非接触式方向盘转角传感器检测算法的研究
2017-01-11牛勃马新军江龙钟乾元张宏军
牛勃,马新军,江龙,钟乾元,张宏军
(哈尔滨工业大学 深圳研究生院,广东 深圳 518055)
非接触式方向盘转角传感器检测算法的研究
牛勃,马新军,江龙,钟乾元,张宏军
(哈尔滨工业大学 深圳研究生院,广东 深圳 518055)
提出了基于角度传感器检测量程与游标原理算法检测量程为周期的分段函数算法。与传统非接触式方向盘转角传感器游标原理算法进行了对比分析,并对其角度检测范围与分辨率等方向盘转角传感器指标进行了验证。搭建了角度试验台架以及相应的方向盘转角传感器样机。台架试验表明:该算法提高了方向盘转角传感器的检测精度,实现了其检测量程与检测精度的解耦,为实现更高的控制精度与可靠性提供了可能。
非接触式;方向盘转角传感器;分段函数算法
随着人们对汽车行驶中安全性、舒适性等的不断追求,电子稳定系统(Electronic Stability System, ESP)、高级辅助驾驶系统(Advanced Driver Assis⁃tance Systems,ADAS)等智能控制系统在国内外各种中高级轿车中得到了广泛应用。方向盘转角传感器的输出角度信号作为上述智能控制系统的信号输入源,其检测量程、检测精度以及相应的检测可靠性的要求越来越高。目前,高精度、大量称方向盘转角传感器主要通过光栅编码器来进行设计,该种设计方案具有较低的性价比,不仅提高了方向盘转角传感器的生产成本,同时其检测的可靠性较易受外界灰尘、振动等的干扰[1-3]。基于此,通过对三齿轮机械结构所采用游标原理算法的研究,提出了基于不同周期的分段函数算法,实现了方向盘转角传感器检测量程与检测精度之间的解耦,提高了其检测精度,同时在不改变齿轮机械结构的基础上实现对其检测量程进行扩展。
1 磁阻式角度传感器概述
