康复机器人辅助步行训练对不完全性脊髓损伤患者步行能力的影响
2017-01-10林海丹张韬陈青李宏伟白定群
林海丹 张韬 陈青 李宏伟 白定群
康复机器人辅助步行训练对不完全性脊髓损伤患者步行能力的影响
林海丹1张韬1陈青1李宏伟1白定群1
为探讨康复机器人辅助步行训练(Robot-assisted gait training,RAGT)对不完全性脊髓损伤(Incomplete spinal cord injury,ISCI)患者步行能力的影响,将16例ISCI患者随机分配至对照组(常规康复治疗+地面步行训练)及试验组(常规康复治疗+RAGT).治疗前及治疗4周、8周、12周后,分别进行下肢运动功能评分(Low extremity motor score,LEMS)及脊髓损伤步行指数II(Walking index for spinal cord injury II,WISCI II)评定.治疗后,两组患者LEMS均有提高(P<0.05),但试验组LEMS与对照组比较差异无统计学意义(P>0.05).对照组治疗后各时间点WISCI II均较治疗前改善(P<0.05),试验组在治疗8周及12周后WISCI II较治疗前改善(P<0.05),但试验组WISCI II在训练12周后较对照组有明显提高(P<0.05).RAGT与地面步行训练在提高肌力上比较无明显差异,但在改善步行能力上RAGT优于地面步行训练.
康复机器人辅助步行训练,地面步行训练,脊髓损伤,步行能力
DOI10.16383/j.aas.2016.c160173
脊髓损伤(Spinal cord injury,SCI)是一类可引起明显运动功能障碍的神经系统损伤性疾病,其中,步行能力的缺失或受限是主要的运动功能障碍表现,也严重影响患者日常生活独立性.因此,恢复步行功能是SCI康复的重要内容之一[1].而步行训练是恢复步行功能的主要康复方法.研究表明,步行训练的关键在于训练中能否重复模拟自然行走步态,并保持正确的本体感觉和外部感觉反馈[2].针对这一理论,减重平板训练(Body weight supported treadmill training,BWSTT)被应用于SCI患者的步行训练.近期的随机对照试验及Meta分析发现减重平板训练可提高脊髓损伤患者的步行能力[3−7].然而,进行BWSTT时,虽然可通过悬吊减重系统对患者进行体重支持,但在步行训练过程中需要2~3个治疗师对患者躯干、下肢进行控制辅助,故训练过程中无法保证每个步行周期的感觉输入一致[1].由于上述缺点,限制了BWSTT的临床应用.而传统的地面步行训练不仅对患者运动能力要求较高,同时也存在难以提供足够的重复性步行的缺点.为了减少治疗师在步行训练中的繁重体力劳动,同时为患者提供可重复的正确步态步行训练,下肢康复机器人被逐步应用.大量的临床试验发现下肢康复机器人辅助步行训练(Robot-assisted gait training,RAGT)可提高不完全性脊髓损伤(Incomplete spinal cord injury,ISCI)患者的步行能力、步行速度、耐力等[8−16].但这些试验多为自身前后对照试验,结果缺乏统计分析,随机对照试验少,同时大多存在样本量不足等缺点.而最新的Meta分析及系统评价也显示,由于缺乏足够的临床证据,RAGT对SCI患者步行能力的效果尚不确定[7,17−18].因此,笔者希望通过随机对照试验探讨RAGT对ISCI患者的步行能力的影响.
