一种面向步态和平衡康复训练的单绳悬吊主动减重系统设计与控制方法研究
2017-01-10于宁波杨卓孙玉波邹武林王喆
于宁波 杨卓 孙玉波 邹武林 王喆
一种面向步态和平衡康复训练的单绳悬吊主动减重系统设计与控制方法研究
于宁波1,2杨卓1,2孙玉波1,2邹武林1,2王喆1,2
针对患者神经损伤后发生的下肢运动障碍,减重步行训练是一种重要的康复训练方式.对于中度和轻度患者,为其提供部分身体重力支撑(Body weight support,BWS)并激励其自主行走,可以提高患者的主动参与,并有助于改善其步态和平衡控制能力,从而有望取得更好的康复效果.现有的减重技术多存在运动空间小、减重力变化大、会对患者产生前后和侧向拉力等问题.为此,本文面向步态和平衡康复训练应用,采用单绳悬吊方式,设计电机驱动的竖直拉力单元,从而构建了一种主动减重系统.在水平方向,采用桥式吊架结构,通过伺服控制消除吊绳偏摆使其保持竖直,从而避免对患者产生前后和侧向的拉力干扰.在竖直方向,只有一个控制自由度却需要完成位置随动和减重力控制两个目标,是典型的欠驱动系统.为此,采用绳牵引串联弹性驱动方法,将位置和吊绳拉力耦合起来.针对系统中存在的非线性、摩擦等不利因素,采用滑模控制方法,分别设计了吊绳偏角控制器和吊绳拉力控制器.为保证系统安全运行,进一步针对竖直拉力单元中的弹簧连接动板设计了位置控制器.最后,通过仿真实验检验了本文提出的主动减重系统和控制方案效果.由此,可为下肢运动障碍患者提供一种方便高效的康复训练手段.
康复训练,主动减重,绳驱动,串联弹性驱动,滑模控制
DOI10.16383/j.aas.2016.c160215
中风和脊髓损伤是导致下肢运动功能障碍的主要原因.医学研究表明,下肢康复训练可以帮助脊髓损伤患者恢复神经系统的功能,是治疗这类患者的重要手段之一[1−2].传统的康复训练主要由医疗人员和患者家属帮助完成,人力耗费高、工作强度大、效率比较低.近年来,机器人技术进入康复领域,可以提供长时间高强度的康复训练,并提供量化指标评价康复训练的进展和效果,已经成为康复训练的重要方式.瑞士苏黎世联邦理工学院开发的Lokomat[3],德国研制的GaitTrainer[4],已经成功商业化.国内中科院自动化研究所、上海大学、上海交通大学、国家康复辅具研究中心等单位,在下肢康复训练机器人方面开展了长期的研究,并取得了突出的成果[5−6].
要取得良好康复效果,患者自身的强烈意愿和积极参与至关重要,病人参与的主动性越高,训练的效果会越好.康复训练不仅要最大化训练的重复次数,也要最大化病人的主动努力,这是康复临床和康复工程领域最广为接受的原则之一[7−10].但是,在机器人辅助的康复训练中,机器人大多采用适应性控制算法为患者提供助力,这使患者有机会降低自己的主动努力,从而导致患者懈怠,产生惰性,降低康复效果[11].特别是对于中度和轻度神经损伤后有一定运动能力的患者,仅提供身体重力支撑的减重步行训练可以更加激发病人的主动参与,并有助于训练病人的步态和平衡控制能力,近年来得到了更多的重视.根据下肢康复训练的要求,减重系统应根据患者下肢损伤程度的不同提供合适的准确稳定的减重力,同时应避免对患者产生侧向拉力影响训练的步态[12].2011年,美国国立康复医院研发了基于单绳悬吊的ZeroG主动减重步行康复训练系统[13]. 2013年,瑞士苏黎世联邦理工学院研发了基于多绳悬吊的FLOAT系统[14].ZeroG系统和FLOAT系统的核心是为患者提供合适的身体重力支撑(Body weight support,BWS),患者被解放出来独立自主地去完成步行训练任务.这种方式充分调动了患者参与训练的主动性,有利于取得更好的康复效果.
绳索作为一种可靠的柔性传动介质,有着柔性传动振动小的特点,同时也可达到刚性传动的精度.同时,因为吊绳的运动惯量极低,患者和系统之间由运动产生的交互力可以忽略,从而能够实现很高的人机运动交互透明度.绳索的这些优点使绳索悬吊和基于绳牵引的驱动方法广泛应用到康复机器人、航天员训练等领域中[15−18].单绳悬吊主动减重系统ZeroG、多绳悬吊系统FLOAT、外骨骼下肢康复机器人系统LOPES[19],都采用了绳牵引的驱动方式.
基于绳索悬吊的减重技术,根据所采用的减重平衡机构的不同,可以分为被动减重和主动减重两类[20−21].被动减重采用配重块作为平衡机构,结构简单,技术难度低,但在实际康复训练中,配重块会随着患者竖直方向的运动而上下做非匀速运动,使得它提供给患者的减重力发生较大幅度的改变而造成减重效果失真,甚至会造成患者的非正常步态.针对这一问题,研究人员提出了主动减重技术,采用电机等可控制驱动源提供减重力,通过反馈实际的减重力对电机进行控制能够实现比较高的减重力控制精度.2013年,Lu等提出了利用加速度反馈将患者部分质量虚拟卸载的减重技术,有效补偿了训练过程中的动态载荷,使患者在康复训练过程中产生自己身体质量变轻的感觉[22].
