基于导航点改进Gauss伪谱法规划滑翔导弹航迹
2016-12-22牛晓洁李邦杰舒健生潘乐飞杨奇松
牛晓洁,李邦杰,舒健生,潘乐飞,杨奇松
(火箭军工程大学 初级指挥学院,西安 710025)
基于导航点改进Gauss伪谱法规划滑翔导弹航迹
牛晓洁,李邦杰,舒健生,潘乐飞,杨奇松
(火箭军工程大学 初级指挥学院,西安 710025)
为了研究滑翔导弹的航迹规划问题,利用优化理论,规划了多约束条件下导航点之间的航迹。基于导航点位置改进Gauss伪谱法(Gauss pseudospectral method,GPM),利用改进GPM离散控制变量和状态变量,将最优控制问题转化为非线性规划问题,利用改进序列二次规划算法求解。GPM求解分段航迹规划问题,需要迭代获取下段航迹的飞行时间,降低了算法效率。改进GPM能够有效弥补单纯以时间为自变量带来的诸多规划中的不足,具有更为宽泛的优化目标适应能力。算例结果表明,改进后的算法能够准确、高效地规划一条合理的航迹,满足飞行约束条件。
滑翔导弹;航迹规划;改进高斯伪谱法
助推-滑翔导弹是高科技战争中常实施的杀手锏之一,其航迹规划问题作为关键技术之一值得研究[1]。早期的研究采用解析法求解轨迹优化问题,但由于在处理复杂的非线性系统时力不从心,学者们开始把研究焦点转向数值方法,一般分为间接法和直接法[2]。近些年,直接法中的伪谱法由于其高精度、高效率,在轨迹优化方面得到了广泛的应用[3]。高斯伪谱法[4]是2005年由麻省理工的Benson给出的一种新的求解最优控制问题的直接方法,并从理论上证明了高斯伪谱法与最优控制理论中的一阶必要条件是一致的。GPM是将状态变量和控制变量在一系列Gauss点上进行离散,最终可将最优控制问题转化为受一系列代数约束的参数优化问题,即非线性规划问题[5]。
许多文章都对GPM进行了研究,主要分为3大类:一是给定相应的指标泛函设计航迹,如文献[6]以最大横程为优化指标,利用高斯伪谱法求解了升力式飞行器的再入轨迹,文献[7]基于高斯伪谱法以飞行时间为优化指标对滑翔弹道进行了优化设计;二是建立模型解决轨迹优化问题,如文献[8]基于高斯伪谱法研究了助推-滑翔飞行器多阶段轨迹优化问题,文献[9]针对瞄准对抗问题建立了多阶最优控制模型,基于GPM对飞机瞄准目标问题进行了研究;三是利用GPM对控制系统进行设计,如文献[10]利用Gauss伪谱法对滑翔段到巡航段的过渡段控制率进行了设计。
GPM对时间变量进行归一化处理,求解分段航迹规划问题时,需要迭代获取下段航迹的飞行时间,增加了计算量,降低了算法效率。提出了一种利用导航点位置改进GPM的新思路,以经度或者纬度为自变量进行归一化处理。由于导航点位置可以提前确定,在求解分段航迹规划问题时,避免了因为迭代时间导致的算法效率降低的问题。本文中以经度或者纬度为自变量的GPM方法,可以有效地弥补单纯的以时间为自变量带来的诸多规划中的不便,具有更为宽泛的优化目标适应能力,以满足诸如速度控制、能量管理等优化目标。文中以经度为例进行算法设计,并进行了仿真验证。
