上肢机器人辅助疗法对恢复期脑卒中患者上肢运动功能及日常生活活动能力的效果①
2016-12-29张超刘璇侯增广彭龙杨昊彭亮张皓洪毅
张超,刘璇,侯增广,彭龙,杨昊,彭亮,张皓,洪毅
上肢机器人辅助疗法对恢复期脑卒中患者上肢运动功能及日常生活活动能力的效果①
张超1,2a,刘璇1,2a,侯增广3,彭龙3,杨昊1,2a,彭亮3,张皓1,2b,洪毅1,2c
目的探讨上肢机器人辅助疗法对恢复期脑卒中患者上肢运动功能及日常生活活动能力的效果。方法2016年6~9月,本院12例恢复期脑卒中患者随机分为实验组(n=6)和对照组(n=6)。两组均进行常规康复训练,对照组增加上肢重复性运动训练,实验组增加上肢机器人辅助疗法训练,每天20m in,每周5 d,共4周。治疗前后分别采用Fugl-Meyer评定量表上肢部分(FMA-UE)评定上肢及手的运动功能,改良Ashworth量表(MAS)评定肩、肘关节肌张力,功能独立性评定(FIM)评定日常生活活动能力;记录患者每次训练的运动轨迹。结果治疗后,两组FMA-UE评分及FIM评分均较治疗前改善(Z>2.032,P<0.05);两组间无显著性差异(t<0.723,P>0.05),实验组评分略优于对照组。治疗后,实验组肩关节内收、外展MAS评分及肘关节屈曲、伸展MAS评分均较治疗前改善(Z>2.121,P<0.05);对照组肩关节内收、外展MAS评分均较治疗前降低(Z>2.000,P<0.05),肘关节屈曲、伸展MAS评分较治疗前无显著性差异(Z<1.890,P>0.05),但评分略低于治疗前。治疗后,实验组各项MAS评分较对照组均无显著性差异(Z<1.734,P>0.05),但评分略低于对照组。系统记录的患者进行直线触点运动时的运动轨迹,由最开始的杂乱无章逐渐变得有规律性,运动控制能力有所提高。结论上肢机器人辅助疗法可促进恢复期脑卒中患者上肢运动功能及日常生活活动能力的改善,效果与重复性运动训练相似。
脑卒中;上肢;机器人;重复性运动训练;康复;运动功能;日常生活活动能力
[本文著录格式]张超,刘璇,侯增广,等.上肢机器人辅助疗法对恢复期脑卒中患者上肢运动功能及日常生活活动能力的效果[J].中国康复理论与实践,2016,22(12):1365-1370.
CITED AS:Zhang C,Liu X,Hou ZG,etal.Effectsof upper limb robot-assisted therapy onmotor function and activities of daily living in patientsw ith convalescentstroke[J].Zhongguo Kangfu Lilun Yu Shijian,2016,22(12):1365-1370.
