基于3-UPS/RRR的并联踝关节康复机构及其性能分析
2017-01-10李剑锋徐成辉陶春静季润李世才张兆晶
李剑锋 徐成辉 陶春静 季润 李世才 张兆晶
基于3-UPS/RRR的并联踝关节康复机构及其性能分析
李剑锋1,2徐成辉1,2陶春静3季润3李世才1,2张兆晶1,2
基于踝关节的生理解剖结构和运动特性分析,提出了一种适用于踝关节康复的3自由度3-UPS/RRR并联机构.该机构采用三个主动支链倾斜布置避开了机构的奇异位形,能满足踝关节康复运动需要,同时约束支链和动平台的设计使机构的转动中心与患者的踝关节转动中心重合.应用解析法得到了机构的位置反解,建立了速度雅可比矩阵和静力雅可比矩阵,求解了机构的工作空间.基于雅可比矩阵,仿真分析了机构的运动学性能和静力学性能.结果表明在规定的工作空间内机构具有良好的可操作性、运动灵活性、刚度特性和力矩传递性能.最后运用牛顿-欧拉法建立了机构的逆动力学方程,得到了驱动力、约束力与运动参数的关系,并给出了仿真实例.
踝关节康复,并联机构,约束支链,力矩传递性能,牛顿-欧拉法
DOI10.16383/j.aas.2016.c160144
踝关节是人体下肢的三大关节之一,是人体运动的重要枢纽和承重关节.在日常生活中,踝关节直接参与站立、跨步、跳跃等动作,并吸收来自地面的冲击,起到保护关节的作用[1].但无法回避的是,人类是由四足行走的人猿进化而来的,所以在进化成两足直立行走后,人类的足部关节存在着先天的缺陷.这种先天的缺陷使得人类的踝关节成为最容易受到损伤的人体关节之一.若踝关节损伤未得到及时、正确的治疗,受损伤的本体感觉系统会加重踝关节的不稳定状态,导致再次损伤的发生几率上升,甚至引起其他关节损伤,出现不良连锁反应[2−3].因此,踝关节损伤后,除了配合药物治疗,还应该进行康复训练,以提高康复效率,传统的康复训练由医务人员一对一进行,工作量大,效率比较低,所以随着康复机构的快速发展,相应的踝关节康复机构逐渐进入研究人员视野.踝关节康复机构的应用不仅可以提高康复训练工作效率,减轻医务人员的工作量,还有利于对康复效果进行评估,以此制定相应阶段的训练内容,具有良好的使用价值和应用前景.
目前,国内外有关踝关节康复机构的研究已取得了一定的成果.文献[4−5]中基于Stewart平台研制出六自由度的Rutgers踝关节康复系统,采用虚拟现实技术可实现人机交互,医生还可根据存储的康复数据指导训练,但该系统结构复杂,成本较高.文献[6]提出了由三条支链、一根中心支撑杆和上下平台组成的两转动自由度的踝关节康复机器人,采用冗余驱动来消除机构的奇异性,仅能完成踝关节背伸/跖屈和内翻/外翻康复运动.文献[7−8]分别讨论了3-RSS/S和3-SPS/S康复机构,这两种机构的共同点是采用中央约束球铰设计,使机构只有三个相互正交的转动自由度,满足踝关节康复运动需要,但是机构的转动中心与踝关节转动中心不重合,康复过程中需要小腿配合随动,一旦协调不一致,可能会对踝关节造成二次伤害.文献[9]采用三个转动轴线正交的转动副等效约束球铰,提出了一种3-RUS/RRR冗余驱动踝关节康复机构,使机构的转动中心与踝关节的转动中心重合,且机构具有良好的运动性能,但是机构采用冗余驱动,支链间易引起干涉.最后文献[10]提出了4-UP(Pe)S/S踝关节康复机构,其机构系统由简化为球副的踝关节和机械本体共同构成,能够实现以踝关节为转动中心的康复训练,但是需要踝关节承受限制三个移动产生的作用力,对康复效果不利.
