点,为物点在空气中像点,与分别为光线与防水罩玻璃上、下表面的交点,分别为光线的入射角、一次折射角、二次折射角,分别表示水、玻璃、空气的折射率,为与轴的夹角,表示摄像机光心原点到防护玻璃内表面的距离,表示防护玻璃的厚度,表示摄像机的焦距。
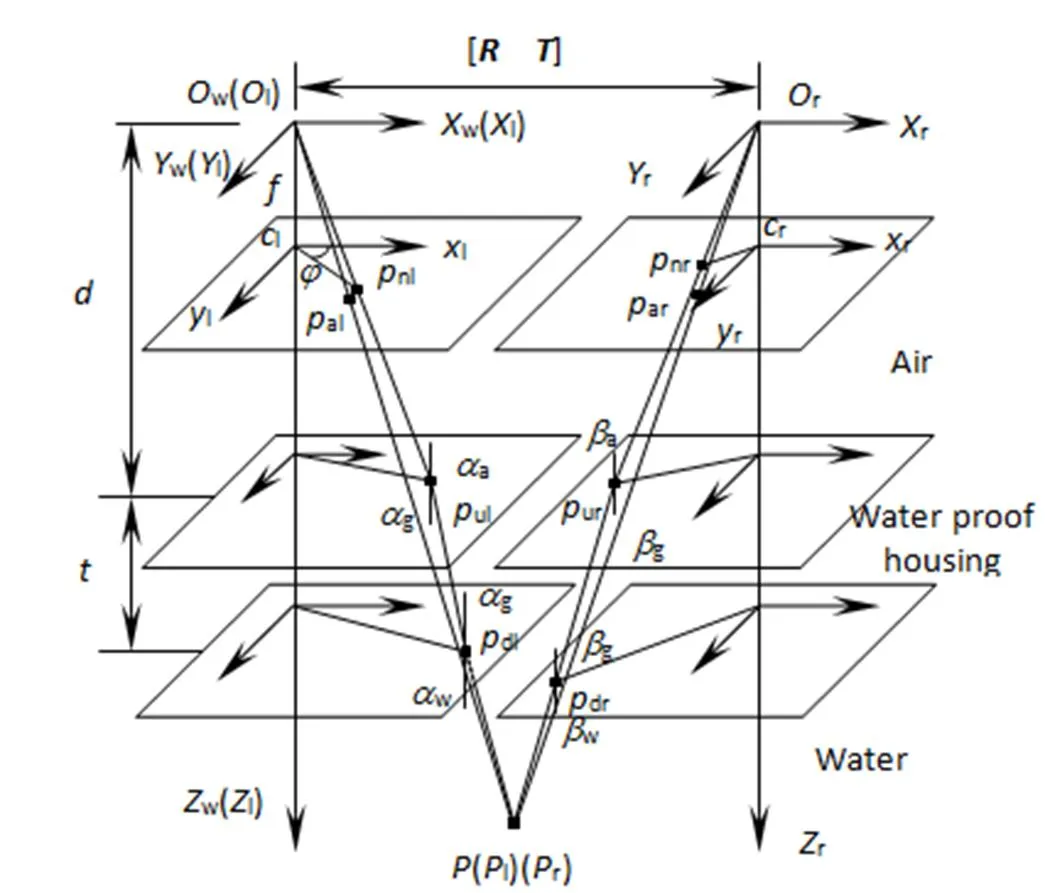
图1 水下双目视觉模型
以上为理想情况,工程中由于摄像机非理想针孔成像且成像过程存在各种噪声和系统标定误差,实际的两条反投光线和最终未必交于一点,且两者不可能平行,故为异面直线对。由于在几何上使用异面直线公垂线的中点逼近空间点的误差较小[9],且具有优良的抗噪性[10],在工程实现中,我们近似认为物点为反投光线和的公垂线中点。为进一步简化计算,可将其转化到空气成像模型中,近似认为空气模型中的两条异面反投光线与的公垂线中点即为待求的空间点。
2 水下双目视觉系统标定
针对本文提出的双目定位模型,获取非结构空间点三维坐标取决于系统结构参数以及实际像点与理论折射像点的位置关系,故空间点的三维坐标可归结为矢量函数表达式:
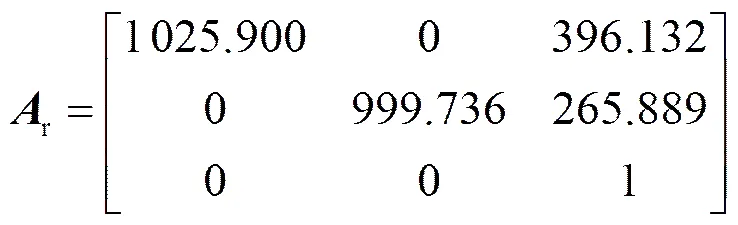
其中系统结构参数主要通过对两摄像机标定求得。为提高水下摄像机的标定精度,本文基于一种改进张氏标定方法[11]来标定系统内外参数。标定时,将标定板在空间中变换多种姿态并采集20组图像,通过标定结果的平均以实现标定误差的降低,利用此方法标定得到的摄像机各参数如下:
