装载机动臂矫正液压系统的设计
2017-01-09梁春芝王俊梁李慧琼
梁春芝,王俊梁,李慧琼
(1.广西柳工机械股份有限公司,广西柳州545000;2.广西科技大学机械工程学院,广西柳州545000)
装备应用技术
装载机动臂矫正液压系统的设计
梁春芝1,王俊梁2,李慧琼1
(1.广西柳工机械股份有限公司,广西柳州545000;2.广西科技大学机械工程学院,广西柳州545000)
针对现有的装载机动臂手动矫正装置液压系统存在操作繁琐、只能手动及控制精度低等问题,在分析现有装载机动臂矫正装置工作原理的基础上,提出了采用双向电磁组合阀、保压阀、压力传感器、IO卡控制油缸开关等技术的新型动臂智能矫正液压系统方案。介绍了该系统的智能工作原理及特点、主要液压元件的选型,分析了系统运行过程。该系统用于装载机动臂焊后变形的矫正,具有智能操作、保压、系统结构简单、维护方便、控制能力强及精度高等特点。
动臂;液压系统;自动操作;保压
轮式装载机是当今工程建设中应用最为广泛的一种工程机械,而动臂是装载机工作装置的主要承力构件,其质量状况对工作装置的性能和寿命有直接的影响[1]。在目前无法消除焊接变形的技术条件下,动臂矫正成了装载机动臂质量保证的重要工序。
动臂焊后会引起动臂板变形,导致铲斗孔与车架孔两侧的内外开档尺寸有所偏差,目前通用的矫正方法有:火焰矫正法、机械矫正法和混合矫正法[2]。其中手动机械矫正辅助以火焰矫正方法为最传统的矫正方式。传统的矫正方式对矫正人员的经验要求比较高,且存在劳动强度大、矫正精度低、不能保证对称度及提高生产效率等问题[3]。
动臂矫正液压系统在原矫正装置的基础上添加压紧油缸、电磁换向阀、减压阀、保压阀、组合阀块等元件,意图将手动矫正系统改造成为自动液压矫正系统,形成一套高效节能、操作简单、精度高的矫正系统。
1 动臂矫正装置的结构与原理
1.1 结构组成
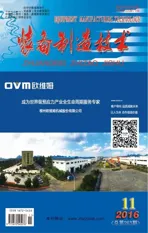
装载机动臂矫正平台结构如图1所示,主要由油缸、双向电磁组合阀、保压阀、激光传感器、压力传感器、液压泵、电控柜、油路管道等组成。
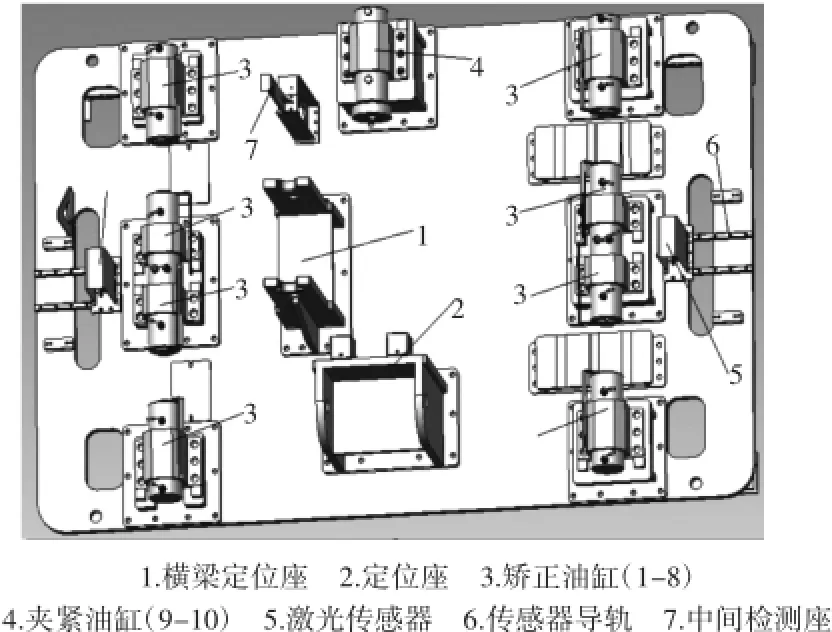