而目前的RAGT临床试验,在对ISCI患者进行步行能力的评价时,还存在着对损伤程度及病程相似的患者采用的评价指标不统一的特点.这大大影响了不同临床试验之间的比较,也不利于Meta分析等的进行.而目前在针对ISCI患者步行能力的评价上,主要从下肢运动功能及步行功能两方面进行.目前在下肢运动功能评价中,国际通用指标是美国脊髓损伤学会(American spinal injury association,ASIA)制定的脊髓损伤神经学分类国际标准中的下肢运动功能评分(Low extremity motor score,LEMS).该项目也是判断脊髓损伤ASIA分级的重要评价指标之一[19].而在SCI患者步行功能评价上,临床上常用到功能独立性评定(Functional independence measure,FIM)、脊髓损伤独立性评定(Spinal cord independence measure,SCIM)等.虽然这些评定方法包含有步行功能的评定内容,但在反映步行功能上存在敏感性差的缺点[20].近年来,脊髓损伤步行指数II(Walking index for spinal cord injury II,WISCI II)、限时步行试验及运动学参数在ISCI患者步行功能评价上的应用日渐广泛[8−11,13−16,21−22],但其适用人群及使用条件各有不同.WISCI II是目前评价SCI患者在康复机构内的步行能力的常用指标,更适用于早期或步行功能障碍严重的SCI患者[20],并与ASIA分级具有一致效度[20].而限时步行试验需患者在一定时间内或一定距离内进行步行或完成与步行相关的行为任务,故其可以反映出SCI患者步行速度、耐力等情况,主要适用于慢性ISCI患者,但并不适用于严重步行功能障碍者[20],故对于部分在治疗前无法进行站立的SCI患者难以实施.而运动学参数测试需依赖于三维步态分析等设备,并不适合所有医疗机构进行,在临床推广上受到限制.本次随机对照临床试验中主要针对病程2~6月的非慢性期ISCI患者,因此,笔者选择对患者治疗前后进行LEMS及WISCI II评价,以更好反映患者治疗前后的步行能力变化.
1 对象与方法
1.1 研究对象
入选标准:1)年龄20~65岁;2)符合ASIA残损分级诊断标准[19],ASIA分级为C~D,伴有双下肢运动功能障碍;3)入选前,SCI患者应已接受相应临床治疗或内固定等手术治疗,经X线确定脊柱稳定,生命体征平稳;4)入选时SCI病程2~6月; 5)患者签署知情同意书.
排除标准:1)双下肢肌张力改良Ashworth分级≥2级;2)伴有精神症状、听力障碍、理解障碍者;3)患有其他影响步行能力的神经肌肉或骨关节疾病;4)患有限制患者活动能力的合并症或并发症,如直立性低血压、下肢深静脉血栓形成、严重心肺疾病等;5)体重>135kg,身高>200cm,大腿长度<35cm或>48cm.
选取2014年1月~2016年1月于重庆医科大学附属第一医院康复医学科住院治疗的符合上述标准的不完全性SCI患者共16名,按照随机数字表法,奇数者纳入试验组,偶数者纳入对照组,每组各8位.2组患者的性别(χ2=0.417,P=0.519)、年龄(P=0.246)、入组时病程(P=0.910)、损伤节段(χ2=4.499,P=0.480)、损伤程度(χ2=0.292,P=0.589)、导致SCI的疾病种类(χ2=2.773,P=0.428)等一般资料经统计学分析,差异均无统计学意义(P>0.05),具有可比性,详见表1.
1.2 治疗方法
两组均接受常规康复治疗,每日1次,每次60min,每周5次,共12周,具体治疗包括下肢牵伸训练、下肢肌力及关节活动度训练、坐位及跪位平衡训练、站立训练、下肢肌电生物反馈治疗、矫形器的使用.
对照组在常规康复治疗基础上进行地面步行训练,包括平衡杠内、使用辅助器具下的地面步行训练,每日1次,每次30min,每周5次,共12周.
试验组在常规康复治疗基础上进行康复机器人辅助步行训练.
本研究中使用的康复机器人为外骨骼式的A3步行康复机器人(产品型号:A3步行康复机器人;生产厂家:广州一康医疗设备实业有限公司;产地:广州).A3步行康复机器人(如图1所示)主要由下肢外骨骼式矫正器、悬吊减重系统和医用跑台组成. A3步行康复机器人可对髋关节和膝关节活动范围、步态偏离量、双下肢的引导力、减重量和运动速度等参数进行调整,并通过计算机在训练过程中进行实时控制.此外,外骨骼式矫正器的髋膝关节装有位置和力量感受器,以利于治疗师通过计算机屏幕了解患者的运动表现,同时也可以通过电脑屏幕将运动情况实时反馈给患者.