现有的减重技术多存在运动空间小、减重力变化大、会对患者产生前后和侧向拉力等问题.为此,本文设计了一种基于单绳悬吊的主动减重系统.在水平方向,架空移动单元采用桥式吊架结构,可以扩大患者运动空间,并通过伺服控制保证患者运动过程中吊绳保持竖直,从而避免对患者产生前后和侧向的拉力.针对减重力变化大的问题,在竖直方向采用绳牵引串联弹性驱动结构,设计非线性滑模控制器,严格控制吊绳拉力.此外,为保证系统在安全范围内运行,针对竖直拉力单元中的弹簧连接动板设计了位置控制器.随后,通过仿真实验验证了本文主动减重系统和非线性控制器的可行性和有效性.
本文内容安排如下,第1节介绍主动减重系统的系统设计;第2节对第1节所设计的系统进行动力学建模;第3节基于第2节所建立的系统模型设计控制策略及控制器;第4节利用第2节的系统模型以及第3节的控制器在Matlab/Simulink平台搭建主动减重系统的仿真模型,进行仿真验证;第5节是文章的总结与展望;最后是介绍控制器具体设计过程的附录.
1 系统设计
1.1 系统整体方案
综合考虑下肢步态和平衡康复训练对主动减重系统的要求,本文提出了如图1所示的单绳悬吊主动减重系统.
主动减重系统主要由架空移动单元和竖直拉力单元组成.竖直拉力单元跟随患者竖直方面的运动并提供重力支撑,抵消患者的部分或者全部重力.架空移动单元使竖直拉力单元跟随患者水平方向的运动,从而使得吊绳的拉力始终沿着重力相反方向,竖直向上.此外,根据实际康复训练任务的需要,可以配备适当的人机连接单元,如万向架机构等.
根据本文所设计的系统整体方案,一方面,患者仅被提供减重支撑,可以从重力负担下解放出来,进而更加专注于步态和平衡,另一方面,所设计系统没有像外骨骼系统那样去干预患者的步态,患者必须自己主动地控制自己的步态和平衡.这都可以提高病人参与康复训练的主动性.
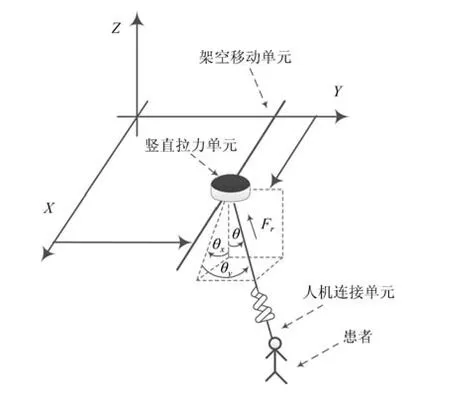
图1 主动减重系统原理图Fig.1 Principle of the active gravity ofoading system
1.2 基于串联弹性结构的绳索驱动单元
主动减重系统采用单绳悬吊提供重力支撑.但是,吊绳具有单边特性,只能承受单向拉力,不能承受压力.吊绳的这种特性,决定了当患者在竖直方向有较快速运动时其拉力会发生较大范围的变化,这为主动减重系统的设计和控制带来了极大的挑战.
近年来,串联弹性驱动方式(Series elastic actuation,SEA)因为其阻抗低、体积小、能量密度高、力输出稳定、力控制精度高以及对外部冲击载荷可以很好地缓冲等优点,被广泛应用在机器人领域[23−24].由此,可以通过图2所示的方式将串联弹性驱动结构应用到基于单绳悬吊的竖直拉力单元.
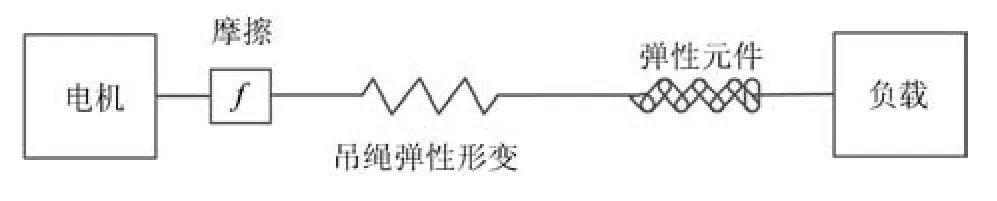
图2 基于串联弹性结构的绳索驱动拉力单元示意图Fig.2 Illustration of the cable actuation unit with the SEA structure
通过给吊绳串联弹性元件形成的串联弹性驱动为绳驱动提供了柔顺性,可以实现竖直拉力单元精确稳定的力输出控制.同时,基于串联弹性结构的绳驱动单元,将电机惯量与输出相解耦,力控制的鲁棒性高,显著降低了摩擦的影响,安全性好,适合主动减重系统的应用.
弹性元件的使用带来许多好处的同时也带来了一些不利的因素,最主要的是降低了系统带宽,元件弹性系数越低,系统带宽就越低.考虑实际的应用情况,患者由于运动功能的障碍在康复训练时与系统的交互频率必定较低,因此,若非刚度非常低,一般刚度的弹性元件所带来的带宽损失对本系统在康复训练中应用效果的影响并不显著.
1.3 系统搭建
根据图1的系统方案,主动减重系统的机械设计方案如图3所示.
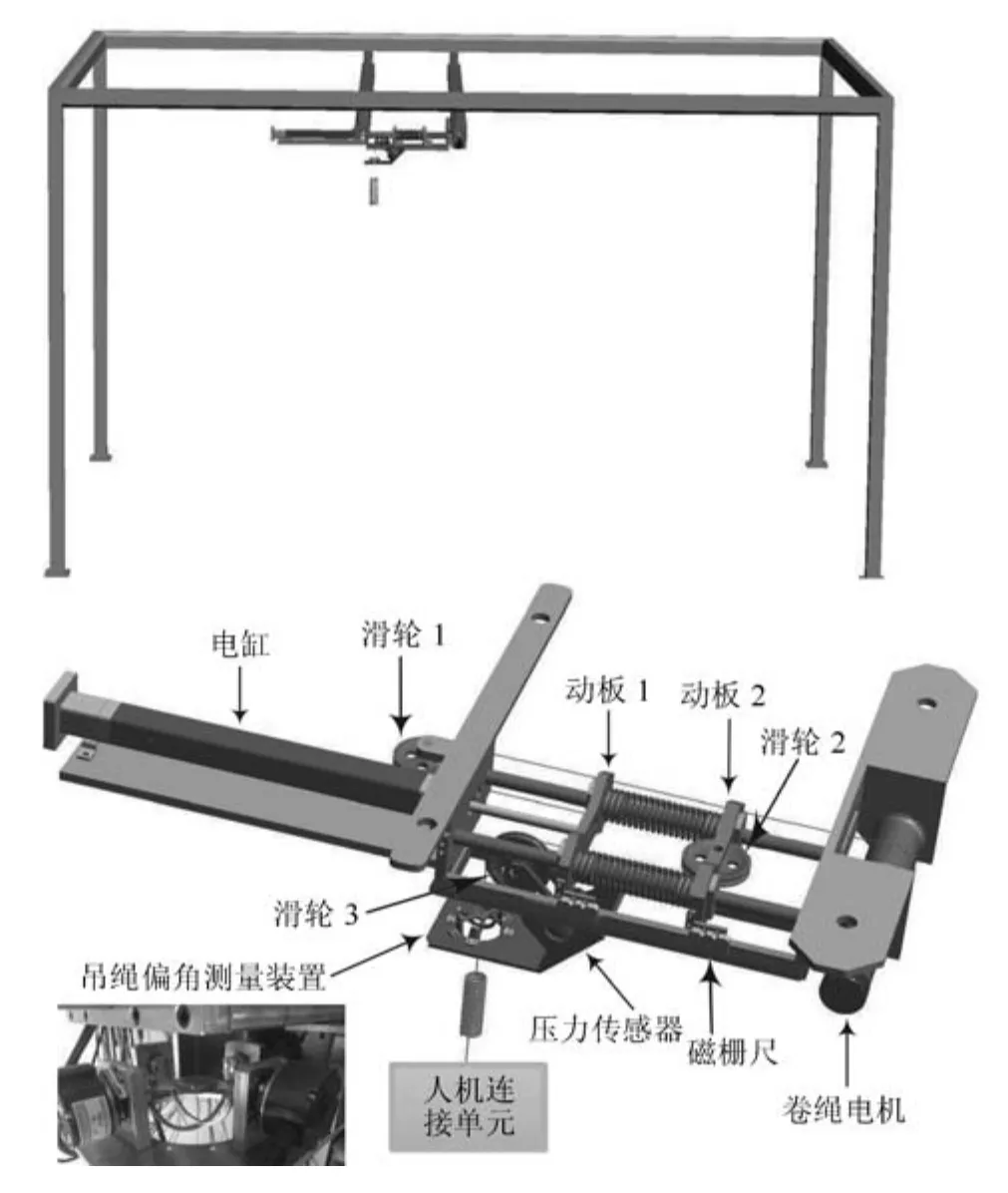
图3 主动减重系统的机械设计图(上:系统的总体设计图;下:竖直拉力单元的机构设计图)Fig.3 Mechanical design of the active gravity ofoading system(Top:the overall system;Bottom:the body weight support unit)
架空移动单元采用桥式吊架结构,其中,吊架长度和宽度均可以根据实际情况进行调整,既可以调节患者在水平方向的运动范围.在空间比较有限时,可以缩短吊架的长和宽从而使系统结构紧凑,从而可以配合跑步机进行部署;在空间比较宽阔时,可以适当增加吊架的长和宽,在前向和侧向为病人提供较大的运动空间.利用电机伺服控制技术,装备两个角度传感器,检测吊绳相对竖直方向的偏移角度,通过水平方向的2台交流电机驱动竖直拉力单元动态实时跟踪患者在X和Y方向的位置,保持吊绳竖直.
竖直拉力单元的设计关系到主动减重系统的减重力控制精度,是整个系统的关键.吊绳从卷绳电机出发,经过滑轮1、滑轮2、滑轮3和吊绳偏角测量装置,最终通过人机连接单元与患者相连.