图1 动臂矫正装置
装载机动臂结构如图2所示,主要由2件动臂板和1件横梁焊接组成。
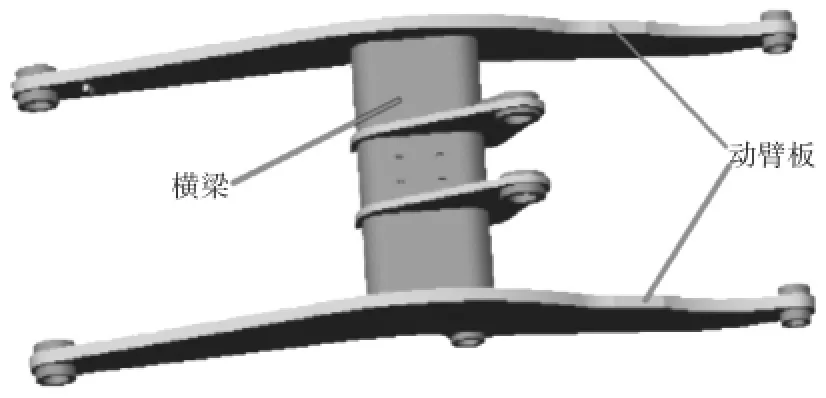
图2 动臂
1.2 工作原理
动臂矫正装置由液压泵提供动力,首先,将动臂吊到矫正装置中,检测变形数据,再由电磁阀控制油缸9、10夹紧动臂;然后根据需要通过电磁阀控制油缸1-8的伸缩,对动臂进行合理的推出反变形,将其矫正到误差范围内(为防止矫正过程中,动臂摆动过大,采取夹紧一边矫正另一边的方式),如动臂铲斗孔一侧向左偏3 mm,则夹紧其他不矫正的三边,油缸将其向右推出一段距离后缩回,至于推出多少会根据动臂型号与偏差距离决定,有时需进行多次矫正才可达到要求;最后松开所有油缸,将矫正完成的动臂吊出装置。
2 动臂矫正平台液压系统设计
2.1 液压系统设计要求
动臂矫正装置的工作环境比较恶劣,具有元件安装空间有限、噪声及灰尘较多等问题。目前,现有的矫正装置液压系统存在结构复杂、操作繁琐、只能手动操作及控制精度低等问题。因此,新设计的液压系统除满足基本要求外,还需尽量解决上述问题,最终系统的完成需达到以下几点要求:
(1)该系统属于智能控制系统,程序的出错或其他等原因可能会出现油缸一直推出的情况,称之为推死,为防止这一问题出现在液压管路中添加油压监控设备;
(2)为保证液压泵提供的油压在合适的范围之内,在管路安装压力传感器;
(3)油缸9、10是压紧油缸,工作时需持续保持压力,在此两路管路中需安装保压阀;
(4)压紧油缸9、10的保压阀的保压压力也需设置在合适范围内,防止保压压力过大,引起整个装置的变形,不利于对动臂准确位置的确定,因此在管路中增加了减压阀;
(5)安装整个系统的开关运行控制,当工装停止运行时,需及时将液压系统暂停或关闭,减少能耗;
(6)优化液压管路设计,该装置还有电气系统,为防止管路及电线交叉影响,需尽量简化液压系统;
(7)采用双向电磁组合阀和IO卡控制电磁开关等技术,可尽量将管路连接数简化,降低发生漏油等故障频率。
2.2 液压系统基本回路
动臂矫正液压系统主要由液压站、油缸、双向电磁组合阀、保压阀、溢流阀、减压阀、压力传感器等液压元件组成。液压系统原理如图3所示。