1 滑翔段轨迹优化问题
1.1 无动力滑翔运动模型
考虑地球为旋转圆球时,高超声速飞行器无动力再入运动方程为[11]
(1)
式中:ω,r,v,γ,ψ,λ,B,γc,Fx,Fy分别为地球自转角速度、地心距、速度、飞行路径角、航向角、经度、纬度、倾侧角、气动升力和阻力。航迹角是速度向量与当地水平面的夹角,向上为正。航向角是速度向量在当地水平面投影与正北方向的夹角,顺时针旋转为正。
文中研究导航点之间的航迹规划问题均在滑翔段完成,在北天东坐标系下确定导航点位置后,滑翔导弹飞行的纵向二维平面也就确定了。为了便于研究,该段航迹规划时,假设忽略射面外的运动,仅以二维即只关注射面内的飞行参数,则规划式的动力学模型与动力学模型都如下式所示:
(2)
式中:u,vr,Θ,h分别为切向速度、法向速度、速度倾角和高程。
1.2 约束条件
为保证飞行器在滑翔段飞行的稳定性,本文考虑了滑翔过程中的相关约束条件,包括控制量约束和弹道约束:热流密度、动压和过载等[12]。
1.2.1 控制约束
考虑导弹滑翔过程的实际情况,控制量应满足一定约束,即
αmin≤α≤αmax
(3)
设定攻角的变化范围为10°~20°,变化率不超过5(°)/s,基于三自由度模型,假定控制系统能够保证导弹在竖直平面内滑翔飞行,文中取导航点之间导弹飞行的纵向二维平面与东天面的夹角为定值。
1.2.2 热流约束
(4)

1.2.3 动压约束
q=ρv2/2≤qmax
(5)
式中:ρ为大气密度,文中取飞行器可承受的最大动压qmax=60kPa。
1.2.4 过载约束
(6)
式中:CD,CL,S分别为气动阻力系数、升力系数和气动参考面积。左边表达式为法向气动过载,右边为飞行器可以承受的最大过载,文中取nmax=4。
2 改进思路及模型
2.1 改进思路
GPM改进背景及思路:在滑翔导弹滑翔过程中,处于某一位置时相对于开始时刻的时间不能很好、快速地获取,但所处位置的经纬度能够通过计算得出,若是能对经纬度进行归一化处理,将原有GPM中速度对时间求导的约束条件转化为速度对经纬度求导的约束条件,将会简化问题的复杂程度,提高计算效率。
2.2 经纬度归一化模型
已知两导航点经、纬度坐标,可以求得相对于北天东坐标系下两导航点间的弧线段与Oxz平面之间的夹角σ,以及弧线段在经、纬度方向的跨度大小。根据跨度大小决定以纬度B或经度λ为基准进行归算处理,即若经度λ方向跨度大就将经度λ归算到τ。
(7)
2.2.1 经度归一化
改进GPM将2个导航点之间对应的经度λ标准化为区间τ∈[-1,1]之间的量,因此对经度作如下变换:

(8)
可以看出经度λ与τ呈现一一对应的关系,并且单调递增。
对应的高程变量有:
(9)
其他状态变量同理可得。
2.2.2 高斯伪谱法配点选择
综合考虑航迹规划问题,程序中采用K阶Legendre多项式的根以及τ0=-1作为离散节点,Legendre多项式为
(10)
2.2.3 状态变量和控制变量选择
在航迹规划时,选择攻角作为控制量。由于K阶Legendre多项式共有K+1个根,则作为控制量的攻角可表示为