人机连接单元是减重系统的重要组成部分.在本文系统中,可采用文献中基于单绳或多绳悬吊减重系统中的人机连接单元.如文献[14]中的人机连接单元,可在简化为单绳悬吊后应用到本文系统中.
吊绳偏角测量装置主要由两个轻质摆架及分别安装在摆架末端的两个编码器组成.两个半圆弧形的轻质摆架可以绕各自的旋转轴转动,这两个旋转轴都位于平行于水平面的同一平面内,且相互垂直.轻质摆架转动时带动安装在其上的编码器转动,进而测量出吊绳分别在X和Y方向的偏角.图3左下角是吊绳偏角测量装置的实物图.动板1和动板2通过轴承与两根轴相连,动板可以在轴上滑动.高精度磁栅尺用来测量动板1和动板2之间压簧的弹性形变.滑轮3与压力传感器连接在一起,通过压力传感器可以间接测量出吊绳上的拉力.电缸轴端与动板1安装在一起,电缸通过动板1压缩压簧.
竖直拉力单元通过电缸和卷绳电机对吊绳的拉力和位置进行控制.电缸通过动板1压缩压簧,压簧通过动板2和滑轮2将力作用在吊绳上,电缸从而可以被用来控制吊绳拉力.动板1和动板2由于患者竖直方向的运动会在轴上滑动,甚至会因此撞上吊架边框,造成系统损坏等不安全因素,卷绳电机可以通过在患者向下运动时放绳,在患者向上运动时卷绳补偿患者竖直方向上的运动,从而控制动板的位置,因此卷绳电机可以被用来将动板1和动板2的位置控制在安全的运动范围之内.
按照设计方案,加工制作了主动减重系统的技术验证平台,如图4所示.样机的长、宽、高分别为3.5m、2.5m、2m.在患者运动过程中,系统通过两个角度传感器测得吊绳偏角,进而通过水平方向的2台交流电机驱动竖直拉力单元动态实时跟踪患者在X和Y方向的位置,保持吊绳竖直,消除吊绳前后、侧向的干扰拉力.这样,患者可以在样机空间内以自然步态自由走动、转向、上下台阶.
2 系统建模与分析
2.1 系统建模
图5为系统整体工作原理框图.Cθ,Cf和Cx三个控制器,分别控制吊绳保持竖直偏角为0,吊绳拉力竖直分量维持在给定值,图3中动板位置保持在设定安全范围.伺服电机,电缸和卷绳电机均工作在转矩模式.虽然它们也可以在位置控制模式下工作,但这样的话,电机和电缸所驱动的负载的信息将难以有效利用,系统控制性能受到限制.因此,在本文中电机和电缸均采用转矩控制,将其与负载统一进行动力学建模,从而可以实现更加精细的控制.
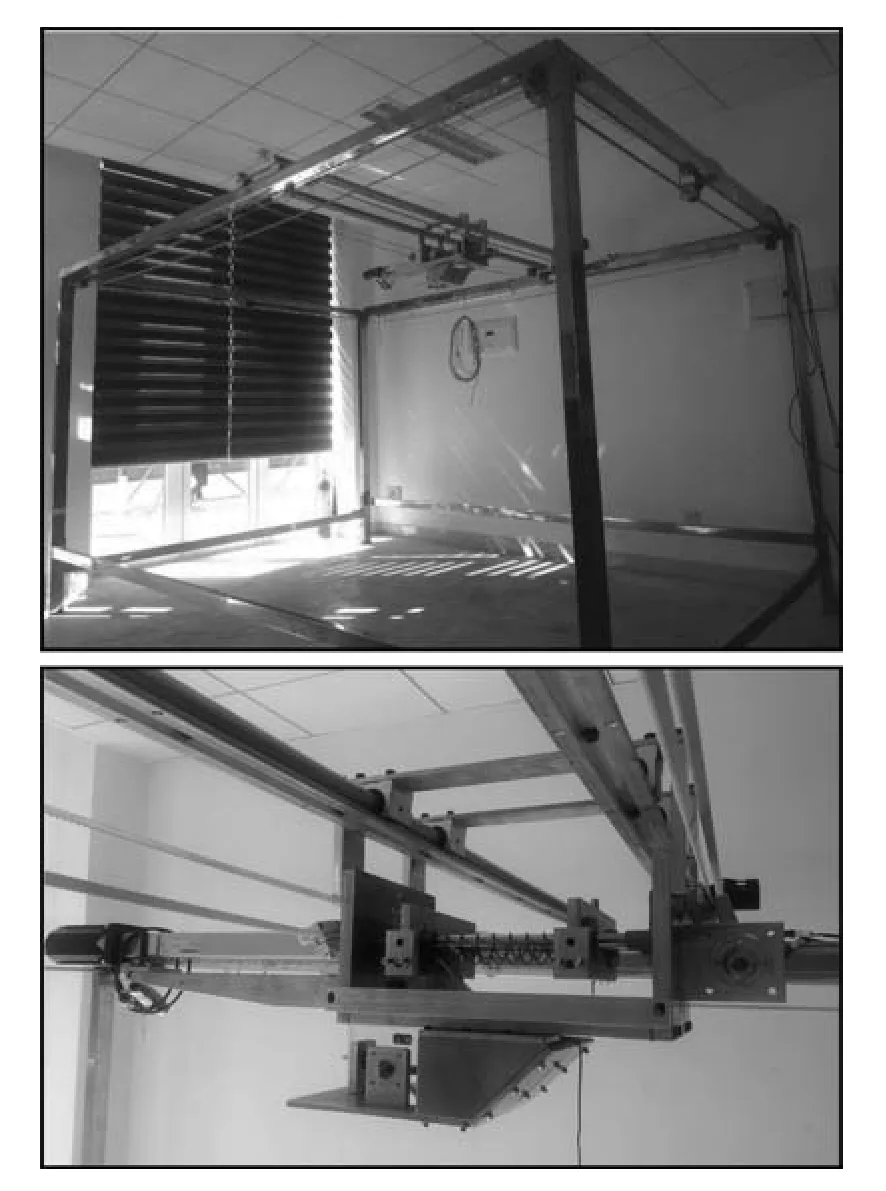
图4 主动减重系统的实验平台集成(上:总体系统;下:竖直拉力单元)Fig.4 The experimental platform for active gravity ofoading(Top:the overall system;Bottom:the body weight support unit)
Cθ通过伺服电机作用在架空移动单元上,架空移动单元在伺服电机和吊绳拉力水平分量的共同作用下产生位移x,架空移动单元和患者水平方向位置的差异经过函数p(···)的计算转换为吊绳偏角θ.在实际实验中,θ经由角度传感器测出并进行反馈.系统需要控制患者在竖直方向受到给定的减重力Fd,通过函数q(···)将这一指标转换为控制吊绳拉力为进而由控制器Cf进行控制.控制器Cf控制电缸作用在动板压簧单元上,动板压簧单元在电缸和吊绳的共同作用下,控制动板2的位移,患者在竖直方向的运动和卷绳电机的旋转共同影响拉簧,使其产生形变∆s2也即吊绳拉力Fr,在实际实验中吊绳拉力经由力传感器测出并进行反馈.图5中虚线框内结构,旨在控制动板位置保持安全范围之内,仅在必要时启动.启动后,控制器Cx开始工作,然后控制卷绳电机运动,吊绳在此作用下产生的拉力变化会通过动板压簧单元控制动板2的位置.在实际实验当中,动板2的位置经由位移传感器测出并进行反馈.
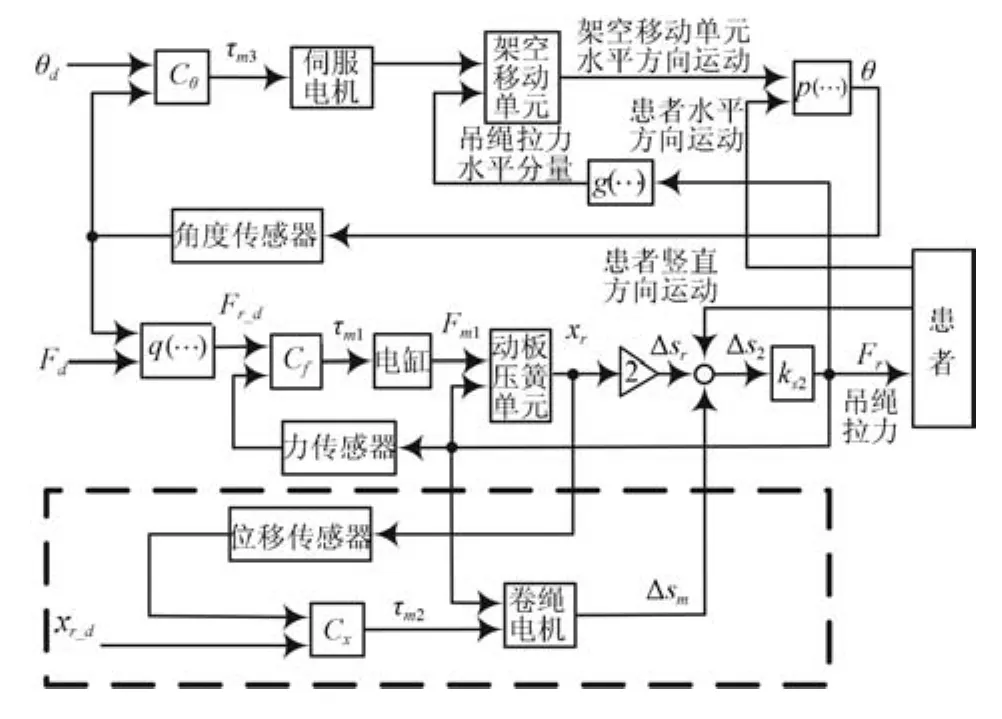
图5 主动减重系统工作原理框图(Cθ控制吊绳竖直;Cf在跟随吊绳竖直方向运动的同时,控制吊绳拉力;Cx在必要情况下开始工作,控制动板位置在安全的范围内)Fig.5 The working diagram of the active gravity ofoading system(Cθcontrols the cable to be perpendicular to the ground;Cfcontrols the cable force while following its motion;Cxworks in necessary conditions to control the moving plates stay within the safety range)
2.1.1 架空移动单元
本文所提出的系统需要跟随患者在三维空间内的运动.可以不失一般性将吊架跟随患者在X-Y水平面内的二维运动,简化到水平一维方向上,记为X方向.以吊架为研究对象