脑卒中是导致运动功能障碍的首要疾病之一,50%以上的脑卒中患者都会遗留有上肢及手的运动功能障碍[1]。这些运动功能障碍不仅影响到脑卒中患者的日常生活活动,还影响到社会交往活动,从而大大降低生活质量[2-3]。卒中后上肢功能的康复通常需要多学科、多领域的协作。循证医学指出高重复性的运动训练可以有效地提高脑卒中患者上肢的运动能力[4-5]。高重复性上肢运动可以有效地增加感觉运动输入,促使大脑产生运动计划,同时使肌肉达到适当的肌张力状态,从而有效地促进脑卒中患者上肢运动功能的恢复[6-7]。
目前国内外为了提高脑卒中患者的上肢运动功能及训练的积极性,除了依靠治疗师进行一些传统的康复训练,机器人辅助训练已经被逐步运用到临床[8-10]。近10年来,国外制造生产上肢康复机器人的技术迅猛发展,但是价格昂贵,治疗费用相对较高,会给患者带来较大的经济负担。中国科学院自主研发了一款上肢康复机器人。本文将探讨该上肢康复机器人对恢复期脑卒中患者上肢运动功能及日常生活活动能力(activitiesof daily living,ADL)的影响。
1 资料与方法
1.1 一般资料
2016年6~9月在本院住院治疗的脑卒中恢复期患者12例,诊断符合1995年全国第四届脑血管病学术会议通过的诊断标准[11],并经CT或MRI证实。
纳入标准:①一侧脑梗死或脑出血,初次发作;②年龄18~70岁;③病程>6个月;④意识清楚、心肺功能良好,生命体征平稳,能很好地配合训练;⑤单侧肢体有不同程度的运动功能障碍;⑥无视觉障碍;⑦无心理障碍;⑧对本研究知情同意。
排除标准:①伴有意识障碍或认知功能障碍,简易精神状态检查(M ini-Mental State Exam ination, MMSE)≤20分;②肌张力过高,Ashworth分级≥Ⅲ级;③严重肩、肘关节被动关节活动度受限;④严重肩痛;⑤并发严重的心、肺、肝肾疾病等;⑥多发癫痫。
入选患者按随机数字表法分为实验组和对照组,每组6例。两组性别、年龄、卒中类型、卒中侧别比较均无显著性差异(P>0.05)。发病时间实验组较对照组长(P<0.05)。见表1。
1.2 方法
1.2.1 上肢机器人辅助系统
上肢机器人CASIA-ARM是由中国科学院自动化研究所研究和开发的上肢康复辅助训练系统,可以通过前臂支撑器补偿患者手臂的部分重量,增强残留的功能和神经肌肉控制,从而进行主动运动。该上肢机器人可以支撑整个前臂,并可以提供以下自由度运动方向:肘关节屈/伸、肩关节水平内收/外展。此上肢机器人辅助训练装置拥有游戏库及情景模拟生物反馈系统来配合运动功能的训练,同时可以记录患者的运动轨迹。

表1 两组一般资料比较
1.2.2 训练方法
两组均接受常规康复训练,包括物理疗法训练和作业疗法训练。物理疗法训练每次45 m in,每天2次,每周5天,共4周;此训练基于Bobath理论,对患者进行运动功能训练,包括被动活动、坐位平衡训练、站立训练、步行训练、转移训练。作业疗法训练每天45m in,每天1次,每周5天,共4周;此训练包括滚筒训练、木钉盘活动、砂板磨活动、ADL指导。
对照组在常规康复训练的基础上增加1次徒手的重复性动作训练,每次20m in,每周5 d,共4周。此训练动作依据患者不同的功能状态进行设定,包括借助滚筒屈伸肘关节、桌面或墙面反复擦拭动作。