综上所述,现有踝关节康复机构各有优点,但也存在不同程度的问题:机构自由度冗余或不足;机构转动中心与踝关节转动中心不重合;结构复杂、成本高等.所以设计出具有三维转动自由度且机构转动中心和踝关节转动中心重合,结构简单、使用方便的机构构型,是研究踝关节康复机构的重点.基于上述分析,本文提出了一种用于踝关节康复运动的3-UPS/RRR并联机构,该机构有三个方向的转动自由度,机构转动中心与踝关节转动中心重合.
1 踝关节运动分析和机构简介
1.1 踝关节的运动分析
踝关节由小腿的胫骨和腓骨的远端与脚上的距骨组成[11].踝关节日常运动的三种最基本的方式包括:背伸/跖屈、内翻/外翻和内收/外展,由于性别、年龄、身体状况的不同,踝关节的运动范围不尽相同.经过查阅资料[12]汇总得到,正常情况下踝关节的运动模式及其运动范围,如图1所示.
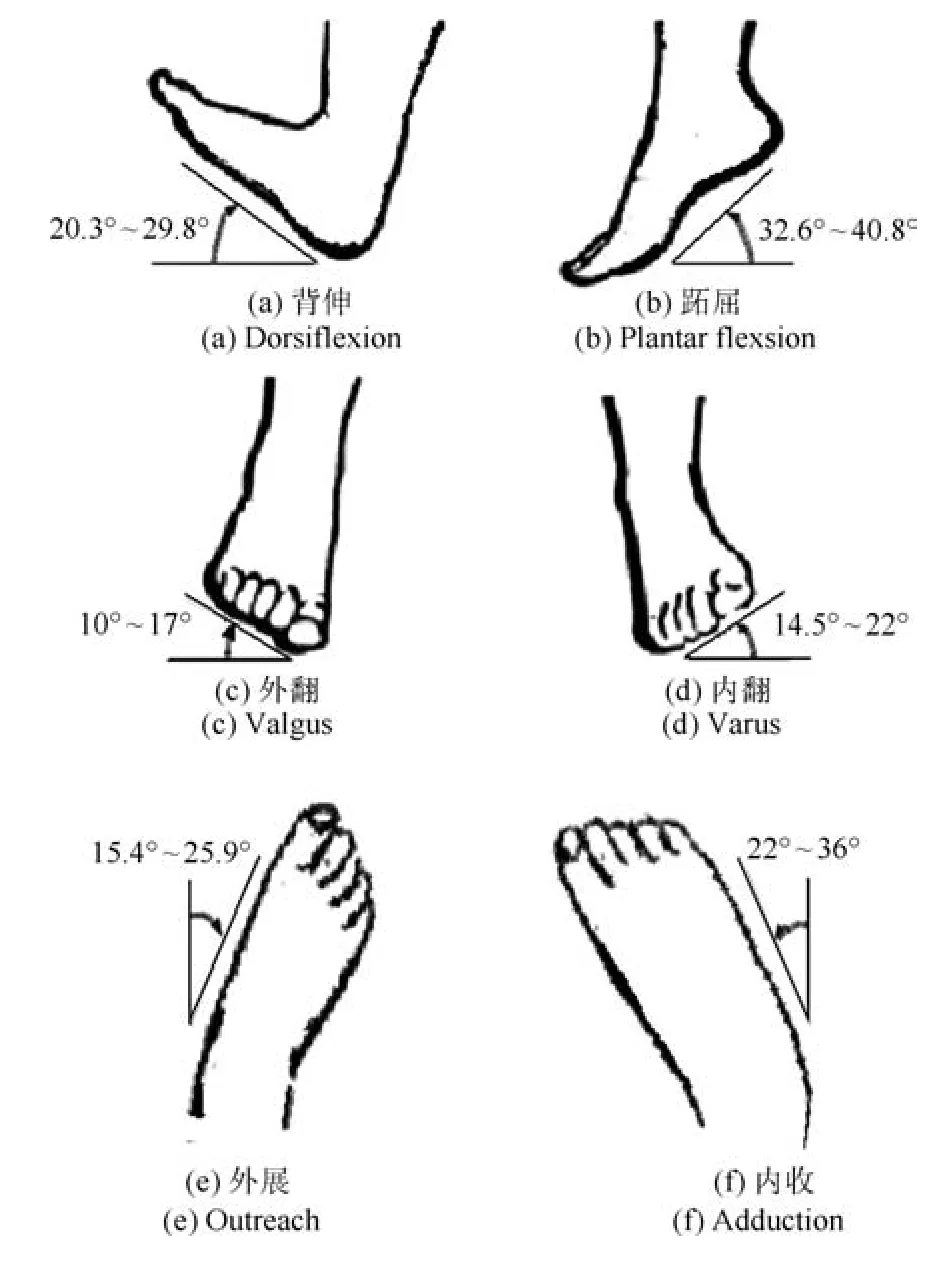
图1 踝关节运动模式及其运动范围Fig.1 Ankle movement patterns and their ranges of movement
根据上述踝关节运动形式及特点可知,可将踝关节的运动简化为绕三个垂直轴X、Y、Z的旋转运动[13],如图2所示.
由以上分析,所设计的踝关节康复机构在三个正交方向的最大转动角度须满足图1的要求,这是踝关节康复机构设计的基础.
1.2 机构简介
与串联机构相比,并联机构具有刚度大、运动精度高、惯性小、载荷分布均匀、结构对称且具有各向同性等特点,而且设计制造和控制成本相对较低.结合踝关节康复运动的特点及要求,将机构设计成并联形式要优于串联形式.如图3所示,一种基于3-UPS/RRR的并联踝关节康复机构由底座、动平台、三个并联支链和一个约束支链构成,约束支链由三个转动轴线相互正交的转动副R1R2R3(等效为球副)组成,轴线相交于一点,即为机构转动中心和踝关节转动中心重合的点.三个并联支链均是由一个虎克副、一个移动副和一个球副组成.
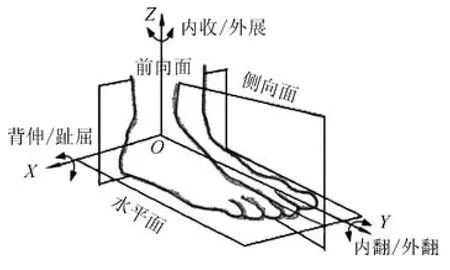
图2 脚踝运动Fig.2 Ankle joint movement
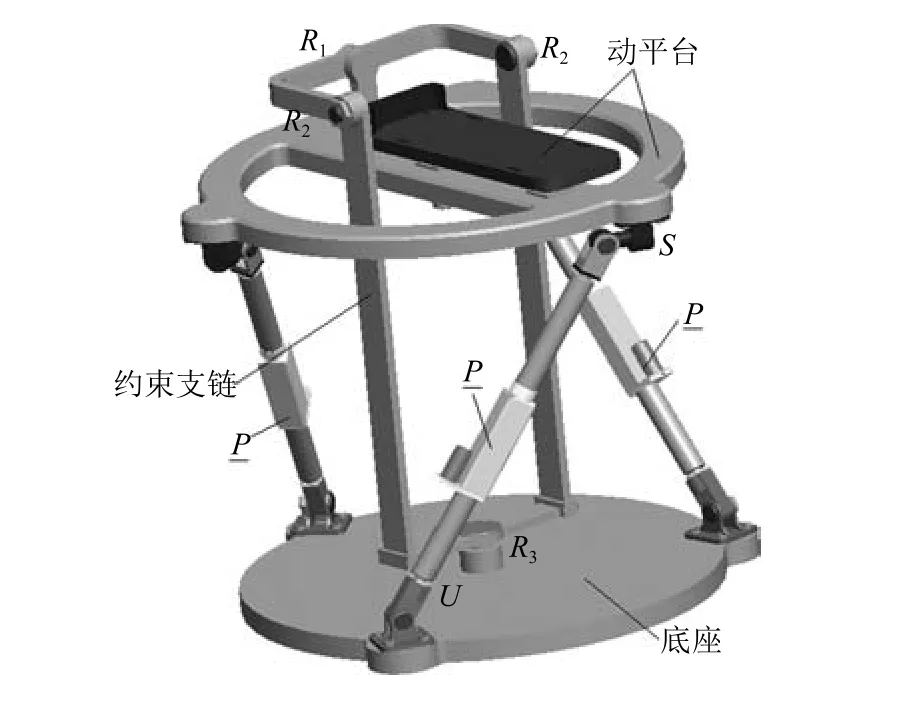
图3 并联踝关节康复机构模型Fig.3 The model of parallel mechanism for ankle rehabilitation
对于3-UPS/RRR三自由度并联机构,动平台运动过程中,当出现两个或三个主动支链相互平行时,不难发现此时机构处于奇异位形,表现为机构失去稳定,运动学、动力学性能瞬时发生突变,不能正常地传递运动和力.对于该奇异性问题,文献[14]提出通过约束或冗余驱动来消除奇异,文献[15−16]提出规划路径的方法来规避奇异位形.由于踝关节康复运动所需工作空间有限,故采取三个主动支链以相同倾斜角布置于动平台和底座之间来避开奇异位形.根据人脚的尺寸范围初步确定动平台和定平台底座圆盘的半径,同时考虑结构的紧凑性,设定两平台间的高度;通过改变动平台上均分点Ai的位置,定平台上均分点Bi位置不变,也即改变如图4中α的角度值,初选出工作空间大于图1中踝关节运动范围的α角度值;以可操作度小于5为目标函数,从初选的角度值中选取符合条件的位置,从而确定一个满足条件的较小的α角度范围,最后从该角度范围内选取较优的位置,即为最终Ai点的位置,文中选取的α角度值为72°.Ai点的位置确定后,支链的倾斜角也就确定了.工作过程中使用电机驱动这三条主动支链来实现机构的三个转动运动,机构没有冗余支链,结构相对简单且在一定的工作空间内减少了干涉的可能.
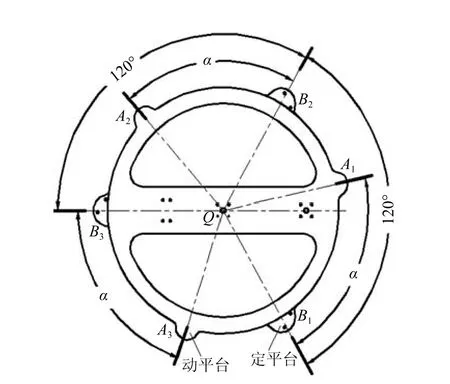
图4 动平台在定平台上投影图Fig.4 The projection of moving platform on the fxed platform
