不完全齿轮与曲柄摇杆的无碳小车设计
2016-12-20陈俊君
徐 冰, 印 江, 陈俊君
(山西大学 自动化系,山西 太原 030013)
不完全齿轮与曲柄摇杆的无碳小车设计
徐 冰, 印 江, 陈俊君
(山西大学 自动化系,山西 太原 030013)

针对山西省大学生工程训练综合能力竞赛的主题,设计了一种将重力势能转化为动能且自动绕行“8”字轨迹的小车。首先,通过Matlab软件模拟计算出小车绕行的最佳“8”字轨迹,根据轨迹的大小确定小车后轮直径和齿轮机构的传动比;然后,通过不完全齿轮和曲柄摇杆机构相结合来设计小车的自动换向系统,当不完全齿轮有齿部分和无齿部分周期性地进入啮合时,小车相应地绕行“8”字轨迹的非圆弧部分和圆弧部分;最后,采用UG NX软件对小车的各组成机构进行三维建模、装配及运动仿真。在仿真取得理想的效果后,对小车进行加工制作与调试。经过参加省赛的实践检验,证明了该机构设计的合理性。
无碳小车; “8”字轨迹; 不完全齿轮机构; 曲柄摇杆机构
0 引 言
2014年山西省大学生工程训练综合能力竞赛的主题为“无碳小车越障竞赛”[1-3]。要求设计一种能够将重力势能转化为动能驱动小车自动行走换向的装置,如图1所示。该重力势能由质量为1 kg的标准砝码(∅50 mm×65 mm,碳钢制作)下降(400±2)mm的高度来获取。同时要求小车具有转向控制机构,实现在间距300、400或500 mm的两个障碍物间绕行“8”字功能[4-7],如图2所示。对此,本文设计了一种利用不完全齿轮和曲柄摇杆机构进行转向的小车,该机构具有简单可靠,转向灵活准确的特点,能够较好地实现在不同的障碍物间绕行“8”字轨迹的功能。
1 小车运行轨迹的分析
设计“8”字轨迹的难点在于小车在2个距离很近的障碍物间绕行时需要转过很大的角度,由于车长和车宽值都必须尽可能的小,所以小车在绕行过程中极易出现撞上障碍物甚至重心不稳导致倾覆。为使小车行走过程中能够平稳、尽可能多地绕过障碍物,所设计的小车运行轨迹应尽可能饱满些[8],整个轨迹长度也应该尽量短一些。这样可以在小车消耗尽能量之前绕行更多的“8”字。山西省赛要求障碍物距离为300、400或500 mm,比赛时随机抽取绕障距离。现取绕障距离为400 mm,设小车的运行轨迹由两段圆弧和两段正弦曲线组成[9],如图3所示。

图1 无碳小车示意图(mm)

图2 “8”字绕障所用乒乓球台及障碍设置
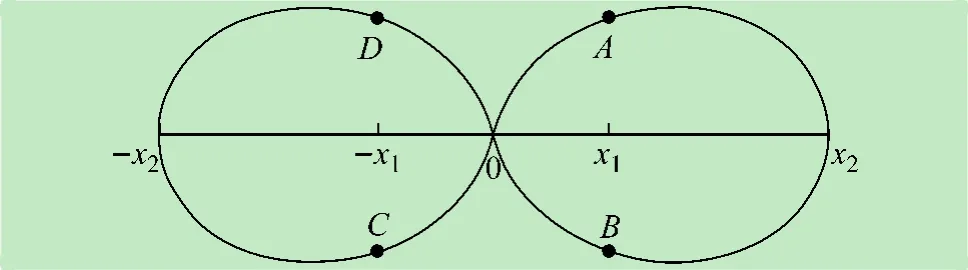
图3 “8”字轨迹示意图
AB段的轨迹为
y=φR,x1≤x≤x2
(1)
式中:φ为AB段优弧所对应的圆心角的弧度值;R为圆弧轨迹的半径。
由式(1)可知,CA段轨迹上任意点的曲率半径为
(2)