图3 液压系统原理图
为达到动臂矫正过程的自动化,需要对矫正过程中液压系统的压力大小和动臂的位置进行监控;同时采用的双向电磁组合阀可简化油路,让系统的检验与维修,如图4所示,将4个双向电磁阀、减压阀和保压阀装配在一个油路块上,不仅减少了管路的连接、简化了系统,而且使系统更加稳固[4]。
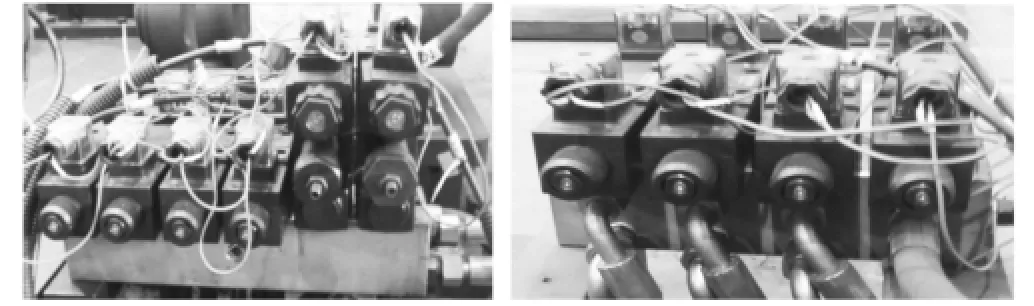
图4 集成阀组
2.3 主要参数和液压元件的选型设计
(1)主要参数
动臂校正原理主要是通过外界力作用在动臂板上,使其产生反变形,达到标准位置。作用力需要一个合理的值,所以必须对动臂板进行受力分析,如图5所示。
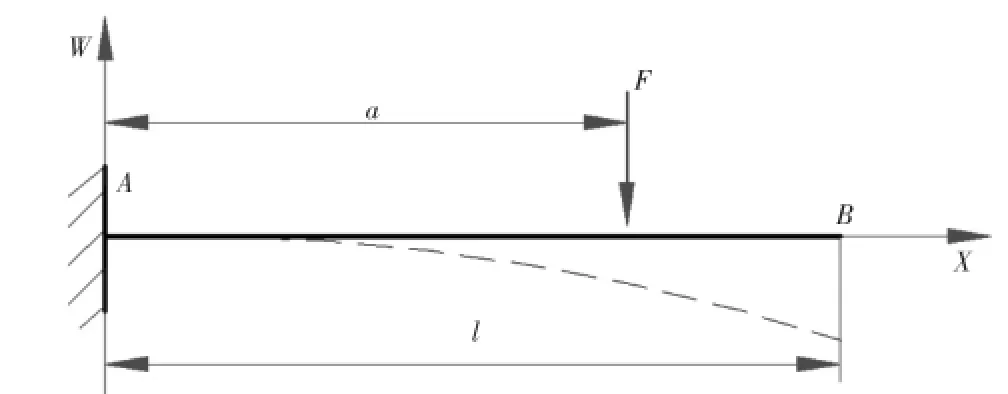
图5 动臂板进行受力分析
扰度:WB=-Fa2(3l-a)/6EI
惯性矩:I=bh3/12
公式转换:F=-WB6Ebh3/12a2(3l-a)
根据经验数据可得,校正变形≤150 mm即能满足产品校正要求,即WB=-150 mm:弹性模量:E=200 GPa;b为截面宽度,b=60 mm;h为截面高度,h=352 mm;a、l如图5,分别为受力点和变形点位置尺寸距离,a=885 mm,b=119 mm,代入公式,得出:F=115.8×106N.
(2)油缸
根据上述公式得出油缸输出推力F不小于115.8×106N才能完成矫正工作,油缸杆径可选,初选杆径90 mm,输出压强P=F/S=F/πr2=18.2 MPa.为了以后产品更新换代后,工装可以改进继续使用,因此预留了1.5倍压强,所以油缸选择可承受压强30 MPa,油缸选型参数如表1所列。
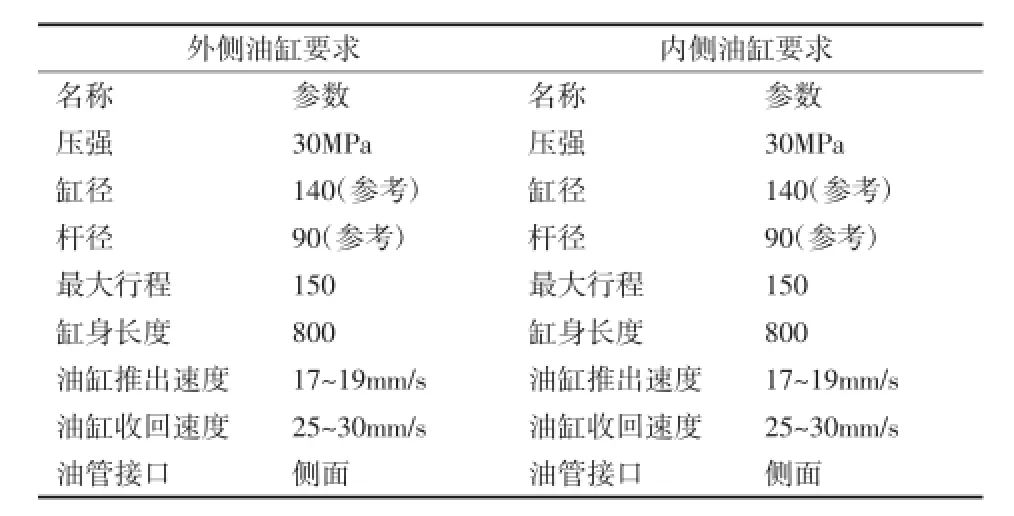
表1 油缸选型参数表
(3)液压站设计
液压站增加风冷装置,保证使用频率30台/班,每台操作时间10 min左右,风冷可满足冷却要求,预留水冷接口,预防产量增加可水冷。液压站采用柱塞变量泵,噪音不大于75 dB,压力可调,保证输出压强可调范围至少满足0~30 MPa,预留安全系列,各部件承受压力不低于35 MPa.
