基于Agent的多无人机协同飞行通信技术研究
2017-01-13洋1陈雪峰2田雪涛1
刘 洋1,陈雪峰2,田雪涛1
(1.西安爱生技术集团公司,西安 710065;2.西安航空电子科技有限公司,西安 710065)
基于Agent的多无人机协同飞行通信技术研究
刘 洋1,陈雪峰2,田雪涛1
(1.西安爱生技术集团公司,西安 710065;2.西安航空电子科技有限公司,西安 710065)
从Agent的两大优良特性--自主性和协同性出发,研究了在多无人机协同飞行中,采用多Agent思想的协同飞行通信技术;根据多无人机协同飞行的特点,设计了多Agent协同飞行的通信协议,多Agent间传递的信息以及信息的分享模式,分析了MAS间信息传递过程;最后,通过实例介绍和分析MAS协调通讯的构建形式,实现了多无人机协同目标定位中的数据通信;实际飞行实验结果证明,该通信机制能够控制多架无人机同时飞行,提高了通信效率,验证了该方法的可行性和有效性。
无人机;多Agent系统;协同飞行;数据通讯
0 引言
Agent[1]即自治智能体,它的最大特点是自主性与协同性,将Agent技术用于多无人机[2-4]协同飞行,以满足系统的自主性、信息分布性和响应实时性的要求。多无人机协同A-gent体系,不仅将单个无人机看做是一个Agent,同时扩展到计算机系统、机器或软件中的一段程序,以此组建成了多A-gent系统MAS(Muliti-Agent Systems);在MAS中,每个Agent只具有完成任务所需的不完整的任务或者能力,只能根据所具有的局部信息以及相互之间的通信来进行决策。当MAS组成编队[5]飞行时,其编队的决策可由地面协同决策A-gent与机上协同决策共同Agent完成。由于MAS中不同A-gent的不同职责,系统自然形成了编队协调、航线生成、飞行控制层次分明的分层递阶结构。本文将研究基于多Agent的无人机协同飞行通讯问题。
1 通信结构及原理
由图1可知,Agent属于相同或不同的类型,它们在系统结构中担任着不同的角色,它们间的协作必须考虑信息的存储方式、共享方式和通信方式,所以体系结构中必须有共同的通信协议和信息传递机制。
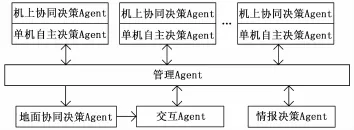
图1 无人机协同Agent结构
MAS间决策变量及影响决策的状态向量是MAS通信的主要内容,也是构成MAS通信协议的元素。通信与编队指挥构型直接相关,由上述可控且可观测的无人机间MAS指控的基本构型,可组成实际飞行中的多无人机[6]间的编队指控形式,如图2所示。主要形式如下:
1)协同飞行时可将状态数据汇集至地面控制站完成协同指控;
2)从每个群的成员中选取一架无人机作为该群的群主,群内的协同指挥由群主实施,群内的无人机之间可以进行信息交互;
3)群主负责将群内各无人机的状态转发给地面控制站,地面站对群的指控都需经群主完成,群主同时也转发回协同目标定位任务数据。
根据表1所列给出的最小交互信息约定,可以统计得到:无人机间单次传递协同信息不少于22字节,其中状态参量不少于16字节,指令参量不少于6字节,此字节数中均不含冗余字节数和指令回报字节。
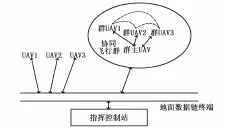
图2 基于MAS的多无人机指控示意图
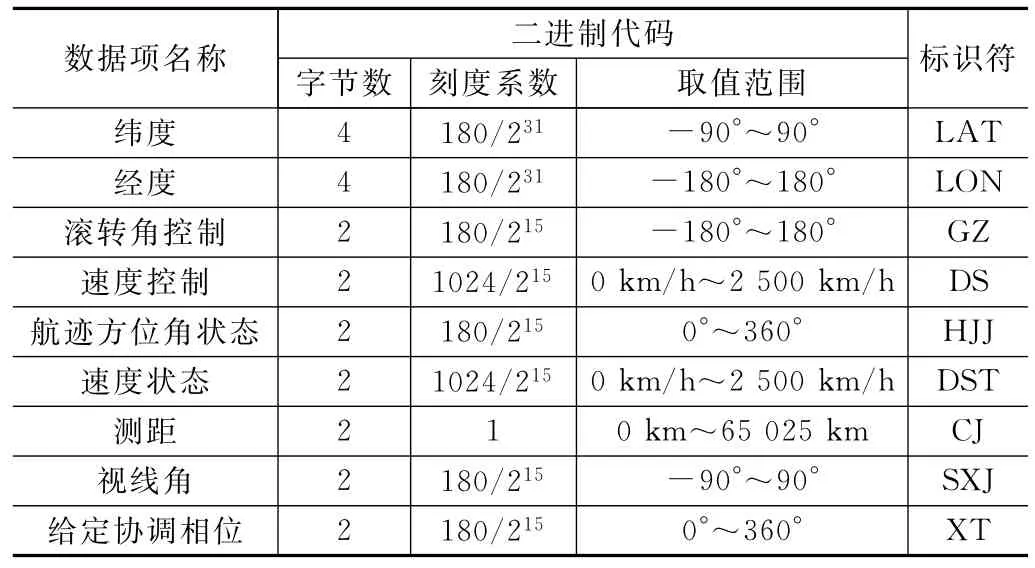
表_1 协_同飞行中的信息约定
根据这一特性,定义MAS中,由地面控制站和群主机发出的指令参量数据流为遥控数据,采用码分方式对各MAS进行协调。由各无人机发送的反映各自状态参量的数据流为遥测数据,靠频分的方式共享给其他MAS成员。
2 MAS信息分享设计
MAS中信息分享采用黑板模型结构。黑板模型结构的核心主要负责:对知识源进行集中和分配,对黑板上的信息进行更新,负责通知知识源读取黑板上的信息。黑板模型具有层次性、内在并行性等优点,能够实现异构知识源的集成,可以实现MAS指控的并发控制、交互控制和实时控制。
