经纬仪主镜在支撑系统下的面形变化
2017-08-01赵天骄乔彦峰
赵天骄, 乔彦峰, 孙 宁, 谢 军
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049)
经纬仪主镜在支撑系统下的面形变化
赵天骄1,2, 乔彦峰1*, 孙 宁1, 谢 军1,2
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049)
为研究在重力作用下主镜支撑系统对经纬仪主镜处于不同工作角度时面形误差的影响,以600 mm口径主镜为研究对象,利用Abaqus软件分别建立了600 mm主镜在加工状态下和工作状态下的有限元支撑模型,并进行了重力变形分析,然后借助4D干涉仪对在不同支撑系统下的主镜进行相关的面形检测。实验结果表明,在吊带支撑系统和主镜室支撑系统下,主镜的自身面形误差RMS为16.18 nm和16.90 nm。利用有限元分析了理想状态的主镜在不同仰角工况下的面形误差,结合主镜自身的面形误差,计算得到了主镜面形误差在光轴由水平变化到竖直的过程中逐渐变大,其RMS最大为19.58 nm,表明该主镜室支撑系统具有良好支撑效果,可满足工程要求,同时也验证了主镜室支撑系统有限元理论模型的准确性。
光电经纬仪;主反射镜;支撑系统;有限元;面形检测
1 引 言
光电经纬仪是一种典型的光电跟踪测量设备,能够实时准确地测量空中飞行目标的外弹道参数,同时记录其飞行姿态[1],具有抗干扰能力强和测量精度高等优点。主反射镜(主镜)作为光电经纬仪光学系统中的重要部件[2],它的面形精度对成像质量的好坏起着关键性作用。随着对反射镜分辨能力和聚光能力的要求越来越高,不断增大反射镜口径会使其面形精度更容易受到重力和环境温度的影响[3],而合理的支撑结构可以有效减小反射镜在不同工况下的面形变化[4]。近年来,国内诸多学者对大口径主镜的支撑结构展开了研究,戴晓林等[5]对8 m能动薄主镜的侧支撑进行优化设计,借助有限元计算提出了一种比传统的push-pull-sheer支撑方式更简单、效果更好的支撑方案。邵亮等[6]为2 m SiC轻质化主镜设计了液压whiffle-tree被动支撑系统,通过优化分配轴向支撑力提高了主镜的面形精度。伞晓刚等[7]通过对1 m主镜的支撑系统进行优化分析和面形检测,验证了轴向和径向支撑的可行性。李宗轩等[8]对超大口径主镜的关键技术进行了详细介绍,并根据国内技术条件提出了研制3.5 m口径单块式主镜空间望远镜的设想。
对于中小型光电经纬仪而言,主镜的支撑系统在加工和工作时是不同的。如在吊带支撑系统下对600 mm的主镜进行加工,当加工到面形精度的均方根(Root mean square, RMS)小于λ/40(λ为632.8 nm)时,将主镜装配到主镜室支撑系统中。由于两种支撑系统都只能在光轴水平时进行面形检测,所以研究主镜在不同工作角度时的面形精度就显得尤为重要。
本文以某经纬仪中的600 mm主镜为研究对象,根据其工作特点和设计指标要求确定了主镜的支撑方式和支撑点位置,利用Abaqus软件建立主镜及支撑系统的有限元模型,并分别在加工支撑状态和工作支撑状态下对主镜进行重力变形分析,结合面形检测结果计算出主镜在两种支撑状态下的自身面形误差RMS值。最后计算600 mm主镜在实际工作状态下处于不同仰角时的面形误差RMS值,验证了主镜室支撑系统的可行性。
2 主反射镜参数
该主镜的材料为微晶玻璃,材料参数如表1所示。它是通光口径为600 mm的球面反射镜,最大轮廓直径为640 mm,中心孔直径为144 mm,边缘厚度为90 mm,曲率半径为1 350 mm。
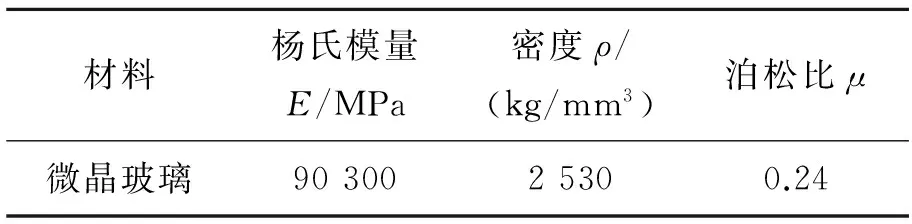
表1 主镜的材料属性Tab. 1 Material parameters of primary mirror
3 吊带支撑系统
对加工状态下的600 mm主镜采用加工大口径反射镜常用的支撑方式——吊带支撑,钢带作为柔性吊带约束反射镜在垂直光轴方向上的位移,包角取170°。图1是利用Abaqus建立的有限元模型,主镜和钢带采用六面体单元划分,共划分45 780个实体单元。对钢带上端的对称固定约束进行分析,在重力作用下主镜的位移变化云图如图2所示。
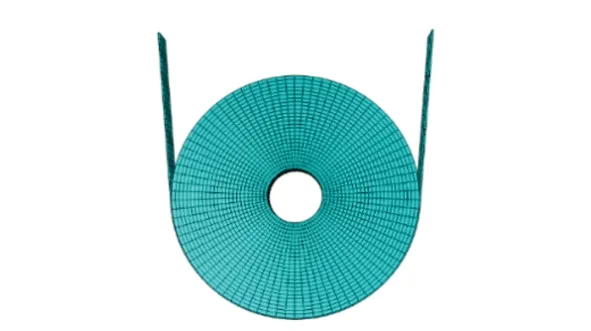