实验组在常规康复训练的基础上增加1次上肢机器人辅助治疗(中国科学院自动化设备所),每次20 m in,每周5 d,共4周。上肢机器人辅助治疗需有经验的治疗师进行设定,包括以下方面。①患者训练前进行2 m in患侧肢体被动活动。②治疗依据患者不同的运动功能状态及运动能力水平(共同运动阶段、部分分离运动阶段、分离运动阶段)选择游戏,每次选择3个游戏,每个游戏的时间一般为6m in。该机器人上肢辅助系统共包含5个游戏,进行游戏时,肢体起始位均为前臂中立位,肩关节前屈90˚,游戏由易到难依次为:接水果游戏(肩关节水平外展/内收)、十字触点游戏(肘关节屈曲/伸展,肩关节水平外展/内收)、由中心点向外辐射画圆(肘关节屈伸,肩关节水平外展/内收)、画圆(肘关节屈伸,肩关节水平外展/内收)、托球游戏(肘关节屈伸,肩关节水平外展/内收)。③每次训练结束后,治疗师可根据实际数据对患者的运动功能状态做出评价,并及时给予患者指导与鼓励。在1个月的训练中,治疗师可根据患者运动功能的提高调整游戏难度或更换游戏。④出现任何不适或危害患者生命健康的情况,应立即终止训练,查明原因后再决定是否继续进行机器人辅助训练。
1.3 评定方法
分别于训练前、训练4周后,由两名工作经验3年以上并对分组情况不知情的作业疗法师对两组患者进行评定。
1.3.1 Fugl-Meyer评定量表上肢部分(Fugl-Meyer Assessment-Upper Extrem ities,FMA-UE)
采用FMA-UE对脑卒中患者的上肢及手的运动功能进行评定。每个项目中,0分表示不能做某一动作;1分表示能部分做;2分表示能充分完成。总分66分,分值越高代表功能越好。
1.3.2 改良 Ashworth量表(modified Ashworth Scale, MAS)
采用MAS对脑卒中患者上肢肘关节进行肌张力测定,分为0~Ⅳ级,评级对应评分为0、1、1.5、2、3、4分,分值越高,痉挛程度越重。
1.3.3 功能独立性评定(Function Independent Measure, FIM)
采用FIM量表中的运动功能部分,对患者进行ADL评定。共13项运动性ADL评分,评分为7分制,最高为7分,最低为1分。分数越高,ADL越强。
1.3.4 直线触点运动轨迹
上肢机器人CASIA-ARM康复训练辅助系统,可以记录患者游戏时的运动轨迹,以判断运动的准确性及稳定性。
1.4 统计学分析
2 结果
两组治疗前FMA-UE评分及FIM评分均无显著性差异(P>0.05),治疗后均较治疗前改善(P<0.05)。治疗后,实验组FMA-UE评分及FIM评分较对照组均无显著性差异(P>0.05),但评分高于对照组。见表2、表3。