磁阻式角度传感器作为游标原理算法的角度检测芯片,其检测原理基于磁电阻效应,通过一系列纳米级厚度的磁性多层膜叠加而成。在外界磁场的感应下,磁性多层膜的磁性阻值将会发生相应改变,从而可以远离被测物体,实现非接触式角度测量。相应的磁阻式角度传感器检测芯片有MC9S08DZ60、TLE5012等[4-6],而汽车工业中应用最多的检测芯片为英飞凌的TLE5010、TLE5012,相应的工作原理图如图1所示[7]。
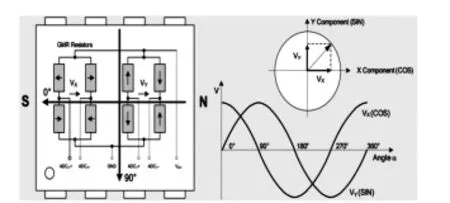
图1 磁阻式角度传感器工作原理
由图1知角度传感器由搭建为惠斯通电桥的GMRX、GMRY两部分组成,该种设计方案不仅可以使输出模拟信号幅值增大1倍,同时还可以抵消一部分外界环境干扰对其检测精度的影响。随着外界旋转磁场的变化,磁阻式角度传感器将在VX和VY端输出与旋转角度相关的正余弦模拟信号。相应的旋转角度为

式中:α为磁场旋转角度;VY为正弦信号输出;VX为余弦信号输出。由式(1)知磁阻式角度传感器的检测量程为-180°~+180°,不能够对方向盘的全量程旋转进行检测。目前主要通过三齿轮机械结构的游标原理算法来对其检测量程进行扩展[5-8]。
2 游标原理算法
游标原理算法通过三齿轮机械结构与磁阻式角度传感器来对方向盘转向轴的旋转角度进行检测,相应的机械结构图如图2所示。
图2中测量齿轮B与测量齿轮C分别内嵌一颗径向分布的柱形磁钢并与主齿轮齿合,在磁钢下方正对贴有角度传感器的PCB电路板。当主齿轮A旋转时,拖动测量齿轮B与测量齿轮C以相同的线位移旋转。旋转过程中,测量齿轮B与测量齿轮C的输出角度信号如图3所示[9]。

图2 三齿轮机械结构
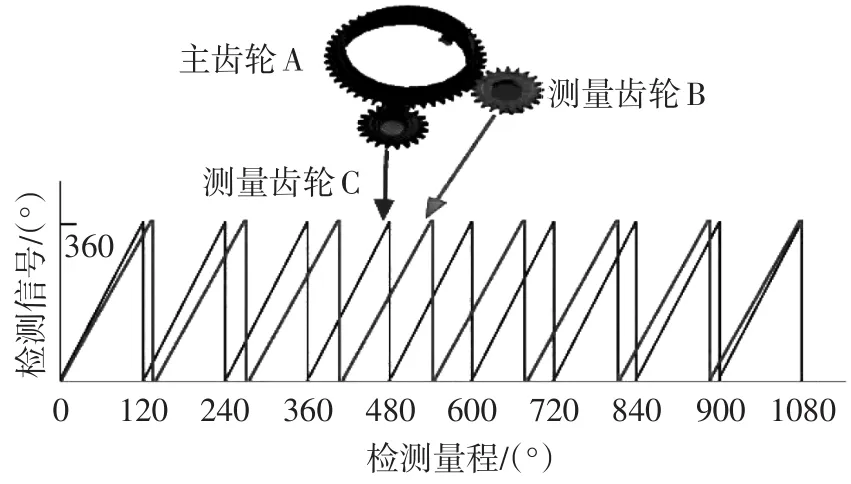
图3 游标算法原理图
由图3知:游标原理算法在一个检测量程内,测量齿轮B与测量齿轮C的检测信号差值与主齿轮A的旋转角度之间具有一一对应关系。设主齿轮A、测量齿轮B和测量齿轮C的齿数分别为ma,mb和mc,且满足ma>mb>mc。当主齿轮的转动行程为n圈时,测量齿轮B与测量齿轮C分别旋转了nma/mb圈和nma/mc圈。由于检测量程与测量齿轮检测信号差值之间的线性关系,主齿轮与测量齿轮的齿数满足:

对式(2)整理可得

由式(3)知:在传统的游标原理算法中,若三齿轮机械结构固定,则方向盘转角传感器的检测量程也唯一确定。
除此之外,游标原理算法随着检测量程的增大,方向盘转角传感器的检测精度也会线性下降。设磁阻式角度传感器的最大理论误差为±Δmax,通过游标原理算法的差值关系会使检测误差放大为±2Δmax。若方向盘转角传感器的角度检测量程为ϑ,则方向盘转角传感器的最大理论检测误差为

由式(4)知采用游标原理算法设计方向盘转角传感器的输出精度会随着检测量程的增加而成比例地下降。为了解决上述游标原理算法检测量程与检测精度之间的关系问题,同时实现方向盘转角传感器检测量程的可调,在三齿轮机械结构与游标原理算法的基础上,提出了下述基于角度传感器检测量程与游标原理算法检测量程为周期的分段函数算法,使方向盘转角传感器的检测量程与检测精度之间实现解耦。
3 分段函数算法
通过对游标原理算法的分析知:该算法的角度偏差高于2倍的磁阻式角度传感器理论误差,且随着检测量程的增加,检测精度会出现线性的下降。为真实地反应磁阻式角度传感器的检测精度以及灵活地对方向盘转角传感器的检测量程进行扩展,提出了基于角度传感器检测量程与游标原理算法检测量程为周期的分段函数算法。其中基于角度传感器检测量程为周期分段函数主要是确定测量齿轮的旋转圈数,其中相应圈数可靠性见图4。
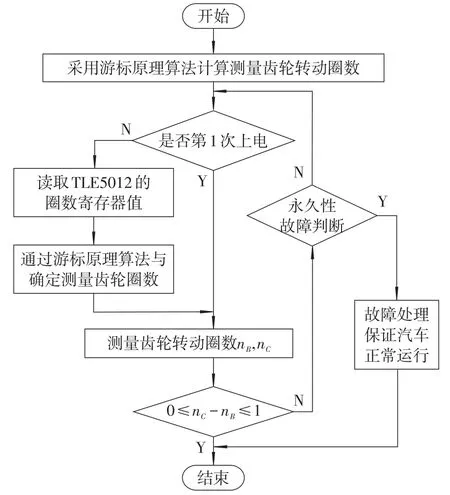
图4 检测可靠性流程图
图4中nB和nC分别为测量齿轮B与测量齿轮C的旋转圈数,在没有外界电磁等干扰的情况下两者满足nC>nB的不等式关系。从流程图4可知:当方向盘转角传感器第1次上电,角度传感器的圈数寄存器与游标原理算法所得圈数值相同,只需采用游标原理算法对测量齿轮所转的圈数进行计算,之后利用2个测量齿轮的差值关系来对检测到的圈数进行校正,保证其输出圈数的准确性;若不是方向盘转角传感器第1次上电,此时,上述2种圈数计算方法所得值会发生不到1圈的偏差,而游标原理算法的圈数检测范围有限,从而需要通过游标原理算法与磁阻式角度传感器相关寄存器值的共同作用来确定转向轴的实际旋转圈数,保证所计算测量齿轮旋转圈数的可靠性。
