一种新的圆环全域校相方法
2016-12-20徐自民丁志宏陈华中
徐自民,丁志宏,陈华中
(中国人民解放军63726部队,宁夏 银川 750004)
一种新的圆环全域校相方法
徐自民,丁志宏,陈华中
(中国人民解放军63726部队,宁夏 银川 750004)
阐述了多模馈源单脉冲跟踪雷达测角系统相位测量校正方法中校相值不确定度与测量子样数量的关系。给出了该类型测角系统任意象限位置空间偏角相位计算公式,并基于此公式提出一种新的圆环全域校相方法。通过对参考信标进行环绕一整周的多点测量,能够克服传统四点相位测量校正方法校相值不确定度大、置信率低、校相结果受零点对不准影响大和多径干扰误差严重的问题,同时给出了该方法的实际测试验证结果数据。
校相;圆环全域;跟踪;零点对不准;多径干扰
0 引言
由于单脉冲跟踪体制具有精度高、稳定性好及实现简单等优点[1],我国航天测量设备中普遍采用振幅和差式双通道单脉冲方案实现测角及自跟踪功能[2]。差信号与和信号分别经过较长的信道传输后,二者之间的相位关系往往受到温湿度、电路参数等因素影响[3],难以保持已调好的相位关系,出现相对相位延迟[4]。校相作为工程上解决交叉耦合的重要方法,对单脉冲跟踪系统的角精度有很大影响[2]。准确的相位校正参数是系统稳定跟踪和精确测量的前提,目前该相位校正参数通常采用四点测量方法获得,这种方法存在受零点对不准影响大、多径干扰误差严重的问题,方法中测量子样只有四点,根据有限样本测量随机误差分布概率密度规律,这种小子样空间测量存在校相结果不确定度大、置信率低的问题[5-6],提高相互独立的测量子样数量是解决该问题的有效方法[7]。
1 问题分析
1.1 四点相位测量校正方法
该方法的基本原理是对和差通道信号的固有相位进行补偿,使之保持相位一致[8],补偿相位值的测量校正是校相的主要工作。在角跟踪过程中补偿相位值被用于电轴偏离相位解调计算的基准,经补偿后解调计算出的电轴偏离相位表征了电轴偏离跟踪目标的空间位置方向[9]。在上述补偿相位测量校正过程中天线电轴偏开信标机的角度位置包括方位正负方向和俯仰正负方向共四点,故在本文中称之为四点相位测量校正方法。
1.2 四点相位测量校正方法的缺点
校相过程中误差电压与电轴偏离分量及校相角度关系如下[10]:
VA=kAGdelt(Aecos(θin)-Eesin(θin)),
(1)
VE=kEGdelt(Aesin(θin)+Eesin(θin)),
(2)
式中,VA、VE分别为角度解调系统解出的方位角误差电压和俯仰角误差电压,kA、kE分别为系统预置的方位角误差和俯仰角误差电压归一化灵敏度系数,Gdelt为系统差信道信号相对和信道信号的相对增益,Ae、Ee分别为方位方向电轴偏离分量和俯仰方向电轴偏离分量,θin为系统固有相位差,即待测校相补偿相位值。

(3)
(4)
(5)
(6)
在实际校相中,尤其是窄波束高精度测角雷达系统,其零点对准不可能做到只有方位或只有俯仰单一方向的电轴偏移,即Ae和Ee二者之一必须为零的条件达不到,此时,θin如式(7)所示:
(7)
可见,零点对不准带入了测量误差,造成较大的交叉耦合,在单脉冲系统中,交叉耦合是影响系统角跟踪性能的一个重要因素[11]。
需要说明的是由式(7)可见,θin与Ae、Ee不是线性函数关系,所以也不能够通过电轴正负向偏移量抵消零点对不准带来的误差。
此外,当标校环境恶劣复杂时又会有多径干扰信号进入天线馈源[12],这种情况发生时主瓣方向的信号与多径引入的信号在天线馈源处进行了功率和相位的合成,合成的效果相当于信标机的空间位置产生了变化,这种变化也导致Ae和Ee二者之一必须为零的条件达不到,同时,能量分布也不再旋转对称,这种情况进一步使四点测量的平均结果出现偏差。这样,因多径带入了测量误差[13]。
系统校相值θin_optima由式(3)、式(4)、式(5)和式(6)四个结果的算术平均值获得[14],如式(8)所示:
(8)
式中,n为测量样本数,θin_i为第i次测量获得的系统固有相位差。
其测量样本数为n为4。表1给出了有限样本数量测量随机误差分布概率密度所服从的t函数与理论无限样本数量测量服从的正态分布函数置信区间扩大因子表。其中,对于有限样本测量,ε为有限样本的标准偏差;对于理论无限样本测量,ε为无限样本的总统标准偏差。根据表1可见,由于四点法测量本数量较少,会导致测量结果置信区间扩大,不确定度大,或者置信率下降。
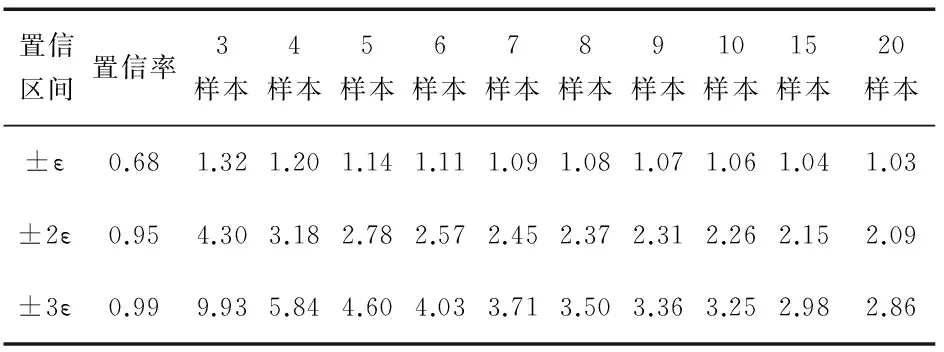
表1 置信区间扩大因子表
如果重复进行四点法测量,由于每次测量的电轴偏差位置相同,其样本相关性强及不具有独立性,并不能通过这种方法提高有效样本数量以降低测量结果的不确定性。
2 圆环全域校相方法
2.1 四点相位测量校正方法的问题原因
由前面分析可知,传统四点相位测量校正方法存在校相结果受零点对不准影响大、多径干扰误差严重、校相值不确定度大、置信率低的问题。其中受零点对不准影响大、多径干扰误差严重的原因在于式(7)中同时含有A0和E0,而在实际标校中Ae和Ee二者之一必须为零的条件难以达到,导致式(3)、式(4)、式(5)和式(6)的误差较大,进而影响校相的准确性。校相值不确定度大、置信率低的问题原因在于测量样本数量太少,并且重复测量也不能解决样本独立性问题。
2.2 圆环全域校相方法的提出
由2.1节可见,解决问题的有效途径在于:① 使θin的计算不依赖Ae和Ee二者之一必须为零的条件;② 加大独立性测量样本数量。
式(1)和式(2)联立后可得:
(9)
3 圆环全域校相方法实测结果
表2是一个跟踪雷达在波束内,人为偏离跟踪零点后进行传统四点相位测量校正和本文提出的圆环全域校相方法所得校相结果的对比。