驱动吊架运动的电机的转动方程为

将式(1)代入式(2),可得

其中
fm3是电机施加给吊架的作用力,Fr是吊绳的拉力,θx是吊绳与X方向的夹角,fh是吊架在运动过程中所受到的阻力,M是吊架的质量,x是吊架沿X方向的位移,τm3是驱动吊架的电机的电磁转矩,R是同步轮的半径,j3是减速比,η3是驱动电机的传动效率,cm3是电缸的粘滞摩擦系数,Jm3是驱动电机的转动惯量,θ3是驱动电机旋转的角度.
2.1.2 动板压簧单元
以动板1为研究对象

电缸的转动方程为

其中
综合式(5)~(7),可得

以动板2为研究对象

fm1是电缸施加给动板1的作用力,Fs是压簧的弹力,fl是动板1运动过程中所受的阻力,ml是动板1的质量,xl是动板1的位移,τm1是电缸的电磁转矩,cm1是电缸的粘滞摩擦系数,Jm1是电缸的转动惯量,L是电缸的导程,η1是电缸的传动效率,θ1是电缸中电机的旋转角度,fr是动板2运动过程中所受的阻力,mr是动板2的质量,xr是动板2的位移.
2.1.3 卷绳电机运动方程
以卷绳电机为研究对象

其中,τm2是卷绳电机的电磁转矩,r是与卷绳电机相连的卷筒的半径,j2是卷绳电机的减速比,η2是卷绳电机的传动效率是吊绳运动过程中所受到的阻力,cm2是卷绳电机的粘滞摩擦系数,Jm2是卷绳电机的转动惯量,θ2是卷绳电机的旋转角度.
2.2 模型分析
通过图5可以看出,对动板位置的控制会与对吊绳拉力的控制形成耦合.在对动板的位置进行控制时,卷绳电机的运动会通过改变∆s2使吊绳拉力发生变化,而对吊绳拉力的控制也会影响动板2的位置.在不进行动板位置控制的情况下,系统可以很好地完成吊绳拉力的控制.加入动板位置控制后,系统不仅可将动板控制在安全运动范围内,还能提升吊绳拉力的控制性能,本文随后给出的仿真实验结果也验证了这一设计的可行性.除此之外,系统对吊绳拉力的控制与对吊绳偏角的控制也存在耦合.吊绳拉力的水平分量会影响架空移动单元的位移,进而影响吊绳偏角;在遵从控制患者竖直方向受到给定减重力的原则下,吊绳偏角的存在会实时改变吊绳拉力的控制目标.吊绳拉力控制和吊绳偏角控制之间耦合作用的强弱取决于吊绳偏角值的大小.吊绳拉力控制和吊绳偏角控制之间耦合作用的强弱取决于吊绳偏角值的大小.本文的控制目标之一是保持吊绳竖直,即偏角为0.当吊绳偏角维持在0附近的一个微小邻域内时,吊绳拉力和偏角控制之间的耦合作用十分有限,可以忽略.
考虑实际应用情况下,一个质量为m的患者需要的减重力如下式所示:

其中,c为减重系数,范围为[0,1].此时由于吊绳偏角的存在,患者将受到下式所计算出来的侧向牵引力

对于损伤比较大的患者,需要提供比较大的减重力.考虑一个质量为70kg的患者,当c比较大时,如c=0.85时,需要减重大约600N.此时,由于大的减重力,小的偏角θx也会使患者受到很大的侧向牵引力.例如,当偏角为5°时,侧向牵引力Flat大约为52N.这将造成极大的不安全因素.从实验安全性分析,需要高性能的吊绳偏角控制器将吊绳偏角控制在一个很小的范围之内.
考虑允许侧向牵引力最大为Flatm,则所允许的最大偏角可由下计算得出
在实际实验中,为了确保安全,当吊绳偏角超出[−θmax,θmax]的范围之后,应使系统急停.
本文所设计的减重系统意在为不同患者或同一患者不同时期的康复训练提供合适的减重力,在训练前应将绳索预紧到当次训练的目标减重值.在绳索预紧过程中,预紧力由零上升到当次训练的目标减重值.本文采用基于绳牵引的串联弹性驱动,将吊绳位置和吊绳拉力耦合,因此绳索上的力不会突变.暂定的减重系数为10~90%,一方面,保证安全,不会把病人吊起来悬空,另一方面,保证绳索通过弹簧一直处于张紧状态.从实验安全性分析,当吊绳拉力超出控制给定范围后也应使系统急停.
3 控制器设计
系统的控制目标,是将吊绳拉力在竖直方向的分力Fd维持在给定值,与此同时控制吊绳竖直亦即θ=0.此外,由于机械结构的空间限制,需要防止动板因为患者竖直方向大幅度的运动而与吊架相撞,即控制动板在一个安全的范围内运动.
从系统的动力学模型中可以看出,系统中存在弹簧弹力和摩擦阻力等难以精确建模的非线性项.对于这种具有不确定动态特性的非线性系统而言,滑模控制是一种强有力的控制方法,它对模型要求较低,闭环系统对于干扰信号以及控制对象本身的摄动具有较强的鲁棒性[25−27],非常适合本文系统使用.本文所设计的滑模控制器均为基于趋近律的滑模控制器.
3.1 吊绳偏角控制器设计
将吊绳控制在竖直方向可以避免吊绳给患者提供不利的侧向牵引力.不失一般性,先研究吊绳夹角在X方向的控制,然后推广到整个水平面上.
图6是吊绳偏角的控制结构图.吊绳实际偏角与期望偏角的偏差可以通过函数h(···)转化为吊架位置与患者位置在X方向的偏差ex进行控制.滑模控制器Cs1的输入为位置偏差ex,输出为驱动电机的目标电磁转矩τm3,电机采用转矩控制.架空移动单元在电机的驱动力以及吊绳拉力的水平分量等的共同作用下运动,其位移x与患者水平方向位移xp的偏差所引起的吊绳偏角经由角度传感器测出并进行反馈.值得说明的是,在滑模控制器的设计过程中考虑了电机模型,滑模控制器的详细设计过程,可参考附录A1.1.
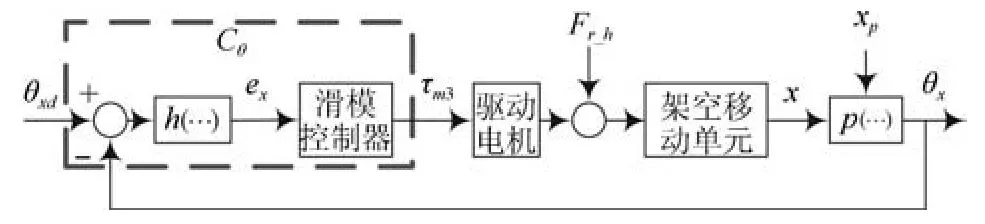
图6 吊绳偏角控制结构图Fig.6 The control diagram for the cable deviation angle
3.2 吊绳拉力控制器设计
吊绳拉力的控制是整个系统的重中之重,通过图7所示的控制结构对吊绳拉力进行控制.考虑到吊绳偏角的影响,设定吊绳拉力目标值为