(4)电磁阀选型
首先根据装载机动臂矫正过程控制油缸的组合阀块,为减少阀块的复杂程度,避免孔道过长、过多而不便于加工,在一块油路板上安装元件的数量一般不超过10~12个,选择双向电磁阀。最终选择了帕克电磁阀,型号:D1VW001CNTW、最大工作压力:35 MPa、最大流量:80 L/min、工作循环/切换时间:32 ms(直流)/13 ms(交流)、切换频率:15 000次/h.
(5)压力传感器选型
压力传感器选型液压泵的工作压力为0~30 MPa,根据性价比选择为三友HSTL-902数显型(4~20 mA).
(6)保压阀选型
液压泵的工作压力为0~30 MPa,保压阀的作用主要用于动臂的夹紧工序,而压力过大会引起整个装置的变形,综合考虑后选择油研叠加式液控单向阀MP-01-40、叠加阀减压阀MR-01-30最高工作压力:31.5 MPa、最大流量:35 L/min.安装时将其与双向电磁阀组合起来控制一个油缸,从而达到保压的作用。
3 结束语
新液压系统设计后具有如下优点:一,相对于同类产品系统具有易操作、结构简单、便于检查与维修的优点;二,该系统采用双向电磁组合阀块、IO卡控制油缸伸缩、传感器实时监控系统压力等技术,提高了动臂矫正精度、效率;三,保证了动臂矫后对称度并减少了矫正后的返修率。
经测试,装载机动臂矫正平台液压系统的各项技术指标均达到设计的要求。该系统的成功设计与应用为装载机生产线的自动化提供了有力的改造依据。
[1]余成波,冯丽辉,潘盛辉.虚拟仪器技术与设计[M].重庆:重庆大学出版社,2006.
[2]陈东升.挖掘机结构件焊接工艺及变形研究[D].长春:吉林大学,2009.
[3]孙云飞,徐武彬,花庆宝,等.装载机动臂焊后变形矫正影响因素研究[J].机械研究与应用,2016(01):63-65.
[4]付宁,雷坚.地下凿岩台车钻孔液压系统设计[J].矿山机械,2016,44(8):136-138.
The Design of the Hydraulic System of the Loader Boom
LIANG Chun-zhi1,WANG Jun-liang2,LI Hui-qiong1
(1.Guangxi Liugong Machinery Co.,Ltd.,Liuzhou Guangxi 545000,China;2.School of Mechanical Engineering Guangxi University of Science and Technology,Liuzhou Guangxi 545000,China)
The loader arm manual correction device of the hydraulic system are complicated operation,only manual operation and low control precision,based on the analysis of the existing loader boom correction device principle,proposed a bidirectional electromagnetic combination valve,pressure retaining valve,pressure sensor,IO card control cylinder switch technology model boom intelligent correction hydraulic system.This paper introduces the principle and characteristics of the system,the selection of the main hydraulic components,and analyzes the operation process of the system.The system is used to correct the deformation of the flexible arm after loading,which has the characteristics of intelligent operation,maintaining pressure,simple structure,easy maintenance,high control ability and high precision.
moving arm correction;hydraulic system;automatic operation;holding pressure
TD422.3
B
1672-545X(2016)11-0156-03
2016-08-18
梁春芝(1982-),男,湖南涟源人,工程师,本科,主要从事结构件工艺、工艺装备设计工作;王俊梁(1991-),男,江苏泰州人,硕士研究生,主要研究机械结构与系统动力学。