图1 吊带支撑的有限元模型Fig. 1 Finite element model of strip support
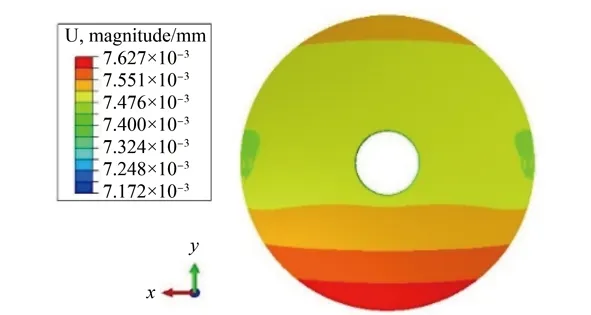
图2 吊带支撑下主镜的位移变化云图Fig. 2 Displacement pattern of primary mirror under strip support
从图2可以看出,从主镜底部边缘到中心孔的过程中,主镜的位移逐渐变小,这是由于主镜边缘与钢带接触,相互作用力较大,导致其比中心位置处的位移大。利用Matlab对分析得到的主镜镜面节点坐标进行Zernike多项式拟合,可算得到主镜的面形误差RMS为2.52 nm。
4 主镜室支撑系统
4.1 支撑方案
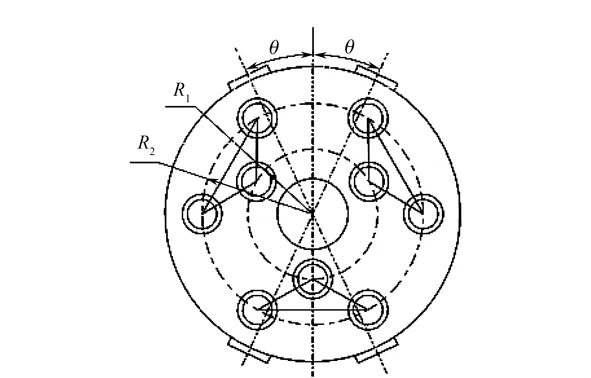
图3 600 mm主镜支撑结构排布方式Fig. 3 Support structure configuration of 600 mm primary mirror
在工作状态下,采用常见的被动支撑方式对主镜的轴向和径向进行定位和支撑[9]。图3是支撑结构排布示意图,底支撑是典型的whiffle-tree浮动支撑形式。利用三点支撑原理,根据主镜的尺寸将支撑点由3点扩展到9点(内环3点,外环6点),每个支撑点为环形支撑垫,他们通过刚性浮动三角支架连接起来,这样的底支撑结构承载能力大,使主镜在轴向上具有良好的稳定性。经过优化后,支撑内环的半径R1=132 mm,支撑外环的半径R2=262 mm[10-11]。将主镜的中心轴定位,通过外边缘重锤平衡杠杆浮动支撑机构实现对主镜的径向支撑。底部两组侧支撑使主镜均匀配重,支撑盘中心线与竖直方向的偏角θ=25°。当主镜处于不同的仰角时,各组侧支撑对主镜的支撑力随光轴角度的变化而自动校正,从而与主镜径向的重力分力平衡[12]。
4.2 有限元模型的建立和分析
由于主镜室的支撑结构较为复杂,先在UG中建立主镜室支撑系统模型,在不影响有限元仿真结果的前提下简化模型,将其导入到Abaqus软件中进行仿真分析。为了保证计算结果的精确度,对导入的模型进行了网格收敛性分析。随着网格密度增加,当支撑结构的刚体位移趋于不变时,说明网格已经收敛[13]。
该支撑系统主要由主镜、轴向支撑、径向支撑、前压紧组件、底板及连接筒组成,有限元模型如图4所示。主镜室支撑结构的材料为铁镍合金4J32。为保证侧支撑盘与主镜之间有效接触,他们之间采用橡胶垫隔开。支撑结构和橡胶垫的材料参数如表2所示。
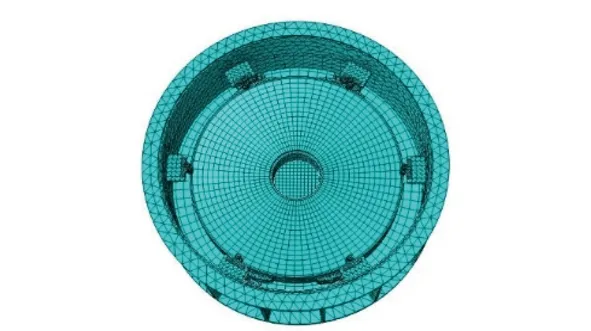
图4 主镜室支撑系统的有限元模型Fig. 4 Finite element model of primary mirror chamber support system
在主镜室的支撑模型中,每个支撑点都与主镜接触,但接触是非线性的,为保证计算收敛,要对接触部分的网格进行细化[14]。主镜背部的环形支撑垫通过钢球和弹簧与三角支撑板相连接,用分布耦合约束代替钢球,弹簧使用弹簧单元。其他部分主要采用六面体单元离散,过渡区域和非分析区域使用四面体单元和楔形体单元离散,共划分184 905个实体单元,最后对主镜及支撑系统施加载荷和约束条件。分析在重力作用下,600 mm主镜在理想状态处于不同工作角度时的镜面变形,图5为光轴水平时主镜的位移变化云图。计算得到了主镜光轴与水平方向的夹角α由0°变化到90°过程中的面形误差变化曲线,如图6所示。当α=0°时,主镜光轴水平,此时主镜的面形误差RMS值最小,为2.99 nm;当α=90°时,主镜光轴竖直,此时主镜的面形误差RMS值最大,为9.44 nm。

表2 铁镍合金4J32和橡胶的材料参数Tab. 2 Material parameters of iron-nickel alloy 4J32 and rubber
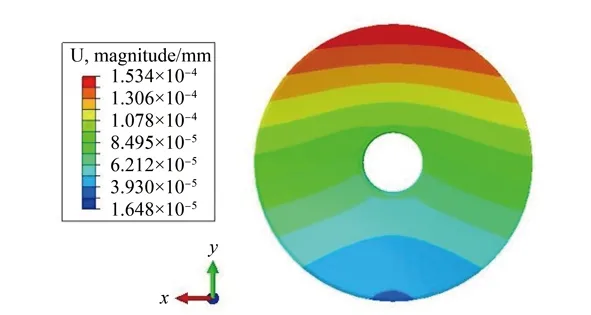
图5 光轴水平时主镜的位移变化云图Fig. 5 Displacement pattern of primary mirror when optical axis is horizontal
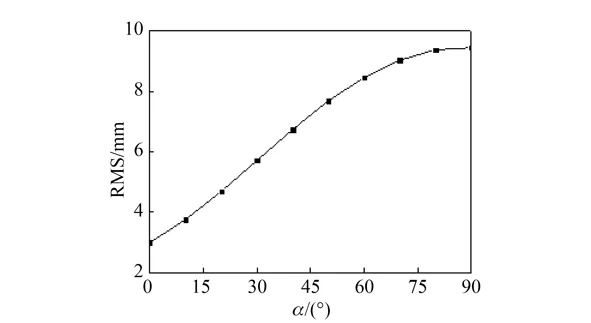
