基于某越野车型四轮转向的最优控制建模与仿真
2017-01-11王思文冯樱刘惊涛
王思文,冯樱,刘惊涛
(湖北汽车工业学院 汽车工程学院,湖北 十堰 442002)
基于某越野车型四轮转向的最优控制建模与仿真
王思文,冯樱,刘惊涛
(湖北汽车工业学院 汽车工程学院,湖北 十堰 442002)
通过建立三自由度4WS模型,采用最优控制理论求得最优控制Kalman增益。利用Matlab/Simulink软件搭建整车模型。选取不同车速工况下的角阶跃前轮大转角,对采用不同控制策略的三自由度4WS模型与理想模型进行仿真对比分析。仿真结果表明:与基于前馈控制策略的三自由度4WS模型和三自由度2WS模型相比,基于最优控制策略的三自由度4WS模型在质心侧偏角和横摆角速度上更加接近于理想模型。最优控制策略可以适用于汽车的四轮转向系统,并能改善对理想模型的跟踪能力,提高汽车的操纵稳定性和安全性。
三自由度4WS模型;理想模型;前馈控制;最优控制;操纵稳定性
汽车的安全性日益受到人们的关注和重视[1],而四轮转向(4WS)技术是提高汽车操纵稳定性和安全性最有效的措施之一。四轮转向是在前轮转向的基础上,在后桥添加一套与前桥类似的装置使其也能进行转向,各大汽车公司倾向于采用前轮转向机构不变而后轮采用主动控制的转向方式[2]。后轮可以通过不同的工况进行逆向或同向或零向转向,以提高汽车的操纵稳定性、机动性及高速时的安全性和稳定性。相关文献中使用了前馈控制、模糊控制、最优控制等策略,不同控制策略可以使汽车质心侧偏角和横摆角速度的控制效果不同,其中最优控制是解决这一问题的有效途径[3-4],本文中引入最优控制策略和前馈控制与理想模型对所建立的汽车模型进行控制对比,仿真结果表明:最优控制具有较好对理想模型的跟踪能力,提高了汽车的操纵稳定性和安全性。
1 三自由度4WS汽车建模
在四轮转向分析中,通常将汽车简化为自行车模型,忽略悬架作用,认为汽车只做平行于地面的平面运动。在汽车转向过程中汽车稳定性主要取决于侧向运动和横摆运动,然而汽车也伴随有侧倾运动,侧倾运动直接影响轴荷的重新分配,前后轴左右两侧车轮的垂直载荷要发生变化;车轮有外倾角,由于悬架导向杆系的运动及变形,外倾角将随之变化;车轮上有切向反作用力;车身侧倾时悬架变形,悬架导向杆系和转向杆系将产生相应运动及变形。所以侧倾运动对汽车转向影响很深。本文中建立了简化的三自由度4WS模型,如图1所示。
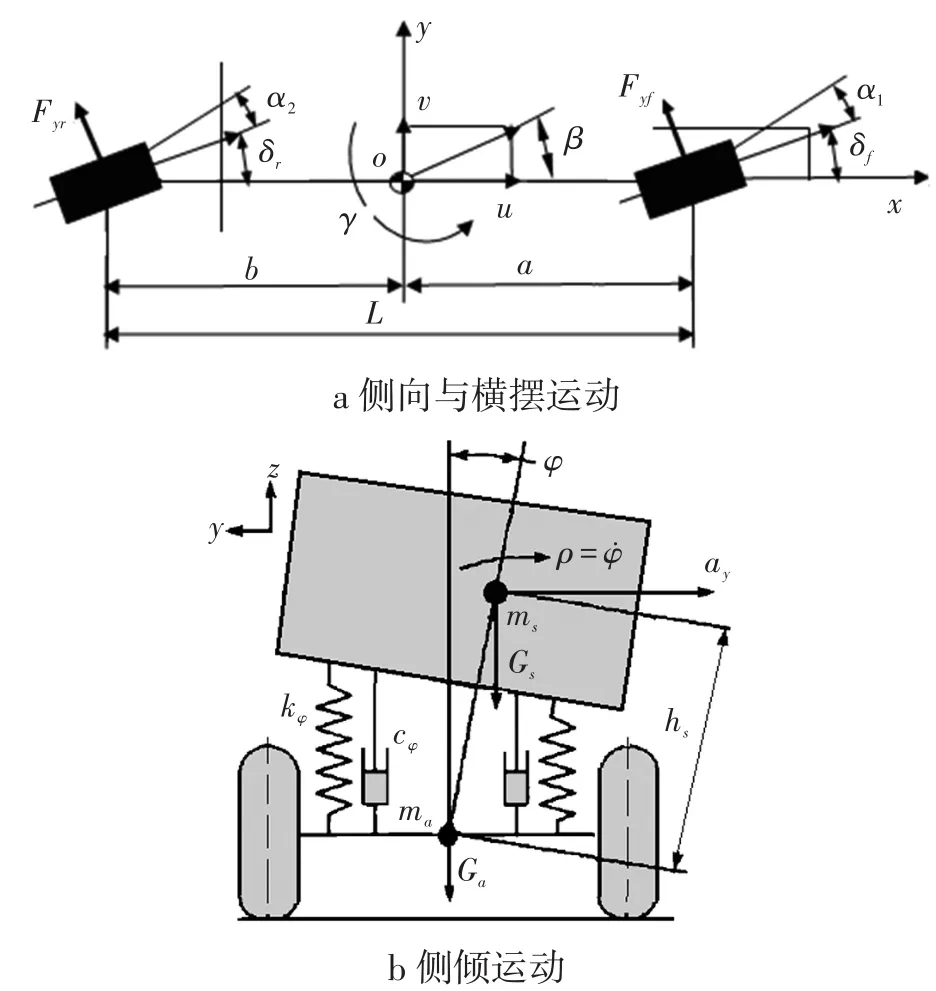
图1 三自由度汽车模型图
经运动学与动力学分析建立三自由度四轮转向汽车运动微分方程[7]。侧向运动(力平衡方程)为