α=(α1α2…αK+1)
(11)
状态量在对应时域下的值为
(12)
2.2.4 拉格朗日插值函数
状态变量为
(13)
2.2.5 构造等式约束
将式(7)与经状态变量表达式求导后的函数式联立,可得等式约束式为
(14)
2.2.6 目标函数
为了提高航迹规划的效率,文中选择最短滑翔时间作为性能指标泛函:
(15)
3 求解优化问题的算法流程
3.1 航迹规划问题流程分析
首先利用改进GPM离散最优控制问题,利用二次规划算法,求解近似原问题的二次规划子问题来近似求解原问题。将典型二次规划问题进行简化分析,转化为只含等式约束的最优控制问题,利用起作用约束集法调用拉格朗日算法,迭代更新起作用集和可行解,最终求得航迹规划问题的最优解。具体流程图如图1所示。
3.2 C++环境下程序构架
在C++环境下编写程序实现改进GPM离散最优控制问题,使用起作用集法求解二次规划子问题。
①构造等式约束。
程序中以K阶Legendre多项式的根为配点以及τ0=-1作为插值节点,利用拉格朗日插值函数求微分来近似式(7)运动模型中的左函数,之后与函数联立,构造等式约束式。相对于状态变量而言,每个节点对应3个等式约束,K+1个节点就对应3(K+1)个等式约束式。相对于控制变量而言,每个节点对应一个等式约束,所以二次规划问题总共对应3(K+1)+K+1个等式约束。
利用高斯积分简化目标函数,求解等式约束式以及目标函数的梯度。
②求取函数初值。
以往SQP法解二次规划子问题时,首先需要求解线性规划式,判断给定的初始解是否可行,之后进行下一步的计算。这种方法对初值较为敏感,计算较为复杂。
文中在C环境下编写程序时,只是给出了正定矩阵,利用拉格朗日函数求解下降方向向量,同时以此作为二次规划子问题的初始可行解。与经典序列二次规划算法相比,简化了算法流程,通过仿真验证了算法的高效性和合理性。
③二次规划寻优。
首先根据等式约束,确定初始起作用集和非起作用集。使用拉格朗日法求解只含有起作用集约束的线性规划问题,根据相关判定条件迭代更新起作用集和问题可行解,最终求出二次规划子问题的最优解,也即是原先二次规划问题的最优解。
4 算例分析
以远程高超声速滑翔式再入飞行器为仿真对象,气动参数采用美国波音公司98年设计的CAV-H相关参数拟合得到[15],其最大升阻比为3.5;气动参考面积为0.484m2;质量为907.2kg;最大飞行攻角和最大升阻比攻角分别为20°和10°;起始导航点经度、纬度、高程分别为29°,72°和60.37km;目标导航点经纬度坐标、高程分别为87°,74°和48.8km;滑翔开始时刻的速度为6 606m/s,最大飞行高度为70km,约束条件如1.2节所示。
取5阶LG点以及τ0=-1作为插值节点,优化计算在CPU为3.4GHz/Corei3,操作系统为WindowsXP系统的微机上实现,VisualStudio2010环境下编写程序,以时域变换为基础的Gauss伪谱法求解上述算例需要0.078s,使用文中改进后的算法规划航迹的时间为0.016s。两者对比可知,后者在满足飞行约束条件的基础上大大缩短了航迹规划所需的时间。
