基于扩展卡尔曼滤波器的PMSM无传感器矢量控制仿真设计
2017-01-11周双飞黄海波简炜
周双飞,黄海波,简炜
(湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002)
基于扩展卡尔曼滤波器的PMSM无传感器矢量控制仿真设计
周双飞,黄海波,简炜
(湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002)
提出了一种基于扩展卡尔曼滤波器(EKF)的PMSM转子速度和位置的估算方法。利用α-β坐标系下的电机状态方程,进行EKF算法的实现,并在Matlab/Simulink平台设计仿真模型并进行仿真验证,经过仿真表明基于EKF的PMSM无位置传感器矢量控制系统具有较高的估计精度、良好的动态性能和稳态性能,且鲁棒性较好。
永磁同步电机;无速度传感器;扩展卡尔曼滤波器
近年来矢量控制在永磁同步电机控制系统中得到广泛应用,为了获得高动态响应、高精度调速、和高效率等控制特性,需要得到准确的永磁同步电机转子转速和位置反馈信息。目前PMSM位置和速度信息主要通过光电编码器或旋转变压器等传感器获得,国内编码器与国外相比仍然存在一定差距[1]。传感器的安装不仅增加了永磁同步电机成本,还使其在恶劣环境下的应用受到限制,因此无位置传感器控制技术受到越来越多的关注。
目前永磁同步电机无位置传感器矢量控制方法主要有模型参考自适应法、Luenberger观测器、滑模观测器、扩展卡尔曼滤波器[2-3]等。扩展卡尔曼滤波器不仅适合于求解永磁同步电机的非线性方程,且对噪声有滤波作用,具有良好的动态特性和抗干扰能力,即使在静止状态下依然可以很好地观测[4]。本文中采用基于扩展卡尔曼滤波器的永磁同步电机无传感器矢量控制算法,为了提高实用性,对EKF算法进行了简化,并在Simulink中搭建了仿真模型,验证了该算法的优越性。
1 矢量控制