为保证小车运行平稳,在CA段轨迹与AB段的轨迹交汇处,曲率不可突变,因而有:ρx=x1=R,经过Matlab数值分析后,发现取f=R=240 mm,T取160 mm较为合理,此时前轮转角应为67.5°
2 小车结构设计
2.1 原动机构设计
由于小车运转过程中所有能量均来自砝码的重力势能,所以动力转换机构应能够实现简洁、高效地将重力势能向动能的转换。比较简单、可靠的方法是,利用耐磨、强度高的细线和定滑轮机构来实现,细线的一端拴在砝码钩上;另一端绕在绕线轴上,而绕线轴与驱动轮轴固连在一起,这样在砝码下落过程中,重力势能就可以转换为驱动轮轴上的转矩,进而带动主动轮实现走行功能。绕线轴直径的大小对小车能否启动及车速的稳定性都有着重要的影响。合理的绕线轴直径应能保证小车顺利启动,启动后能够平稳匀速地完成绕障功能。对此,本文将绕线轴设计成锥形,在小车启动时需要较大力矩,此时线绕在粗端,小车顺利启动后,线逐渐向细端进行绕线,实现小车匀速稳定运行。由于小车在转弯时,两轮的轮速不同,如果两个后轮同时作为驱动轮的话,小车容易因差速问题出绕行轨迹精度变差甚至是倾覆,严重影响绕障效果。为了解决差速问题,本文借鉴三轮车的工作原理,直接使用单轮驱动的方法,将后轮中的一个与驱动轴固结在一起,实现和驱动轴的同步转动,而另一个则作为从动轮通过轴承套在轴上,在运行过程中自动调整其转速。
2.2 传动机构设计
传动机构的作用是把动力和运动传递给驱动轮和转向机构。为了使小车在允许的误差内绕障数目更多,传动机构应传递效率高、平稳可靠、结构简单等。齿轮传动效率很高,可达98%左右[10],同时还具有工作可靠、结构紧凑、传动比稳定的特点。因此本设计方案选择了两对齿轮进行啮合传动[11],其中一对齿轮为不完全齿轮,与曲柄摇杆机构相连,实现换向功能。根据障碍物间距的不同,本文采用了变传动比的方式实现传动。设绕障距离为400 mm的小车运行轨迹长度为L,将后轮直径d定为120 mm,则根据齿轮机构的传动比:
i=L/(πd)
(3)
计算出绕障距离300、400、500 mm下齿轮的传动比分别为6、8、10。
2.3 转向机构设计
转向机构通过控制前轮摆角的变化来实现小车走行“8”字轨迹,是整个小车设计的关键。经过分析,发现利用间歇机构能够实现转向的功能,考虑到凸轮、槽轮等机构加工制造困难,精度较难保证,本文采用不完全齿轮和曲柄摇杆机构相结合的方式,来实现稳定快速的转向效果。
2.3.1 不完全齿轮机构
为了实现小车绕行饱满的“8”字轨迹,增加其绕障数目,轨迹的左右两段都为圆弧形,对此要求前轮在最大摆角处有一段时间的停歇效果[12],考虑到加工制造的限制以及精度要求,本文选取了结构简单、停歇比可靠的不完全齿轮机构[13],其设计制造容易、工作可靠、占用空间较小,比较适合绕行“8”字轨小车。