摄像机内参数:
,
摄像机畸变参数:


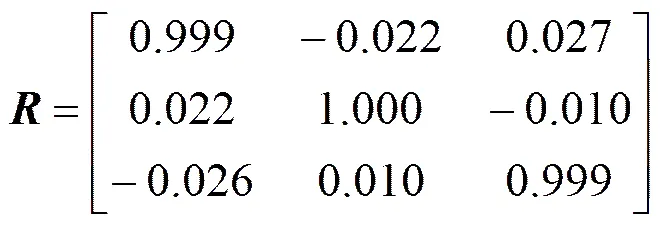
旋转量:
平移量:


3 水下试验及结果分析
3.1 试验设计
为验证模型有效性,本文搭建相应试验平台,将双目摄像机(基于耐辐照摄像机结构特点定制的普通水下摄像机SYSCAM1018)固定安装在相机支架上并校准位置,再整体固定于玻璃箱底部,利用9×7标定板对双目视觉系统当前位置与焦距进行标定,获得两个摄像机的内外参数和镜头畸变参数。其中,玻璃箱为空置和分别加入普通水、2 200 ppm浓度的硼酸水以及8 000 ppm浓度的硼酸水四种状态,比较和分析四种介质中摄像机成像差异和对相同物点的立体定位精度差异,如图2。

图2 水下双目立体视觉系统试验图(a) 主控台;(b) 空气中试验;(c) 普通水中试验;(d) 2 200 ppm硼酸水中试验;(e) 8 000 ppm硼酸水中试验
3.2 结果分析
利用本文算法测量4种工况下目标(12×12棋盘格)上的角点相对于左摄像机坐标系的空间三维坐标,并分别计算长度,其中角点在四种介质中的位置相同,如图3所示。
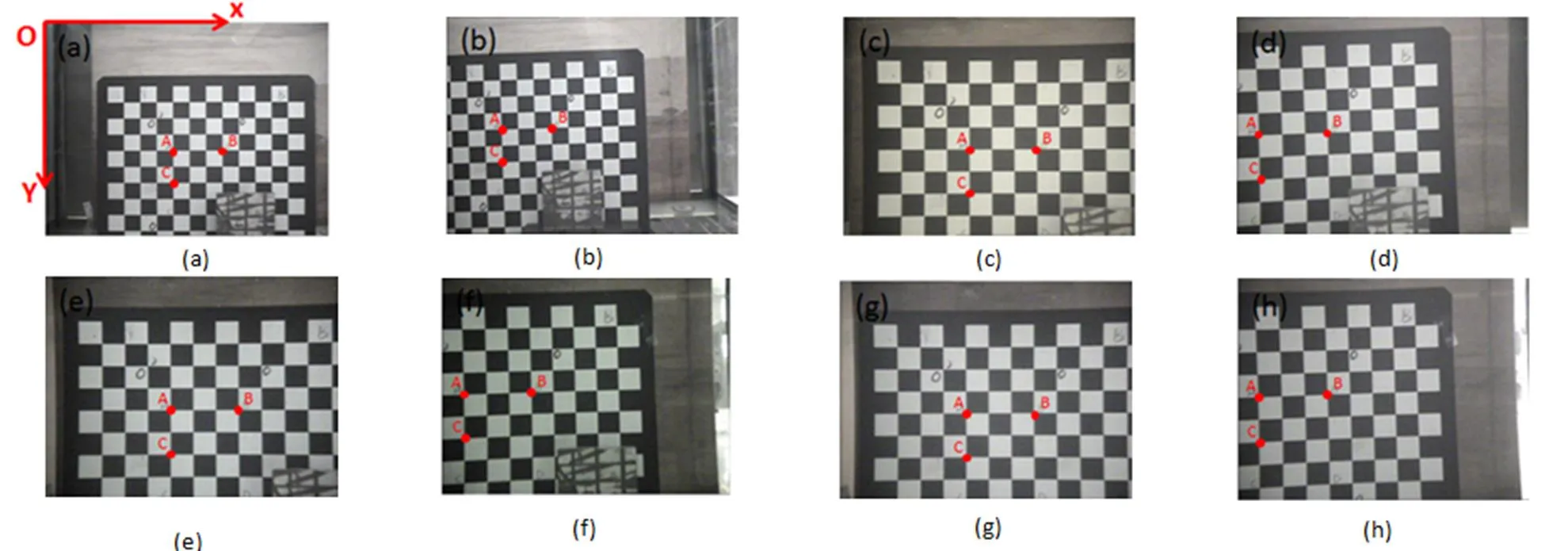