设ϑ1和ϑ2为方向盘转角传感器某一时刻相对机械零点位置的角度,相应的分段函数为

式中:β1和β2为此时相应测量齿轮所检测到的角度值。由于汽车所特有的电磁、振动等环境对检测信号的干扰,从而对式(5)所采集到的角度信号进行均值处理,使其更好地收敛在角度传感器原始的检测精度以内,具体表达式为

由于不同等级车型对方向盘的检测量程有不同的要求,在上述分段函数的基础上,本文中通过以游标原理算法检测量程为周期的分段函数来对方向盘转角传感器的检测量程进行扩展。
游标原理算法通过调整主齿轮与测量齿轮齿数的关系来扩展方向盘转角传感器的检测量程,但由式(4)可知,其检测精度与检测量程成反比,从而对式(5)的检测周期进行放大,实现方向盘转角传感器的检测量程与检测精度之间的解耦。相应的函数表达式为
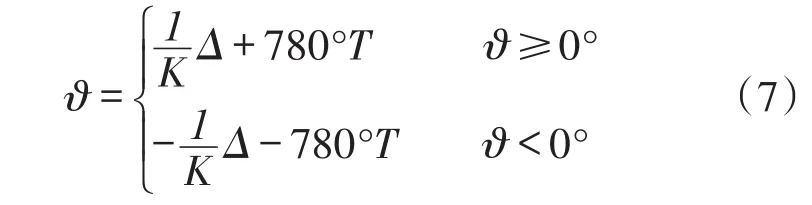
式中:ϑ=0°∘表示方向盘处于机械零点位置,而ϑ>0°∘表明此时方向盘的转动方向向右,反之向左。其中K为游标原理算法的检测斜率,T为量程扩展的周期,可以随着检测量程需求的变化而进行调整。与式(7)对应的分段函数见图5。
由图5知:采用游标原理算法检测量程为周期的分段函数的检测量程为游标原理算法检测量程的2倍及以上,且其检测精度不会随着检测量程的增加而成比例地线性下降。相应的实现过程为当方向盘转角传感器通过上位机进行零点位置标定后,实时对其输出角度信号进行分析,判断10 ms的角度更新周期内方向盘转角传感器所检测的角度信号是否发生大范围的跃变。若发生游标原理算法检测量程之间的跃变,则对测量齿轮所转圈数进行如式(8)的分析:
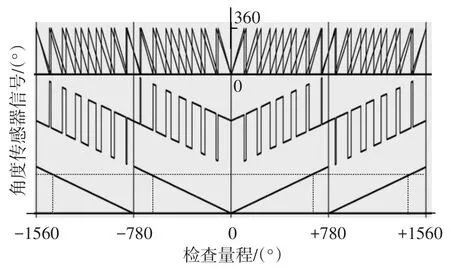
图5 量程扩展原理图