两组治疗前肩关节内收、外展的MAS评分及肘关节屈曲、伸展的MAS评分均无显著性差异(P>0.05);治疗后,实验组均较治疗前改善(P<0.05)。对照组肩关节内收、外展MAS评分均较治疗前降低(P<0.05),肘关节屈曲、伸展的MAS均较治疗前无显著性差异(P>0.05),但评分略低于治疗前。实验组肩关节内收、外展的MAS评分及肘关节屈曲、伸展的MAS评分较对照组均无显著性差异(P>0.05),但评分略低于对照组。见表4~表7。
实验组患者进行直线触点运动时的运动轨迹,分别为第1次训练、第8次训练、第18次训练,可以看出曲线由最开始的杂乱无章逐渐变得有规律性,运动主要集中在目标任务的运动方向。见图1~图3。
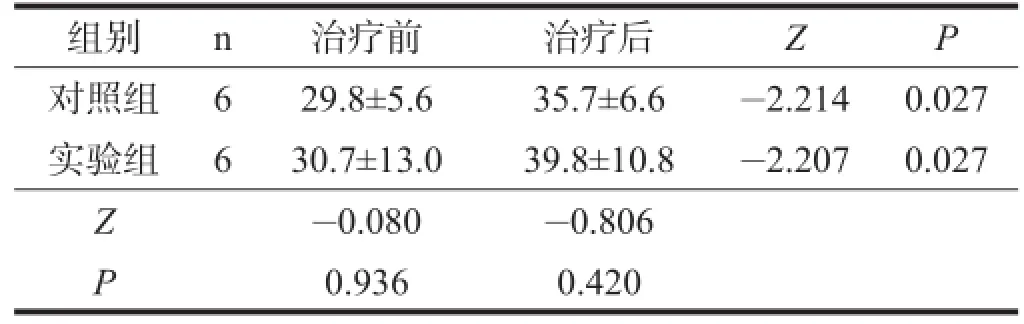
表2 两组治疗前后FMA-UE总评分比较
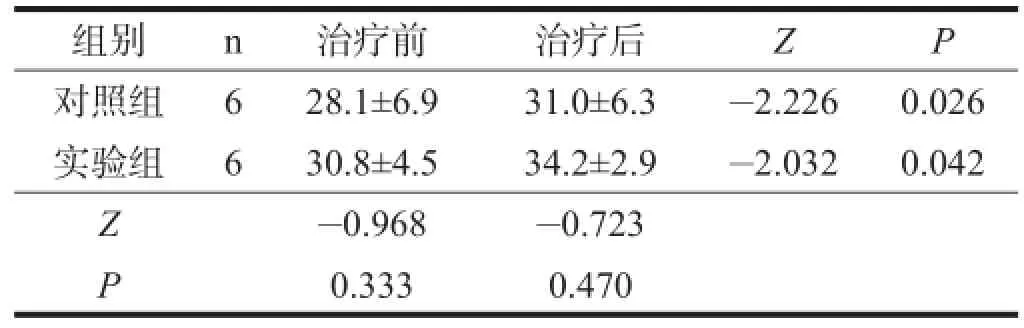
表3 两组治疗前后FIM评分比较

表4 两组治疗前后肩关节外展MAS评分
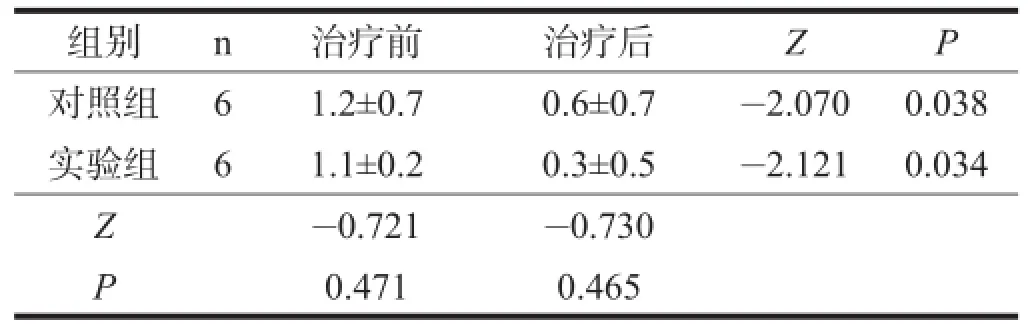
表5 两组治疗前后肩关节内收M AS评分
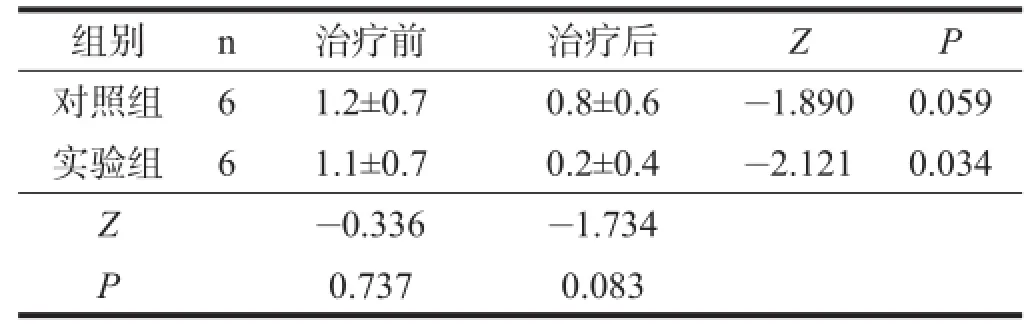
表6 两组治疗前后肘关节屈曲MAS评分
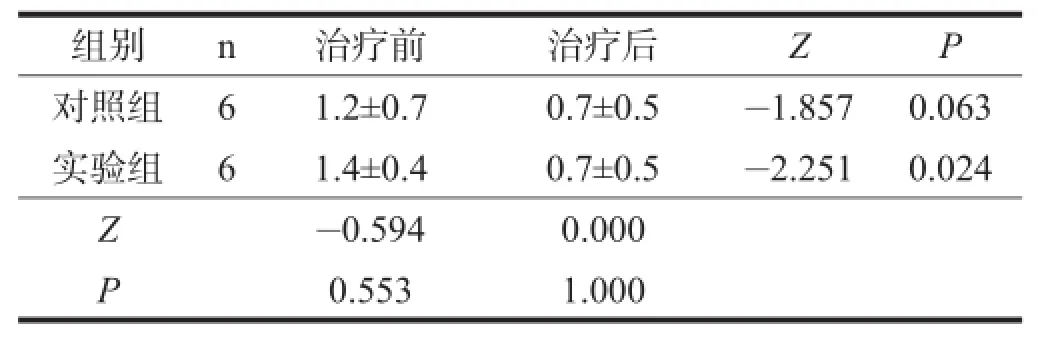
表7 两组治疗前后肘关节伸展MAS评分

图1 第1天患手为右侧的直线触电运动轨迹图
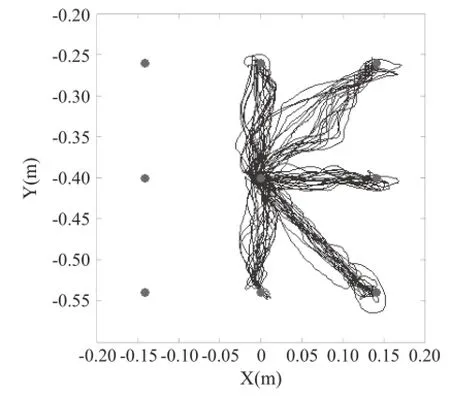
图2 第8天患手为右侧的直线触电运动轨迹图

图3 第18天患手为右侧的直线触电运动轨迹图
3 讨论
近年来,随着医疗技术的发展,脑卒中患者的致死率明显下降,而大部分脑卒中幸存者都会出现运动功能障碍[12]。55%~75%的脑卒中患者会有持续的上肢和手的运动功能障碍,从而导致日常生活质量下降[2]。康复治疗在帮助脑卒中患者恢复上肢及手运动功能和ADL方面起到积极的作用。在既往的研究中,没有任何一种疗法被证明是最有效的治疗脑卒中患者运动功能的方法,但是循证医学显示,高重复性的运动训练可以有效地帮助脑卒中患者提高运动能力[4]。
随着科学技术的发展,上肢机器人辅助系统也加入到脑卒中患者的康复训练中。此系统在支撑肢体部分重量的基础上,使患者可以进行高重复性的自主运动,从而促进运动功能恢复。此项技术在发达国家已经应用20余年,由于上肢机器人辅助系统众多,技术水平参差不一,国外对其疗效的研究结果也不尽相同[13-14]。在中国目前只有两篇科学研究探讨Armeo Spring上肢机器人辅助治疗(HOCOMA公司,瑞士)应用于急性期脑卒中的患者[15-16]。本文将CASIA-ARM应用于脑卒中恢复期患者,探讨其对患者上肢运动功能及ADL的影响。