图6 不同仰角下主镜的面形误差RMSFig. 6 Surface deformation error RMS of primary mirror at different elevation angles
5 实验及结果
利用4D干涉仪检测600 mm主镜在上述两种支撑系统下的面形精度误差,在吊带支撑系统下检测到的主镜面形如图7(a)所示,主镜面形误差RMS为17.07 nm。将主镜安装到主镜室支撑系统后检测到的主镜面形如图7(b)所示。由于试验条件的限制,只能检测到光轴处于水平状态时的主镜面形误差,其RMS为17.91 nm。由支撑原理可知,吊带支撑不及主镜室支撑对主镜面形的影响大[15],上述仿真分析结果和检测结果都满足这一规律。
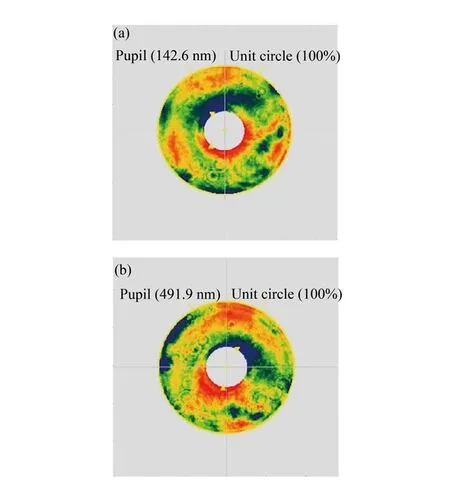
图7 (a)吊带支撑系统下和(b)主镜室支撑系统下检测到的主镜面形Fig. 7 Primary mirror surface tested at (a) strip support system and (b) primary mirror chamber support system
6 主镜面形误差分析
在直角坐标系下的主镜面形误差Zernike拟合多项式:
式中,ai为Zernike多项式中的第i项系数,fi为Zernike多项式中第i项,(x,y)为节点坐标值。这里主要考虑反射镜自身面形误差、重力作用以及支撑系统对主镜面形精度的影响。有限元分析的反射镜为理想镜面,其面形结果只包括自重和支撑系统引起的误差。根据各项误差的不相关性,由面形检测结果Z0与有限元分析结果Z1之间的关系,得到主镜自身加工面形误差的Zernike拟合多项式:

式中,bi为面形检测Zernike多项式中的第i项系数,ci为有限元分析Zernike多项式的第i项系数。
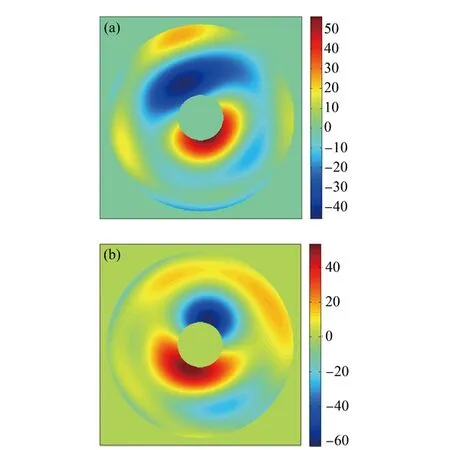
图8 主镜在(a)吊带支撑系统和(b)主镜室支撑系统下的自身面形云图Fig. 8 Surface deformation pattern of primary mirror at (a) strip support system and (b) mirror chamber support system
这样就得到了表示主镜自身面形精度的Zernike系数,提取前36项系数进行Zernike多项式拟合,就可以计算出600 mm主镜在吊带支撑系统和主镜室支撑系统下的自身面形误差RMS分别为16.18 nm和16.90 nm,两者的RMS值相差4.35%,主镜面形云图如图8(a)和(b)所示。主镜在从吊带支撑系统装配到主镜室支撑系统过程中,因为转动使其径向位置相对发生改变。但从图中可以看出,主镜在两种支撑系统下对应位置的自身面形变形程度基本一致,表明通过上述方法得到的结果能够真实地反映主镜镜面的自身面形误差,并验证了主镜室支撑系统有限元模型的准确性。将前面有限元分析的600 mm主镜在不同仰角下的面形误差,与主镜在主镜室支撑系统下获得的自身面形误差结合起来进行Zernike多项式拟合,得到了反映主反射镜在实际工作状态下的面形精度,如图9所示。可见,面形误差RMS随着主镜仰角α的增大而逐渐增大,当主镜光轴指向天顶时,其面形误差达到最大,面形误差RMS为19.58 nm,小于λ/30(λ=632.8 nm),说明在实际工作状态下该主镜室支撑系统引起的主镜面形误差满足工程要求。另外,与图6理想状态下的主镜面形误差曲线相比,图9中的主镜面形误差变化范围明显减小,这说明主镜自身面形误差对实际工作状态下的面形误差有较大影响。

图9 主镜在实际工作状态下的面形误差RMSFig. 9 Surface deformation error RMS of primary mirror in working state
7 结 论