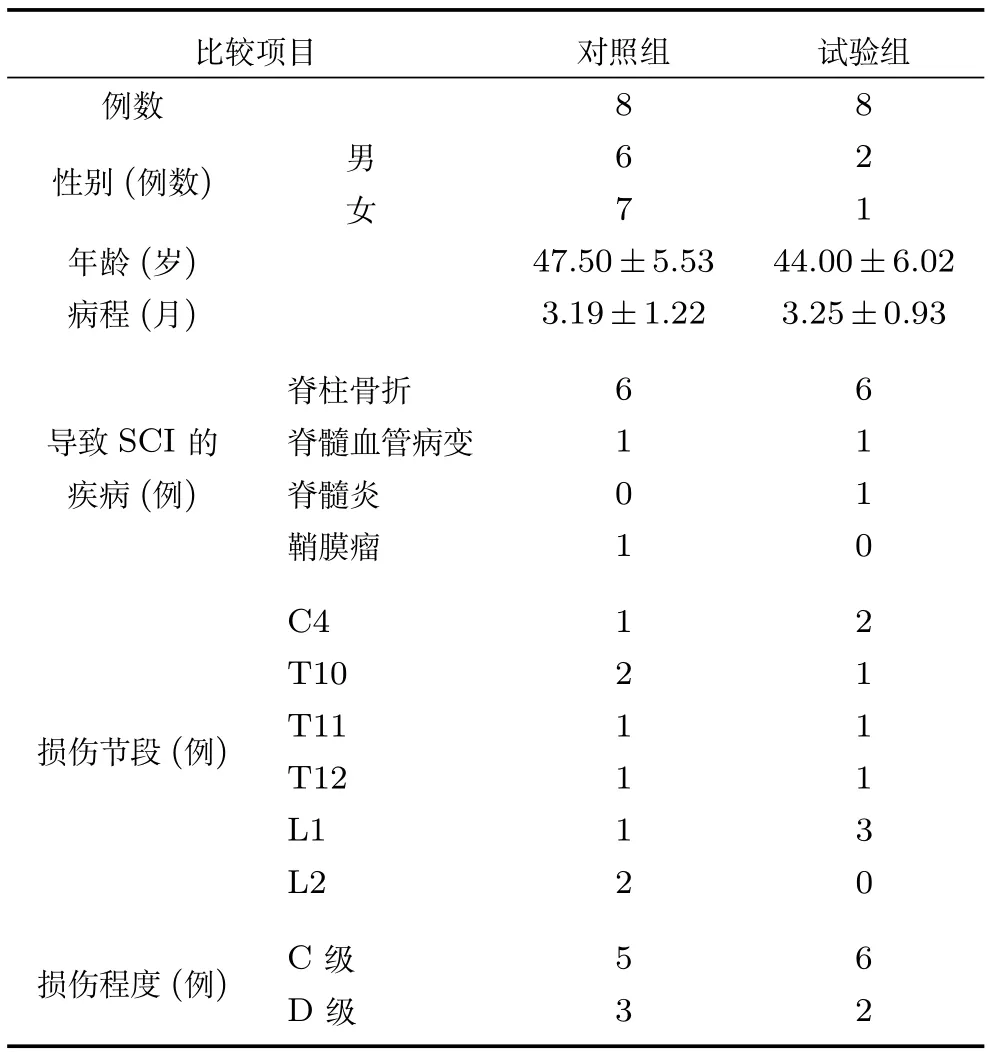
表1 2组患者一般资料比较Table 1 The comparison of general data between the control and test groups

图1 A3步行康复机器人Fig.1 A3 walking-rehabilitation robot
康复机器人辅助步行训练:训练前,首先利用悬吊减重系统对患者进行悬吊,通过胸腰部绑带来实现患者部分体重的支撑.在悬吊状态下利用3个可调节的固定带将患者双下肢固定于外骨骼式矫正器的机械臂上,同时使用足部升降带固定患者的双侧踝关节于中立位,当患者在迈步时可被动地引起踝背屈.训练时,设定减重量、机械臂引导力及步行速度,减重量一般从体重的30%~50%开始,机械臂引导力则一般从80%~100%开始,起始步行速度一般为0.9~1.0km/h.在后续训练中,治疗师根据患者的运动能力(包括下肢肌力、步行训练时患者下肢主观用力情况及足尖与跑台间有无擦挂、步行偏离量等)调整上述参数,以保证患者训练过程中步行轨迹及步行节律基本正常.每次训练30min,每日1次,每周5次,共12周.