为了使小车的实际运行轨迹能够像设定的那样实现对称,在不完全齿轮的从动轮上连接了曲柄摇杆机构[14-15],通过齿轮的周期性啮合实现曲柄摇杆的往复运动。当齿轮啮合处于锁止弧接触段时,曲柄处于水平位置,此时摇杆的摆角处在极限位置,小车的前轮转角就相应地达到最大,此时实现绕行“8”字轨迹的圆弧部分,当齿轮处于啮合状态时,从动轮带动曲柄摇杆机构运动,实现前轮转角的变化,控制小车走行“8”字轨迹的非圆弧部分。考虑到空间曲柄摇杆机构稳定性较差,设计时让曲柄的回转中心与摇杆的摆动平面等高,这样就将空间运动转化为了平面运动,可提高换向的可靠性和平稳性。转向机构的设计如图4所示。

图4 转向机构设计
2.3.2 无急回特性的曲柄摇杆机构的设计计算
图5表示无急回特性的曲柄摇杆机构在摇杆处于两极限位置C1D与C2D时所对应的曲柄位置[16]。由图5可推导出:
C1C2=AC2-AC1=(a+b)-(b-a)=2a
(4)
可见,当摇杆处于两极限位置时所构成的等腰三角形C1DC2底边长只与曲柄长度有关(其中a、b、c、d依次对应图5中各杆:a=AB1=AB2=C1E=C2E,b=B1C1=B2C2,c=C1D,d=AD)。设摇杆摆角为θ,即∠C1DC2=θ,另C1C2的中点为E,则在直角三角形C1DE或C2DE中有:
(5)
当摆角θ的数值已知,曲柄a和摇杆c成确定的比例关系。
由图5中的几何关系可知,在RtΔC2DE中有:
cosα=a/c
(6)
又在ΔAC2D中,由余弦定理可得:
(7)
联立式(6)和(7)得:
(8)
化简后可得:
a2+d2=b2+c2
(9)
可见,曲柄摇杆机构无急回特性的充要条件为曲柄、机架平方和等于连杆、摇杆平方和。结合式(5)、(9)并通过UG9.0运动仿真,最后将曲柄摇杆机构的各个尺寸定为:a=22.5,b=48.7,c=40.2,d=59。
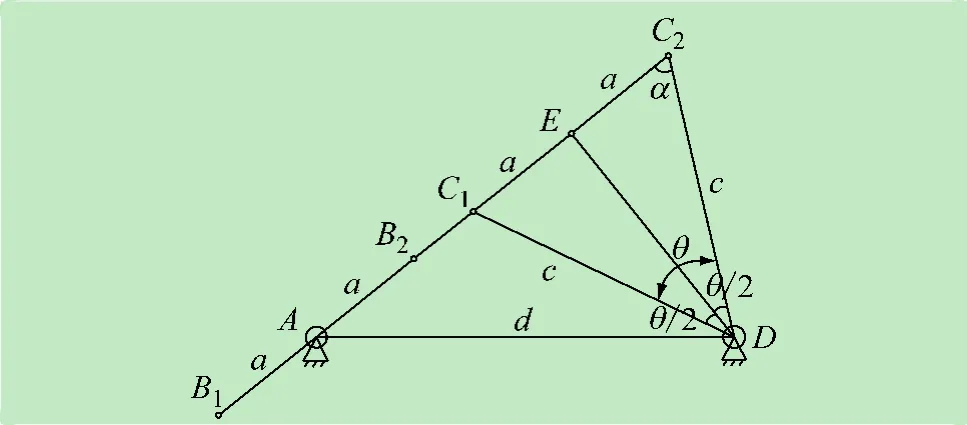
图5 无急回特性的曲柄摇杆机构分析图
小车的总体设计图如图6所示,考虑到加工制造和装配的误差,曲柄摇杆设置为可以微调的机构。在现场比赛过程中,可以通过不断调整连杆与摇杆的长度,使小车获得较为理想的“8”字轨迹。

图6 无碳小车装配图
3 结 语
根据山西省无碳小车竞赛的要求,设计了一种结构简单、运行可靠的绕行“8”字轨迹的无碳小车。根据设定好的“8”字轨迹,确定小车整体布局和一些关键尺寸,考虑到轨迹由圆弧段和非圆弧段组成,可以选用间歇机构来实现。本文利用不完全齿轮和曲柄摇杆机构相结合控制小车的周期性换向,实现小车绕行“8”字轨迹的功能。实践证明,该机构传动比准确,冲击振动较小,能够较好地实现小车平稳换向。
[1] 邹光明,杨秀光. 以势能驱动的涡卷弹簧储能小车研究[J]. 机械设计,2012,29(4): 32-35.