优化计算结果见图2。图2(a)中攻角变化曲线表明,滑翔导弹长时间保持最大升阻比攻角飞行,在起始导航点和目标导航点位置确定的情况下保证了最短飞行时间这一优化指标;图2(b)中速度倾角始终为负值,说明滑翔导弹始终朝向目标点飞行,保证了最短飞行时间的优化指标;图2(c)、图2(d)中速度、飞行高度都能够满足终端约束条件限制;图2(e)、图2(f)、图2(g)中过载、动压和热流密度的变化均在给定的变化范围内,满足飞行过程中的约束条件。仿真结果表明,在满足相同约束条件的前提下,与以往相比,利用改进后的GPM能够准确、高效地规划出一条合理的航迹。
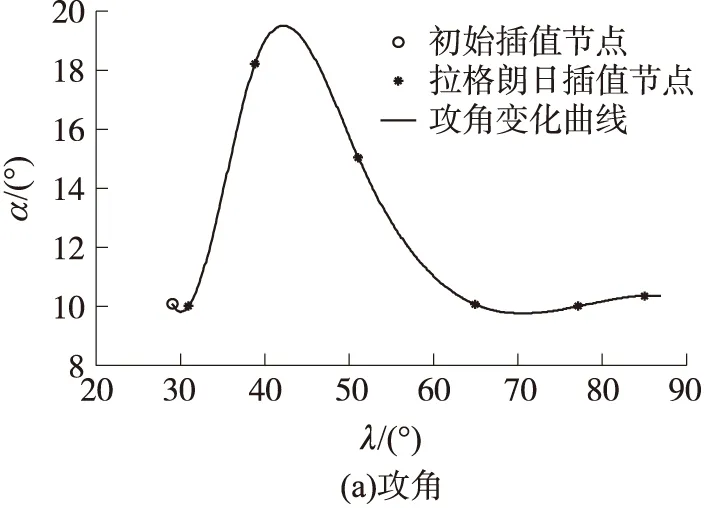
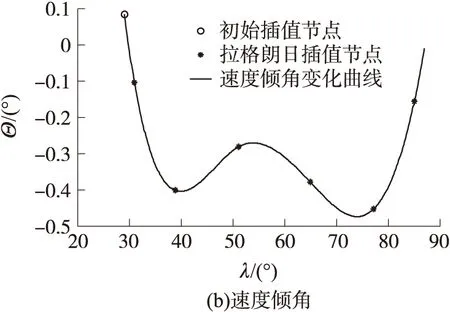
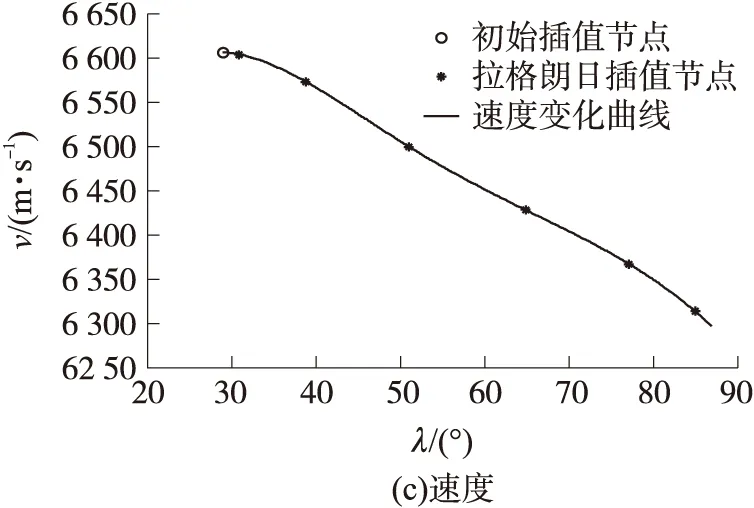
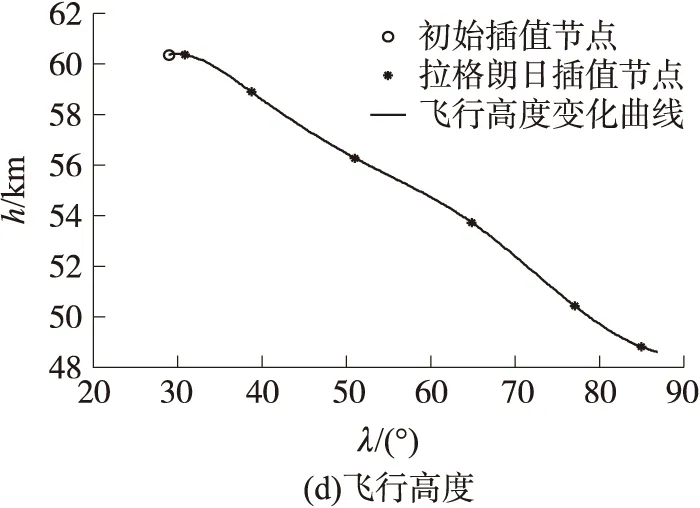

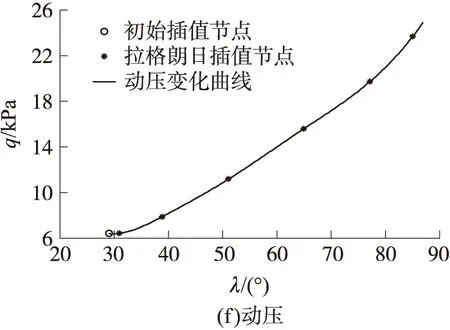
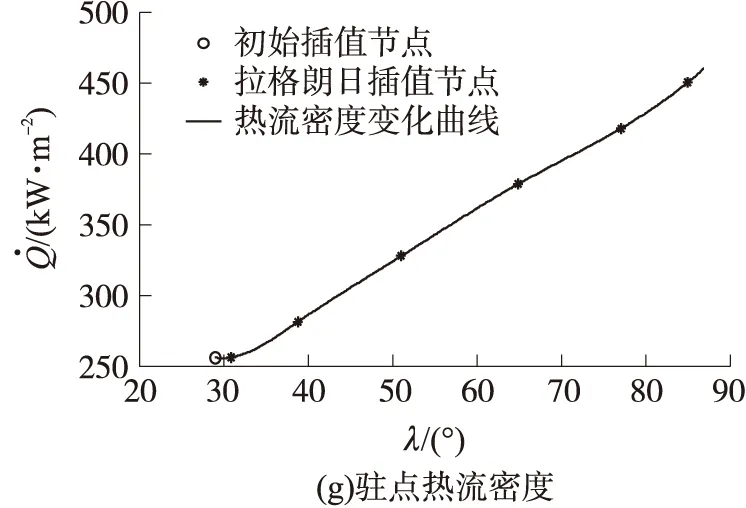
图2 航迹规划结果
5 结束语
文中基于导航点位置改进GPM,利用改进后的算法对滑翔导弹导航点之间的航迹进行了优化求解,并选取最短飞行时间作为优化指标,在满足各种飞行约束的条件下,将攻角作为控制变量进行优化,得到了滑翔段导航点之间的最优航迹。从本文的研究中可以看出,文中改进后的算法与以往GPM相比,跳出了飞行时间的限制,在已知导航点位置后,滑翔导弹的纵向飞行平面也就随之确定,简化了运动模型,减少了计算量,缩短了求解航迹规划问题所用的时间。文中的研究成果可为滑翔导弹在线航迹规划提供一定的技术支撑,但文中改进算法是在地球为旋转圆球的基础上提出的,与实际不太相符,下一步将以地球椭球为背景设计研究相应的改进算法。
[1] 孟中杰,黄攀峰,闫杰.基于改进稀疏A*算法的高超声速飞行器航迹规划技术[J].西北工业大学学报,2010,28(2):182-186. MENG Zhong-jie,HUANG Pan-feng,YAN Jie.Exploring trajectory planning for hypersonic vehicle using improved sparse A* algorithm[J].Journal of Northwestern Polytechnical University,2010,28(2):182-186.(in Chinese)
[2]BETTS J T.Survey numerical methods for trajectory optimiza-tion[J].AIAA Journal of Guidance Control and Dynamics,1998,21(2):193-207.