本研究结果显示,实验组及对照组患者康复训练1个月后FMA-UE评分及FIM评分均较治疗前改善(P<0.05)。治疗后,两组间FMA-UE评分及FIM评分均无显著性差异(P>0.05),但评分高于对照组。说明此系统应用于恢复期脑卒中患者,可以达到与治疗师提供的传统治疗同样的治疗效果,且效果略优于传统治疗,可以有效地提高上肢运动功能及ADL的恢复。其作用机制可能有以下几点。①机器人上肢辅助系统可以提供上肢支撑系统,使患者较轻松地进行自主运动,不仅仅是依靠治疗师进行被动活动,而是通过主动运动有效提高患侧上肢运动能力[17-18]。②人的大脑有高度的可塑性,一定时间内高重复性运动训练不仅可以改善肢体运动功能,同时也能增加感觉信息的输入,对大脑进行反复刺激,通过其周围脑组织代替受损伤脑组织行使其原有功能[19-21]。③恢复期的患者已经进行过一段时间的传统康复治疗,有新仪器的介入,增加了治疗的趣味性,提高了患者训练的兴趣与积极性[22-23]。此系统对提高恢复期脑卒中患者ADL有一定帮助。一方面是由于患者运动功能有所提高,一方面应用此设备患者能进行更多时间的主动运动,从而鼓励患者在日常生活方面也尽可能多地提高自理能力。但由于此次临床试验时间较短,日后可多为患者安排上肢机器人辅助疗法,从而鼓励其多进行主动运动。对于恢复期的患者,随着肢体运动能力的提高,治疗师也应更加注重ADL和社会生活能力的改善。
实验组MAS评分也较训练前降低(P<0.05),且治疗后实验组肩关节内收、外展的MAS评分及肘关节屈曲、伸展的MAS评分较对照组均无显著性差异(P>0.05),但评分略低于对照组。说明此系统能有效帮助脑卒中患者降级患侧上肢肌张力,且效果略优于传统康复治疗。其作用机制可能为通过减重系统,抵消重力因素对上肢主动训练的影响,降低患者主动肌运动功能和体力的要求,从而在一定时间内能进行主动肌与拮抗肌的平衡训练。主动肌和拮抗肌反复运动,可以有效地帮助脑卒中患者协调肌张力,抑制肌张力过度增高及异常运动模式的出现[24]。
患者进行直线触点运动时的运动轨迹显示,曲线由最开始的杂乱无章逐渐变得有规律,运动主要集中在目标任务的运动方向。可见该患者的肢体协调性有所改善,运动控制能力有所提高。
上肢机器人辅助系统能在一定程度上减轻治疗师的体力负担,但对治疗师的专业评估能力及为患者选择适合游戏模式能力要求很高。上肢机器人辅助系统与常规的康复治疗相比较,还拥有情景模拟生物反馈系统和游戏库,治疗师要明确患者的功能状态,同时结合兴趣为其选择适合的游戏。使患者进行有针对性的、由易到难和大重复量的主动运动训练[25]。患者如进行20m in传统重复性动作训练,很容易注意力不集中,疲劳。此系统可以帮助患者改善注意力,保持体力,增加患者训练的兴趣和积极性。在治疗过程中,治疗师根据患者的情况,适时对患者的活动做出总结与鼓励,帮助患者树立康复的信心和主动康复的意愿。
综上所述,上肢康复机器人辅助治疗系统结合常规康复训练可以有效提高恢复期脑卒中患者的上肢运动能力及ADL,降低患者异常的肌张力,效果与重复性运动训练相似。
[1]Sarti C,Rastenyte D,Cepaitis Z,et al.International trends in mortality from stroke,1968 to 1994[J].Stroke,2000,31(7): 1588-1601.