如图5所示,动平台由两部分组成:上平台和下平台.实际操作过程中,患者将脚置于上平台上进行康复训练,通过调节螺钉改变上下平台间的相对位置,通过连接螺栓调节挡板在上平台上的位置,这样就能保证患者踝关节的转动中心与机构的转动中心重合,同时可通过挡板与弹性绑带将脚绑缚在上平台上,避免在康复运动中,人脚与上平台出现较大的相对位移,造成不必要的损伤.此种设计不仅能改善人(踝关节)机(康复机构)之间的相容性,而且能使康复训练更加安全有效.
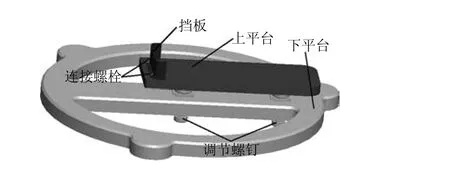
图5 动平台机构模型Fig.5 The moving platform mechanism mode
2 机构运动学分析
3-UPS/RRR并联踝关节康复机构的机构简图如图6所示.符号定义如下:定坐标系O-XbYbZb原点位于点O,动坐标系T-xtytzt原点位于旋转中心点T,定坐标系方向如图6中所示沿三个转动副轴线方向,初始位置时两坐标系方向一致,O与T重合.O′为轴Zb与底座的交点,Q为轴Zb与动平台的交点,QAi=O′Bi=d,OO′=L3,其中Ai、Bi、Si(i=1,2,3)分别为球副中心、虎克副中心和移动副的运动位移.初始状态下,虎克副的第一根轴线与Xb平行,第二根轴线与Yb平行.图中转动副R2、R1、R3的轴线正交于一点,可等效为一个连接动平台与定平台的球关节,转过的角度依次记为α、β、γ.
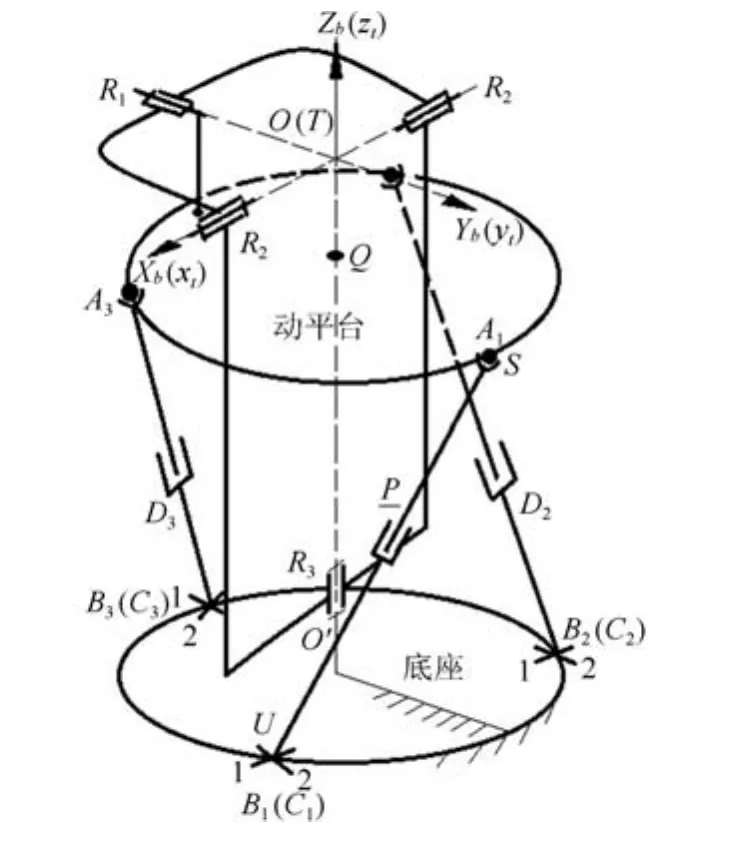
图6 3-UPS/RRR并联机构简图Fig.6 The sketch of 3-UPS/RRR parallel mechanism
支链坐标系如图7所示,原点在虎克副几何中心点Bi的坐标系Bi-XBiYBiZBi,轴XBi与虎克副的第一根轴线重合,轴YBi与机构处于初始位形时虎克副的第二根轴线重合,轴
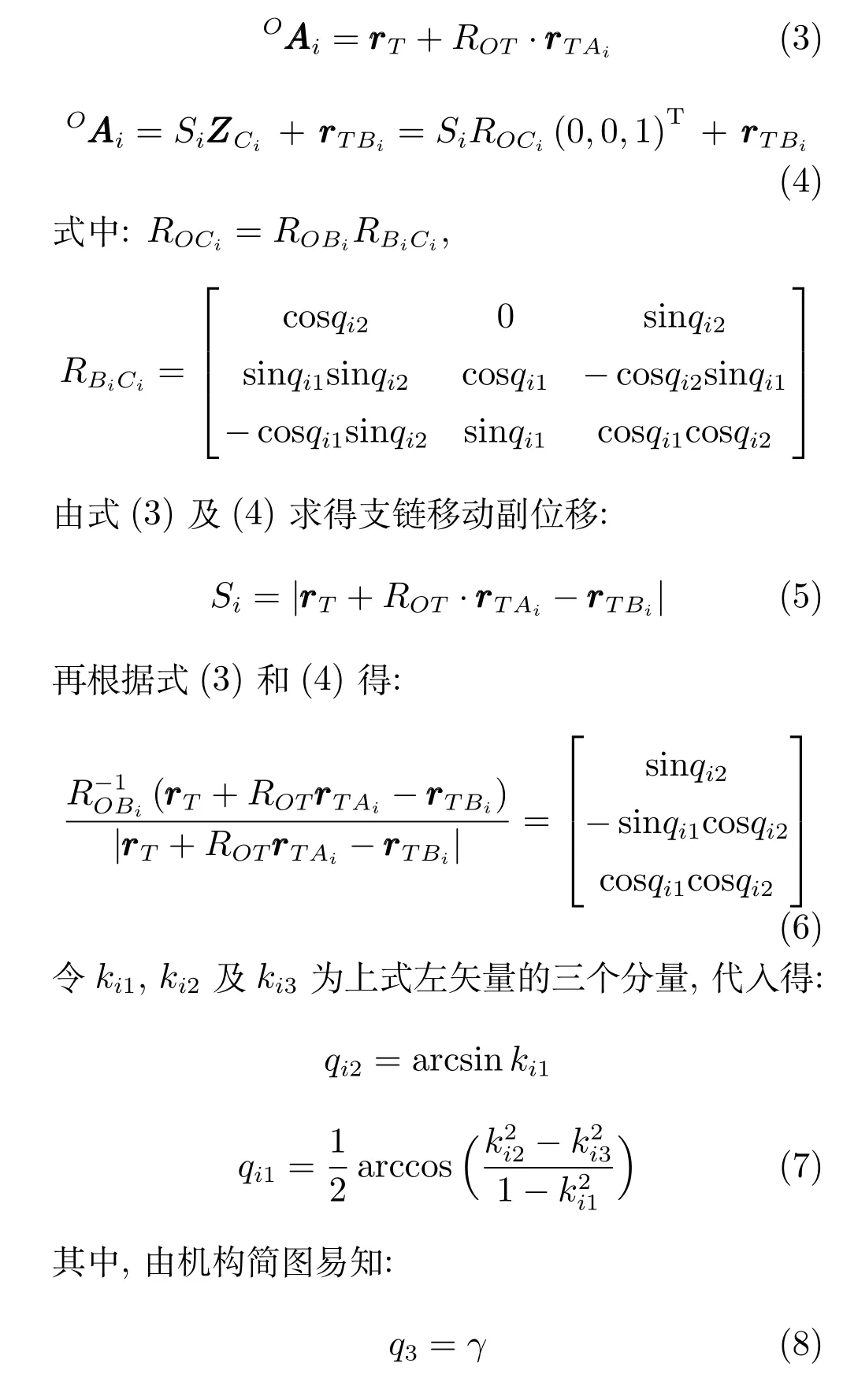
Ci-XCiYCiZCi是建立在杆CiDi上的坐标系,原点为虎克副的几何中心点Ci,轴YCi与虎克副的第二根轴线重合,轴ZCi与杆CiDi重合,轴为原点在球副几何中心点Ai的坐标系,并与Ci-XCiYCiZCi坐标系平行.其中第i支链上绕虎克副第一根轴线的旋转角表示为qi1,绕虎克副第二根轴线的旋转角表示为qi2,绕Z轴旋转的角度表示为q3.
动平台姿态的表达有多种方法,由于此处等效球关节的特征,选用Z-X-Y欧拉角描述.α表示绕X轴的旋转角度(X欧拉角表示背伸/跖屈),β为绕Y轴的旋转角度(Y欧拉角表示内翻/外翻),γ是绕Z轴的旋转角度(Z欧拉角表示内收/外展).一旦角度给定,动平台相对于固定底座的旋转矩阵ROT可以表示如下:
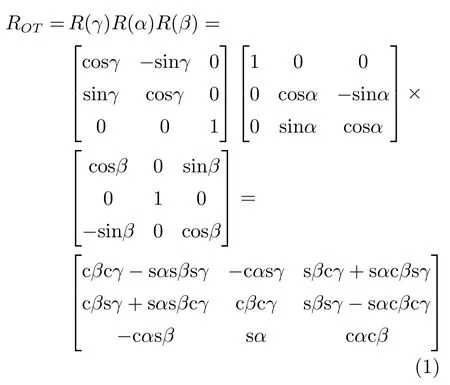
其中,c,s分别为cos、sin的简称.
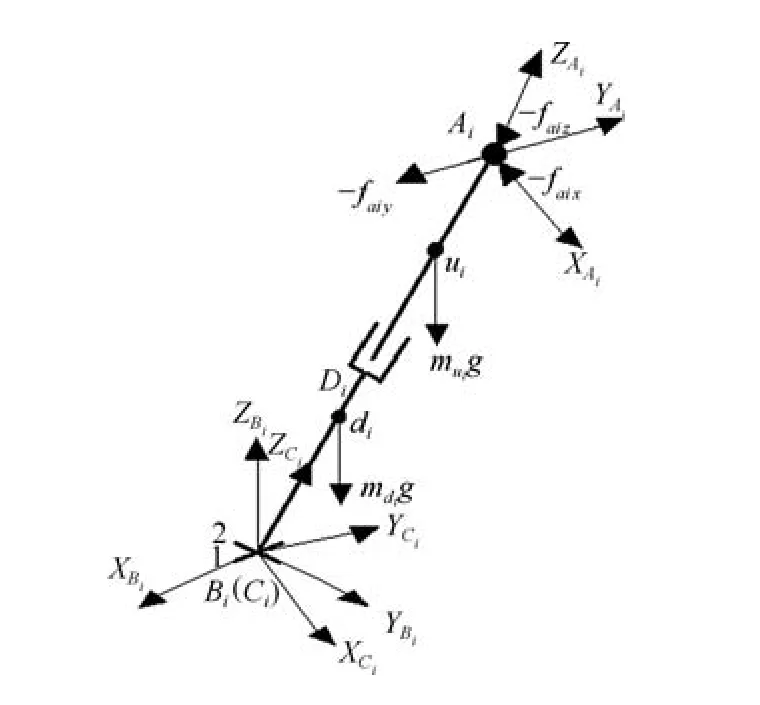
图7 支链坐标简图Fig.7 Diagram of the branched coordinate
2.1 自由度计算
由踝关节康复机构简图(图6)可知,该机构由底座、动平台、主动支链AiBi(i=1,2,3)以及约束支链R1R2R3组成,约束支链R1R2R3可等效为一个球关节,即底座与动平台由三个UPS支链和一个等效球关节连接.根据Kutzbach-Grbler自由度计算公式,机构的自由度可表示为如下形式:
机构由3个UPS支链与1个RRR支链组成,杆件数n=8,铰链数g=10,分别是4个球副、3个虎克副、3个移动副,则机构自由度F可由式(2)计算得到:

