基于大圆航线的飞行动态信息三维可视化
2017-01-13苏志刚1王广超1郝敬堂2
苏志刚1,2,王广超1,郝敬堂2
(1.中国民航大学天津市智能信号与图像处理重点实验室,天津 300300;2.中国民航大学中欧航空工程师学院,天津 300300)
基于大圆航线的飞行动态信息三维可视化
苏志刚1,2,王广超1,郝敬堂2
(1.中国民航大学天津市智能信号与图像处理重点实验室,天津 300300;2.中国民航大学中欧航空工程师学院,天津 300300)
针对飞行监视信息可视化问题,在大圆航线上,结合所需性能导航(RNP)与广播式自动相关监视(ADS-B)技术,分析了航空器信息与RNP保护区计算方法;利用三维地理信息系统World Wind Java的二次开发功能,提出了基于航迹运行模式的航空器动态信息与保护区可视化方法;在本地高分辨率地理环境下重点实现4D航迹模拟飞行、保护区设计、飞行标牌和地形剖面测量等功能;最后通过仿真分析,表明该方法能够直观准确地完成可视化仿真,可应用于飞行监视与规划。
三维可视化;大圆航线;飞行信息;保护区;地理信息系统
0 引言
航空运输业的迅速发展,使空域拥挤的问题日益突出,当前的空中交通管理模式已难以满足未来航空发展的需要[1]。对于空中交通密集的空域,使用飞行与空管调配结合的空管方式逐渐显示其落后性。为进一步提高空域的利用率,美国、欧洲相继推出并积极实施新一代空中交通管理系统,致力于实现空中交通安全、经济和高效的动态一体化管理,其核心是基于航迹的空域运行;将空中交通管理的运行模式转换到基于航空器的航迹运行模式上来,在高密度空域把航迹作为基本运行机制之一[2 3]。所需性能导航(required navigation performance,RNP)和广播式自动相关监视系统 (automatic dependent surveillance-broadcast,ADS-B)[3]成为关键技术。
基于三维地理信息系统的空管信息验证和仿真,以其可视化手段和逼真的效果,为实现高效、经济、安全的空中交通管理提供有力支持[4-5]。三维地理信息系统也逐渐成为基于航迹运行和空域规划的运行模式的实现平台[6 7],使得对空中交通管理的整体把握成为可能。
本文在大圆航线模型下,通过NASAWorld Wind源码的二次开发,结合RNP飞行设计实现了三维环境下航空器信息、保护区信息、高分辨率地理环境等三维可视化动态仿真,为空中监视、空中交通管理和航线规划等提供参考。
1 航空器信息
航空器的动态信息是空中交通管理系统中的核心信息,对于飞行冲突预测、航线规划、飞行仿真、空中事故调查等方面具有重要意义。ADS-B技术通过数据链向外广播航空器的状态信息,增强了对目标的实时监控能力[8]。
1.1 4D航迹与飞行姿态
ADS-B广播信息中包括ICAO地址(航空器标识)、接收时间(信息接收并解码后的时间)、航班号、当前飞行状态(三维位置、地速、爬升速度、偏向角等)、紧急状态等信息[9]。因此由ADS-B信息即可获取航空器的四维航迹信息与即时姿态信息,实现即时监控。具体信息如表1所示。
1.2 飞行标牌
航空器信息通过飞行标牌直观标注,以提供航空器的状态信息和简单告警等功能。目前空管系统中飞行标牌格式没有统一的标准。《MH/T 4012-2001空中交通管制雷达标牌》标准定义了雷达显示屏上航班位置标记、空管标牌格式等内容,具有较好的参考价值。考虑到本文使用的ADS-B数据内容相对较少且与空管雷达的数据有所不同,故依据ADS-B数据内容并参照雷达系统标牌的格式,设计如图1所示标牌格式。