1.3 评定标准
2组患者于治疗前、治疗4周后、治疗8周后、治疗12周后分别进行LEMS及WISCI II[20]评定.评定由不参与2组患者治疗的两位治疗师独立完成, LEMS采用两位治疗师评定的均值,WISCI II则采用两位治疗师评定结果中偏低的一位[20].
LEMS:采用ASIA《脊髓损伤神经学分类国际标准(2011年修订)》中的运动项目评分方法[19]对患者下肢运动功能进行评定,下肢运动功能评分双侧总分为50分.
WISCI II:由脊髓损伤步行指数I于2001年修订而形成,根据步行能力损伤的程度,以患者步行10m距离时所需要的设备、矫形器和身体帮助为基础,将步行能力分为21级(0级~20级),级别越高,步行能力损害程度越低[20].
1.4 统计学分析
本研究所得计量资料以 (¯x±s)表示,采用SPSS22.0版统计学软件包进行数据处理.患者一般资料中的计数资料组间比较采用χ2检验,一般资料中的计量资料组间比较采用成组设计t检验,两组患者治疗前、后所得计量资料(LEMS及WISCI II)的组内比较及组间比较采用单变量重复测量方差分析,P<0.05表示差异具有统计学意义.
2 结果
所有患者均完成12周训练及共计4次评定.
2.1 治疗前两组患者LEMS及WISCI II的比较
治疗前对照组及试验组LEMS分别为19.625±8.193、15.125±12.287,两者差异无统计学意义(F=0.743,P=0.403,见表2),而WISCI II分别为0.500±0.535、2.250±3.882,两者差异无统计学意义(F=1.595,P=0.227,见表3).

表2 2组患者LEMS比较Table 2 The comparison of LEMS between the control and test groups

表3 2组患者WISCI II比较Table 3 The comparison of WISCI II between the control and test groups
2.2 两组患者治疗前后LEMS的比较
治疗前后4个不同时间点上,对照组及试验组的LEMS不完全相同,差异具有统计学意义(F=22.996,P=0.000).对照组LEMS在治疗4周后、8周后及12周后分别为21.750±7.797、23.000±7.856、24.125±7.736,与治疗前比较,均有提高,且差异具有统计学意义(P=0.031,P=0.011,P=0.005).试验组LEMS在治疗4周后、8周后及12周后分别为18.875±13.830、20.750±14.665、22.750±15.276,与治疗前比较,均有提高,且差异具有统计学意义P=0.001,P=0.001,P=0.005),详见表2.
2.3 两组患者治疗前后WISCI II的比较
治疗前后4个不同时间点上,对照组及试验组的WISCI II不全相同,差异具有统计学意义(F=22.831,P=0.000).对照组WISCI II在治疗4周后、8周后及12周后分别为2.500±1.414、5.500±3.162、7.250±4.234,与治疗前比较,均有提高,且差异具有统计学意义(P=0.003,P=0.003,P=0.003).试验组WISCI II在治疗4周后、8周后及12周后分别为7.500±7.387、10.875±6.664、13.750±5.036,与治疗前比较,均有提高,但治疗4周后与治疗前比较差异无统计学意义(P=0.138),而治疗8周后及12周后分别与治疗前比较,差异具有统计学意义(P=0.022,P=0.003),详见表3.
2.4 治疗后两组患者LEMS及WISCI II的比较
治疗4周后、8周后及12周后,试验组LEMS稍低于对照组,但差异无统计学意义(F=0.262,P=0.616;F=0.146,P=0.708;F=0.052,P=0.824),详见表2;治疗4周后及8周后,试验组WISCI II均较对照组有所提高,但差异无统计学意义(F=3.535,P=0.081;F=4.248,P=0.058),治疗12周后,试验组WISCI II高于对照组,且差异具有统计学意义(F=7.809,P=0.014),详见表3.