3-UPS/RRR机构具有3个自由度,而约束支链只能在三个正交方向转动,故整个机构的运动为绕X、Y和Z轴的转动,能够提供踝关节康复所需运动.
2.2 位置逆解
已知动平台绕固定坐标系的输出转角α、β、γ,求出3个主动支链的驱动器输入位移S1、S2、S3,就是该机构的运动学位置逆解.球铰中心点Ai的位置矢量可分别写为:
2.3 速度与加速度分析
球铰中心点Ai的速度可表示为:

球铰中心点Ai的加速度可表示为:

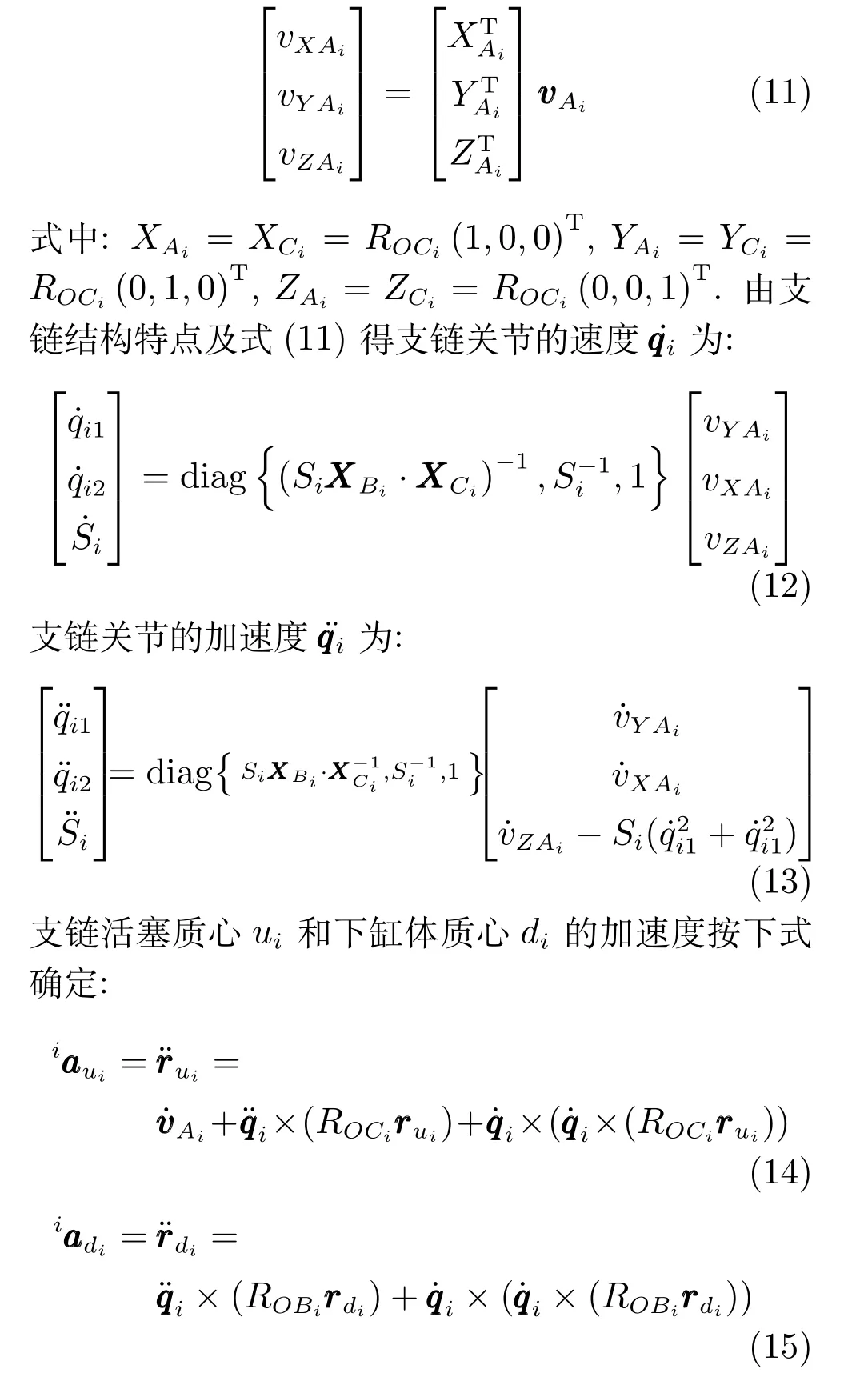
点Ai的速度分别向Ai-XAiYAiZAi坐标系的各坐标轴分解有:
2.4 速度雅可比矩阵
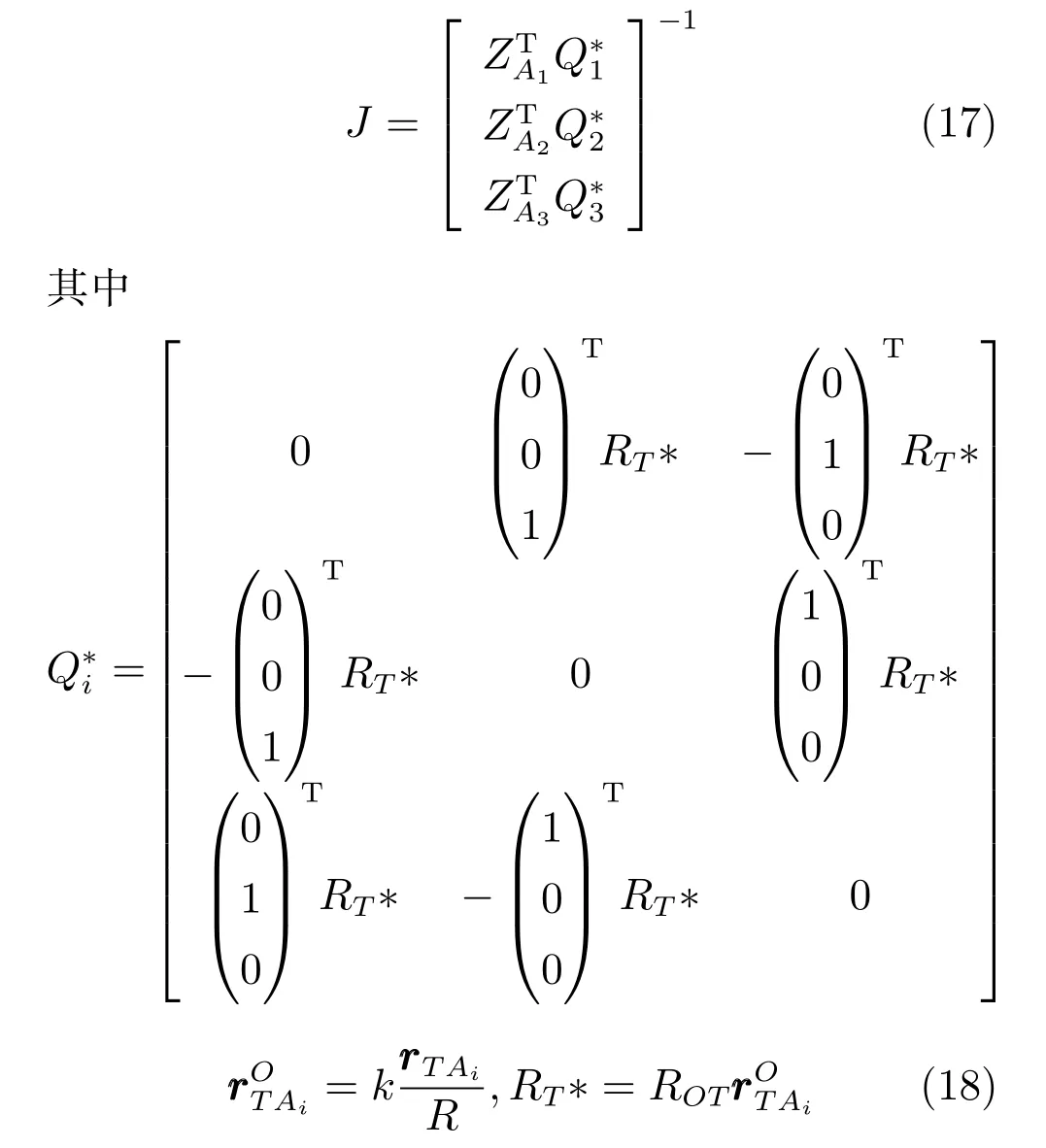
速度雅可比矩阵又称作机构的一阶影响系数,是机构输入输出构件间的速度比例矩阵.对于3-UPS/RRR并联踝关节康复机构,雅可比矩阵是对机构进行运动性能分析和静力学分析的关键.由式(12)可以得到,驱动三个移动副时,机构的雅可比矩阵[17]满足:
3 运动性能分析
3.1 工作空间分析
工作空间是并联机构动平台参考点可达范围的集合,其大小直接影响着并联机构的实际应用价值,而且是衡量机构工作能力的一个重要指标.本文研究的踝关节康复机构的工作空间定义为:满足驱动与结构参数的条件下,动平台所有位姿的集合,机构的结构参数列于表1中.
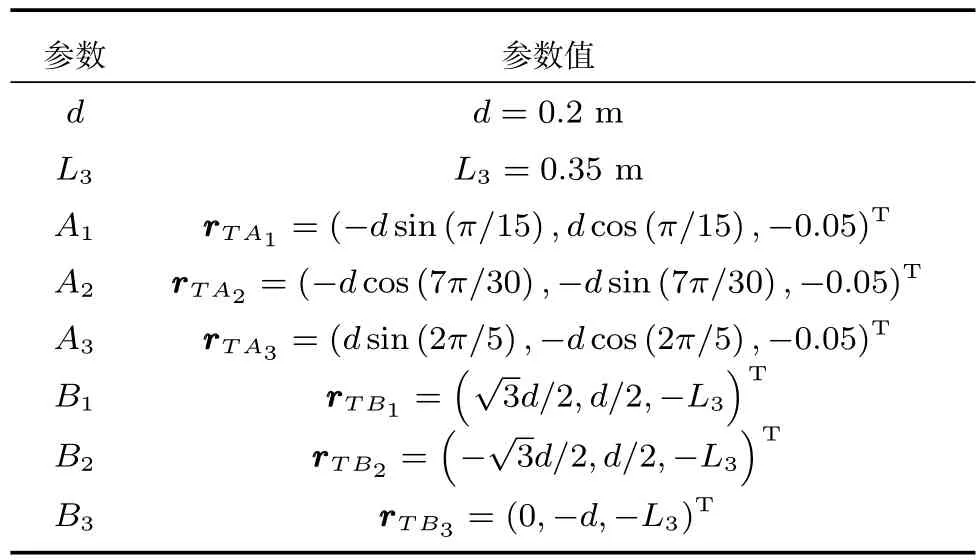
表1 机构的结构参数Table 1 The architectural parameters of the mechanism
在限定移动副的移动距离为±0.55m,虎克副的转动角度为±35°的条件下,借助Matlab软件利用搜索法对机构的工作空间进行仿真分析,结果如图8所示,通过对工作空间图投影可得机构动平台的运动范围如表2所示.将表2中的数据与图1中的统计数据进行比较发现,机构可达的工作空间范围大于踝关节的运动范围,故本文提出的3-UPS/RRR并联机构符合踝关节康复机构设计的基本要求.
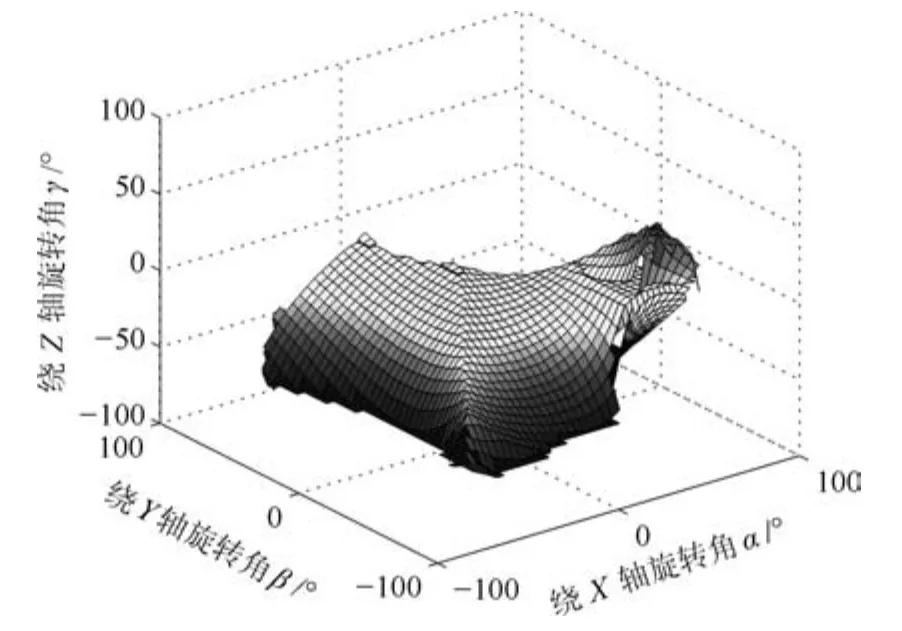
图8 并联机构工作空间Fig.8 The working space of parallel mechanism
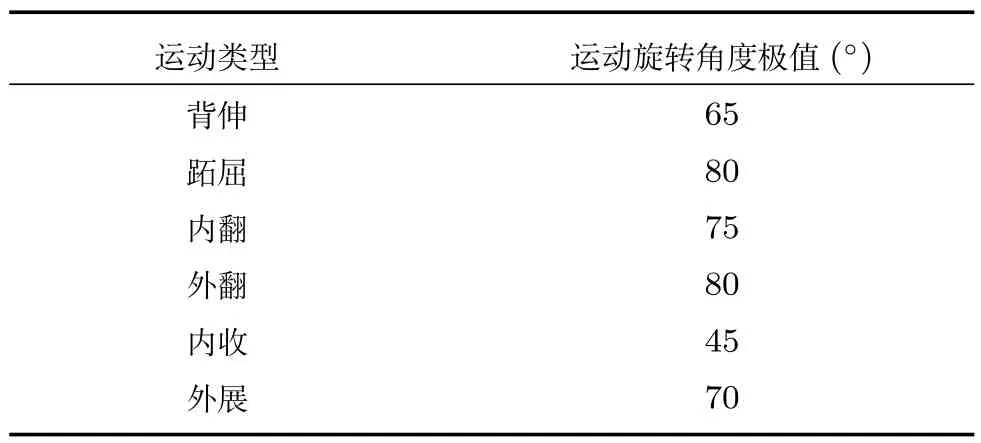
表2 康复机构的运动范围Table 2 The movement range of rehabilitation mechanism
3.2 可操作度分析
可操作度是反映机构动平台在位移和姿态方面可操作能力的一个度量,也是评价机构在某位姿下灵活性的一个指标[20].当机构处于奇异位形时,可操作度w=0,此时机构将失去沿某一方向的活动能力,灵活性也最小,因此,应当尽量避免机构接近奇异位形.当机构处于非奇异位形时,定义雅可比矩阵与其转置矩阵乘积的行列式值的开方为机构的可操作度[21].即:

在规定工作空间内对机构的可操作度进行仿真分析,以α、β为连续变量,γ取不同的角度值,可得到不同姿态下,机构可操作度的分布情况,通过γ取三个不同角度值(一个中间点和两个边界位置点(γ=−20°,0°,20°))时,机构可操作度的变化图像,即可反映机构在整个康复运动范围内可操作度的分布情况,如图9~11所示.
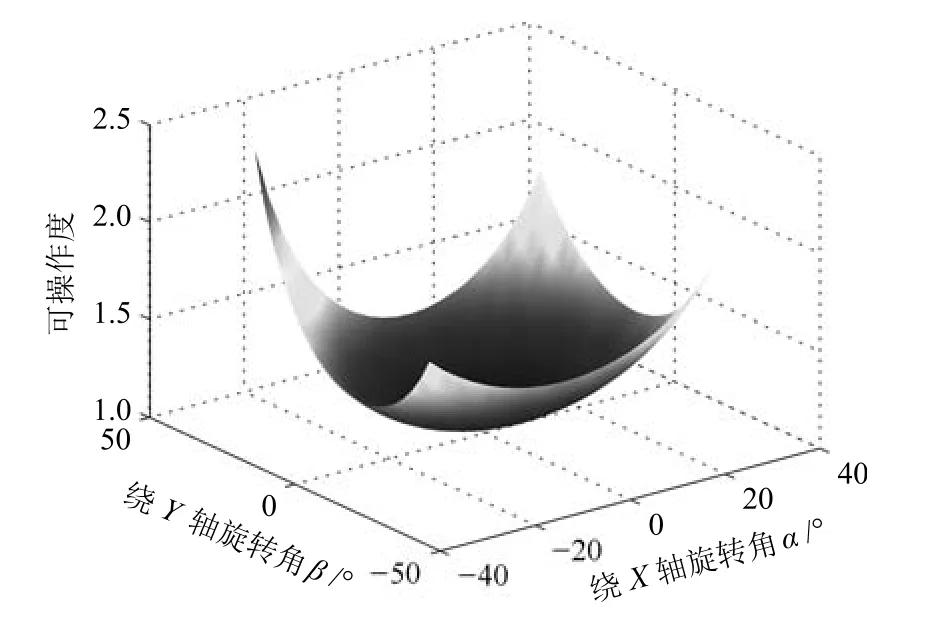
图9 γ=−20°时机构的可操作度Fig.9 The mechanism's operation atγ=−20°
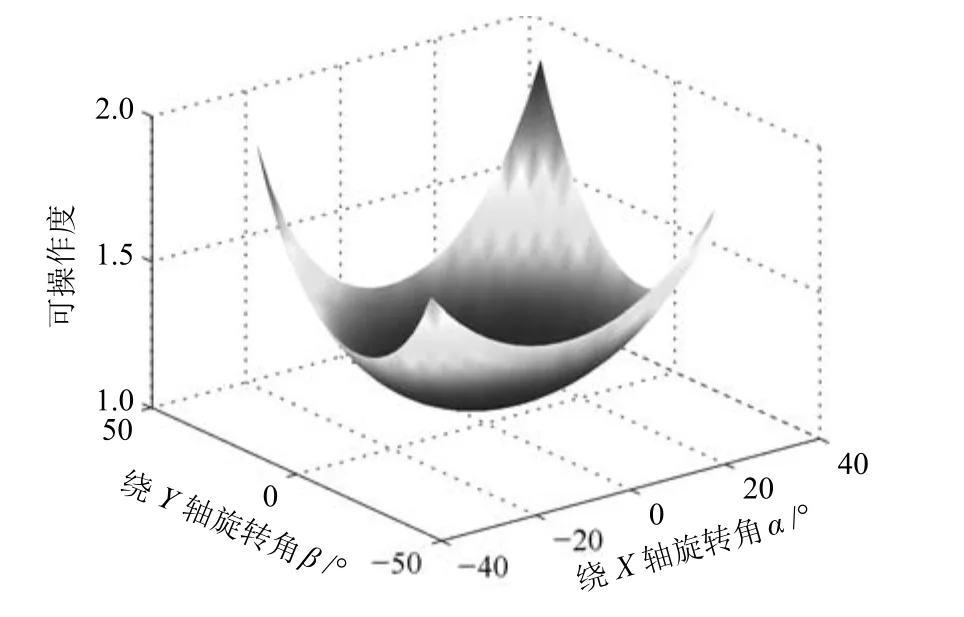
图10 γ=0°时机构的可操作度Fig.10 The mechanism's operation atγ=0°
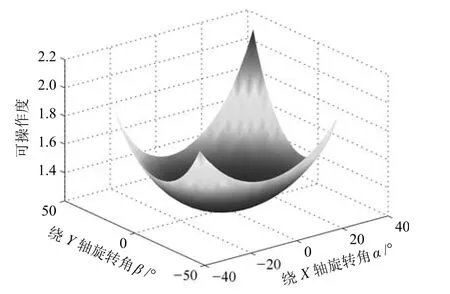
图11 γ=20°时机构的可操作度Fig.11 The mechanism's operation atγ=20°
由仿真图可知,该机构的可操作度值在1到3之间变化,没有零值,且变化连续平稳,说明在该结构参数下,工作空间内机构没有奇异位形,可操作性良好.但在实际应用中,可操作度只能表示机构在某一时刻的操作性能,对于灵巧性的评价也具有局限性,并不能描述当机构存在输入偏差时对输出偏差的影响.因此,还需对3-UPS/RRR并联踝关节康复机构的灵巧性作进一步的分析.
3.3 灵巧性分析
灵巧性分析反映的是机构的综合运动性能,Salisbury等提出采用雅可比矩阵的条件数作为机构的灵巧性指标[22].设机构动平台的输出角速度矢量为ω,输入速度为,则该机构的运动方程为J是机构的无量纲速度雅可比矩阵.当输入速度的偏差为输出角速度偏差为∆ ω时,运动方程可写为:


根据矩阵论的范数理论有:


由式(22)和(23)可得:

令K=‖J‖·‖J−1‖,则K即为雅可比矩阵J的条件数.它是衡量雅可比矩阵的逆矩阵精确度的一个度量,取值范围是:1≤K<∞.若K值较大,则该矩阵的逆矩阵精度较低,此时输入速度较小的偏差将导致操作器较大的偏差.所以在机构设计时,应使雅可比矩阵条件数在其操作范围内尽量为较小的值.当K等于1时,机构处于最佳的传递性能,此时机构处于运动学各向同性[23].从条件数的取值范围可知,其变化范围很大,所以为分析方便起见,定义雅可比矩阵条件数的倒数1/K为灵巧性评价指标.在规定的工作空间内对机构的条件数倒数进行计算分析.同可操作度分析,分别绘制了γ=−20°,0°,20°时机构的条件数倒数分布,如图12~14所示.
观察图12~14可知,机构条件数倒数的最大值为0.71,出现在中间位置,随着机构转动到工作空间的边界位置,条件数倒数逐渐减小至最小值0.25,变化趋势平缓,没有突变.对比文献[13,17]中灵巧性分析结果可知,3-UPS/RRR踝关节康复机构在中间工作空间及整个工作空间内同样具有较好的灵巧性能.
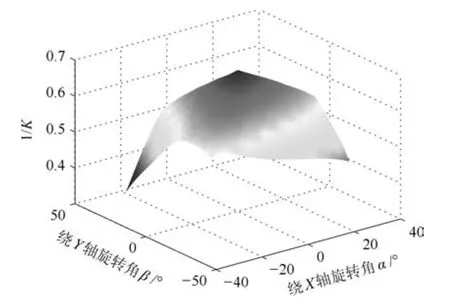
图12 γ=−20°时机构的条件数倒数Fig.12 The mechanism's condition number reciprocal atγ=−20°
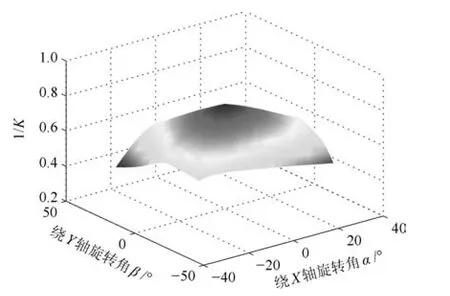
图13 γ=0°时机构的条件数倒数Fig.13 The mechanism's condition number reciprocal atγ=0°
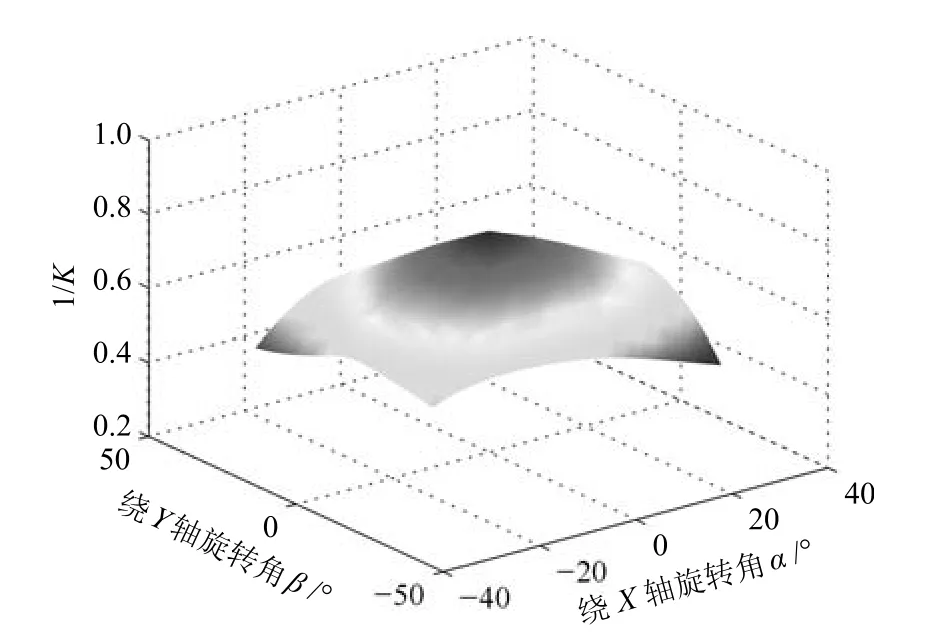
图14 γ=20°时机构的条件数倒数Fig.14 The mechanism's condition number reciprocal atγ=20°
3.4 刚度分析
并联机构刚度是指末端动平台在外力作用下,由于弹性元件的变形引起位移大小的度量,产生变形的有连杆本身、连接铰链及关节驱动装置.对于多数机构而言,在假定连杆和铰链是刚性的前提下,变形的主要来源是传动、减速装置和伺服驱动系统[24].为了简便起见,通常将驱动关节的刚度(包括传动减速装置)用一弹簧常数ki来表示,即:

式中,fi为驱动力,∆qi为fi作用产生的附加变形量.
忽略重力和关节摩擦力的影响,根据雅可比矩阵可得,作用在动平台上的力矢量与驱动力矢量满足:


其中,J为机构速度雅可比矩阵.
机构有三个相同的驱动支链,由结构的对称性,可认为每个驱动支链的刚度相等,则驱动系统刚度为k=diag{k1,k2,k3},其中k1=k2=k3=1[25].将式(25)写成矢量形式:

综合式(26)~(28)可得:
式(30)中,J∗即为机构的刚度雅可比矩阵.现假设作用在动平台的力矢量的模为单位1,即则可求得末端动平台位移量的极值.方法如下:
首先,建立拉格朗日方程:

式中,λG为拉格朗日乘子.
然后,由条件极值求解需满足的条件得:

其中,λG也是(JJT)T(JJT)的特征值.
最后,由特征值求解可得到,末端动平台位移量‖∆θ‖的极大值和极小值:

机构沿位移极大值的方向,其刚度最差,沿极小值的方向,其刚度最好.但在实际应用中很难出现最小位移的情况,因而最小位移量(特征值极小值)并不能代表机构的刚度性能,故取位移极大值来衡量机构的刚度性能[24−25],表达式如下:

‖∆θmax‖表示机构动平台在受到单位力的作用时最大的位移量.因此,机构在任意位形下,‖∆θmax‖越小,机构的刚度性能越好.同可操作度分析,在工作空间内,分别绘制了γ=−20°,0°,20°时机构刚度性能的分布图,如图15~17所示.
由图15~17分析可知,机构在工作空间内,‖∆θmax‖值越接近中间区域越小,也即刚度性能越好,由图1中踝关节运动范围可以发现,踝关节康复运动也主要集中在中间区域,也即刚度性能较好的区域,故机构适合用于踝关节康复训练.
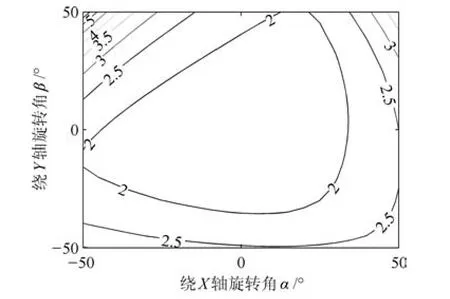
图15 γ=−20°时机构的刚度性能Fig.15 The mechanism's stifness performance atγ=−20°
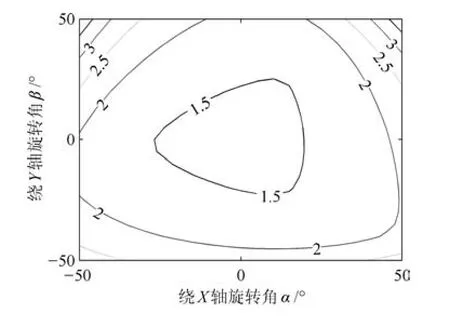
图16 γ=0°时机构的刚度性能Fig.16 The mechanism's stifness performance atγ=0°
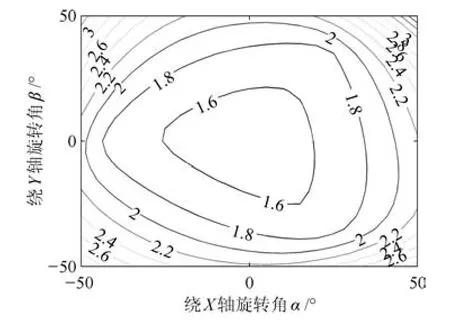
图17 γ=20°时机构的刚度性能Fig.17 The mechanism's stifness performance atγ=20°
4 静力学性能分析
4.1 静力雅可比矩阵
静力雅可比矩阵表征了机构驱动器输入力或力矩与动平台静态操作力或力矩之间的映射关系[24],是对机构进行静力学性能分析的重要依据,可利用速度雅可比矩阵通过虚功原理求得.根据动平台的运动特点,假设动平台在外力矩M的作用下,动平台的虚转角为∆ϕ,相应地输入端驱动关节在驱动力矩τ作用下虚转角为则驱动力矩τ及外力矩M所作虚功为:
由虚功原理知:

代入式(35)及(36)整理得:


代入式(38)得:
所得Jf即为机构静力雅可比矩阵.
4.2 力矩传递性能分析
3-UPS/RRR并联机构只有三个转动方向的自由度,运动过程中主要传递力矩.故对静力雅可比矩阵的关系式(40)取2范数,代入式(41)得:

设输入量为单位力矩矢量,即:

构造如下拉格朗日方程:

式中λi为拉格朗日乘子,则输出力矩取极值的条件为:

其中,λi也为矩阵的特征值,由此得输出力矩M的极值为:

机构在运动过程中只能在一个方向出现最大输出力矩,但在实际应用中很难出现最大输出力矩的情况,因此,最大输出力矩并不能表征机构的力矩传递性能.故将驱动力矩为单位向量时,输出力矩极小值作为评价机构力矩传递性能T(M)的指标[25−26],且极小值越大,机构的力矩传递性能越好,表达式如下:

根据式(47)分别绘制当γ=−20°,0°,20°时机构力矩传递性能指标,如图18~20所示.
由图18~20分析可知,在工作空间内,T(M)值主要集中在0.6到0.8之间,且随着转动角度的增大,力矩传递性能逐渐减小且变化趋势比较平缓均匀.但是不难看出,在中间区域力矩传递性能要优于边缘部分,而踝关节康复运动也主要集中在中间区域,因此满足踝关节康复训练要求.
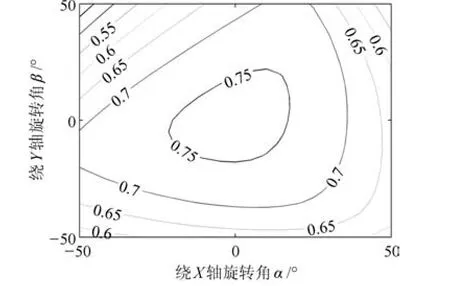
图18 γ=−20°时机构的力矩传递性能Fig.18 The mechanism's torque transmission performance atγ=−20°
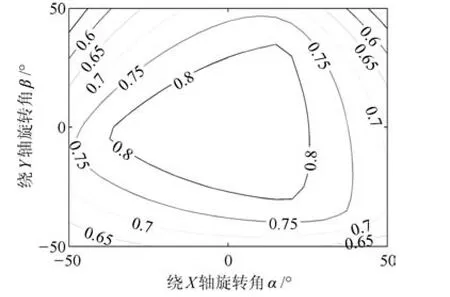
图19 γ=0°时机构的力矩传递性能Fig.19 The mechanism's torque transmission performance atγ=0°
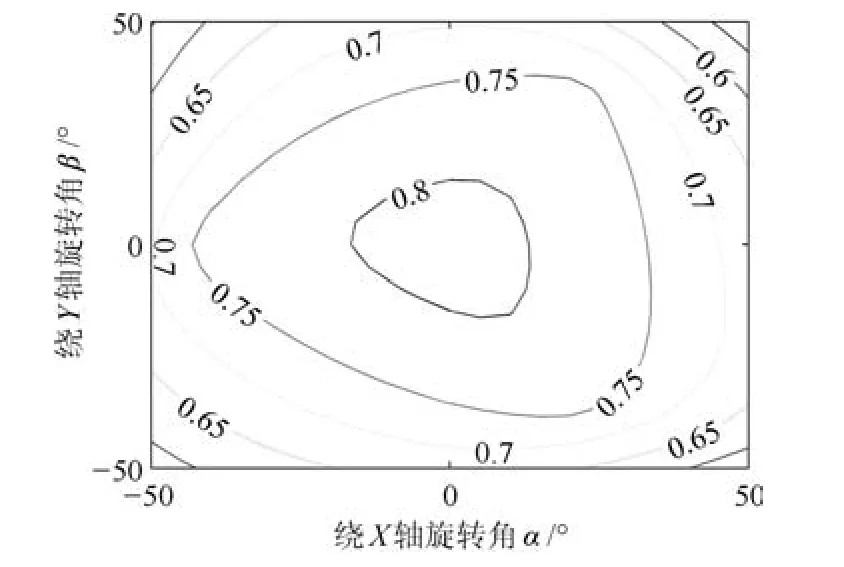
图20 γ=20°时机构的力矩传递性能Fig.20 The mechanism's torque transmission performance atγ=20°
5 动力学分析
机构动力学分析的主要目的是研究机构运动参数与驱动力之间的映射关系,它是机构优化设计、动态性能评价及运动控制的基础.文献[27]运用牛顿-欧拉法建立了Tricept并联机构的逆动力学方程,并对驱动优化问题进行了研究.文献[28]运用牛顿-欧拉法分析2UPS-2RPS机构的逆动力学问题,在给定动平台的运动规律和外力后求解出所需驱动力和约束力矩.基于3-UPS/RRR并联踝关节康复机构,运用牛顿-欧拉法,对机构的逆动力学问题进行分析.
5.1 主动支链动力学
如图7所示,设在支链坐标系下第i支链作用于动平台的三维力向量在定坐标系下重力加速度向量则相对坐标原点Ci,运动支链合外力矩向量可表示为:
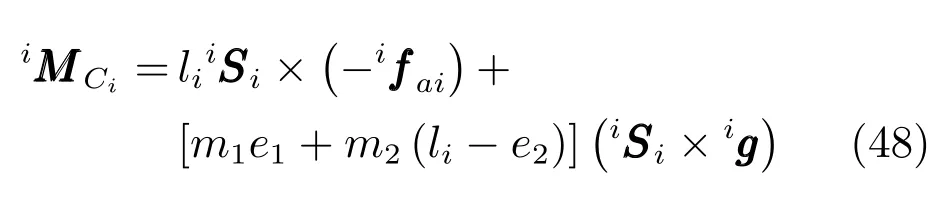
合惯性力矩向量为:
根据欧拉方程,得到力矩平衡方程:

式中,li为支链i的长度,为支链坐标系下轴ZCi所在方向的单位向量;m1、m2分别为下缸体和活塞的质量;e1、e2分别为下缸体质心di到Bi的距离和活塞的质心ui到Ai的距离;iId、iIu分别为下缸体和活塞在第i支链坐标系下关于质心的惯性矩阵;iωi、iεi分别为支链坐标系下i支链的角速度和角加速度,且
5.2 动平台动力学
对动平台进行分析,由牛顿定理得:

式中,Q为动平台的质心;m为动平台的质量;为定坐标系下支链i作用于动平台的力;为作用于动平台的外力,为约束支链对动平台的约束力,由动平台只有转动自由度知
由欧拉方程得到,动平台在动坐标系下关于质心的力矩平衡方程为:


式中,θi为支链i与定平台的夹角.
5.3 算例仿真给定3-UPS/RRR并联机构的几何和物理参数如下:机构所受外载荷动坐标系下动平台所受载荷力矩矢量N·m,重力加速度cosθi=0.589.

考虑踝关节康复运动需要且不失一般性,设动平台初始姿态:(α0β0γ0)=(0−π/9−π/18);初始角速度:Tω0=(0.1 0.1 0.1)Trad/s;角加速度:Tε=(0.02 0.02 0.02)Trad/s2.
令时间t=5s,经Matlab编程计算,可得三个UPS支链驱动力和约束支链的约束力,分别如图21和图22所示.
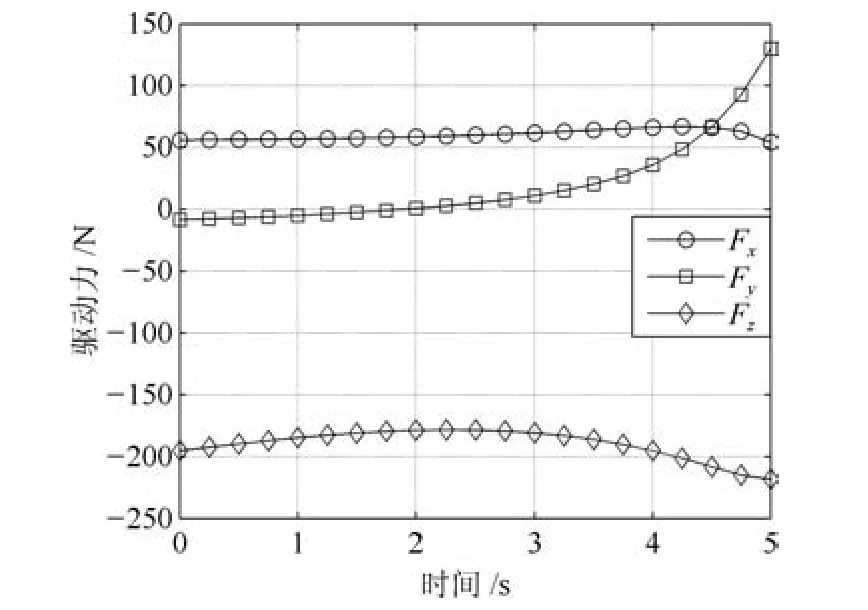
图22 约束支链的约束力Fig.22 The constraint force of constraint branches
由图21可知,驱动力在-100~100N之间,主要用于实现动平台三个方向的转动,由于给出的运动轨迹是一条不规则的曲线,三个驱动力的变化没有规律性,更具有一般性.图22中,约束力Fx与Fy在0~200N之间,主要用来平衡支链驱动力在x、y方向的分量和动平台的惯性力,Fz比Fx和Fy大,是因为Fz需要平衡动平台的重力、施加的外力、驱动力在z方向的分量和动平台的惯性力.
6 结论
本文结合踝关节的解剖结构及其运动特性,在分析现有踝关节康复机构的基础上,提出一种3-UPS/RRR并联踝关节康复机构.该机构不仅能满足踝关节康复所需的背伸/跖屈、内翻/外翻、内收/外展三个方向的运动,还能保证机构的转动中心与踝关节的运动中心重合.机构采用三个伸缩支链驱动,结构简单,没有冗余支链,且采用主动支链倾斜布置避开机构的奇异位形,通过搜索算法找到了合适的倾斜角以满足踝关节康复运动需要.机构位置反解及工作空间的求解分析表明机构能很好地完成踝关节康复训练.基于速度雅可比矩阵的仿真分析结果表明,机构具有良好的运动学性能与静力学性能,适合用于踝关节康复训练.利用牛顿-欧拉法建立机构的逆动力学方程,求解出支链驱动力、约束支链约束力与运动参数间的映射关系,并通过实例仿真为3-UPS/RRR机构的康复运动控制和驱动系统的选取提供参考.
1 Yao Tai-Shun,Meng Xian-Jie.Ankle Surgery.Beijing:Traditional Chinese Medicine Press,1998.21−36 (姚太顺,孟宪杰.踝关节外科.北京:中国中医药出版社,1998. 21−36)
2 Li D,Zhao T S,Bian H.Bio-syncretic mechanism system and its application in the rehabilitation engineering.In:Proceedings of the 2008 International Mechanisms and Machine Science Conference.Dalian,China,2008.28−31
3 Jiao Shuang,Yan Ru-Yun.The research progress on prevention sports injury of ankle proprioception training.Chinese Journal of Sports Medicine,2009,28(6):713−716 (焦爽,闫汝蕴.本体感觉训练预防踝关节运动损伤研究进展.中国运动医学杂志,2009,28(6):713−716)
4 Girone M J,Burdea G C,Bouzit M.The“Rutgers Ankle”orthopedic rehabilitation interface.Proceedings of the ASME Haptics Symposium,1999,67:305−312
5 Girone M,Burdea G,Bouzit M,Popescu V,Deutsch J E.A Stewart platform-based system for ankle telerehabilitation.Autonomous Robots,2001,10(2):203−212
6 Saglia J A,Tsagarakis N G,Dai J S,Caldwell D G.A high performance 2-Dof over-actuated parallel mechanismfor ankle rehabilitation.In:Proceedings of the 2009 International Conference on Robotics and Automation.Kobe, Japan:IEEE,2009.2180−2186
7 Yu Hai-Bo.Design of System of Parallel Ankle Rehabilitation Device[Master dissertation],Yanshan University, China,2006. (于海波.并联式踝关节康复机器人系统设计[硕士学位论文],燕山大学,中国,2006.)
8 Liu G Q,Gao J L,Yue H,Zhang X J,Lu G D.Design and kinematics analysis of parallel robots for ankle rehabilitation.In:Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems.Beijing,China:IEEE,2006.253−258
9 Wang C Z,Fang Y F,Guo S,Chen Y Q.Design and kinematical performance analysis of a 3-RUS/RRR redundantly actuated parallel mechanism for ankle rehabilitation.Journal of Mechanisms and Robotics,2013,5(3):041003-1−041003-11
10 Bian Hui,Zhao Tie-Shi,Tian Xing-Bin,Li Dan,Pan Wang. Bio-syncretic rehabilitation mechanism and its application.Robot,2010.32(4):470−477 (边辉,赵铁石,田行斌,李丹,潘旺.生物融合式康复机构及其应用.机器人,2010,32(4):470−477)
11 Leardini A,O'Connor J J,Catani F,Giannini S.Kinematics of the human ankle complex in passive fexion;a single degree of freedom system.Journal of Biomechanics,1999,32(2):111−118
12 Tsoi Y H,Xie S Q.Design and control of a parallel robot for ankle rehabilitation.International Journal of Intelligent Systems Technologies and Applications,2010,8(1−4): 100−113
13 Yu Run-Tian,Fang Yue-Fa,Guo Sheng.Design and kinematic performance analysis of a cable-driven parallel mechanism for ankle rehabilitation.Robot,2015,37(1):53−62, 73 (禹润田,方跃法,郭盛.绳驱动并联踝关节康复机构设计及运动性能分析.机器人,2015,37(1):53−62,73)
14 Yiu Y K,Cheng H,Xiong Z H,Liu G F,Li Z X.On the dynamics of parallel manipulators.In:Proceedings of the 2001 IEEE International Conference on Robotics and Automation.Seoul,South Korea:IEEE,2001.146−154
15 Sen S,Dasgupta B,Mallik A K.Variational approach for singularity-free path-planning of parallel manipulators.Mechanism and Machine Theory,2003,38(11):1165−1183
16 Bandyopadhyay S,Ghosal A.Analysis of confguration space singularities of closed-loop mechanisms and parallel manipulators.Mechanism and Machine Theory,2004,39(5):519−544
17 Li Jian-Feng,Li Shi-Cai,Tao Chun-Jing,Ji Run,Xu Cheng-Hui,Zhang Zhao-Jing.Parallel 2-UP¯S/R¯RR ankle rehabilitation mechanism and kinematic performance analysis.Robot,2016,38(2):144−153 (李剑锋,李世才,陶春静,季润,徐成辉,张兆晶.并联 2-UP¯S/R¯RR 踝关节康复机构及运动性能分析.机器人,2016,38(2):144−153)
18 Wang Man-Xin,Huang Tian.Kinematics analysis and dimensional synthesis of a plane symmetric 3-SP¯R parallel manipulator.Journal of Mechanical Engineering,2013,49(15): 22−27 (汪满新,黄田.面对称3-SP¯R并联机构的运动学分析与尺度综合.机械工程学报,2013,49(15):22−27)
19 Chen Xiu-Long,Gao Qing,Zhao Yong-Sheng.Dexterity measures of 4-UPS-UPU parallel coordinate measuring machine.Computer Integrated Manufacturing Systems,2012,18(6):1200−1208 (陈修龙,高庆,赵永生.4-UPS-UPU并联坐标测量机的灵巧度研究.计算机集成制造系统,2012,18(6):1200−1208)
20 Rao Qing,Bai Shi-Xian.Manipulability analysis and deeinition of 6-SPS stewart robot.Robot,1994,16(6):345−349 (饶青,白师贤.6-6型Stewart机器人的可操作性分析及其定义.机器人,1994,16(6):345−349)
21 Yoshikawa T.Manipulability of robotic mechanisms.The International Journal of Robotics Research,1985,4(2):3−9
22 Salisbury J K,Craig J J.Articulated hands:force control and kinematic issues.The International Journal of Robotics Research,1982,1(1):4−17
23 Huang Zhen,Kong Ling-Fu,Fang Yue-Fa.Parallel Robot Mechanism and Control Theories.Beijing:Machinery Industry Press,1997.183−186 (黄真,孔令富,方跃法.并联机器人机构学理论及控制.北京:机械工业出版社,1997.183−186)
24 Xiong You-Lun,Ding Han,Liu En-Cang.Robotics.Beijing: Machinery Industry Press,1993.118−128 (熊有伦,丁汉,刘恩沧.机器人学.北京:机械工业出版社,1993. 118−128)
25 Zhang Xin.Optimization of Motion Parameters of a 3-UPS/S Spherical Parallel Mechanism[Master dissertation], Yanshan University,China,2013 (张新.一种3-UPS/S球面并联机构的运动参数优化研究[硕士学位论文],燕山大学,中国,2013)
26 Cui Bing-Yan,Jin Zhen-Lin.Analysis of statics performance for a novel elbow joint of agricultural robot.Transactions of the CSAE,2011,27(3):122−125 (崔冰艳,金振林.农业机器人新型肘关节的静力学性能分析.农业工程学报,2011,27(3):122−125)
27 Qing Jian-Xi,Li Jian-Feng,Fang Bin.Drive optimization of Tricept parallel mechanism with redundant actuation.Chinese Journal of Mechanical Engineering,2010,46(5): 8−14 (卿建喜,李剑锋,方斌.冗余驱动Tricept并联机构的驱动优化.机械工程学报,2010,46(5):8−14)
28 Feng Zhi-You,Zhang Yan,Yang Ting-Li,Zhang Ce.Inverse dynamics of a 2UPS-2RPS parallel mechanism by Newton-Euler formulation.Transactions of the Chinese Society for Agricultural Machinery,2009,40(4):193−197 (冯志友,张燕,杨廷力,张策.基于牛顿欧拉法的2UPS-2RPS并联机构逆动力学分析.农业机械学报,2009,40(4):193−197)
李剑锋北京工业大学机械工程与应用电子技术学院教授.1999年获北京航空航天大学机器人所博士学位.主要研究方向为机器人,并联机构与穿戴外骨骼技术.本文通信作者.
E-mail:lijianfeng@bjut.edu.cn
(LI Jian-FengProfessor at the College of Mechanical Engineering and Applied Electronics Technology,Beijing University of Technology.He received his Ph.D.degree from Robotics Institute,Beihang University in 1999.His research interest covers robot,parallel mechanism and wearable exoskeleton technology.Corresponding author of this paper.)
徐成辉北京工业大学机械工程与应用电子技术学院硕士研究生.2013年获得武汉纺织大学机械工程与自动化学院学士学位.主要研究方向为穿戴外骨骼技术.E-mail:xchde628@163.com
(XU Cheng-HuiMaster student at the College of Mechanical Engineering and Applied Electronics Technology,Beijing University of Technology.He received his bachelor degree from Mechanical Engineering and Automation,Wuhan Textile University in 2013.His main research interest is wearable exoskeleton technology.)
陶春静国家康复辅具研究中心副教授. 2007年获中国科学院电气工程研究所博士学位.主要研究方向为康复设备设计与穿戴外骨骼技术.
E-mail:taochj@gmail.com
(TAO Chun-JingAssociate professor at the National Research Center for Rehabilitation Technical Aids.She received her Ph.D. degree from Institute of Electrical Engineering,Chinese Academy of Sciences in 2007.Her research interest covers rehabilitation equipment design and wearable exoskeleton technology.)