若式(8)成立,则此时方向盘转角传感器的检测量程为原有检测量程的2倍,相应的量程扩展流程图如图6所示。由图6知:量程扩展为在图4检测可靠性流程图的基础上,通过实时的检测周期是否在规定的时间内发生大范围的变化来更新式(7)的分段函数周期,从而实现方向盘转角传感器检测量程的扩展。
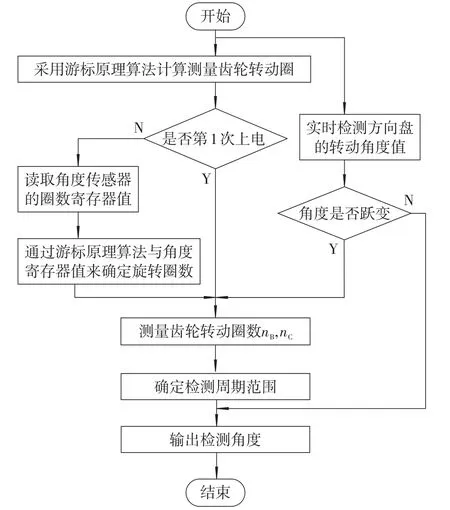
图6 量程扩展流程图
4 实验验证
为了对所提分段函数算法与传统游标原理算法在检测精度与检测量程等性能进行对比分析,以及对分段函数算法的角速度检测范围与分辨率等方向盘转角传感器指标进行验证,设计了如图7所示的PCB,对应的电路原理框图如图8所示。
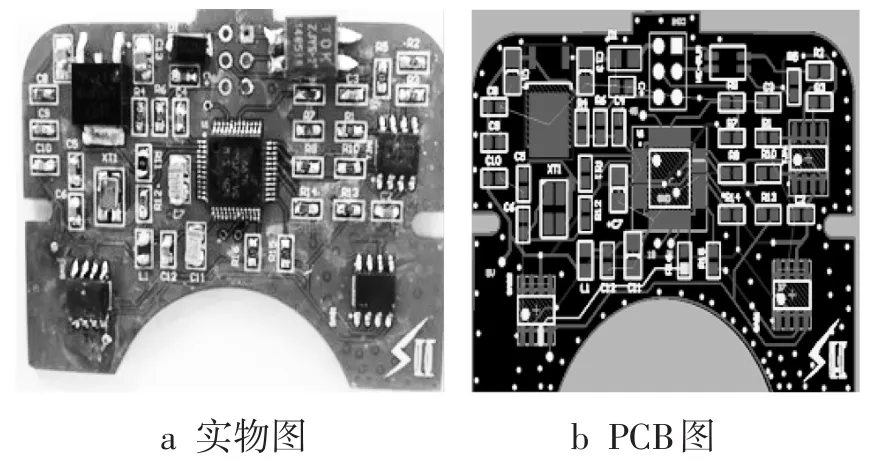
图7 硬件PCB图与实物图
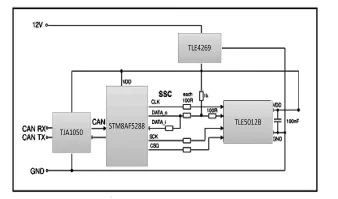
图8 硬件原理框图
为了更好地与现有游标原理算法相关产品方向盘转角传感器进行对比,采用了BOSCH LWS5的方向盘转角传感器的机械结构以及同系列的角度传感器TLE5012B,相应的磁阻式角度传感器的检测精度与齿轮齿数关系为45,15,13。简要的检测原理为通过TLE4269将车载12V电源降到8位单片机STM8AF5288的5 V工作电源,接着单片机以10 ms为周期与TLE5012B以SPI方式进行通信,之后通过TJA1050以CAN报文的形式发送到上位机,从而对分段函数算法的检测精度与检测量程进行分析。为了对所设计方向盘转角传感器样机的检测精度进行分析,从而选择了10000线的光栅编码器,相应的最终方向盘转角检测系统图见图9。
从图9的检测系统知高精度光栅编码器与所设计方向盘转角传感器样机采用同轴固定,通过对步进电机的控制,使两者实现同轴旋转,保证所设计方向盘转角传感器对转向轴旋转角度检测的可靠性。最后通过CAN/USB转换器将检测到的角度信号发送到上位机对其进行分析,来对分段函数算法的可靠性以及检测精度进行验证[10]。