矢量控制的基本思想是在交流电机上模拟直流电机的控制方法,通过将电机的定子电流从三相静止坐标系变换到以转子磁链定向的同步旋转坐标系,实现励磁电流和转矩电流的解耦,使其彼此独立且相互垂直,因此可以对其进行独立控制。为此建立如图1所示的矢量坐标系,其中三相静止ab-c坐标系,在空间上呈120°均匀分布,与PMSM三相绕组对应;静止α-β坐标系的α轴与a轴重合,β轴超前α轴90°;旋转d-q坐标系在空间上随转子同步旋转,d轴方向与磁场方向一致,d轴与α轴夹角为θ。可得三相静止坐标系到两相静止坐标系的变换(clark变换)矩阵:
两相静止坐标系到旋转坐标系的变换(park变换)矩阵:
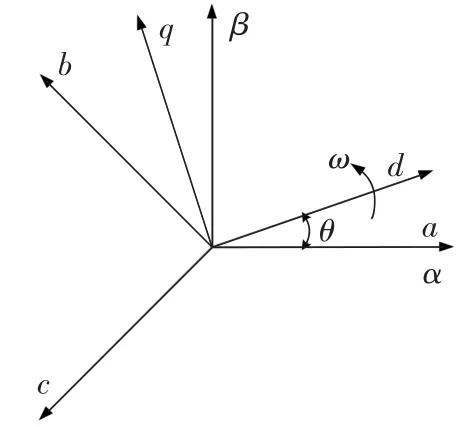
图1 矢量变换坐标系
2 永磁同步电机EKF矢量控制系统
基于扩展卡尔曼滤波器的永磁同步电机无位置传感器矢量控制系统的框图如图2所示,为了提高控制精度,采用速度环外环和电流环内环的双闭环控制系统。其中速度内环的电流反馈信号通过clark变换和park变换得到,坐标变换所需要的转子位置信号和速度外环的速度反馈信号由EKF观测得到。电机的转子位置和速度信息在两相静止α-β坐标系下进行观测,取clark变换后的电流作为EKF的输入电流信号,测量反park变换后的电压作为EKF所需要的控制信号,其中逆变器通过电压空间矢量脉宽调制(SVPWM)产生所需要的控制信号,控制电机的运行状态。
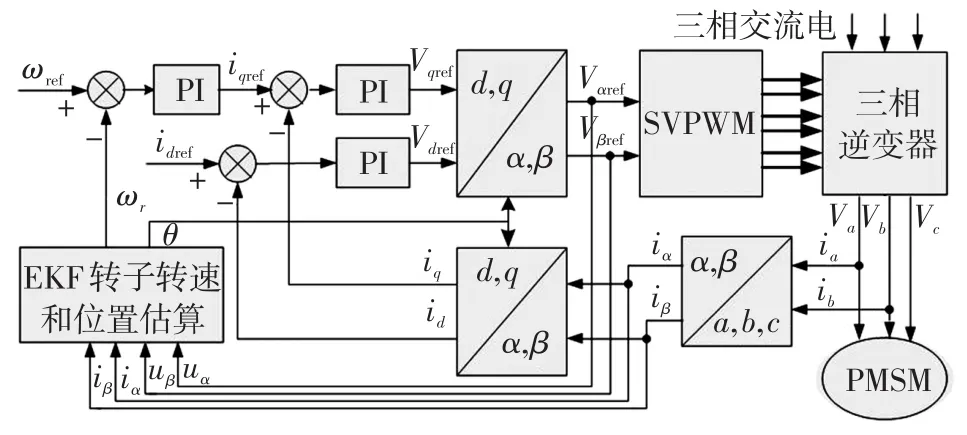
图2 EKF无传感器控制系统整体框图
3 扩展卡尔曼滤波器设计
扩展卡尔曼滤波器对噪声有良好的滤波作用,且算法是递推结构,用前一次的估计值和本次相关数据来估计信号的当前值,滤波器增益能够适应环境而自动调节,所以EKF就是一个自适应系统[5]。
在静止α-β坐标系下的电机状态方程为
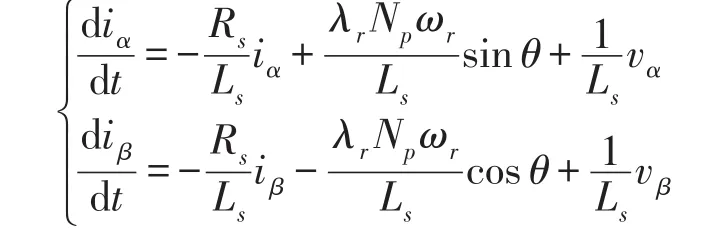
式中:Rs为电机定子相电阻;Ls为电机定子相电感;iα,iβ,vα,vβ为定子两相静止坐标系定子绕组电流和电压;λr为转子永磁体磁链;ωr为转子速度;Np为电机的极对数。
根据电机的状态方程建立α-β坐标系下的数学模型:
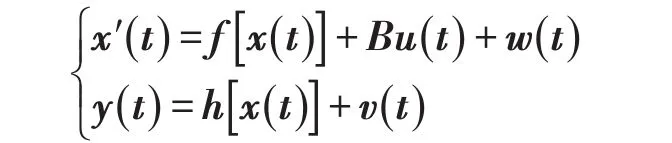
电机的状态方程是非线性的,为了得到系统状态的EKF估计算法,对f(x)和h(x)进行线性化处理,为构建扩展卡尔曼滤波器数字化系统,还需进行离散化,设采样时间为Ts,离散化的系统方程为