季 润国家康复辅具研究中心工程师. 2008年获首都医科大学学士学位.主要研究方向为康复设备设计与穿戴外骨骼技术.E-mail:jirun@gmail.com
(JI RunEngineer at the National Research Center for Rehabilitation Technical Aids.He received his bachelor degree from Capital Medical University in 2008.His research interest covers rehabilitation equipment design and wearable exoskeleton technology.)

李世才北京工业大学机械工程与应用电子技术学院硕士研究生.2014年获得哈尔滨理工大学机电学院学士学位.主要研究方向为穿戴外骨骼技术.
E-mail:lishicaijiayou@163.com
(LI Shi-CaiMaster student at the College of Mechanical Engineering and Applied Electronics Technology,Beijing University of Technology.He received his bachelor degree from Mechanical and Electrical Engineering,Harbin University of Science and Technology in 2014.His main research interest is wearable exoskeleton technology.)

张兆晶北京工业大学机械工程与应用电子技术学院硕士.2014年获北京工业大学大学机械工程与应用电子技术学院学士学位.主要研究方向为穿戴外骨骼技术.E-mail:jmzzj050@sina.com
(ZHANG Zhao-JingMasterstudent at the College of Mechanical Engineering and Applied Electronics Technology,Beijing University of Technology.He received his bachelor degree from College of Mechanical Engineering and Applied Electronics Technology,Beijing University of Technology in 2014.His main research interest is wearable exoskeleton technology.)
A Parallel Ankle Rehabilitation Mechanism and Its Performance Analysis Based on 3-UPS/RRR
LI Jian-Feng1,2XU Cheng-Hui1,2TAO Chun-Jing3JI Run3LI Shi-Cai1,2ZHANG Zhao-Jing1,2
Based on the physiological anatomical structure and movement characteristics analysis of human ankle joint, a 3 degree of freedom(DoF)3-UPS/RRR ankle rehabilitation parallel mechanism is presented.Its three active branched chain inclination arrangement avoids the singular confguration of the mechanism and meets the required ankle rehabilitation workspaces.By means of constraint branches and the moving platform,the mechanism center of rotations matches the patient's ankle center of rotations.Inverse kinematics is solved analytically velocity Jacobian matrix and statics Jacobian matrix are established,and mechanism workspace is coped with.Moreover,in view of Jacobian matrix, kinematics performance and statics performance of the mechanism are analyzed and simulated.The result shows that the mechanism is of favorable operability,fexibility,and stifness characteristics,and its torque transmission is within the specifed workspace.Lastly,inverse dynamics equations of the mechanism are modeled by Newton-Euler formulation; the relationship among driving forces,constraint forces and motion parameters are obtained.A computational example is provided.
Ankle rehabilitation,parallel mechanism,constrained branched chain,torque transmission performance, Newton-Euler
李剑锋,徐成辉,陶春静,季润,李世才,张兆晶.基于3-UPS/RRR的并联踝关节康复机构及其性能分析.自动化学报,2016,42(12):1794−1807
Li Jian-Feng,Xu Cheng-Hui,Tao Chun-Jing,Ji Run,Li Shi-Cai,Zhang Zhao-Jing.A parallel ankle rehabilitation mechanism and its performance analysis based on 3-UPS/RRR.Acta Automatica Sinica,2016,42(12):1794−1807
2016-02-04 录用日期2016-09-30
Manuscript received February 4,2016;accepted September 30, 2016
国家自然科学基金(61273342),北京市自然科学基金 (3132005, 3113026)资助
Supported by National Natural Science Foundation of China (61273342),Natural Science Foundation of Beijing(3132005, 3113026)
本文责任编委王卫群
Recommended by Associate Editor WANG Wei-Qun
1.北京工业大学机械工程与应用电子技术学院北京100124 2.北京工业大学北京市先进制造技术重点实验室北京100124 3.国家康复辅具研究中心北京100176
1.The College of Mechanical Engineering and Applied Electronics Technology,Beijing University of Technology,Beijing 100124 2.Advanced Manufacturing Technology of the Key Laboratory of Beijing Municipality,Beijing University of Technology,Beijing 100124 3.National Research Center for Rehabilitation Technical Aids,Beijing 100176