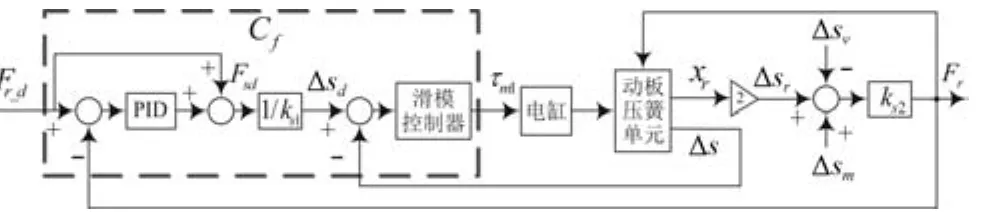
图7 吊绳拉力控制结构图Fig.7 The control diagram for the cable force
本文中的竖直拉力单元使用电缸同时控制吊绳的拉力和位置,是欠驱动系统.通过在吊绳上串入一个弹性元件,可以将吊绳的拉力和位置耦合起来,将吊绳拉力与位置的复合控制转化为对串入拉簧的形变量的控制.
主要通过控制压簧的弹力来间接控制吊绳的拉力,从系统动力学方程(9)可以看出,压簧的弹力和吊绳的拉力并不严格相等,为了弥补它们之间的偏差设计专门的PID(Proportion integration diferentiation)控制器进行补偿.实际吊绳的拉力经由压力传感器测出,它与目标值之间的误差经过PID控制器后再加上目标值产生压簧弹力的参考输入Fsd,压簧弹力的参考输入通过弹性系数ks1转化为压簧形变的参考输入∆sd.滑模控制器以压簧形变的误差为输入,电缸的目标电磁转矩τm1为输出,电缸采用转矩控制,进而控制压簧形变快速准确地到达给定值,在此过程中动板压簧单元内动板2的运动使吊绳上串联的拉簧产生形变∆sr,在这一个控制周期内∆sr与由于患者在竖直方向上的运动而使拉簧产生的形变∆sv和由于卷绳电机的作用而使拉簧产生的形变∆sm共同作用产生拉簧最终的形变∆s2.在设计滑模控制器的过程中也考虑了电缸模型.滑模控制器的详细设计过程,可参考附录A1.2.
3.3 动板位置控制器设计
患者在竖直方向运动幅度较大时,动板可能会超出其安全范围.因此,有必要对动板的位置加以控制.因为压簧的形变范围有限,故可以将动板2控制在某一固定位置,从而动板1也会处于安全运动范围之内.图8是动板2位置的控制结构图.
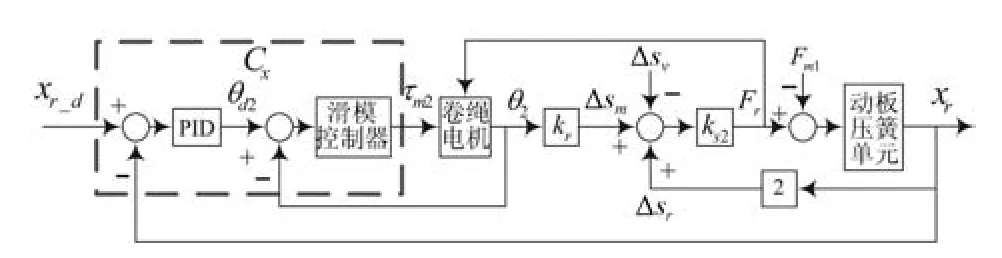
图8 动板2位置控制结构图Fig.8 The control diagram for the moving plate 2
4 仿真实验和结果
4.1 仿真实验设定
在Matlab/Simulink平台搭建主动减重系统的仿真模型,通过仿真实验检验控制器的效果.
假设患者的质量为70kg,计划为其减重85%,大约600N.仿真参数如表1所示.
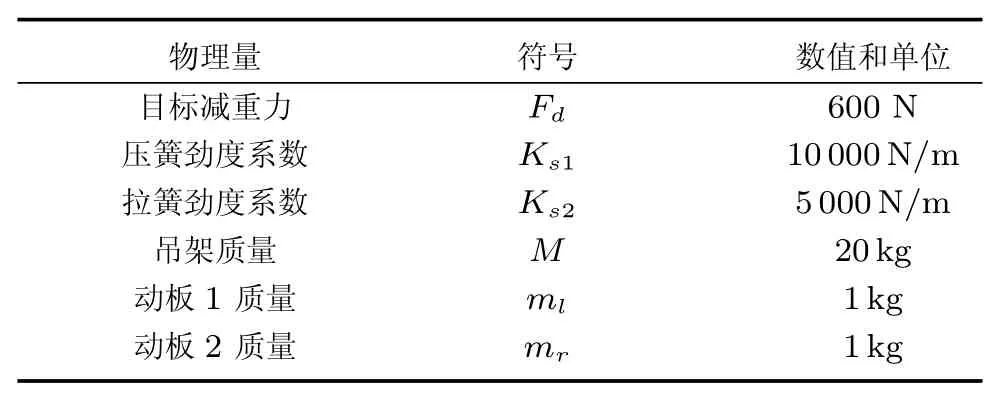
表1 仿真实验参数列表Table 1 List of simulation parameters
仿真模型按图5搭建,使用前文中所建立的系统动力学模型,模型中考虑了摩擦阻力以及电机的饱和约束.所用摩擦力模型具体如下