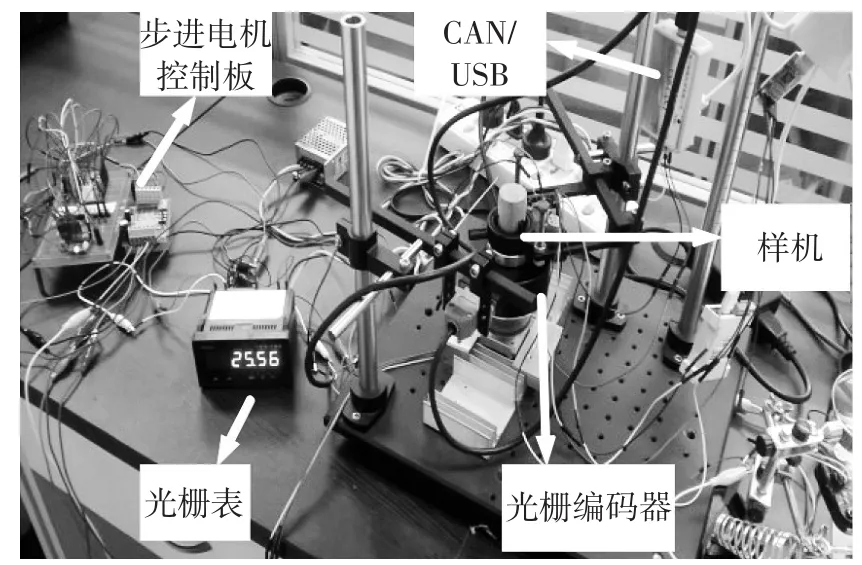
图9 方向盘转角检测系统
通过对方向盘转角传感器硬件以及相应检测系统的设计,最终可得如表1所示的检测结果:1)分段函数算法的检测精度较游标原理算法检测精度高。其中前者的检测精度可以达到±1°,后者的检测精度为±2.5°,部分点的偏差达到4.14°,需要通过较高数据处理能力的单片机来对齿轮齿合、滞环等非线性误差进行补偿[11-12]。2)分段函数算法实现了方向盘转角传感器检测量程与检测精度之间的解耦。不需要通过调整齿轮之间的齿数的关系即可调整方向盘转角传感器的检测量程。
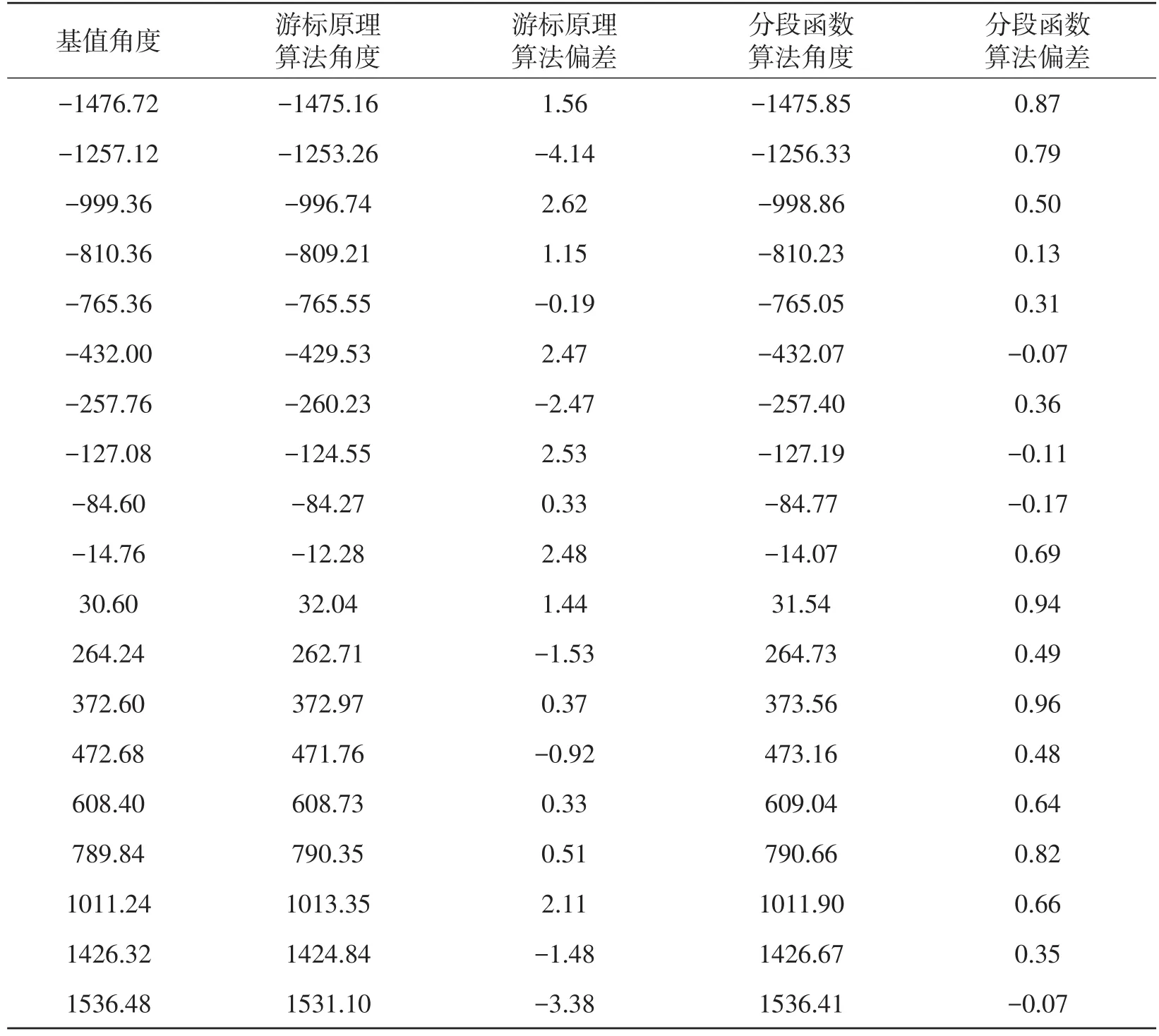
表1 检测数据 (°)
通过图9检测系统对样机进行测试,所设计方向盘转角传感器在分段函数算法基础上达到的检测性能与现有产品的对比如表2所示。由表2的检测性能对比可知:分段函数在角度检测范围以及角度精度等反应方向盘转角传感器的指标上较现有北京恒润、博世以及伯恩斯等厂家具有一定的优势。除此之外,实验室采用博世LWS5的三齿轮机械结构,选用的8位MCU具有较高的性价比。
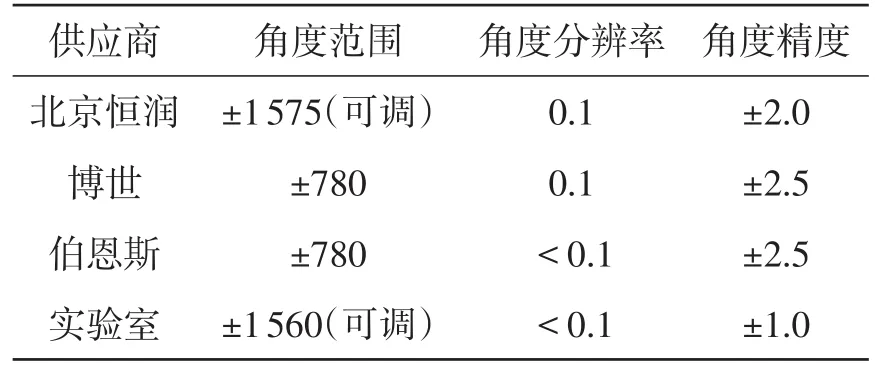
表2 检测性能对比 (°)
5 结论
通过对方向盘转角传感器游标原理算法的分析提出基于不同分段周期的分段函数算法。经过台架验证,其不仅提高了检测精度,实现了检测量程与检测精度的解耦,同时具有较高的性价比,为实现更高的控制精度与可靠性提供了可能;满足后续ESP、ADAS等智能汽车电子系统的要求,有较高的实际应用价值。
[1]TOKUMOTO Y,SHIBA M,MAEDA N.Development of Next-Generation Steering Sensor for Electric Power Steer⁃ing[J].Koyo Engineering Journal English Edition,2004,165E.