借助吊带支撑系统对600 mm主反射镜进行加工,之后将其装配到主镜室支撑系统中。主镜室支撑系统由9点whiffle-tree浮动轴向支撑结构(内环3点,外环6点)和4组重锤平衡杠杆径向支撑机构组成。经有限元分析得到了理想主镜光轴水平时在吊带支撑系统和主镜室支撑系统下的面形误差RMS分别为2.52 nm 和2.99 nm。利用4D干涉仪检测得到了主镜在加工状态下的面形误差RMS为17.07nm,放到主镜室中其RMS为17.91 nm。最后分离出主镜在这两种支撑系统下的镜面自身面形精度RMS分别为16.18 nm和16.90 nm;同时,主镜在两种支撑系统下对应位置的自身面形变形程度基本一致,说明计算结果可靠,证明了建立的600 mm主镜室支撑系统模型的准确性。主镜光轴在由水平变化到竖直过程中,主镜在实际工作状态下的面形精度RMS最大为19.58 nm(光轴竖直),可满足工程要求,验证了该主镜室支撑系统具有良好的支撑效果。
[1] 赵学颜,李迎春. 靶场光学测量[D]. 北京:装备指挥技术学院,2001. ZHAO X Y,LI Y CH. Range optical measurement[D]. Beijing:TheAcademyofEquipmentCommand&Technology,2001. (in Chinese)
[2] 马品仲. 大型天文望远镜设计和研究[J]. 应用光学,1994,15(3):6-11. MA P ZH. Design and study on the large astronomical telescope[J].AppliedOptics,1994,15(3):6-11. (in Chinese)
[3] 杨佳林,黄巧文. 大口径反射镜结构参数优化设计[J]. 中国空间科学技术,2011(4):77-33. YANG J L,HUANG Q W. Optimized design of structure parameters for large aperture mirrors [J].ChineseSpaceScienceandTechnology,2001(4):77-83. (in Chinese)
[4] 李福,阮萍,赵葆常. 重力作用下平面反射镜变形研究[J]. 光子学报,2005,34(2):272-275. LI F,RUAN P,ZHAO B CH. Study on the surface deformation of flat reflector under gravity load[J].ActaPhotonicaSinica,2005,34(2):272-275. (in Chinese)
[5] 戴晓霖,鲜浩,唐金龙,等. 8 m能动薄主镜侧支撑设计[J]. 光学学报,2015,35(6):255-262. DAI X L,XIAN H,TANG J L,etal.. Designing of lateral support system for an 8 m active thin mirror[J].ActaOpticalSinica,2015,35(6):255-262. (in Chinese)
[6] 邵亮,吴小霞,杨飞,等. SiC轻量化主镜液压whiffletree支撑系统的改进[J]. 红外与激光工程,2014,43(11):3820-3824. SHAO L,WU X X,YANG F,etal.. Improvement on hydraulic whiffletree support system for SiC lightweight primary mirror[J].Infrared&LaserEngineering,2014,43(11):3820-3824. (in Chinese)
[7] 伞晓刚,孙宁,卓仁善,等. 大口径光电经纬仪主反射镜支撑结构设计[J]. 光学 精密工程,2013,21(12):3111-3117. SAN X G,SUN N,ZHUO R SH,etal.. Design of supporting structure for primary mirror of large aperture theodolite[J].OpticsandPrecisionEngineering,2013,21(12):3111-3117. (in Chinese)
[8] 李宗轩,金光,张雷,等. 3.5 m口径空间望远镜单块式主镜技术展望[J]. 中国光学,2014,7(4):532-541. LI Z X,JIN G,ZHANG L,etal.. Overview and outlook of monolithic primary mirror of spaceborne telescope with 3.5 m aperture[J].ChineseOptics,2014,7(4):532-541. (in Chinese)