[2] 杨秀光,邹光明. 避障小车转向系统的设计[J]. 机械传动,2012,36(4): 41-43.
[3] 刘金肖,何秋熟,杨延清,等. 无碳小车创新性结构设计[J]. 电气与自动化,2014,43(5): 189-191.
[4] 胡越铭,高德文,张 瑞,等. 基于凸轮组合机构的“8”字形无碳小车创新设计[J].北方工业大学学报,2014,26(1): 38-43.
[5] 王建军,朱海龙,尹洪友. 无碳小车8字转向机构设计[J]. 机械制造,2014,52(6): 17-19.
[6] 张文海,刘春东,赵成刚,等. 基于大学生科技创新能力培养的一种无碳小车设计与制作[J]. 河北建筑工程学院学报,2014,32(3): 77-80.
[7] 陈晓东,石雁南,张莉莉.无碳小车的设计、制作与创新实践[J]. 实验室研究与探索,2013,32(12): 92-95.
[8] 曹 斌,张海波,朱华炳. 基于槽轮机构的8字轨迹无碳小车设计[J ]. 合肥工业大学学报(自然科学版),2014,37(6): 661-666.
[9] 吴新良,刘建春,郑朝阳. 重力驱动的避障小车设计与制造[J ]. 机械设计,2014,31(10): 25-28.
[10] 王 斌,王 衍,李润莲,等. “无碳小车”的创新性设计[J ]. 山西大同大学学报(自然科学版),2012,28(1): 59-62.
[11] 朱孝录. 齿轮传动设计手册[M]. 北京:化学工业出版社,2005.
[12] 邹慧君,殷鸿梁.间歇运动机构设计与应用创新[M].北京:机械工业出版社,2008.
[13] 赖雅琳,张金顺. 间歇机构—不完全齿轮机构设计及应用[J]. 机械工程师,2002(9):15-16.
[14] 李树军. 机械原理[M]. 沈阳:东北大学出版社,2002.
[15] 杨可桢,程光蕴,李仲生.机械设计基础[M]. 北京:高等教育出版社,2006.
[16] 元增民,马 璇. 曲柄摇杆机构无急回特性的条件及其应用[J]. 邢台职业技术学院学报,2000,17(3):49-53.
Design of Carbon-free Car Based on Incomplete Gear and Crank-rocker Mechanism
XUBing,YINJiang,CHENJun-jun
(Department of Automation, Shanxi University, Taiyuan 030013, China)
Based on the requirements of Shanxi College Students’ Comprehensive Ability Competition in Engineering Training, a car which converts gravitational potential energy into kinetic energy and automatically detours 8-track is designed. According to the competition requirements, the structure of the car is designed. First, we simulate the best 8-shaped track using Matlab software, and then use the track to determine the car’s wheel diameter and gear mechanism's transmission ratio. Furthermore, we design the car’s steering system through a combination of incomplete gear and crank rocker mechanism. The car detours 8-shaped track’s non-circular section and circular section when incomplete gear is in toothed portion and the non-toothed portion periodicity. Finally, UGNX software is used for three-dimensional modeling, assembling and motion simulation of the car constituted bodies. After achieving the desired effect from the simulation, the car is manufactured and debugged. The practice tests verify the rationality of the mechanism.
carbon-free car; 8-shaped track; incomplete gear mechanism; crank-rocker mechanism
2015-04-13
徐 冰(1988-),女,河北秦皇岛人,硕士,助教,现主要从事机械电子方向研究。
Tel.:15834161053;E-mail:xubing@sxu.edu.cn
TH 122
A
1006-7167(2016)02-0059-03