其中,d代表物体相对运动过程中所受到的摩擦力,z和k为相关系数.da代表物体所受到的阻力,涵盖有相对运动和无相对运动两种情况.T是驱动器的电磁转矩,l是一个足够小的常数.
在患者康复训练过程中,患者的人体动力学交互因素所产生的影响最终反映为拉簧形变量的变化,因此可以将位置信号作为系统输入进行仿真.
仿真实验主要模拟了三种代表性的实际实验,分别是:用阶跃信号模拟系统的预张紧阶段;用斜坡信号模拟患者蹲下和站起的动作;用复合信号模拟患者步行.
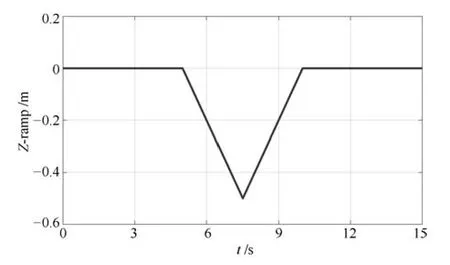
图9 患者蹲下和站起时竖直方向位置变化曲线Fig.9 The vertical position of the subject when crouching and standing up
设定患者步行,在X方向的运动可设定为斜坡信号和正弦信号的叠加,斜坡信号的斜率为0.7m/s,而正弦信号的幅值为0.08m,频率为1.2Hz.在竖直方向的运动为正弦信号,幅值为0.04m,频率与X方向相同,为1.2Hz.图9是用斜坡信号模拟患者蹲下和站起时患者竖直方向位置的变化曲线.图10是用复合信号模拟的患者步行时竖直方向和水平方向位置变化曲线.
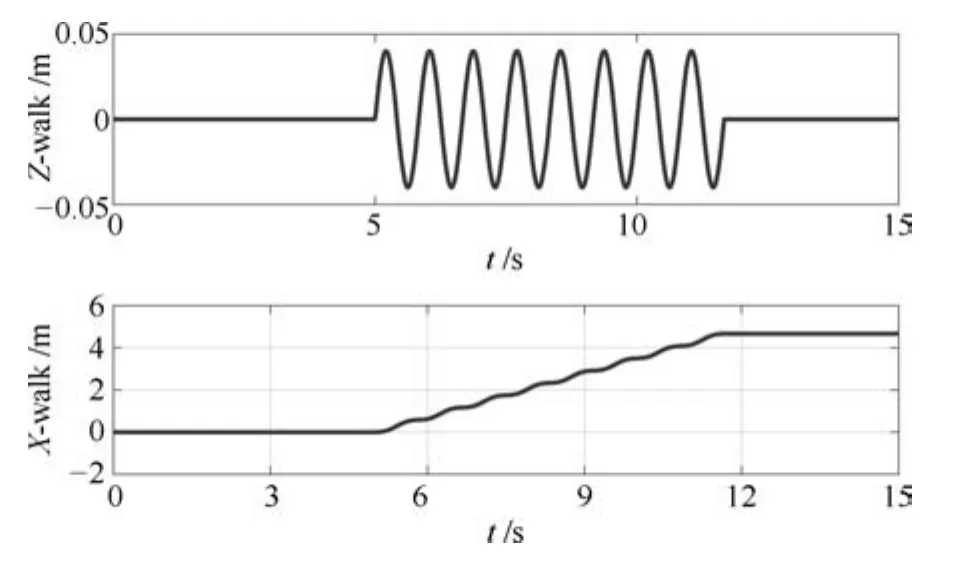
图10 患者步行时竖直方向和水平方向位置变化曲线Fig.10 The horizontal and vertical position of the subject during ground walking
采用模拟信号的一个优点,是便于分析系统的特性和控制效果.我们基于采集的人在自然状态下行走时的运动数据进行了仿真,也取得了良好效果.
4.2 实验结果与分析
4.2.1 吊绳偏角控制
图11展示了系统对吊绳偏角的控制效果.
从图11中可以看出,在患者步行过程中,通过设计的滑模控制器,系统始终将吊绳偏角控制在一个极小的范围之内.
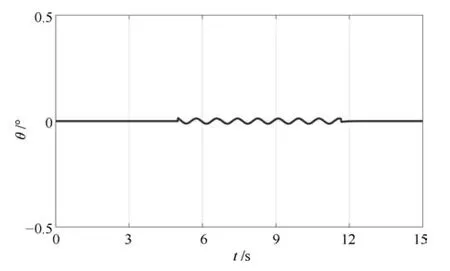
图11 步行信号下吊绳偏角变化曲线Fig.11 The deviation angle during ground walking
4.2.2 吊绳拉力控制
图12~图14展示了系统的减重力控制效果.值得说明的是,在使用斜坡信号和复合信号模拟患者蹲起和步行动作时,都有5s的准备时间,这段时间让系统张紧到600N附近,随后患者进行训练,因此图13和图14并不从t=0s时开始绘制.
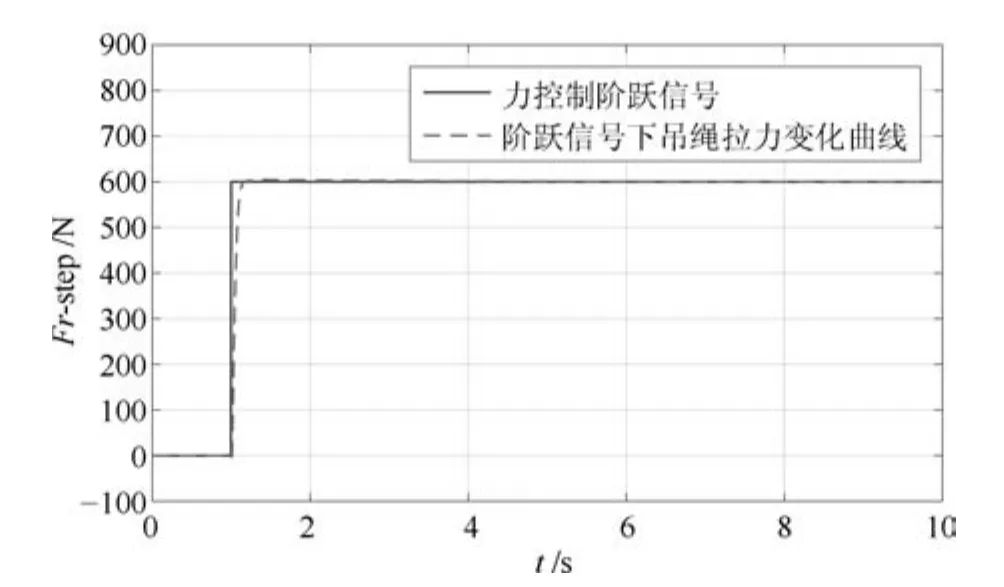
图12 阶跃信号下吊绳拉力变化曲线Fig.12 The cable force response to a step signal
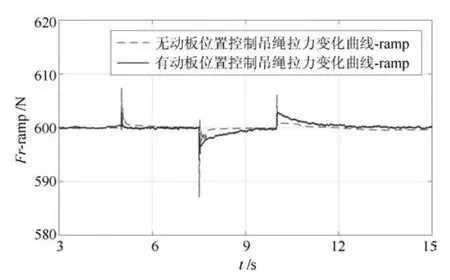
图13 斜坡信号下吊绳拉力变化曲线Fig.13 The cable force response to a ramp signal
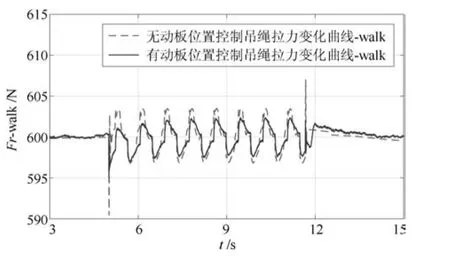
图14 步行信号下吊绳拉力竖直方向分力变化曲线Fig.14 The vertical cable force during a ground walking signal
从图12可以看出,用阶跃信号模拟系统预张紧,吊绳拉力会快速达到目标值,稳态误差极小.图13表明,系统在患者竖直方向大幅快速运动情况下仍然具有良好的力控制性能.图14表明在患者步行时系统可以提供稳定精确的减重力.加入动板位置的控制后,减重力变化范围不会超过±2.5N.图13和图14不仅表明系统具有良好的力控制性能,也表明加入动板位置的实时控制会给吊绳拉力控制性能带来一定程度的提升.
4.2.3 动板位置控制
图15~图17展示了系统对动板位置的控制效果.可以看出,相对于没有动板位置控制,本文所设计的动板位置控制器可以将动板位置控制在一个更小的范围内,使系统工作起来更加安全.
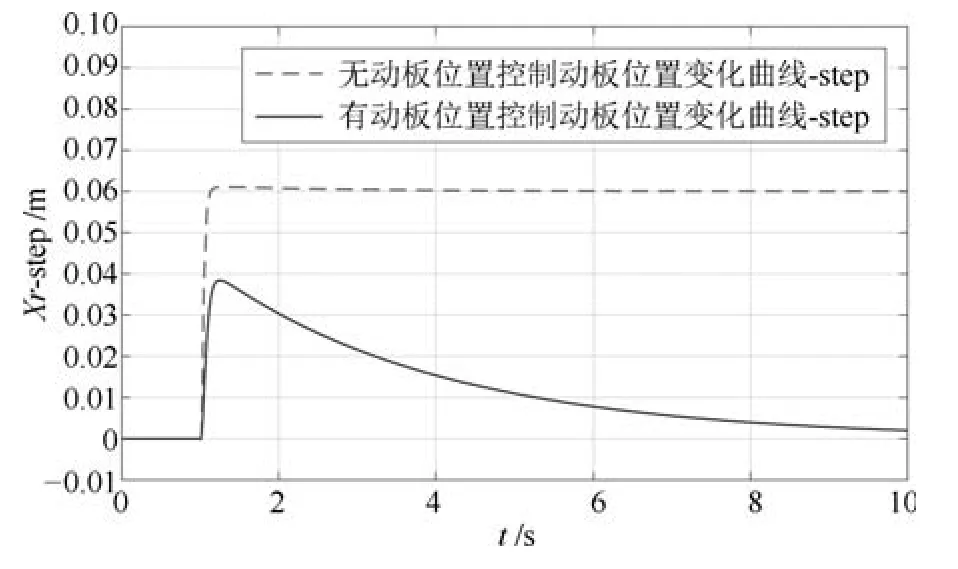
图15 阶跃信号下动板2位置变化曲线Fig.15 The position of the moving plate 2 during a step signal
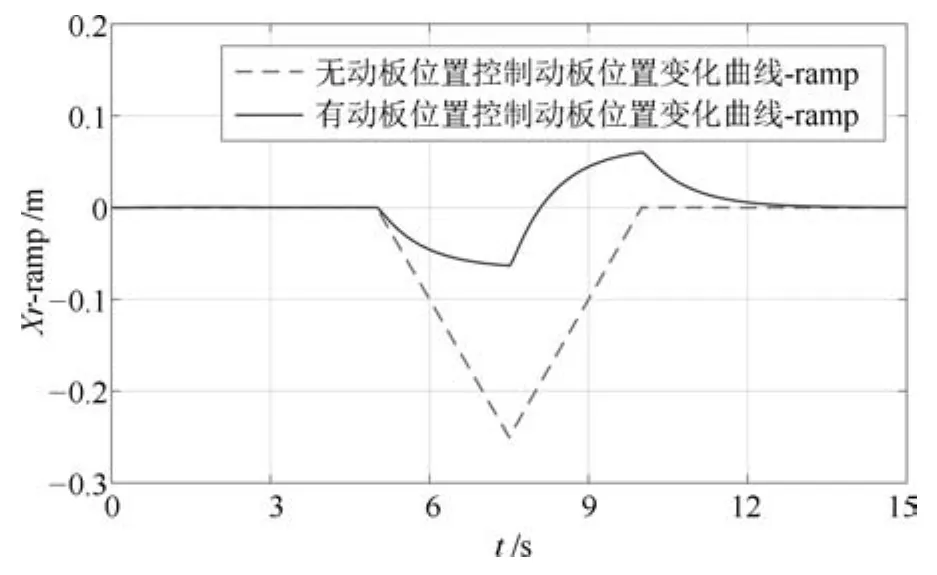
图16 斜坡信号下动板2位置变化曲线Fig.16 The position of the moving plate 2 during a ramp signal
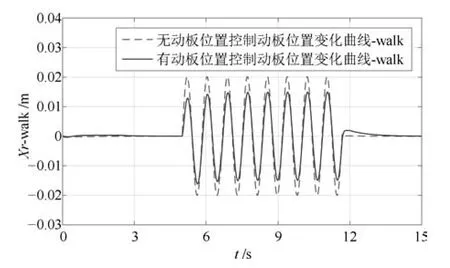
图17 步行信号下动板2位置变化曲线Fig.17 The position of the moving plate 2 during a ground walking signal
特别要指出的是,图16展示了在患者竖直方向快速大幅运动这种较极端情况下动板2位置的变化情况.无动板位置控制时,动板2在仿真实验过程中会移动−0.25m左右,超出了动板的安全运动范围,会与吊架边框相撞.加入动板位置控制后,动板2在整个仿真过程中最大单向位移不超过0.07m,始终处在安全的运动范围内.
5 结论与展望
本文面向步态和平衡康复训练需要,设计了一种单绳悬吊的主动减重系统.水平方向采用桥式吊架结构,吊架长度和宽度可调,可以为患者在前向和侧向提供较大的运动空间,同时通过伺服控制器控制吊绳保持垂直状态,从而对患者提供身体重力支撑并避免了前后和侧向的拉力干扰.在竖直方向,只有一个控制自由度却需要完成位置随动和减重力控制两个目标.为此,采用绳牵引串联弹性驱动方法,将位置和力耦合,解决了这一欠驱动难题.然后,针对系统中存在的非线性、摩擦、不确定性等因素,采用滑模控制方法,分别设计了吊绳偏角控制器和吊绳拉力控制器.为保证系统在安全范围内运行,进一步针对竖直拉力单元中的弹簧连接动板设计了位置控制器.仿真实验充分验证了本文提出的主动减重系统和非线性控制器的可行性和有效性.
在本文系统所采用的控制策略中,吊绳拉力控制和动板位置控制之间存在耦合关系,仿真实验结果证明针对两者所分别设计的控制方法能够实现良好的控制效果,并且动板位置控制对吊绳拉力控制的效果有一定的提升,但这些结果还需要实际实验的验证.本文设计的主动减重系统硬件平台已经基本搭建完成,正在开展部分单元的调试工作.未来将把本文的控制算法应用在实验平台上,验证系统的实际性能,并开展临床应用研究.
附录A滑模控制器设计
本附录中给出本文所采用的三个滑模控制器的具体设计方法.
A1.1第3.1节中滑模控制器具体设计
记在X方向患者位置与吊架位置的偏差为ex,则