图3 四种工况左右摄像机获取的图像(a) 左摄像机空气中采集的图像;(b) 右摄像机空气中采集的图像;(c) 左摄像机普通水中采集的图像;(d) 右摄像机普通水中采集的图像;(e) 左摄像机2 200 ppm硼酸水中采集的图像;(f) 右摄像机2 200 ppm硼酸水中采集的图像;(g) 左摄像机8 000 ppm硼酸水中采集的图像;(h) 右摄像机8 000 ppm硼酸水中采集的图像
实际物理尺寸=90 mm、=60 mm,试验结果如表1所示。
从表1数据可见,3次测量的各角点三维坐标值以及同一角点在不同介质中三维坐标值不固定,每次测量值都存在一定偏差,主要原因在于系统误差和由人工选点引入的单个角点坐标误差。而计算角点间欧氏距离与理论值相差不大,说明本文方法在mm级精度下的非结构环境中进行目标三维测量是可行的。
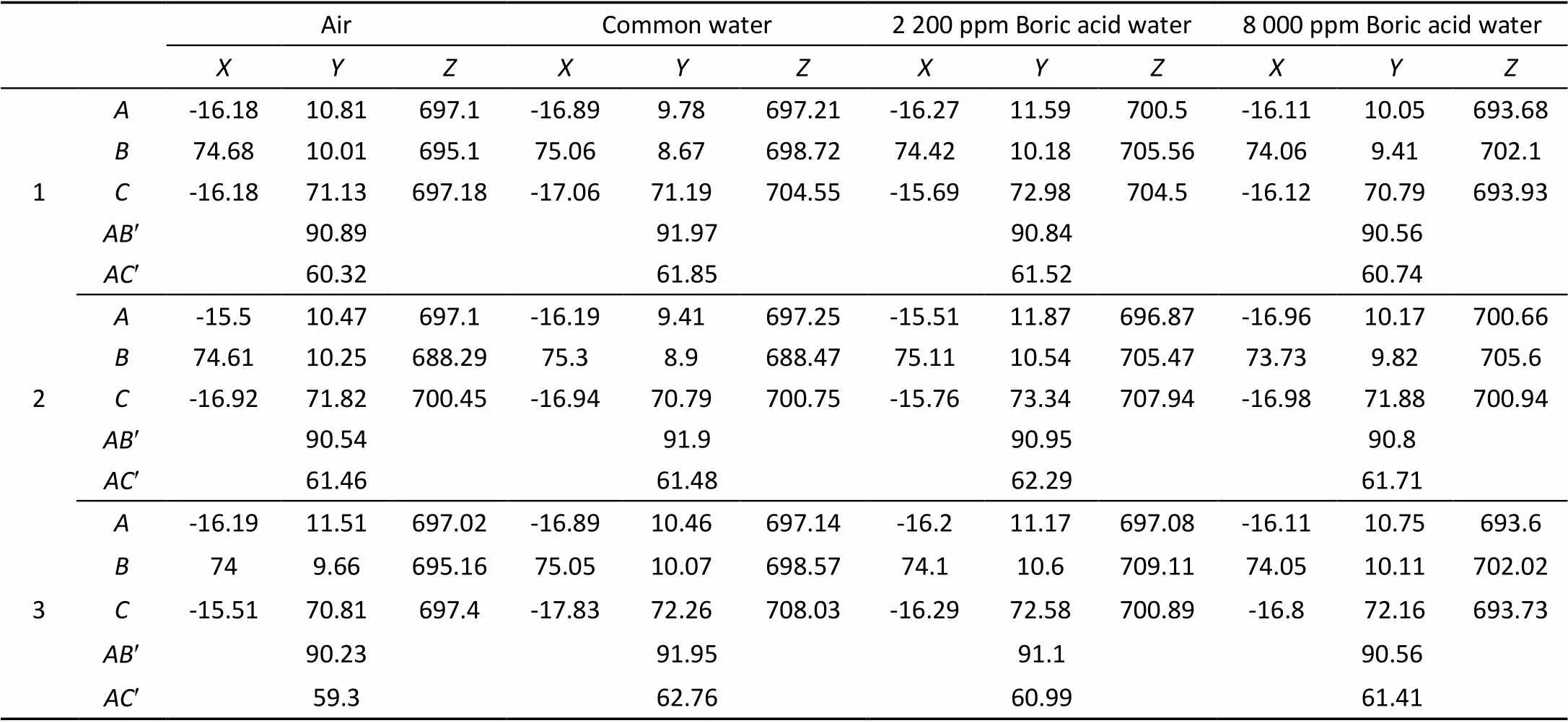
表1 四种工况目标点三维测量试验数据
4 结 论
通过核电特殊水质环境分析,对现有摄像机理想针孔成像模型进行修正,建立非结构环境下水下双目视觉成像模型。提出一种应用于核电特殊水质的双目视觉定位算法,在模拟试验条件下验证模型定位的准确性,并得出不同浓度硼酸对其折射率变化影响较小的结论。实验结果表明,基于本文提出的双目视觉数学模型,在非结构环境下能较准确获取目标物相关尺寸,为核电站水下机器人相关的视觉定位、测量和重建等研究工作提供了一定的技术支持。
[1] Nobuyuki Kita. Visual attention control for nuclear power plant inspection [C]// Proceedings 15th International Conference onPattern Recognition,Barcelona,Sep 03,2000,4:4118-4123.
[2] Yamamoto S. Development of inspection robot for nuclear power plant [C]// IEEE International Conference on Robotics and Automation,Proceedings,Nice,France,May 12,1992,2:1559-1566.
[3] Cho Byunghak,Byun Seunghyun,Shin Changhoon,. Underwater robotic system for visual inspection of nuclear reactor internals [J]. Nuclear Engineering and Design(S0029-5493),2004,231(3):327-335.
[4] Ishibashi S. The stereo vision system for an underwater vehicle [C]// IEEE OCEANS 2009-EUROPE,Charleston,South Carolin, March 17,2009:1-6.