表1 ADS-B飞行信息结构体格式
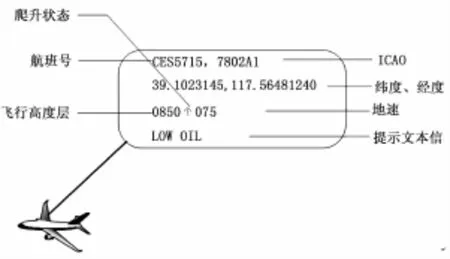
图1 航班标牌的设计格式
2 基于RNP的保护区设计
RNP定义为:飞机在确定航线、空域或区域内运行时所需要的导航性能精度,以保证航空器完成要求的飞行操作。基于RNP技术的飞行程序设计使机场终端区的运行更加精确、安全、高效。为开发RNP技术的最大潜能,FAA提出了要求授权的RNP程序(RNP/AR)[10]。RNP/AR定义为最后进近RNP值在0.3至0.1(含)之间,对于流量大、地形复杂的机场大大节省了空域,提高了运行效率。
RNP飞行程序中主要有两种航段类型:直线到定位点(Track to Fix,TF)航段和半径到定位点 (Radius to Fix,RF)航段。RNP航段应使用最适合的航段类型(TF或RF)来设计,以满足在各航段的超障和运行要求。一般来说,优先考虑TF航段。连接两个TF航段的旁切航路点转弯的保护区设计准则如图2所示。

图2 在旁切定位点的转弯保护区设计
当障碍物妨碍使用旁切转弯时,可使用RF航段改变飞行航迹或用于满足其它运行要求。RF航段提供一个可重复的、地面航迹固定的转弯。RF航段保护区设计准则如图3所示。保护区的具体参数计算参见文献[10]。

图3 RF转弯保护区
3 基于大圆航线的计算
地球表面任意两个坐标点沿球面连线的最短路径是一条以地球球心为圆心的圆弧,即为大圆(Great Circle)路径。沿大圆航线飞行可以缩短飞行距离,节省运营成本[11]。地理坐标系中,航空器的航线和保护区设计的相关计算无法直接进行,一般做法是通过坐标转换将地理坐标系转换为直角坐标系,但是在转换过程中会造成较大误差[12]。为减小误差,本文采用基于大圆航线的计算方法。
假设p1(φ1,λ1)为航空器所处位置,p2(φ2,λ2)为待飞航路点(φ表示纬度,λ表示经度,文中角度与长度单位均为弧度)。在不考虑高度信息的情况下[13 14]:
1)两航路点p 1 p2之间的大圆路径长度c[15](单位弧度,下同)。

式中,Δφ=φ2-φ1,Δλ=λ2-λ1,下同。由式(1)即可求得路径长度c。
2)大圆航线的航向角。点p1(φ1,λ1),p2(φ2,λ2)构成航线的航向角Az为:

3)由点p1(φ1,λ1)沿航向角Az移动Δσ距离到达的位置为p(φ,λ):

4)两大圆航线交叉点坐标。两条航线端点为p1(φ1,λ1),p2(φ2,λ2)和p3(φ3,λ3),p4(φ4,λ4),对于每一个点,定义由地心指向该点的单位向量:

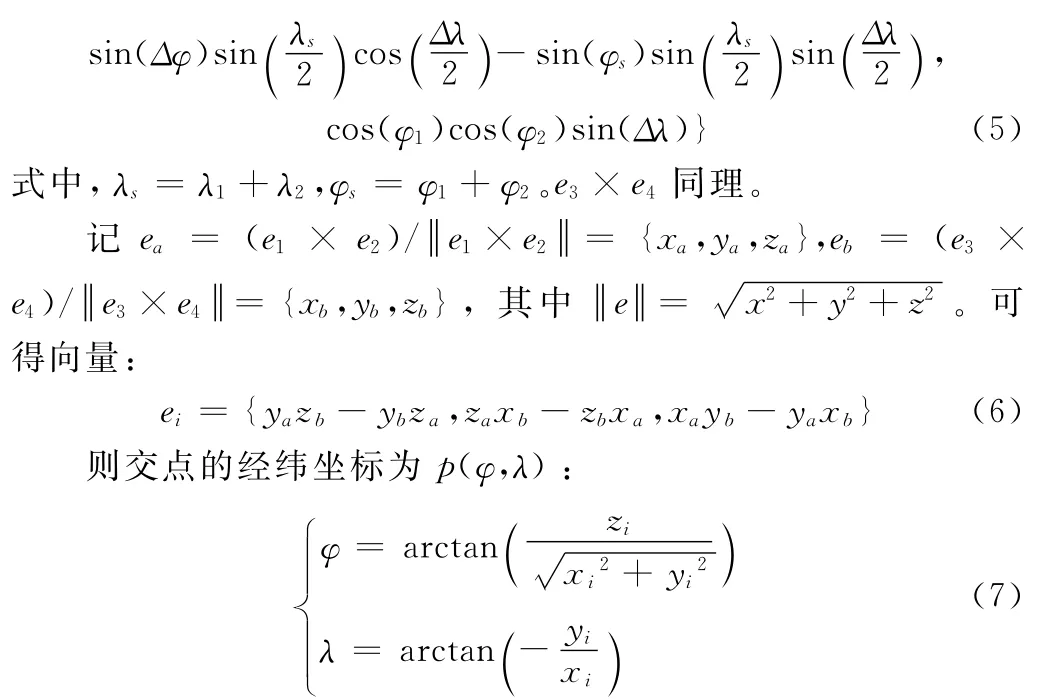
依据上述计算原则即可完成航线与保护区的相关计算。
4 可视化显示的设计与仿真
4.1 实现方案
本文以三维地理信息系统World Wind Java为基础,通过二次开发实现航空器飞行信息的三维可视化,实现功能主要有:加载区域高清地图影像与高程数据,在接收并处理ADS -B数据后实现航空器的姿态、航迹、飞行标牌的动态模拟,规划航线、估计航迹等可视化展现,RNP保护区的计算与三维仿真,飞行轨迹的下海拔测量等功能。