3 讨论
有研究显示,SCI后神经功能自发恢复主要在前2个月,3~6月则恢复明显减慢[23].为了了解RAGT对ISCI患者步行能力的影响,避免SCI后的自发恢复干扰,在本次研究中选择入组时病程为2~6月的SCI患者作为研究对象.本次研究结果发现,发病2~6月的ISCI患者经RAGT后,LEMS及WISCI II均有提高,表明患者下肢肌力及步行能力有改善.这与国内外自身前后对照研究的结果相一致[8−11].而本次研究中对患者进行12周的RAGT,每4周进行一次评定,以发现RAGT对ISCI患者步行能力影响的时效关系.本研究显示RAGT训练4周后,患者的WISCI II虽然有所提高,但并不明显,而训练8周及12周后,WISCI II改善则较为明显,并具有统计学意义.这表明对ISCI患者进行RAGT,需至少进行8周或以上的训练才有可能获得步行能力的改善.这与国内外研究结果相似[8−11,13].但近期有研究发现,RAGT训练4天后,SCI患者的6分钟步行距离及10米步行时间即有提高,并且在治疗结束后1周内仍有改善[14].我们认为这与不同研究使用不同的评价标准及患者具体运动功能不一致有关.本次试验中使用LEMS及WISCI II来反映患者的步行能力,而非限时步行试验类的评价指标.有研究显示WISCI II与限时步行试验的相关性在SCI伤后早期,尤其前1个月内较高,而此后相关性下降[20].而两研究中患者入组时病程并不一致.同时,本研究中所纳入的患者损伤平面更高,且运动功能水平相对较差,在入组时不具备进行限时步行试验的能力.这些都有可能引起研究结果的差异.
目前步行训练有地面步行训练、BWSTT及RAGT.由于RAGT可为患者提供安全、重复、高强度、较长时间的训练,能及时提供足够的反馈信息,并允许患者在病情稳定后尽早开始训练[1],其应用正逐步增多.但RAGT是否优于前两者,目前尚不明确[7,17−18].本次研究表明,ISCI患者进行常规康复治疗下,经地面步行训练或RAGT后,患者LEMS及WISCI II均有改善,但是RAGT并不完全优于地面步行训练,与Labruyre等[21]的研究相似.我们认为可能与本研究使用的机械臂引导力偏大有关,使患者自主最大用力减小,从而影响下肢肌力的恢复.同时有研究显示,ISCI患者进行RAGT,使用抗阻训练方式与使用助力训练方式相比,前者更能提高患者的步行耐力、速度及步行能力[13,22].结合本次研究与其他研究,这说明在RAGT训练过程中,应尽可能地发挥患者自主最大用力,根据患者的自主最大用力情况适当调整引导力.尽管本次单盲随机对照研究发现RAGT在提高肌力上与地面步行训练比较并无明显差异,但经过更长时间的训练后,RAGT在改善步行能力上优于地面步行训练,这与Alcobendas-Maestro等[13]的随机对照试验类似.目前认为RAGT提高ISCI患者的步行能力,与其可提供下肢重复负重步行训练有关.RAGT训练时,不断进行的节律性下肢负重步行,可向中枢神经系统不断地提供多种有关步行的感觉刺激,促进中枢神经系统对不同感觉输入的整合,并增强脊髓内的中枢模式发生器(Central pattern generator, CPG)的功能,从而加强主动肌及拮抗肌的协调运动,产生节律性步行[6,9,24−25].
4 结论
通过本研究,我们发现使用A3步行康复机器人进行的RAGT可以提高ISCI患者的下肢肌力及步行能力,而RAGT在提高肌力上与地面步行训练相比并无明显差异,但在改善步行能力上,12周训练后,RAGT优于地面步行训练.但本研究仍存在样本量少、缺乏长时间随访等缺点,同时如何确定RAGT最佳治疗参数仍然是治疗中的一大问题,为进一步了解RAGT对ISCI患者的下肢肌力及步行能力的影响,仍需进行更大样本量及不同治疗参数设置的研究,同时通过完善治疗后随访了解RAGT的长期治疗效应.