横摆运动(力矩平衡方程)为

侧倾运动(力矩平衡方程)为

式中:γ为横摆角速度;β为汽车质心侧偏角;-cφ为绕x轴外力矩对侧倾角速度的偏导数;-(kφ-msghs) 为绕x轴外力矩对侧倾角φ的偏导数。式中的参数符号说明和本课题所研究的某越野车的参数如表1所示。对整车模型取状态向量,最后整理得:
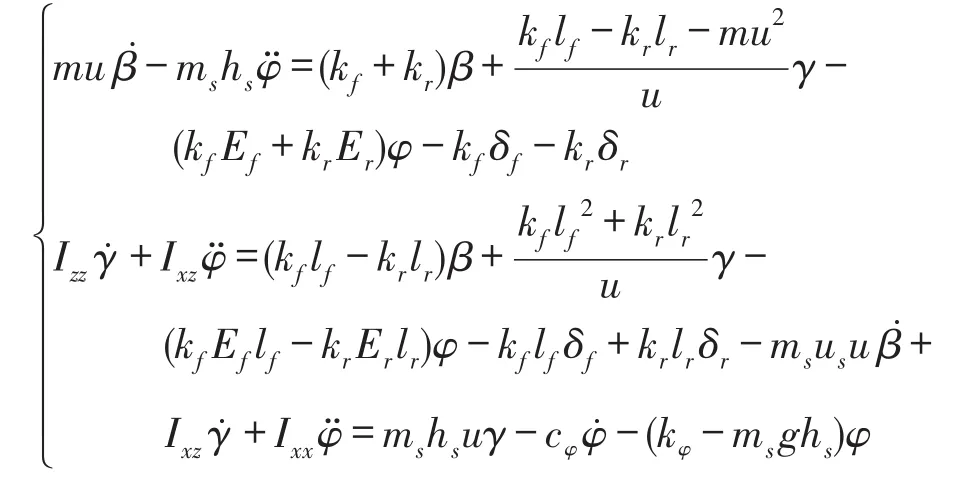