[3]胡松启,陈雨.伪谱法在飞行器轨迹优化中应用分析[J].火箭推进,2014,40(5):61-68. HU Song-qi,CHEN Yu.Analysis of pseudo-spectral methods applied to aircraft trajectory optimization[J].Journal of Rocket Propulsion,2014,40(5):61-68.(in Chinese)
[4]BENSON D A.A Gauss pseudospectral transcription for optimal control[D].Massachusetts:Massachusetts Institute of Technology,2005.
[5]唐国金,罗亚中,雍恩米.航天器轨迹优化理论、方法及应用[M].北京:科学出版社,2011. TANG Guo-jin,LUO Ya-zhong,YONG En-mi.Theory,method and application of spacecraft trajectory optimization[M].Beijing:Science Press,2011.(in Chinese)
[6]周文雅,杨涤,李顺利.利用高斯伪谱法求解具有最大横程的再入轨迹[J].系统工程与电子技术,2010,32(5):1 038-1 042. ZHOU Wen-ya,YANG Di,LI Shun-li.Solution of reentry trajectory with maximum cross range by using Gauss pseudospectral method[J].Systems Engineering and Electronics,2010,32(5):1 038-1 042.(in Chinese)
[7]李铁鹏,王中原,陈琦,等.基于高斯伪谱法的滑翔弹道优化算法研究[J].弹箭与制导学报,2014,34(2):113-116. LI Tie-peng,WANG Zhong-yuan,CHEN Qi,et al.Study of gliding trajectory optimization algorithm based on Gauss pseudospectral method[J].Journal of Projectiles,Rockets,Missiles and Guidance,2014,34(2):113-116.(in Chinese)
[8]GUAN Cheng-qi,CHEN Cong.Multiphase path-constrained trajectory optimization for the boost-glide vehicle via the Gauss pseudospectral method[J].Journal of Astronautics,2010,31(11):2 512-2 518.