1 Pan Yu,Qie Shu-Yan.Research of lower limb rehabilitation robot and its application in spinal cord injury.Chinese Journal of Spine and Spinal Cord,2013,23(11):1010−1014 (潘钰,郄淑燕.下肢康复机器人及其在脊髓损伤康复中应用的研究进展.中国脊柱脊髓杂志,2013,23(11):1010−1014)
2 Barbeau H.Locomotor training in neurorehabilitation: emerging rehabilitation concepts.Neurorehabilitation and Neural Repair,2003,17(1):3−11
3 Dobkin B,Apple D,Barbeau H,Basso M,Behrman A, Deforge D,Ditunno J,Dudley G,ElashofR,Fugate L, Harkema S,Saulino M,Scott M.Weight-supported treadmill vs over-ground training for walking after acute incomplete SCI.Neurology,2006,66(4):484−493
4 Leahy T E.Impact of a limited trial of walking training using body weight support and a treadmill on the gait characteristics of an individual with chronic,incomplete spinal cord injury.Physiotherapy Theory and Practice,2010,26(7):483−489
5 Yan Jin-Yu,Li Jian-Feng,Zhang Xu,Liu Zun-Nan,Li Dong-Sheng.Electroacupunctureandbody-weightsupported treadmill training after vertebral fractures.Chinese Journal of Physical Medicine and Rehabilitation,2010,32(9):693−696 (闫金玉,李剑锋,张旭,刘遵南,李东生.电针配合减重平板训练治疗胸腰段椎体骨折致脊髓损伤的临床研究.中华物理医学与康复杂志,2010,32(9):693−696)
6 Wang Chao-Yang,Zhang Ji-Rong,Wu Shuang,Huang Yu, Long Yan,Zheng Dong-Hua,Pei Qiang.The clinical efcacy of body weight supported treadmill training for the recovery of walking ability and comprehensive function after thoracolumbar spinal cord injury.Chinese Journal of Physical Medicine and Rehabilitation,2013,35(3):181−184 (王朝阳,张继荣,吴霜,黄宇,龙燕,郑栋华,裴强.减重步态训练对胸腰段脊髓损伤患者步行能力及综合功能恢复的临床疗效.中华物理医学与康复杂志,2013,35(3):181−184)
7 Li Jian-Min,Hao Zheng-Wei,Zhao Ya-Ning.Efcacy of different gait training on walking for chronic incomplete spinal cord injury:a meta-analysis.Chinese Journal of Rehabilitation Theory and Practice,2013,19(2):183−188 (李建民,郝正玮,赵雅宁.不同步态训练方法对慢性不完全性脊髓损伤患者步行功能效果的Meta分析.中国康复理论与实践,2013,19(2):183−188)
8 Guo Su-Mei,Li Jian-Min,Wu Qing-Wen,Shen Hai-Tao.Effect of robot gait training on muscles and walking ability in patients with incomplete spinal cord injury.Chinese Journal of Rehabilitation Medicine,2012,27(4):360−363 (郭素梅,李建民,吴庆文,沈海涛.机器人步态训练对不完全性脊髓损伤患者肌肉及步行功能的影响.中国康复医学杂志,2012,27(4): 360−363)
9 Guo Su-Mei,Li Jian-Min,Wu Qing-Wen,Shen Hai-Tao.Effect of gait training and assessment system of Lokomat automatic robot on walking ability of patients with incomplete spinal cord injury.Chinese Journal of Tissue Engineering Research,2012,16(13):2324−2327 (郭素梅,李建民,吴庆文,沈海涛.Lokomat全自动机器人步态训练与评定系统对不完全性脊髓损伤患者步行功能的影响.中国组织工程研究,2012,16(13):2324−2327)
10 Guo Su-Mei,Li Jian-Min,Wu Qing-Wen,Shen Hai-Tao, Liu Guang-Tian.Efect of robot-assisted walking therapy on gait of patients with incomplete spinal cord injury.Chinese Journal of Rehabilitation Theory and Practice,2013,19(7):676−679 (郭素梅,李建民,吴庆文,沈海涛,刘广天.步态训练机器人对不完全性脊髓损伤患者步态的影响.中国康复理论与实践,2013,19(7): 676−679)
11 MorehE,MeinerZ,NeebM,HillerN,SchwartzI. Spinal decompression sickness presenting as partial Brown-Sequard syndrome and treated with robotic-assisted bodyweight support treadmill training.Journal of Rehabilitation Medicine,2009,41(1):88−89