[9] 张景旭. 地基大口径望远镜系统结构技术综述[J]. 中国光学,2012,5(4):327-336. ZHANG J X. Overview of structure technologies of large aperture ground-based telescopes[J].ChineseOptics,2012,5(4):327-336. (in Chinese)
[10] 吴小霞,杨洪波,张景旭,等. 大口径球面镜支撑系统的优化设计[J]. 光子学报,2009,38(1):129-132. WU X X,YANG H B,ZHANG J X,etal.. Optimal design of support system for the large-aperture sphere mirror[J].ActaPhotonicaSinica,2009,38(1):129-132. (in Chinese)
[11] 王富国,杨洪波,杨飞,等. 大口径主镜轴向支撑点位置优化分析[J]. 红外与激光工程,2007,36(6):877-880. WANG F G,Yang H B,YANG F,etal.. Optimization and analysis for the axis support points position of the large aperture mirrors[J].Infrared&LaserEngineering,2007,36(6):877-880. (in Chinese)
[12] 范李立,张景旭,姜皓,等. 极轴式望远镜主镜支撑设计[J]. 红外与激光工程,2011,40(3):476-479. FAN L,ZHANG J X,JIANG H,etal.. Design of the primary mirror support of equatorial telescope[J].Infrared&LaserEngineering,2011,40(3):476-479. (in Chinese)
[13] 庄茁,由小川,廖剑晖,等. 基于ABAQUS的有限元分析和应用[M]. 北京:清华大学出版社,2011. ZHUANG ZH,YOU X CH,LIAO J H,etal..BasedonABAQUSfiniteelementanalysisandapplication[M]. Beijing:Tsinghua Unversity Press,2011. (in Chinese)
[14] 谢军,曹立华,韩光宇,等. 考虑接触边界条件的经纬仪主镜面形误差分析[J]. 光子学报,2014,43(12):1212004. XIE J,CAO L H,HAN G Y,etal.. The surface error analysis of theodolite primary mirror considering boundary condition[J].ActaPhotonicaSinica,2014,43(12):1212004. (in Chinese)
[15] 邵亮,吴小霞,陈宝刚,等. SiC轻量化主镜的被动支撑系统[J]. 光学 精密工程,2015,23(5):1380-1386. SHAO L,WU X X,CHEN B G,etal.. Passive support system of light-weighted SiC primary mirror[J].OpticsandPrecisionEngineering,2015,23(5):1380-1386. (in Chinese)
Surface deformation of theodolite primary mirrorunder the support system
ZHAO Tian-jiao1,2, QIAO Yan-feng1*, SUN Ning1, XIE Jun1,2