首先对电机各状态进行一步预测:

计算本次预测误差的协方差:

其次计算滤波增益:

对电机的状态进行最优估计:

更新滤波协方差方程:

式中:Qk-1为过程噪声wk-1的协方差;Rk为测量噪声vk的协方差。Q和R的各元素为常数,Q和R影响EKF的收敛性和估计精度,其值的大小通过反复试凑的方式确定。
4 系统仿真模型的设计与分析
为了验证该控制系统的性能,在Matlab/Simu⁃ link平台搭建基于EKF的无速度传感器矢量控制系统的仿真模型,如图3所示,以电流为内环速度为外环的双闭环控制系统,电源模块、IGBT模块及PMSM模块直接采用Simulink提供的模型,其中永磁同步电机的额定电压U为440 V、相电阻R为2.875 Ω、相电感Ld为0.008 5 H、永磁体磁链ψr为0.175、转动惯量J为0.0008kg·m2、极对数为4。
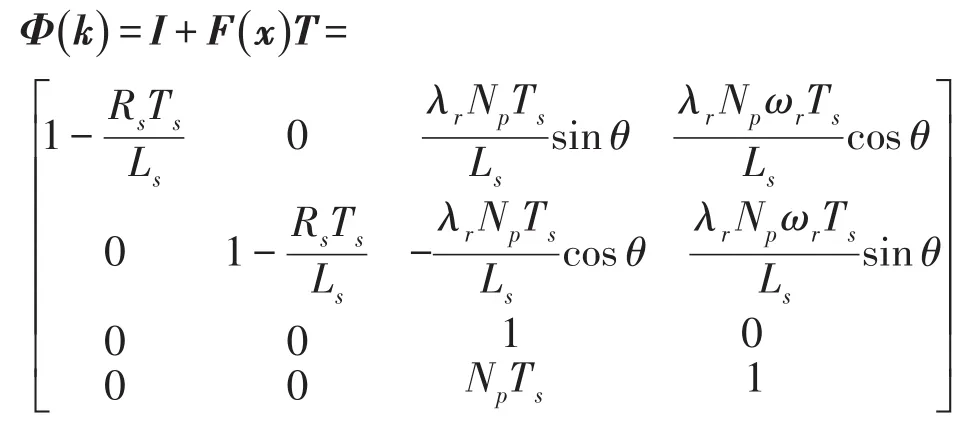
EKF的采样时间对系统的控制精度有重要影响,采样时间越短控制精度越高,同时也会导致仿真速度明显降低,此处设EKF的采样时间T为1× 10-6s。EKF模块内部结构如图4所示,Subsystem1中的数学表达式为
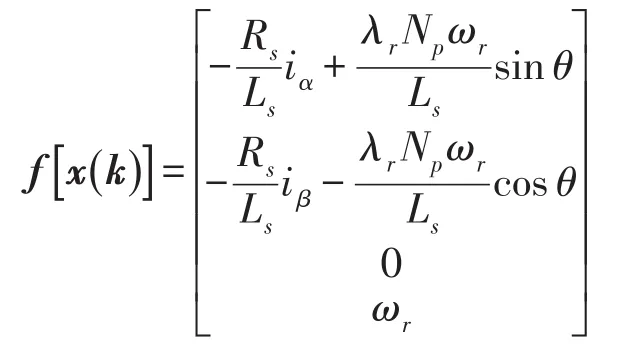
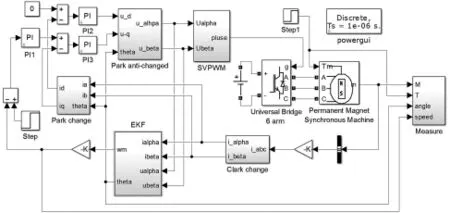
图3 系统仿真模型
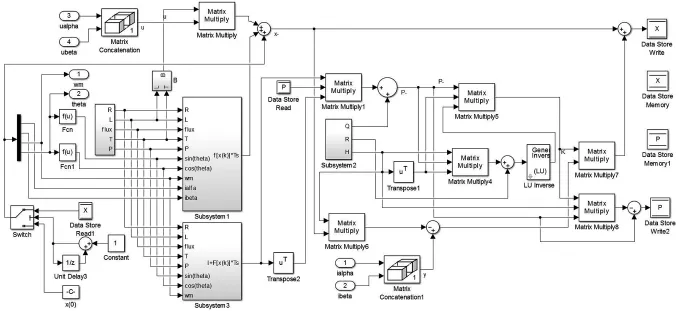
图4 EKF模块内部结构图
Subsystem3的输出数学表达式为
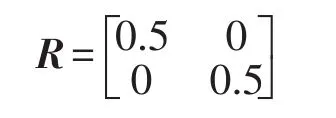
Subsystem2中Q和R的选择直接影响系统的收敛性和估计精度,通过大量试验发现R值的大小对系统的影响相对较小,选择测量噪声的协方差为
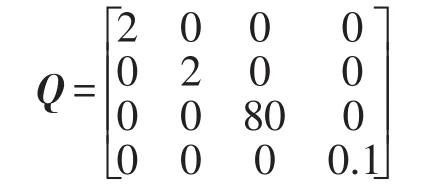