1)实时信息的分享:对本机MAS和他机MAS传来的状态及指令信息进行分享。依照黑板模型,所有实时信息参数数据都以公共变量形式存储,系统采用统一的时间20 ms周期中断更新数据。各MAS调用所需数据均从公共变量中直接摘取,如图3所示。
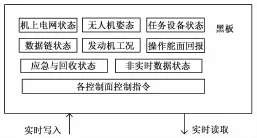
图3 实时信息的传递
2)非实时信息的分享:非实时信息的内容主要为GPS、北斗和无线电辅助导航的定位信息。非实时信息不存放于公共变量中,而存放于开辟的缓存中,并不断由新信息推入,将老信息推出。接口程序不断将接收到的GPS数据和北斗数据累积到缓存中,自主决策Agent读取GPS或北斗数据,当读取指针追上写指针时,触发GPS或北斗定位故障判断,判断GPS或北斗的写指针与上一周期中的写指针是否发生了变化,若GPS写指针持续20秒或北斗写指针持续60秒未发生变化,自主决策Agent则判断相应的卫星定位设备发生故障,切换到其它导航定位方式,将信息分享到黑板,非实时信息的分享流程如图4所示。
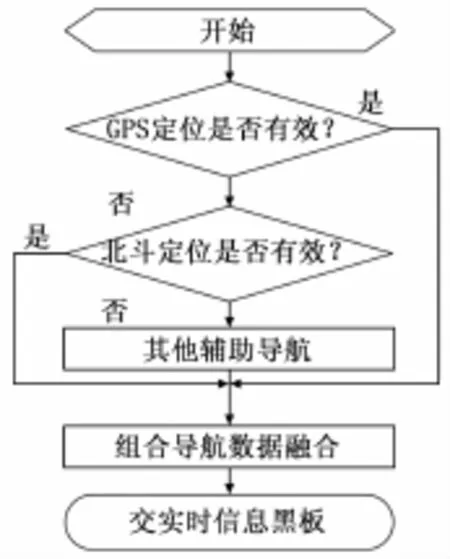
图4 非实时信息分享
3 MAS间信息传递过程
MAS中,管理Agent接收到遥测数据后,直接将原始数据存储,并对各飞机状态参数及相关任务设备参数进行解码,并按机号编组为数据包后通过广播模式发送到地面指控站的以太网上。各交互Agent可选择单个或多个机号的无人机参数在相关的数据显示设备查看。交互Agent通过各自的操纵台控制器,选择欲控制的无人机机号,按要求编码通过以太网(或者串口)向管理Agent发送飞行控制指令、任务规划指令等。管理Agent再将控制指令数据组帧通过串口发送给数据链,并由其转发给机群内各MAS。情报决策Agent也通过发布在以太网内的遥测数据融合包收集并处理来自机上任务设备上的各参数,同时形成任务规划决策,并通过协同决策Agent发送给交互Agent,随即上传到各无人机。群内群主的协同决策Agent同时也能发出遥控指令,群成员协同决策Agent收到指令及需交互协同的其他无人机的状态信息,交由自主决策Agent做自身动作,完成协同任务,如图5所示。
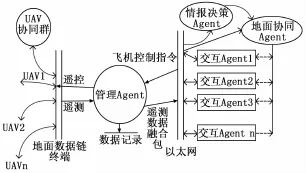
图5 MAS的数据流向图
4 MAS协调通讯实例
MAS中,某型多无人机系统将协同决策Agent和单机自主决策Agent编写在机载计算机的导航程序中,以分层递阶的控制结构,实现协同协调、航线生成、控制指令输出的能力。同时,单机自主决策Agent自身也是分层递阶的Agent混合体,其组织级管理自主飞行与人工控制之间的模式切换与衔接,生成预装订任务航线的实时再规划预案;其协调级对飞行状态、导航设备状态、动力系统实时监视与决策,并通过机载传感器获取飞机状态和环境改变信息,向组织级提供实时再规划与调整的策略;执行层对可执行的航线策略输出飞机可执行的控制指令,其控制指令包括对动力系统的控制指令、导航控制指令、任务设备控制指令等。机上协同决策Agent可直接与自主决策Agent的组织级和协调级对话,完成协同决策任务。同样,单机自主决策Agent也能与发动机智能控制模块同级之间对话,也可直接与对应级的上级对话,确保发动机动作执行处于最优先位置,从而保证飞行的基本安全。图6所示为无人机Agent协调通讯图。
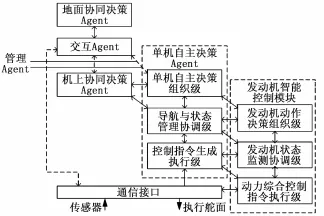
图6 无人机Agent协调通讯图
5 实验结果与分析
结合XXX型多无人机系统,利用该MAS通信技术同时控制四架无人机,飞行实验为三次,最长单次飞行时间为10小时。在保证飞机基本安全的条件下,按照计划顺利地完成了作战任务,同时验证了该多无人机协同飞行通信技术的可行性和有效性。
6 结论
本文介绍了基于Agent多无人机协调飞行中的通信技术,分析了多无人机协同飞行中的信息交互方式和信息量,设计了信息通信的数据结构,进而设计了基于黑板模型结构的MAS信息分享机制,保证了本机Agent信息的快速分享,在无人机间采用交互Agent进行MAS间信息传递。最后结合某型多无人机系统介绍了MAS协调通讯构建形式,实飞实验结果证明,该通信机制能够控制多架无人机同时飞行,提高了通信效率,验证了该方法的可行性和有效性。