图4 方案结构图
NASAWorld Wind,是由美国国家航空航天局(NASA)开发的开源三维地图平台,具有良好的框架设计和几乎无限的数据扩充能力[15-16]。WorldWind可以灵活的加载地图图像,其主要通过XML配置文件将图像和高程信息瓦片引入World Wind程序中进行渲染。本地图像和高程信息加载后效果如图5所示(京津地区)。

图5 京津地区高清地图影像与高程数据加载效果
World Wind Java是典型的C/S体系应用系统,可以为Java Application提供具有交互操作能力三维地理信息的组件集合,用于Swing等组件。WorldWind Java组件是可扩展的,其API主要通过接口方式进行定义,其中5个最重要的接口:Globe接口:表现行星球体和地形;Layer接口:球体上影像图层或数据图层;Model接口:聚合Globe和Layer,用于创建星球模型;SceneController接口:控制Model的渲染,用于表现时间、时间等;View接口:控制Model的用户视图。在典型的应用中,程序在一个Model对象中关联一个Globe对象和多个Layer对象,然后将Model传给SceneController对象,用于在一个World Window中显示globe和layers。SceneController对象控制globe和layers的显示,并与View接口互动来决定用户视图。
本文的三维仿真主要是基于Layers接口进行,主要利用World Wind Java中关于图层的layers包。高清地图影像和高程数据、航空器信息、空域信息等的三维仿真就是以不同的图层接口的形式渲染出来的。主要有Basic TiledImageLayer图像图层、AirspaceLayer三维形体图层、TerrainProfileLayer地形剖面图层、RenderableLayer图层及 Annotation Layer标注图层等。
在获得ADS-B数据以及航线信息后,通过Renderable-Layer图层绘制航迹、规划航线、估计航迹等;航空器三维模型通过.dae加载文件实现,在提取航空器姿态信息后设置模型的姿态参数,使之准确反映航空器的即时姿态;结合航段数据设计并计算保护区三维坐标范围,进而通过AirspaceLayer图层进行绘制渲染;通过航迹点位置的投影测量获得对应位置的海拔高度,并通过TerrainProfileLayer渲染。航空器运行过程中渲染画面随着信息的实时刷新而刷新。
4.2 仿真分析
本文的仿真区域位于京津地区,所用数据为ADS-B实际接收数据。
图6(a)、(b)是系统界面效果图,系统功能包括保护区仿真,航空器位置展示,航线可视化等功能,具体展示内容包括飞行姿态、飞行标牌、规划航线、估计航迹,飞行轨迹地表投影、地形剖面等。画面每1秒刷新一次,各航空器以独立的线程运行。