表2中θ1/2指半波束宽度,“对零”是相对的说法,真正的对零是不能做到的,这里是相对于0.2θ1/2来说,通过系统自跟踪找到的零点已经可以忽略误差。

表2 偏离零点校相比较表
由对比结果看,传统四点相位测量校正方法受零点不准影响严重,而圆环全域校相方法所得校相结果受零点不准影响可以忽略。
4 结束语
相比传统四点相位测量校正方法,本文提出的圆环全域校相方法具有以下优点:通过天线指向位置子样序列集相关运算求解校相相位的方法克服传统四点相位测量校正方法校相结果受零点对不准影响大、多径干扰误差严重的问题;通过圆环全域校相方法加大了校相测量独立性样本数量,显著改善了校相值不确定度大、置信率低的问题。
[1] 赵呈哲,刘国栋,孙志刚.单脉冲跟踪接收机系统误差数字补偿技术[J].无线电工程,2013,43(8):26-28.
[2] 宋晓瑞,王元钦,郑海昕,等.一种基于正交处理的角跟踪系统数字校相方法[J].电子测量技术,2015,38(10):41-42.
[3] 张书仙,李 瑭,潘点飞.基于数字波束形成的多目标测控[J].国外电子测量技术,2014,33(8):73-77.
[4] 张振庄,耿大孝.船载天线动态校相技术研究与实现[J].无线电通信技术,2015,41(1):52-55.
[5] 陈 魁.试验设计与分析(第2版)[M].北京:清华大学出版社,2005.
[6] 程跃秋.统计学原理[M].北京:经济科学出版社,2003.
[7] 区靖祥.试验统计学(第2版)[M].广州:广东教育出版社,2010.
[8] 仇三山.双通道单脉冲跟踪快速校相改进算法[J].四川兵工学报,2013,34(5):96-98.
[9] 魏明山,葛铁志,杜 潇,等.大口径天线多模馈源跟踪系统校相参数的计算[J].电讯技术,2015,55(7):741-745.
[10]李 珂.一种双通道角跟踪的快速校相方法[J].电讯技术,2007,47(6):99-101.
[11]江建军,黄云雪,孙 彪,等.基于随机解调器的宽带雷达信号探测[J].仪器仪表学报,2014,35(3):709-713.
[12]苏 勋,席文君.双通道跟踪接收机对地校相技术[J].电讯技术,2012,5(23):268-271.
[13]范涌高.典型车载雷达的电磁兼容性研究[D].西安:西安电子科技大学,2014.
[14]高 山,刘桂生,李天宝,等.Ka频段设备自动校相模型优化[J].无线电工程,2014,44(10):77-80.
[15]茆诗松,吕晓玲.数理统计学[M].北京:中国人民大学出版社,2011.
A Circle Full-field Phase Calibration Method
XU Zi-min,DING Zhi-hong,CHEN Hua-zhong
(Unit 63726,PLA,Yinchuan Ningxia 750004,China)
The relationship between the uncertainty in corrected phase result and the number of measuring samples in the phase measuring and calibrating method for the multi-mode feed and monopulse tracking radar angular measuring system is described in detail.The calculation formula of spatial deflection angle in arbitrary quadrant position in this system is provided,and a new circle full-field method of phase calibration is proposed based on this formula.By multipoint measurement encircling the reference radio beacon,this method can solve the problem in traditional four-point phase measuring and calibrating method that the uncertainty of result is large,the confidence ratio is small,corrected phase result is seriously affected by the radio beacon misalignment and multipath interference error is large,and the actual test results of this method are given as well.
phase calibration; circle full-field; tracking; radio beacon misalignment; multipath interference
10.3969/j.issn.1003-3114.2016.06.20
徐自民,丁志宏,陈华中.一种新的圆环全域校相方法[J].无线电通信技术,2016,42(6):77-80.
2016-07-15
TN953+.5
A
1003-3114(2016)06-77-4
徐自民(1974—),男,高级工程师,主要研究方向:航天测控,遥测、外测地面设备。丁志宏(1972—),男,总工程师,主要研究方向:航天测控、测控前沿技术、测控系统工程。陈华中(1979—),男,副总工程师,主要研究方向:航天测控、测控通信与软件技术。