12 Lam T,Pauhl K,Krassioukov A,Eng J J.Using robotapplied resistance to augment body-weight-supported treadmill training in an individual with incomplete spinal cord injury.Physical Therapy,2011,91(1):143−151
13 Alcobendas-Maestro M,Esclarn-Ruz A,Casado-Lpez R M,Muoz-Gonzlez A,Prez-Mateos G,Gonzlez-Valdizn E,Martn J L R.Lokomat robotic-assisted versus overground training within 3 to 6 months of incomplete spinal cord lesion:randomized controlled trial.Neurorehabilitation and Neural Repair,2012,26(9):1058−1063
15 Fleerkotte B M,Koopman B,Buurke J H,Van Asseldonk E H,Van Der Kooij H,Rietman J S.The efect of impedancecontrolled robotic gait training on walking ability and quality in individuals with chronic incomplete spinal cord injury: an explorative study.Journal of Neuroengineering and Rehabilitation,2014,11:Article No.26
16 Sale P,Russo E F,Russo M,Masiero S,Piccione F,CalabrR S,Filoni S.Efects on mobility training and deadaptations in subjects with spinal cord injury due to a wearable robot:a preliminary report.BMC Neurology, 2016,16:Article No.12
17 Morawietz C,Mofat F.Efects of locomotor training after incomplete spinal cord injury: a systematic review.Archives of Physical Medicine and Rehabilitation,2013,94(11):2297−2308
18 Mehrholz J,Kugler J,Pohl M.Locomotor training for walking after spinal cord injury.Spine,2008,33(21):E768−E777
19 Kirshblum S C,Burns S P,Biering-Sorensen F,Donovan W, Graves D E,Jha A,Johansen M,Jones L,Krassioukov A, Mulcahey M J,Schmidt-Read M,Waring W.International standards for neurological classifcation of spinal cord injury (revised 2011).The Journal of Spinal Cord Medicine,2011,34(6):535−546
20 Ye Chao-Qun,Xu Shao-Ting,Sun Tian-Sheng.Assessment for walking ability in patients with spinal cord injury.Chinese Journal of Spine and Spinal Cord,2007,17(10):785−787 (叶超群,胥少汀,孙天胜.脊髓损伤患者的步行功能评定.中国脊柱脊髓杂志,2007,17(10):785−787)
22 Lam T,Pauhl K,Ferguson A,Malik R N,Krassioukov A,Eng J J.Training with robot-applied resistance in people with motor-incomplete spinal cord injury:pilot study.Journal of Rehabilitation Research and Development,2015,52(1):113−129
23 Wirz M,Zemon D H,Rupp R,Scheel A,Colombo G,Dietz V,Hornby T G.Efectiveness of automated locomotor training in patients with chronic incomplete spinal cord injury:a multicenter trial.Archives of Physical Medicine and Rehabilitation,2005,86(4):672−680
24 Harkema S J.Neural plasticity after human spinal cord injury:application of locomotor training to the rehabilitation of walking.Neuroscientist,2001,7(5):455−468
25 Wu Zong-Yao.Robot and walking rehabilitation in patients with paraplegia.Chinese Journal of Physical Medicine and Rehabilitation,2011,33(8):624−629 (吴宗耀.机器人与截瘫患者的行走康复.中华物理医学与康复杂志2011,33(8):624−629)

林海丹重庆医科大学康复医学与理疗学专业博士研究生.2010年获四川大学硕士学位.主要研究方向为脊髓损伤的康复.E-mail:hopelam@126.com
(LIN Hai-DanPh.D.candidate in physical medicine and rehabilitation at Chongqing Medical University.She received her master degree from SichuanUniversity in 2010.Her main research interest is rehabilitation in spinal cord injury.)

张 韬湖南中医药大学康复治疗学本科生.重庆医科大学附属第一医院康复医学科物理治疗师.主要研究方向为步态分析及步行功能重建,动作分析技术.