图6 仿真结果
图6(c)中可以看到飞行轨迹和对应的地表投影线,飞行标牌显示当前飞机的状态、身份、提示等信息,航空器模型使用.dae文件进行模拟。左下角窗口为实时飞行轨迹下的地形变化情况,可放大显示,为航空器运行提供参考。图6(d)显示了航空器在RNP保护区中运行的状况,小球为规划航路点,对应实线为规划航线,虚线为航空器的估计飞行轨迹。为了便于观察,将图中的保护区尺度做了放大处理。
5 结论
相对于等角航线而言,大圆航线保证了飞行距离的最短,节省燃油成本,提高运行效率。本文在此基础上研究了飞行状态信息、航线数据和基于RNP的飞行保护区相关计算方法,并在World Wind的基础上结合三维地形数据与高分辨率卫星地图,进行飞行状况、姿态信息、保护区、地形剖面等内容的动态仿真。系统整体效果良好,能够方便直观地呈现飞行的实时状态,对整个运行过程实施监控。基于三维地理信息系统的多样信息展示,使相关信息一目了然;其基于航迹运行的模式,有利于对空中交通管理的整体把握。
[1]吕小平.中国民航新一代空中交通管理系统发展总体框架[J].中国民用航空,2007,80(8):24-26.
[2]Harry S,Richard B,Michael L.Next generation air transportation system(NGATS)air traffic management(ATM)airspace Project [R].Washington,NASA,2006:1-44.
[3]Olaf D,Thorsten A,Cristiano B,et al.SESAR D3 ATMTarget Concept[R].Montreal,EUROCONTROL,2007:1-94.
[4]刘 洁,李 宏.基于三维GIS的新疆空管系统的设计实现[J].地理空间信息,2012,10(4):86-88.
[5]高永芹,曹志勇,陈 晨,等.基于Web GIS优化技术的评估研究 [J].计算机测量与控制,2014,22(12):4009-4049.
[6]沈笑云,赵 瑞,焦卫东,等.基于World Wind的RNP飞行程序三维可视化仿真[J].系统仿真学报,2012,24(10):2131 -2135.
[7]Paul W.Determination and visualization of Uncertainties in 4D-Trajectory prediction[J].Luftverkehrssysteme,2013,5(5):1-9.
[8]邵 帅.ADS-B航迹处理及显示技术研究[D].哈尔滨:哈尔滨工业大学,2013.
[9]王 强,施 红,胡明朗.基于ADS-B飞行安全实时监控及半物理测试平台[J].计算机测量与控制,2015,23(1):27-30.
[10]Order 8260.52,United States Standard for Required Navigation Performance(RNP)Approach Procedures with Special Aircraft and Aircrew Authorization Required(SAAAR)[S].U.S.Department of Transportation FAA,2005.6.
[11]郑亚波,郭海亮,李 伟.基于三维GIS平台的大圆航线三维可视化[J].指挥控制与仿真,2015,12,37(6):127-132.
[12]袁修孝,张雪萍,付建红.高斯-克吕格投影坐标系下POS角元素的转换方法[J].测绘学报,2011,40(3):338-344.
[13]Snyder J P.Map Projections-A working mannual,professional paper 1395[R].Reston,Virginia:U.S.Geological Survey,1987:29-31.
[14]Williams.Aviation Formulary V1.46[EB/OL].[2015-7-9].http://williams.best.vwh.net/avform.htm.
[15]David G B,Frank K,Chris M,et al.NASAWorld Wind:Opensource GIS for Mission Operations[A].Aerospace Conference,2007,IEEE[C].2007:1-9.
[16]周 玲,高严铭,王海红,等.World Wind Java三维地理信息系统开发指南[M].北京:机械工业出版社,2013.
3D Visualization of Dynamic Flight Information Based on Great Circle Route
Su Zhigang1,2,Wang Guangchao1,Hao Jingtang2
(1.Tianjin Key Lab for Advanced Signal Processing,Civil Aviation University of China,Tianjin 300300,China;2.Sino-European Institute of Aviation Engineering,Civil Aviation University of China,Tianjin 300300,China)
To implement the visualization of flight surveillance information,the flight information and calculation of protection zone were researched combined with the Required Navigation Performance(RNP)and Automatic Dependent Surveillance-Broadcast(ADS-B)based on great circle route.Using the customization functions of World Wind Java,the 3D visualization method of dynamic flight information based on trajectory operation and air route protection zone was proposed.Functions were implemented in local high-resolution terrain scene include flight simulation based on 4D trajectory,air route protection zone and flight labels visualization,elevation measurement,etc.The simulation results were given to demonstrate that the 3D visualization is satisfactory and can be applied to flight surveillance and programming.
3D visualization;great circle route;flight information;protection zone;geographic information system
1671-4598(2016)08-0233-03
10.16526/j.cnki.11-4762/tp.2016.08.064
:TP391.9
:A
2016-02-19;
:2016-03-08。
中央高校科技基本科研业务费中国民航大学专项项目(3122016H006)。
苏志刚(1972-),男,黑龙江尚志人,教授,博士后,主要从事谱估计、自适应信号处理、阵列信号处理、数据融合等方向的研究。