[1]曹菊红,高晓光.多架无人机协同作战智能指挥控制系统[J].火力与指挥控制,2003,28(5):22-24.
[2]吴汉平,等译.无人机系统导论[M].第2版.北京:电子工业出版社,2003.
[3]沈林成,牛轶峰,朱华勇.多无人机自主协同控制理论与方法[M].北京:国防工业出版社,2013.
[4]陈 瑛,刘 丽,曾勇虎.美军未来无人机系统发展的关键技术[J].飞航导弹,2010(7):33-37.
[5]樊琼剑,杨 忠,方 挺,等.多无人机协同编队飞行控制的研究现状[J].航空学报,2009,30(4):683-691.
[6]胡 军,张新建.多无人机测控系统研究[J].现代电子,2000 (2):9-13.
Research on Communication Technology of Multi-UAVs Coordinated Flight Based on Agent
Liu Yang1,Chen Xuefeng2,Tian Xuetao1
(1.Xi′an ASN Technology Group Co.,Ltd,Xi′an 710065,China;
2.Xi′an Avionics Technology Co.,Ltd,Xi′an 710065,China)
From two good qualities of the Agent-autonomy and collaborative,the coordination of multi-Agent thought flying communication technologies are researched in multi-UAV coordinated flight.Based on the characteristics of multi-UAV coordinated flight,the communication protocols of multi-Agent coordinated flight,information transmission between multi-Agent and information share model are designed.The process of information transmission between MASis analyzed.Finally,this paper introduces and analyzes building form of MAS coordination communication through an example,and the data communication for multi-UAV coordinated target position is realized.Actual flight experiment results show that the communication mechanism can control multi-UAV flying at the same time,improve the communication efficiency,proves the feasibility and validity of the method.
UAV;multi-agent system;coordinated flight;data communication
1671-4598(2016)08-0301-03
10.16526/j.cnki.11-4762/tp.2016.08.082
:TP182
:A
2016-03-30;
:2016-04-07。
国家自然科学基金(61074155)。
刘 洋(1980-),女,陕西乾县人,硕士,高级工程师,主要从事导航、制导与地面指挥控制方向的研究。