[2]Mayo NE,Wood-Dauphinee S,Ahmed S,et al.Disablement follow ing stroke[J].DisablRehabli,1999,21(5-6):258-268.
[3]江晓峰,胡雪艳,熊国星,等.社区脑卒中康复适宜技术对脑卒中患者社会功能活动的影响[J].中国康复理论与实践,2011, 17(2):178-180.
[4]French B,Thomas LH,Leathley MJ,etal.Repetitive task training for improving functional ability after stroke[J].Cochrane Database SystRev,2007(4):CD006073.
[5]Diserens K,Perret N,Chatemain S,etal.The effect of repetitive are cycling on post stroke spasticity andmotor control:repetitive arm cy-cling and spasticity[J].JNeurol Set,2007,253 (1-2):18-24.
[6]Van Peppen RP,Kwakkel G,Wood-Dauphinee S,etal.The impact of physical therapy on functional outcomes after stroke: w hat's the evidence?[J].Clin Rehabil,2004,18(8):833-862.
[7]Kwakkel G,Kollen B,Lindeman E.Understanding the pattern of functional recovery after stroke:facts and theories[J].Restor Neurol Neurosci,2004,22(3-5):281-299.
[8]Norouzi-Gheidari N,Archambault PS,Fung J.Effects of robot-assisted therapy on stroke rehabilitation in upper limbs: systematic review and meta-analysis of the literature[J].JRehabilResDev,2012,49(4):479-496.
[9]Klamroth-Marganska V,Blanco J,Campen K,et al.Three-dimensional,task-specific robot therapy of the arm after stroke:a multicentre,parallel-group randomised trial[J].Lancet Neurol, 2014,13(2):159-166.
[10]Masiero S,ArmaniM,FerliniG,et al.Random ized trial of a robotic assistive device for the upperextremity during early inpatient stroke rehabilitation[J].Neurorehabil Neural Repair, 2014,28(4):377-386.
[11]全国第四届脑血管病学术会议.各类脑血管病诊断要点[J].中华神经科杂志,1996,29(6):379-380.
[12]Dobkin BH.Strategies for stroke rehabilitation[J].Lancet Neurol,2004,3(9):528-536.
[13]Cooke EV,Mares K,Clark A,et al.The effects of increased dose of exercise-based therapies to enhancemotor recovery after stroke:a systematic review and meta-analysis[J].BMC Med,2010,8:60.
[14]Sivan M,O'Connor RJ,Makower S,etal.Systematic review of outcomemeasures used in the evaluation of robot-assisted upper limb exercise in stroke[J].JRehabil Med,2011,43(3): 181-189.
[15]孙莹,花佳佳,施加加,等.运动反馈训练对偏瘫患者上肢运动功能和日常生活活动能力的疗效[J].中国康复,2015,30 (6):409-411.
[16]何斌,张超,刘璇.上肢机器人辅助疗法对急性期脑卒中患者上肢运动功能的效果[J].中国康复理论与实践,2016,22(6): 688-692.
[17]LiaoWW,Wu CY,Hsieh YW,etal.Effects of robot-assisted upper limb rehabilitation on daily function and real-world arm activity in patients with chronic stroke:a random ized controlled trial[J].Clin Rehabil,2012,26(2):111-120.
[18]Kwakkel G,Kollen BJ,Krebs HI.Effects of robot-assisted therapy on upper limb recovery after stroke:a systematic review[J].Neurorehabil Neural Repair,2008,22(2):111-121.
[19]Nudo RJ.Recovery after damage to motor cortical areas[J]. CurrOpin Neurobiol,1999,6:740-747.
[20]Levin MF,K leim JA,Wolf SL.W hatdomotor"recovery"and "compensation"mean in patients follow ing stroke?[J].NeurorehabilNeuralRepair,2009,23(4):313-319.
[21]M cDowd JM,Filion DL,Pohl PS,et al.Attentional abilities and functionaloutcomes following stroke[J].JGerontol B Psychol SciSoc Sci,2003,58(1):45-53.