其中,xd是吊架位置的目标值,也即患者在X方向的位置,x是吊架在X方向的位置.控制器的设计目标是使ex趋于零.系统为二阶系统,可引入下式所示线性滤波器进行降阶

根据线性滤波器性质,如果r3指数收敛于零,则ex也指数收敛.因此,可设计控制器使r3指数收敛.将上式两边微分得:

将式(3)代入上式,整理可得:
实际系统中,吊绳拉力测量存在误差,故可将Fr视为不完全确定建模项,并满足|∆Fr|≤∆Frmax,∆Fr表示吊绳拉力测量的误差,∆Frmax∈R+表示吊绳拉力测量误差的已知上界.同时,吊架运动过程中的阻力fh难以精确建模,也视为不完全确定项,并且|fh|≤fhmax,fhmax∈R+表示阻力值的已知上界.由此,可将式(A4)改写为

其中,f(t)是包含Fr和fh的不确定函数,且存在已知的正定函数ρ3,满足

根据上述系统动态方程,设计滑模控制如下[28]:
其中,kr3>0.ρ3在满足上式条件下越小越好.在本文系统中,可令

其中,φ由式(4)给出.此时,将式(A7)代入式(A4)并简化后得

对于上述闭环系统,选择Lyapunov候选函数为

则有



所以,V指数收敛,从而偏差ex指数收敛.
A1.2第3.2节中滑模控制器具体设计
此处滑模控制器沿用第3.1节中滑模控制器的设计思路,仅给出设计过程和结果.记压簧形变量的偏差为es,则

其中,∆sd是压簧形变的目标值,∆s是压簧形变的实际值,s0是压簧原长,xr是动板2的位置,xl是动板1的位置.引入下式所示线性滤波器进行降阶

将上式两边微分得:

将式(8)和式(9)代入,并整理可得:
其中

实际系统中,压簧弹力Fs与其形变∆s之间不是完全的线性关系,存在非线性因素,故可将Fs视为不完全确定建模项,并满足|Fs|≤Fsmax,Fsmax∈R+表示压簧弹力值的已知上界.同时,动板运动过程中的阻力fr和fl难以精确建模,也视为不完全确定项,并满足|fr|≤frmax,frmax∈R+表示已知动板2运动过程中阻力上界,|fl|≤flmax,flmax∈R+表示已知动板1运动过程中阻力上界.由此,可令
其中,α由式(7)给出,mr为动板2质量.
A1.3第3.3节中滑模控制器具体设计
此处滑模控制器沿用第3.1节中滑模控制器的设计思路,仅给出设计过程和结果.记卷绳电机的目标旋转角度与实际旋转角度偏差为eθ2,则

其中,θd2是卷绳电机旋转角度的目标值,θ2是卷绳电机旋转角度的实际值.引入下式所示线性滤波器进行降阶

将上式两边微分得:

将式(10)代入上式,整理可得:
由此,完成了三个滑模控制器的设计和稳定性分析.
1 Chinese Medical Association,National Health and Family Planning Commission.Stroke Screening and Prevention Engineering Committee.Guidelines for stroke rehabilitation in China.Chinese Journal of Rehabilitation Theory and Practice,2012,18(4):301−318 (中华医学会神经病学分会神经康复学组,中华医学会神经病学分会脑血管病学组,卫生部脑卒中筛查与防治工程委员会办公室.中国脑卒中康复治疗指南.中国康复理论与实践,2012,18(4): 301−318)
2 Hu Jin,Hou Zeng-Guang,Chen Yi-Xiong,Zhang Feng, Wang Wei-Qun.Lower limb rehabilitation robots and interactive control methods.Acta Automatica Sinica,2014,40(11):2377−2390 (胡进,侯增广,陈翼雄,张峰,王卫群.下肢康复机器人及其交互控制方法.自动化学报,2014,40(11):2377−2390)
4 Werner C,von Frankenberg S,Treig T,Konrad M,Hesse S. Treadmill training with partial body weight support and an electromechanical gait trainer for restoration of gait in subacute stroke patients:a randomized crossover study.Stroke, 2002,33(12):2895−2901
5 Feng Zhi-Guo.On Exoskeleton Robot for Gait Rehabilitation[Ph.D.dissertation],Shanghai University,China,2009 (冯治国.步行康复训练助行腿机器人系统[博士学位论文],上海大学,中国,2009)
6 Rao Ling-Jun,Xie Le,Zhu Xiao-Biao.Research and design on lower exoskeleton rehabilitation robot.Machine Designand Research,2012,28(3):24−26 (饶玲军,谢叻,朱小标.下肢外骨骼行走康复机器人研究与设计.机械设计与研究,2012,28(3):24−26)
8 Patton J,Small S L,Zev Rymer W.Functional restoration for the stroke survivor:informing the eforts of engineers.Topics in Stroke Rehabilitation,2008,15(6):521−541
9 Winstein C J,Kay D B.Translating the science into practice:shaping rehabilitation practice to enhance recovery after brain damage.Progress in Brain Research,2015,218: 331−360
10 Bejarano N C,Maggioni S,De Rijcke L,Cifuentes C A, Reinkensmeyer D J.Robot-assisted rehabilitation therapy: recovery mechanisms and their implications for machine design.Emerging Therapies in Neurorehabilitation II.Berlin: Springer,2016.197−223
11 Klamroth-Marganska V,Blanco J,Campen K,Curt A,Dietz V,Ettlin T,Felder M,Fellinghauer B,Guidali M,Kollmar A,Luft A,Nef T,Schuster-Amft C,Stahel W,Riener R.Three-dimensional,task-specifc robot therapy of the arm after stroke:a multicentre,parallel-group randomised trial.The Lancet Neurology,2014,13(2):159−166
12 Wyss D,Bartenbach V,Pennycott A,Riener R,Vallery H. A body weight support system extension to control lateral forces:realization and validation.In:Proceedings of the 2014 IEEE International Conference on Robotics and Automation(ICRA).Hong Kong,China:IEEE,2014.328−332
13 Hidler J,Brennan D,Black I,Nichols D,Brady K,Nef T. ZeroG:Overground gait and balance training system.Journal of Rehabilitation Research&Development,2011,48(4): 287−298
14 Vallery H,Lutz P,von Zitzewitz J,Rauter G,Fritschi M, Everarts C,Ronsse R,Curt A,Bolliger M.Multidirectional transparent support for overground gait training.In:Proceedings of the 2013 IEEE International Conference on Rehabilitation Robotics(ICORR).Seattle,WA:IEEE,2013. 1−7
15 Jiang Lei.Design and Control of An Exoskeleton Robot for Upper Limbs Using Twisted String Actuator[Ph.D.dissertation],China University of Mining and Technology,Beijing, China,2014 (蒋磊.基于扭绳驱动的上肢外骨骼康复训练机器人设计与控制[博士学位论文],中国矿业大学(北京),中国,2014)
16 Liu Pan,Zhang Li-Xun,Wang Ke-Yi,Zhang Jin-Yu.Dynamic modeling and control of a wire-driven rehabilitation robot.Journal of Harbin Engineering University,2009,30(7):811−815 (刘攀,张立勋,王克义,张今瑜.绳索牵引康复机器人的动力学建模与控制.哈尔滨工程大学学报,2009,30(7):811−815)
17 Wang Qi-Shen,Li Ji-Ting.Friction compensation in cableconduit transmission system of hand rehabilitation robot.Robot,2014,36(1):1−7 (王启申,李继婷.手康复机器人钢丝绳-绳套传动系统中的摩擦补偿.机器人,2014,36(1):1−7)
18 Yu Ren-Tian,Fang Yue-Fa,Guo Sheng.Design and kinematic performance analysis of a cable-driven parallel mechanism for ankle rehabilitation.Robot,2015,37(1):53−62 (禹润田,方跃法,郭盛.绳驱动并联踝关节康复机构设计及运动性能分析.机器人,2015,37(1):53−62)
19 Veneman J F,Kruidhof R,Hekman E E,Ekkelenkamp R, van Asseldonk E H,van der Kooij H.Design and evaluation of the LOPES exoskeleton robot for interactive gait rehabilitation.IEEE Transactions on Neural Systems and Rehabilitation Engineering,2007,15(3):379−386
20 Pan Guo-Xin,Zhang Xiu-Feng,Li Jian.Research of the body weight support system for treadmill training robot in hemiplegia rehabilitation.Chinese Journal of Rehabilitation Medicine,2013,28(11):1041−1045 (潘国新,张秀峰,李剑.偏瘫步行康复训练机器人减重支撑系统的研究.中国康复医学杂志,2013,28(11):1041−1045)
21 Ma Guan-Po,Xu Xiu-Lin.The research status of body weight support system of lower limbs rehabilitation training.Chinese Journal of Medical Physics,2014,31(1): 4694−4698 (马关坡,徐秀林.下肢康复训练减重支撑系统的研究现状.中国医学物理学杂志,2014,31(1):4694−4698)
22 Lu Q,Liang J X,Qiao B,Ma O.A new active body weight support system capable of virtually ofoading partial body mass.IEEE/ASME Transactions on Mechatronics,2013,18(1):11−20
23 Veneman J F,Ekkelenkamp R,Kruidhof R,van der Helm F C T,van der Kooij H.A series elastic-and Bowdencable-based actuation system for use as torque actuator in exoskeleton-type robots.The International Journal of Robotics Research,2006,25(3):261−281
24 Vallery H,Veneman J,van Asseldonk E,Ekkelenkamp R, Buss M,van der Kooij H.Compliant actuation of rehabilitation robots.IEEE Robotics&Automation Magazine,2008,15(3):60−69
25 Ma Bo-Jun,Fang Yong-Chun,Xiao Xiao.A sliding adaptive controller design for uncertain nonlinear system.In:Proceedings of the 2005 China Intelligent Automation Conference.Qingdao:Chinese Association of Automation,2005. (马博军,方勇纯,肖潇.不确定非线性系统的滑模自适应控制器设计.见:2005年中国智能自动化会议论文集.青岛:中国自动化学会,2005.)
26 Liu Jin-Kun,Sun Fu-Chun.Research and development on theory and algorithms of sliding mode control.Control Theory&Applications,2007,24(3):407−418 (刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展.控制理论与应用,2007,24(3):407−418)
27 Fang Bin,Shen Lin-Yong,Zhang Ya-Nan,Qian Jin-Wu.Active control of body weight for gait training robot.Journal of Shanghai University(Natural Science),2011,17(6): 719−723 (方彬,沈林勇,章亚男,钱晋武.步行训练机器人主动减重控制方法.上海大学学报(自然科学版),2011,17(6):719−723)
28 Fang Yong-Chun,Lu Gui-Zhang.Nonlinear System Theory. Beijing:Tsinghua University Press,2009.82−87 (方勇纯,卢桂章.非线性系统理论.北京:清华大学出版社,2009. 82−87)