[9]程建锋,董新民,薛建平,等.基于Gauss伪谱法的飞机最优目标瞄准控制[J].计算机应用,2013,33(11):3 291-3 295. CHENG Jian-feng,DONG Xin-min,XUE Jian-Ping,et al.Aircraft optimal target aiming control based on Gauss pseudospectral method[J].Journal of Computer Applications,2013,33(11):3 291-3 295.(in Chinese)
[10]汪立新,冷杉,王建华.基于Gauss伪谱法的导弹过渡段控制律设计[J].控制工程,2013,20(5):906-909. WANG Li-xin,LENG Shan,WANG Jian-hua.Design of control law of transition zone of missile based on Gauss pseudospectral method[J].Control Engineering of China,2013,20(5):906-909.(in Chinese)
[11]BOLLINO K P,ROSS I M.A pseudospectral feedback method for real-time optimal guidance of reentry vehicles[C]//Proceedings of the American Control Conference.New York:American Control Conference,2007:3 861-3 867.
[12]冯林爽,刘磊,王永骥.基于PSO和SQP混合优化算法的高超声速飞行器轨迹优化[C]//2015 IEEE Chinese Control and Decision Conference.Qingdao:IEEE,2015:4 518-4 522. FENG Lin-shuang,LIU Lei,WANG Yong-ji.Trajectories optimization of hypersonic vehicle based on a hybrid optimization algorithm of PSO and SQP[C]//2015 IEEE Chinese Control and Decision Conference.Qingdao:IEEE,2015:4 518-4 522.(in Chinese)
[13]张科南,周浩,陈万春.高超声速飞行器多约束多种机动突防模式弹道规划[J].弹道学报,2012,24(3):85-90. ZHANG Ke-nan,ZHOU Hao,CHEN Wan-chun.Trajectory planning for hypersonic vehicle with multiple constraints and multiple maneuvering penetration strategies[J].Journal of Ballistics,2012,24(3):85-90.(in Chinese)
[14]刘建业,曾庆化,赵伟,等.导航系统理论与应用[M].西安:西北工业大学出版社,2010. LIU Jian-ye,ZENG Qing-hua,ZHAO Wei,et al.Navigation system theory and application[M].Xi’an:Northwestern Polytechnic University Press,2010.(in Chinese)
[14]DARBY C L,HAGER W W,RAO A V.An hp-adaptive pseudospectral method for solving optimal control problems[J].Optimal Control Applications and Methods,2011,32(4):476-502.
Trajectory Planning for Gliding Missile Via Improved Gauss Pseudospectral Method Based on Navigation Points
NIU Xiao-jie,LI Bang-jie,SHU Jian-sheng,PAN Le-fei,YANG Qi-song
(Primary Command College,Rocket Force University,Xi’an 710025,China)
In order to study the trajectory planning problem of glide missile,the trajectory of the navigation points under the multi-constraint conditions was planned by using optimization theory.The improved Gauss pseudospectral method(GPM)was based on navigation points.The control variables and state variables were discretized by improved GPM,and the optimal control problem was converted into a nonlinear programming problem,and the problem was solved by using the improved sequential quadratic programming(SQP)method.When the segment path is planned by GPM,the flight time of the next trajectory is obtained via iterative method,and the efficiency of the algorithm is reduced.The improved GPM can effectively compensate the lack of time being taken as the independent variable in many trajectory planning,and it has a wider adaptability to optimize the target.The results show that the improved algorithm can accurately and efficiently plan a reasonable trajectory to meet the flight constraints.
glide missile;trajectory planning;improved Gauss pseudospectral method(GPM)
2016-06-30
牛晓洁(1992- ),男,硕士研究生,研究方向为飞行器总体、结构分析与飞行力学。E-mail:18706766973@163.com。
V412.4
A
1004-499X(2016)04-0036-06