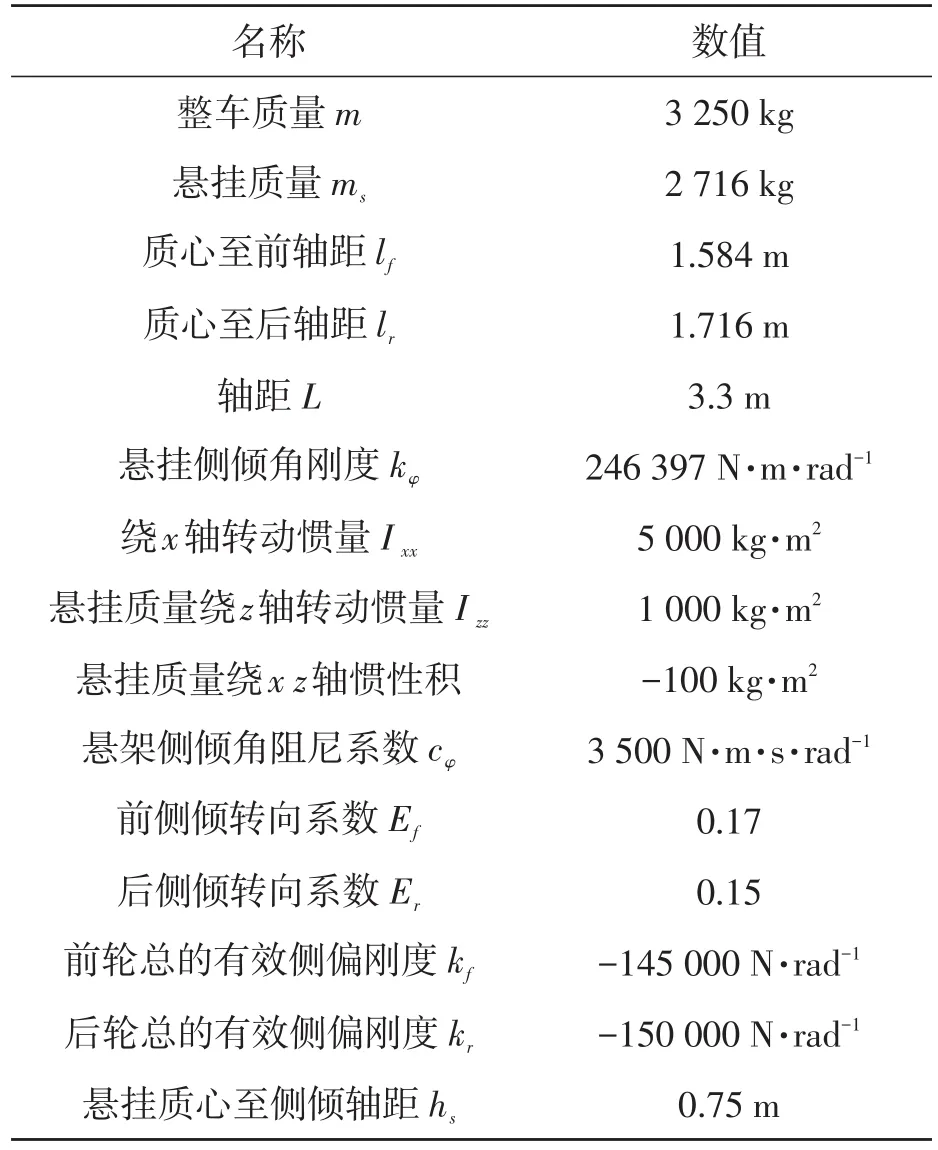
表1 整车模型参数
2 侧倾角刚度的计算
侧倾角是指车身绕瞬时转动轴线转过的角度,也就是轮胎接地点到侧倾中心的连线与原来位置偏离的角度。侧倾角刚度是影响侧倾角的一个重要关键参数,从而影响转向特性,进而影响汽车的操纵稳定性和安全性。
2.1 前后悬架总角刚度
前后悬架总角刚度是侧倾角刚度的重要一部分,计算方法参考文献[5]。前后悬架总角刚度为