(1.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033 China;2.University of Chinese Academy of Sciences,Beijing 100049,China)*Corresponding author, E-mail:qiaoyf@ciomp.ac.cn
In order to study the effect of support system on surface deformation error of theodolite primary mirror at different working angles under gravity, the 600 mm primary mirror finite element support models in processing state and working state are built using Abaqus software, and the gravity deformation analysis of the primary mirror is also carried out. Then, the related surface deformation tests of the primary mirror at different support systems are carried out using 4D interferometer. As a result, the surface deformation errors RMS of the primary mirror at strip support system and mirror room support system are 16.18 nm and 16.90 nm, respectively. The surface deformation errors of ideal primary mirror in varied elevation angles are analyzed by the finite element method. Combining with the surface deformation error in itself, it is found that the surface deformation error of the primary mirror increases gradually in the process of the optical axis changing from horizontal direction to vertical direction, and the maximum RMS is 19.58 nm. This shows the primary mirror chamber support system has an excellent supporting performance and can satisfy the engineering requirements. It is also verified that the finite element theoretical model of the primary mirror chamber support system is accurate.
photoelectric theodolite;primary mirror;support system;finite element;surface deformation test
2017-02-20;
2017-04-03
国家自然科学基金项目(No.51275504) Supported by National Natural Science Foundation of China (No. 51275504)
2095-1531(2017)04-0477-07
TH743
A
10.3788/CO.20171004. 0477

赵天骄(1991—),女,吉林长春人,硕士研究生,主要从事主镜支撑系统设计与仿真分析的研究。E-mail: zhaotjhit@163.com

乔彦峰(1962—),男,吉林长春人,研究员,博士生导师,主要从事光电测量方面的研究。E-mail: qiaoyf@ciomp.ac.cn