试验发现:Q大小的确定,不仅要考虑其内部各值的大小,还应综合考虑双闭环系统各PI调节器其值的大小。由α-β坐标系下的电机状态方程可知,要估计得到转速和位置角首先要对电流进行准确估计,故前期调试采用转速和位置角的测量值代替估计值组成闭环控制,试凑得到电流iα、iβ的协方差和各PI调节器的初值,后期调试用转速和位置角的估计值组成闭环控制,反复试凑得到ωr、θ的协方差,最后对Q和PI调节器的各值进行微调,由此得到过程噪声的协方差为
根据阅读文献一般状态变量的初始值x(0)设为0,在试验过程中发现电机经常出现反转现象,调试发现设置不同的初始值可以明显减少这种状况的发生,本系统选择x(0)=[0.01 0.01 0-π/2]T有效遏制了永磁同步电机反转现象的发生。
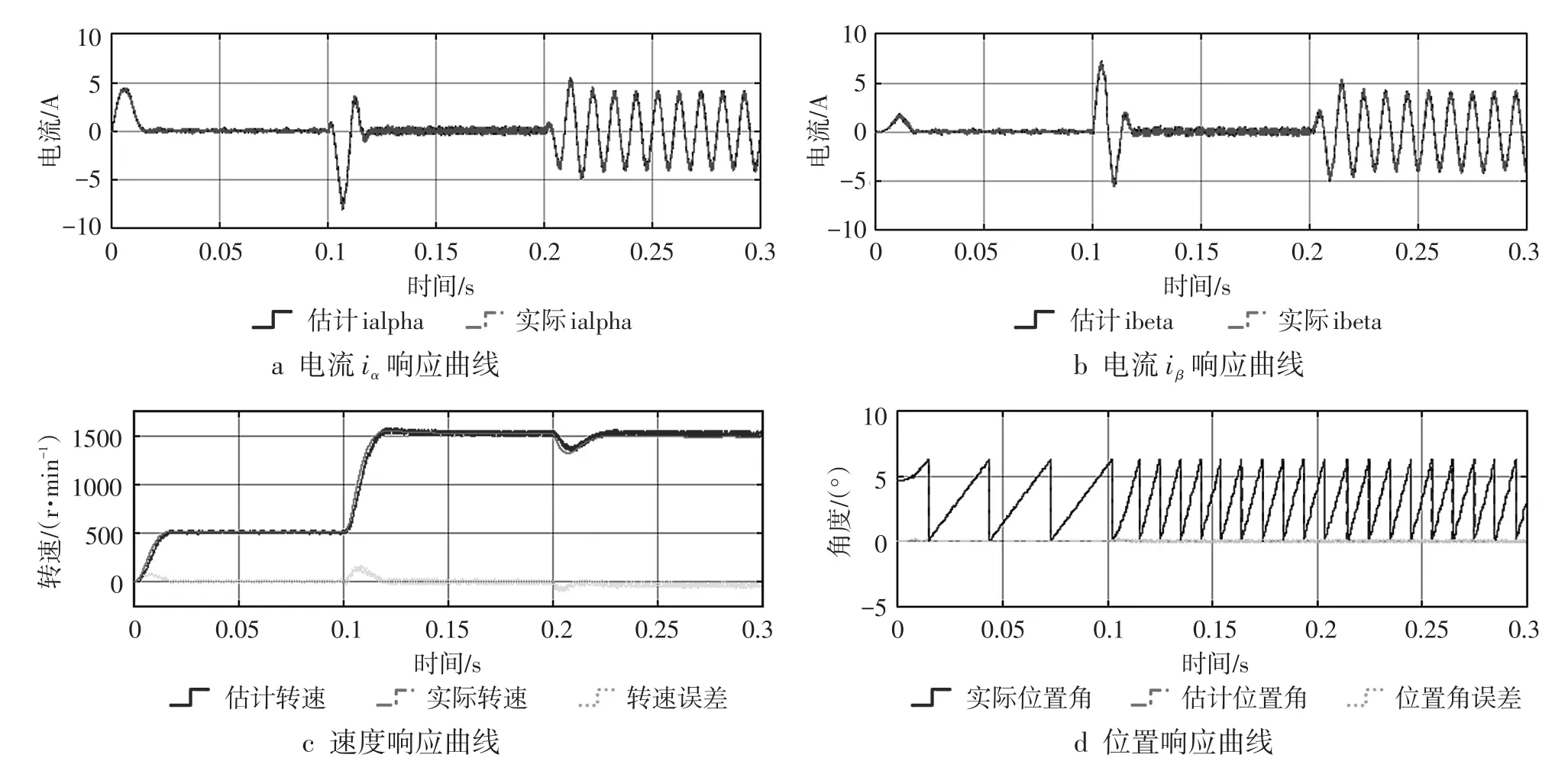
图5 速度突变及突加负载过程中电流、速度和位置响应曲线
为验证EKF的稳态性能和动态性能,给定转速500 r·min-1,空载启动,0.1 s时目标转速升至1 500r·min-1,并在0.2s时突加4N·m负载。图5a~b为电流跟踪曲线,电机在启动、变速的过程中电流出现较大波动,电流估计值仍可以快速跟踪实际值,在加载后得到较好的正弦波电流且估计值十分接近真实值,效果比较好。图5 c为速度变化曲线,可以看出电机启动时可以迅速达到目标转速,大约在0.02 s时进入稳定状态,启动过程比较稳定且没有超调,在0.1 s速度发生较大变化时仍然能较快的跟踪实际转速,并且在高速时负载发生变化速度依然可以迅速稳定;从转速误差曲线可以看出,电机在低速和高速运转情况下,进入稳态后估计值在实际值附近小幅度波动,速度跟踪效果较好。图5 d为转子位置波形图,结果表明电机在低速和高速运转时转子位置角估计比较准确,没有明显误差。
实验发现EKF算法中Q值和R值的确定非常麻烦,由此希望EKF算法有较强的通用性,故对其进行鲁棒性实验,将电机相电阻扩大为原来的3倍,其他电机参数不变,做同样的变速加载试验。图6 a为速度变化曲线,速度在达到目标转速之前有些超调,超调量不大,速度误差依然很小,速度跟踪效果较好。从图6 b可以看出:估计和实测的转子位置角曲线几乎重合,位置角估计较准确,EKF具有较强的鲁棒性。
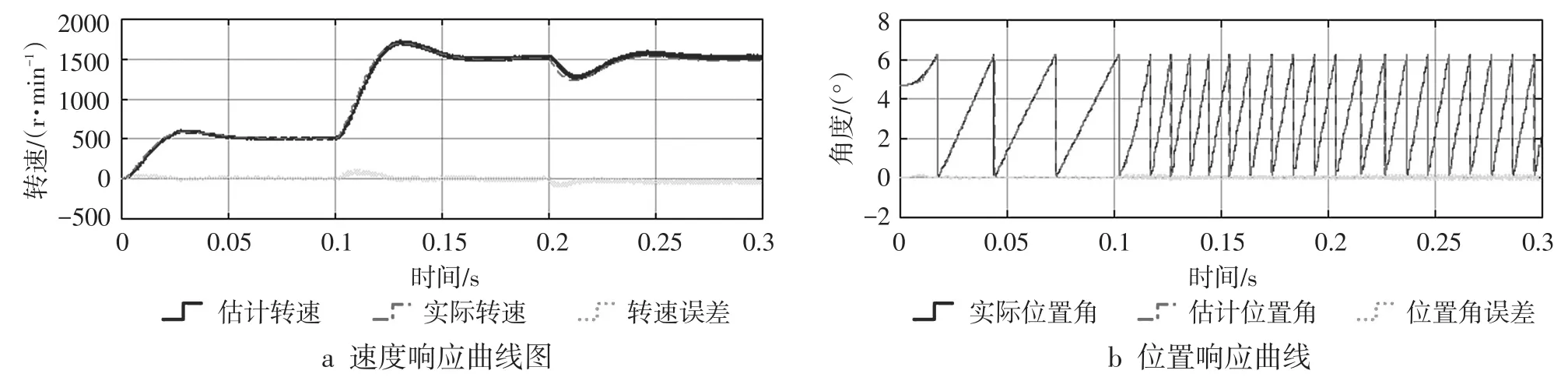
图6 电阻扩大3倍速度和位置响应曲线