[5] LI Hao,CHEN Yenlun,CHANG Tianhai,. Binocular vision positioning for robot grasping [C]//IEEE International Conference on Robotics and Biomimetics(ROBIO),Thailand,Dec 07,2011:1522-1527.
[6] 刘琼,秦现生,应申舜,等. 双目视觉测量系统结构参数设计及精度分析[J]. 中国机械工程,2008,19(22):2728-2732.
LIU Qiong,QIN Xiansheng,YIN Shenshun,. Structural Parameter Design and Accuracy Analysis of Binocular Vision Measuring System[J].China Mechanical Engineering,2008,19(22):2728-2732.
[7] GUO Yubo,YU Yao. Research on Structural Parameter Optimization of Binocular Vision Measuring System for Parallel Mechanism [C]// Proceedings of IEEE International Conference on Mechatronics and Automation,Bangkok,Thailand,Jun. 5,2006:1131-1136.
[8] 张钧,张宏,刘小茂,等.双目立体视觉中物点定位的一种快速算法[J]. 信息与控制,2009,38(5):563-570.
ZHANG Jun,ZHANG Hong,LIU Xiaomao,. A Fast Algorithm for Locating the Object Point in Binocular Stereo vision [J]. Information and Control,2009,38(5):563-570.
[9] 黄家祥,郁道银,陈晓冬,等.冠状动脉树三维重建方法[J]. 天津大学学报,2004,37(5):386-391.
HUANG Jiaxiang,YU Daoyin,CHEN Xiaodong,. 3D Reconstruction of Coronary Arterial Tree [J]. Journal of Tianjin University,2004,37(5):386-391.
[10] 陈元杰,朱康武,葛耀峥,等.基于双目视觉的水下定位系统[J].机电工程,2011,28(5):567-573.
CHEN Yuanjie,ZHU Kangwu,GE Yaozheng,. Binocular vision based locating system for underwater inspection [J]. Journal of Mechanical & Electrical Engineering,2011,28(5):567-573.
[11] 李光乐,黄文有,刘青松,等.面向水下双目视觉的改进张氏标定方法及实验[J]. 光学学报,2014,34(12):1-12.
LI Guangle,HUANG Wenyou,LIU Qingsong,. Improved Zhang’s Calibration Method and experiments for underwater Binocular Stereo-Vision [J]. Acta Optica Sinica,2014,34(12):1-12.
Research of Underwater Binocular Vision Stereo Positioning Technology in Nuclear Condition
HUANG Wenyou1,2,XU Xiangmin1,WU Fengqi2,WU Yu2,DENG Zhiyan2
( 1. School of Electronic and Information Engineering, South China University of Technology, Guangzhou 510640, China;2.China Nuclear Power Technology Research Institute,Shenzhen 518124,Guangdong,China)
In order to improve the operating and locating accuracy of intelligent equipment under special working environment (high radioactivity, high temperature, high pressure, boric acid and so on) in nuclear power plant. The nonlinear mathematical model of underwater binocular vision is established, considering both refraction effect and lens distortion. To achieve this, it is analyzed that the imaging principle of the boric acid underwater vision as well as the influence factors and presented that a kind of underwater binocular vision positioning method to unstructured environment. In order to verify the method, the comparison experiments are done in the air, common water and different concentrations of boric acid water. The experimental results show that different concentration of boric acid has little influence on the camera imaging refraction, and target attribute dimension calculated is close to actual value.
nuclear power station; boric acid; underwater; binocular vision; stereo positioning
1003-501X(2016)12-0028-06
TP391; TP242
A
10.3969/j.issn.1003-501X.2016.12.005
2016-05-23;
2016-10-22
国家自然科学基金资助项目(61401163)
黄文有(1967-),男(汉族),四川资中人。高级工程师,博士研究生,主要从事核动力设备相关研究。E-mail: huangwenyou@cgnpc.com.cn。