于宁波南开大学机器人与信息自动化研究所副教授.2011年于瑞士苏黎世联邦理工学院获博士学位.主要研究方向为康复和辅助机器人.本文通信作者.
E-mail:nyu@nankai.edu.cn
(YU Ning-BoAssociate professor at the Institute of Robotics and Automatic Information Systems,Nankai University.He received his Ph.D.degree from ETH Zrich in 2011.His research interest covers rehabilitation and assistive robotics.Corresponding author of this paper.)
杨 卓南开大学机器人与信息自动化研究所硕士研究生.2014年获南开大学计算机与控制工程学院学士学位.主要研究方向为下肢康复,非线性控制,串联弹性驱动.
E-mail:zhyangsw@outlook.com
(YANG ZhuoMaster student at the Institute of Robotics and Automatic Information Systems,Nankai University.He received his bachelor degree from the College of Computer and Control Engineering,Nankai University in 2014.His research interest covers low limb rehabilitation,nonlinear control, and series elastic actuator.)
孙玉波南开大学机器人与信息自动化研究所硕士研究生.2016年获南开大学计算机与控制工程学院学士学位.主要研究方向为康复和辅助机器人.
E-mail:tjsunyubo@outlook.com
(SUN Yu-BoMaster student at the Institute of Robotics and Automatic Information Systems,Nankai University. He received his bachelor degree from the College of Computer and Control Engineering,Nankai University in 2016. His research interest covers rehabilitation and assistive robotics.)

邹武林南开大学机器人与信息自动化研究所硕士研究生.2015年获南开大学计算机与控制工程学院学士学位.主要研究方向为物理性人机交互,串联弹性驱动.
E-mail:wlzou@mail.nankai.edu.cn
(ZOU Wu-LinMaster student at the Institute of Robotics and Automatic Information Systems,Nankai University.He received his bachelor degree from the College of Computer and Control Engineering,Nankai University in 2015.His research interest covers physical human-robot interaction and series elastic actuator.)

王 喆中国科学院自动化研究所硕士研究生.2016年获南开大学计算机与控制工程学院学士学位.主要研究方向为机器人控制.
E-mail:wangzhe94@foxmail.com
(WANG ZheMasterstudentat the Institute of Automation,Chinese Academy of Science.He received his bachelor degree from the College of Computer and Control Engineering,Nankai University in 2016.His main research interest is robotic control.)
Design and Control of An Active Gravity Ofoading System for Rehabilitation Training of Gait and Balance
YU Ning-Bo1,2YANG Zhuo1,2SUN Yu-Bo1,2ZOU Wu-Lin1,2WANG Zhe1,2
Gait training with body weight support(BWS)is an efective rehabilitation therapy for patients with neural disorders and locomotion difculties.For medium and mild patients,walking with BWS may encourage their active participations into locomotion training and balance control to improved functional recovery.However,current BWS technologies sufer from problems of limited movement space,force inaccuracy,undesired lateral force,etc.In this work, we propose an active gravity ofoading system for gait and balance training.The BWS force is provided with a single rope suspension.In the horizontalX-Yplane,the servo unit moves the BWS unit to follow the motion of the patient and keeps the rope perpendicular to the ground so that no lateral force is produced to disturb the patient.In the vertical direction,since there is only one control degree of freedom for position following inZ-direction and suspension force control along the cable the BWS is designed with a cable-driven series elastic actuation structure,which couples the force and displacement along the rope.To deal with nonlinearities,friction and uncertainties in the system,the sliding mode control method is taken for the rope defection angle controller and force controller.Further,to keep the system running inside a safety boundary,another position controller is designed for the moving plate that connects with the spring in the BWS unit.With extensive simulations experiments,feasibility and efcacy of the active gravity ofoading system are validated.This system promises an efective rehabilitation platform for patients with locomotion difculties.
Rehabilitation,active gravity ofoading,cable actuation,series elastic actuation,sliding mode control
于宁波,杨卓,孙玉波,邹武林,王喆.一种面向步态和平衡康复训练的单绳悬吊主动减重系统设计与控制方法研究.自动化学报,2016,42(12):1819−1831
Yu Ning-Bo,Yang Zhuo,Sun Yu-Bo,Zou Wu-Lin,Wang Zhe.Design and control of an active gravity ofoading system for rehabilitation training of gait and balance.Acta Automatica Sinica,2016,42(12):1819−1831
2016-03-01 录用日期2016-11-17
Manuscript received March 1,2016;accepted November 17, 2016
国家自然科学基金(61403215),中央高校基本科研业务费,天津市自然科学基金(13JCYBJC36600)资助
Supported by National Natural Science Foundation of China (61403215),Fundamental Research Funds for the Central Universities and Natural Science Foundation of Tianjin(13JCY-BJC36600)
本文责任编委王卫群
Recommended by Associate Editor WANG Wei-Qun
1.南开大学机器人与信息自动化研究所天津300353 2.南开大学天津市智能机器人技术重点实验室天津300353
1.Institute of Robotics and Automatic Information Systems, Nankai University,Tianjin 300353 2.Tianjin Key Laboratory of Intelligent Robotics,Nankai University,Tianjin 300353