5 结语
基于永磁同步电机传统传感器控制的一些弊端,提出了一种基于扩展卡尔曼滤波器的无传感器控制的算法,并对算法的递推过程进行了详细分析。该算法复杂、计算量大,通过仿真实验分析发现:扩展卡尔曼滤波器具有较好的噪声滤波效果,提高了PMSM控制系统的控制效果,具有较好的动静态特性且鲁棒性较好。
[1]杨国良,李建雄.永磁同步电机控制技术[M].北京:知识产权出版社,2015,6,3-6.
[2]L C Zai,C L DeMacro,T A Lipo.An Extended KalmanFil⁃ter Approach to Rotor Time Constant Measurement in PWM InductionMotor Drives[J].IEEE Transaction on In⁃dustry Applications,1992,28(1):96-104.
[3]François Auger,Mickael Hilairet,Josep Guerrero.Indus⁃trial Applications of the Kalman Filter:A Review[J]. IEEE Transactions on Industrial Electronics,2013,60(12):5458-5471.
[4]K L Shi,Y K Wong,S L Ho.Speed Estimation of an In⁃duction Motor Drive Using an Optimized Extended Kalman Filter[J].IEEE Transactions on Industrial Electronics, 2002,49(1):124-133.
[5]王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2014:209-216.
[6]许文杰,杨勇波,荣秀婷.扩展卡尔曼滤波法在12相发电机定子参数辨识中的应用[J].湖北汽车工业学院学报,2009(3):27-31.
Simulation of PMSM Sensorless Vector Control Based on Extended Kalman Filter
Zhou Shuangfei,Huang Haibo,Jian Wei
(School of Electrical&Information Engineering,Hubei University of Automotive Technology,Shiyan 442002,China)
A method of PMSM rotor speed and position estimation based on extended Kalman filter(EKF)was put forward.The EKF algorithm was realized by using the state equation of the motor in the alpha-beta reference frame,and the simulation model was designed and simulated in the Matlab/Simu⁃link platform.The simulation results show that the PMSM sensorless vector control system based on EKF has high estimation accuracy,good steady-state and dynamical properties and better robustness.
PMSM;sensorless control;extended Kalman filter
TM341
:A
:1008-5483(2016)04-0028-05
10.3969/j.issn.1008-5483.2016.04.007
2016-06-18
湖北省科技支撑计划项目(2015BAA049);湖北省自然科学基金项目(2014CFB378);
湖北省教育厅科学研究计划项目(D20131802);智能驾驶控制湖北省重点实验室(筹)开放基金项目(ZDK2201402)
周双飞(1990-),男,山东聊城人,硕士生,从事节能与新能源汽车方面的研究。E-mail:759841391@qq.com