[2]Howard D U.Precision Steer Wheel Control System with Internal Solenoid:US,US6817620 B1[P].2004.
[3]杨财,周艳霞.方向盘转角传感器研究进展[J].传感器与微系统,2008,26(11):1-4.
[4]戴望军,石广林,熊松林.基于MC9S08DZ60汽车方向盘转角传感器的开发[J].湖北汽车工业学院学报,2013,2(2):37-4.
[5]张英福.巨磁电阻在方向盘转角传感器中的应用[J].重庆工学院学报(自然科学版),2009,23(10):17-20.
[6]Howard D U.Steer Wheel Control System with Trimmable Rotary Plate:US,US6994361 B2[P].2006.
[7]Didier A,Didier F,Gerald M.Development of A Contact⁃less Hall Effect Torque Sensor for Electric Power Steering[J].SAE,2006,01:939.
[8]Li R,Wu J,Wang H.Design Method of CAN Bus Net⁃work Communication Structure for Electric Vehicle[C]. IEEE 2010 International Forum on Strategic Technology(IFOST).IEEE,2010:326-329.
[9]李浩,徐衍亮.电动汽车方向盘绝对角位置传感器的研究[J].传感器与微系统,2011,30(3):32-34.
[10]徐涛,过学迅,杨波.基于转角的电动助力转向系统回正性能控制[J].湖北汽车工业学院学报,2009,23(1):4-7.
[11]周良杰,赵志国.方向盘转角传感器误差成因与补偿的研究[J].仪表技术与传感器,2013,11(2):7-10.
[12]杨平,黄妙华,喻厚宇.宽量程方向盘转角传感器系统研究[J].武汉理工大学学报(信息与管理工程版),2014,6(6):829-833.
Research on Algorithm of Non-contact Steering Wheel Angle Sensor Detection
Niu Bo,Ma Xinjun,Jiang Long,Zhong Qianyuan,Zhang Hongjun
(Shenzhen Graduate School,Harbin Institute of Technology,Shenzhen 518055,China)
The piecewise function algorithm based on the cycle of angular sensor detection range and ver⁃nier principle algorithm detection range was proposed.The algorithm was compared with the traditional non-contact vernier algorithm,and the steering wheel angle sensor indicators of the angular velocity de⁃tection range,resolution and so on were verified.The experimental prototype of the steering wheel angle sensor was set up.The bench test shows that the piecewise function algorithm improves the detection precision of the steering wheel angle sensor,realizes the decoupling between the detection range and the detection precision,and makes it possible to realize higher control accuracy and reliability.
non-contact;steering wheel angle sensor;piecewise function algorithm
U463.43
:A
:1008-5483(2016)04-0018-06
10.3969/j.issn.1008-5483.2016.04.005
2016-06-10
牛勃(1989-),男,陕西榆林人,硕士,工程师,从事电力电子研究。E-mail:nbblackdog@163.com
马新军(1972-),男,新疆石河子人,副教授,从事汽车电子ECU研究。E-mail:maxj@hitsz.edu.cn