[22]Iehikawa A,Yamamoto H,Ono I,et al.Stimulus-related 20-Hz activity of human cortex modulated by the way of presenting hand actions[J].NeurosciRes,2007,58(3):285-290.
[23]Stein J.Robotics in rehabilitation:Technology as destiny[J]. Am JPhysMed Rehab,2012,91(11):199-203.
[24]Cauraugh JH,Summers JJ.Neural plasticity and bilateral movements:a rehabilitation approach for chronic stroke[J]. Prog Neurobiol,2005,75(5):309-320.
[25]Burgar CG,Lum PS,Screm in AM,et al.Robot-assisted upper-limb therapy in acute rehabilitation setting following stroke:Department of Veterans A ffairs multisite clinical trial[J].JRehabilResDev,2011,48(4):445-458.
Effects of Upper Limb Robot-assisted Therapy on Motor Function and Activities of Daily Living in Patientsw ith Convalescent Stroke
ZHANG Chao1,2a,LIU Xuan1,2a,HOU Zeng-guang3,PENG Long3,YANG Hao1,2a,PENG Liang3,ZHANG Hao1,2b, HONG Yi1,2c
1.CapitalMedical University Schoolof Rehabilitation Medicine,Beijing 100068,China;2.a.Departmentof Occupational Therapy,b.Department of Neurorehabilitation(K3),c.Departmentof Spinal Surgery,Beijing Bo'ai Hospital, China Rehabilitation Research Center,Beijing 100068,China;3.State Key Laboratory of Managementand Control for Complex Systems,InstituteofAutomation,ChineseAcademy of Sciences,Beijing 100190,China
ObjectiveTo explore the effectsof upper limb robot-assisted therapy onmotor function and activitiesof daily living in convalescentstroke patients.MethodsFrom June to September,2016,12 chronic stroke patients at their first-ever strokewereenrolled and random ized into experimentalgroup(n=6)and controlgroup(n=6).Both groups received routine rehabilitation.Additional robot-assisted therapy was provided to the experimental group,and additional repetitivemovement training was provided to the control group,20m inutes a day,five days a week for fourweeks.Fugl-Meyer Assessment-Upper Extrem ities(FMA-UE),modified Ashworth Scale(MAS)and Functional IndependentMeasure(FIM)were used to assess themotor function of the upper limbs and hands,themuscular tension of shoulder and elbow,and activitiesof daily living(ADL)beforeand after treatment.ResultsAfter treatment,the scoresof FMA-UEand FIM werebetter in both groups(Z>2.032,P<0.05),and no significant difference was found between two groups(t<0.723,P>0.05),however,the scores were a little bithigher in the experimental group than in the control group.A fter treatment,for the experimental group,the MAS scores of shoulder abduction/adduction and elbow flexion/extension improved(Z>2.121,P<0.05);for the controlgroup,the MAS scores of shoulder abduction/adduction improved(Z>2.000,P<0.05),but the MAS scores of elbow flexion/extension were not significantly different(Z<1.890,P>0.05).Therewas no significant difference in the MAS scores of shoulder abduction/adduction and elbow flexion/extension between two group(Z<1.734,P>0.05).Themoving trail recorded by the computer,gradually became a regular pattern from themass,saying themotor control ability became better.ConclusionUpper limb robot-assisted therapy can promote the recovery of themotor function of upper limbs and ADL in convalescentstroke patient,similar to the repetitivemovement training.
stroke;upper limb;robotics;repetitivemovement training;rehabilitation;motor function;activitiesof daily living
10.3969/j.issn.1006-9771.2016.12.001
R743.3
A
1006-9771(2016)12-1365-06
2016-09-30
2016-10-21)
1.首都医科大学康复医学院,北京市100068;2.中国康复研究中心北京博爱医院,a.作业疗法科,b.神经康复科,c.脊髓脊柱损伤外科,北京市100068;3.中国科学院自动化研究所,复杂系统管理与控制国家重点实验室,北京市100190。作者简介:张超(1985-),女,汉族,北京市人,主管治疗师,主要研究方向:脑卒中康复、手外伤康复。通讯作者:刘璇(1965-),女,汉族,北京市人,副主任治疗师,主要研究方向:脑卒中康复、康复治疗学。E-mail:yq1967lx@sina.com。