E-mail:van_mozart@foxmail.com
(ZHANG TaoUndergraduate in rehabilitation therapy at Hunan University of Chinese Medicine and physical therapist in the Department of Rehabilitation Medicine, the First Afliated Hospital of Chongqing Medical University.His research interest covers gait analysis,reconstruction of walking function and motion analysis technology.)

陈 青重庆医科大学附属第一医院康复医学科医师.于2015年在重庆医科大学获得医学硕士学位.主要研究方向为脊髓损伤的康复,光动力疗法.
E-mail:cqcq20123634@163.com
(CHEN QingPhysician in the Department of Rehabilitation Medicine, the First Afliated Hospital of Chongqing Medical University.She received her master of medicine degree from the Chongqing Medical University in 2015.Her research interest covers rehabilitation in spinal cord injury and photodynamic therapy.)

李宏伟重庆医科大学附属第一医院康复医学科物理治疗师.于2014年在香港理工大学获得理学硕士学位.主要研究方向为运动损伤的预防及物理治疗.
E-mail:lhwlove@163.com
(LI Hong-WeiPhysicaltherapist in the Department of Rehabilitation Medicine,the First Afliated Hospital of Chongqing Medical University.He received his bachelor degree from the Hong Kong Polytechnic University in 2014. His research interest covers prevention and physiotherapy in sports injury.)

白定群医学博士,重庆医科大学附属第一医院康复医学科副主任医师.主要研究方向为脊髓损伤的康复.本文通信作者.
E-mail:baidingqun2014@163.com
(BAI Ding-QunDoctor of medicine,associate chief physician in the Department of Rehabilitation Medicine,the First Afliated Hospital of Chongqing Medical University.His main research interest is rehabilitation in spinal cord injury.Corresponding author of this paper.)
Efect of Robot-assisted Gait Training on Walking Ability in Patients with Incomplete Spinal Cord Injury
LIN Hai-Dan1ZHANG Tao1CHEN Qing1LI Hong-Wei1BAI Ding-Qun1
In order to determine the efect of robot-assisted gait training(RAGT)on walking ability in patients with incomplete spinal cord injury(ISCI),16 patients were randomly grouped into either the control group receiving conventional rehabilitation and over-ground training or the test group receiving conventional rehabilitation and RAGT.Low extremity motor score(LEMS)and walking index for spinal cord injury II(WISCI II)were evaluated before treatment and after 4-week,8-week and 12-week treatment,respectively.Both the LEMS in the two groups signifcantly increased after 4-week,8-week and 12-week treatment(P<0.05),but no signifcant diferences were found between the two groups (P>0.05).The WISCI II in control group were signifcantly improved after 4-week,8-week and 12-week treatment(P<0.05),while the values for WISCI II in test group were signifcantly improved after 8-week and 12-week treatment(P<0.05).But only after 12-week treatment,the WISCI II in test group was signifcantly greater than that in control group (P<0.05).In conclusion,RAGT might be not superior in improvement of muscle strength,but be superior in increase of walking ability when compared to over-ground training.
Robot-assisted gait training(RAGT),over-ground training,spinal cord injury(SCI),walking ability
林海丹,张韬,陈青,李宏伟,白定群.康复机器人辅助步行训练对不完全性脊髓损伤患者步行能力的影响.自动化学报,2016,42(12):1832−1838
Lin Hai-Dan,Zhang Tao,Chen Qing,Li Hong-Wei,Bai Ding-Qun.Efect of robot-assisted gait training on walking ability in patients with incomplete spinal cord injury.Acta Automatica Sinica,2016,42(12):1832−1838
2016-02-27 录用日期2016-08-15
Manuscript received February 27,2016;accepted August 15, 2016
重庆市集成示范计划项目(cstc2015jcsf10012)资助
Supported by Integrated Demonstration Project of Chongqing (cstc2015jcsf10012)
本文责任编委王卫群
Recommended by Associate Editor WANG Wei-Qun
1.重庆医科大学附属第一医院康复医学科重庆400016
1.Department of Rehabilitation Medicine,the First Afliated Hospital of Chongqing Medical University,Chongqing 400016