式中:C11为单侧前悬架系统簧载质量,45.6 N·mm-1;C22为单侧后悬架系统簧载质量,81.5 N·mm-1;B1为满载前轮距,1 802mm;B2为满载后轮距,1 806mm。
2.2 横向稳定杆角刚度
横向稳定杆的计算简图见图2,l取327mm,l1取324.5mm,l2取43mm,l3取73.5mm,lc取1036mm,lo取803mm,lT取950mm,R取45mm。不考虑橡胶连接处变形,横向稳定杆角刚度[6]为
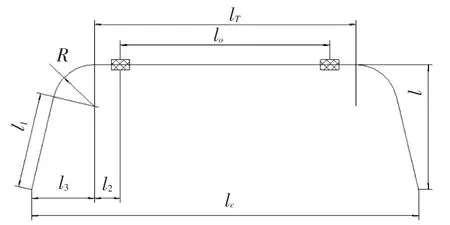
图2 横向稳定杆简图
式中:JP为实心圆轴截面极惯性矩;J为钢材截面惯性矩;d为稳定杆的直径,取28mm;ηc为横向稳定杆的杠杆比,取0.559;G为横向稳定杆材料的切变模量,取78 400 N·mm-2;E为钢材料的弹性模量,取206 000 N·mm-2。
2.3 悬架系统总的角刚度
悬架系统总的角刚度主要包括前后悬架总角刚度和横向稳定杆角刚度,通过上述计算可知悬架系统总的角刚度为

3 4WS控制器设计
3.1 前馈控制策略
通过零质心可以令X中的参数为0,即


前馈控制使三自由度四轮转向模型在转向稳态时无侧滑,横摆角速度增益有可能会与理想模型的增益相差甚远,降低路径跟踪能力,因此需要设计一套控制器,既要保证质心侧偏角尽可能趋于零,又要保证横摆角速度与理想模型相一致,使汽车的追踪效果更好。最优控制策略能更好地解决这个问题,故采用最优控制器。
3.2 参考模型
线性二自由度车辆模型可以反映驾驶员的转向输入与横摆角速度之间的线性关系,因此很多文献把线性二自由度车辆的转向特性作为汽车理想的转向特性[8]。理想模型也可以说成是参考模型,即βd=0 。理想转向横摆角速度增益[4]为

3.3 最优控制策略
最优控制理论主要是寻找最优控制向量U。根据给定的目标函数,寻求最优的控制规律。最优控制原理是基于极小值原理。
本文中采用最优控制策略对后轮进行反馈控制,与理想模型作比较,分析其控制器的优越性。其中控制性能指标为

设计离散状态调节器U=-KX,式中加权系数为
K为Kalman增益,加权系数是为了强调某一要素在整个要素体系中的重要程度而赋予此要素某一特征值的过程,特征值一般用数值表示。通过解Riccati微分方程得:

式中:P为Riccati的解,K=R-1BTP,A和B为标准状态方程的系数矩阵而非非标准的状态方程的系数矩阵。
4 建模与仿真分析
图3为Matlab/Simulink中建立的4WS汽车仿真模型。仿真工况1即车速为30 km·h-1,前轮角阶跃为15°;仿真工况2即车速120 km·h-1,前轮角阶跃为15°。依据前轮角阶跃输入对汽车操纵稳定性影响进行了前馈控制与反馈控制下的仿真。不同控制策略下质心侧偏角及横摆角速度仿真对比曲线如图4所示。
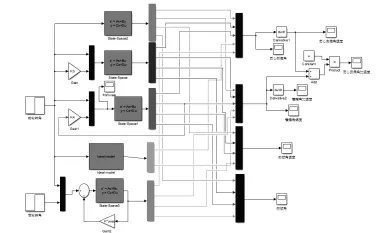
图3 4WS系统Matlab/Simulink仿真模型
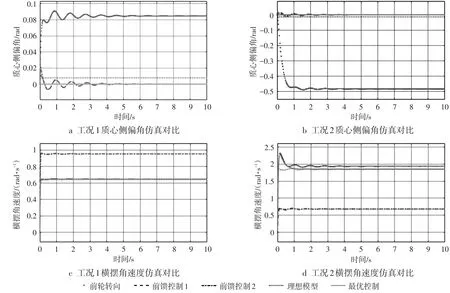
图4 不同控制策略下质心侧偏角和横摆角速度仿真对比曲线图
由图4 a~b可知:2WS的质心侧偏角超调量大、反应时间长且不为0,低速时为0.1 rad,高速时能达到-0.5 rad,致使汽车行驶方向与汽车纵向不一致;4WS汽车能够降低汽车质心侧偏角的超调量和反应时间,改善操纵稳定性,尤其是基于最优控制的汽车模型,能很快达到稳态并且基本保持质心侧偏角为0。由图4 c~d可知:三自由度前轮转向的横摆角速度和2WS的汽车基本一致,但是通过前馈控制的汽车,其横摆角速度明显与理想模型稳态值相差很大,对理想模型的跟踪能力较差,增加了驾驶员的疲劳程度。在高速时,横摆角速度增益过大,转向过于灵敏,增益过小导致转向不足。通过最优控制的汽车模型,在保证质心侧偏角基本为0的前提下,还能使三自由度4WS汽车的横摆角速度与理想模型接近,提高了汽车对理想模型的跟踪能力。上述是对角阶跃试验分析,对于单移线、斜坡等工况可以得到类似的效果。
5 结论
最优控制策略减小了汽车在前轮角阶跃输入下稳态输出响应的质心侧偏角峰值,使汽车的质心侧偏角降低到2WS的90%以上,保证质心侧偏角基本为0,横摆角速度的值与理想模型基本重合,跟踪理想模型效果较好,路径跟踪能力很好,有效地改善了四轮转向汽车质心侧偏角和横摆角速度的响应特性,提高了汽车的安全性和平稳性。
[1]马云杰.第二代汽车电子稳定程序ESPII[J].上海汽车,2015(12):30-32.
[2]Sano S,Furukaw a Y,Shiralshl S.Four Wheel Steering with Rear Wheel Steer Angle Controlled as a Function of Steering Wheel Angle[J].SAE Paper 860625,1986.
[3]刘金琨.先进PID控制MATLAB仿真[M].3版.北京:电子工业出版社,2014.
[4]吴受章.最优控制理论与应用[M].1版.北京:机械工业出版社,2011.
[5]余志生.汽车理论[M].北京:机械工业出版社,2007.
[6]周长城.车辆悬架设计及理论[M].北京:北京大学出版社,2011.
[7]周红妮,冯樱,汪振晓,范卫兵,薛敏.基于Matlab的某4WS越野车建模与仿真[J].湖北汽车工业学院学报,2015(3):17-23.
[8]冯樱,邓召文,高伟.基于联合仿真的四轮转向汽车控制策略研究[J].重庆交通大学学报,2010,29(6):997-1001.
Optimal Control Modeling and Simulation Based on 4WS of an Off-road Vehicle
Wang Siwen,Feng Ying,Liu Jingtao
(School of Automotive Engineering,Hubei University of Automotive Technology,Shiyan 442002,China)
Based on the three degree of freedom 4WS model,the optimal control Kalman gain was ob⁃tained by the optimal control theory.The vehicle model was established by Matlab/Simulink software. Selecting the big angle of angle step front wheel under different vehicle speed conditions,the simulation and comparison of the three degree of freedom 4WS model with the different control strategies and the ideal model were carried out.The simulation results show comparing with the three degree of freedom 4WS model based on the feed-forward control strategy and the three degree of freedom 2WS,the three degree of freedom 4WS model based on the optimal control strategy is more closer to the ideal model in the sideslip angle and yaw angle rate.The optimal control strategy can be applied to the 4WS of the ve⁃hicle and can improve the tracking ability of the ideal model,and improve the control stability and safe⁃ty of the vehicle.
three degree of freedom 4WS model;ideal model;feed-forward control;optimal control; handling stability
U463.4
:A
:1008-5483(2016)04-0024-04
10.3969/j.issn.1008-5483.2016.04.006
2016-09-01
湖北省自然科学基金计划重点项目(2014CFA120)
王思文(1988-),男,河南永城人,硕士生,从事汽车动力学仿真与控制技术研究。E-mail:wangsiwen526@163.com