一种基于RFID的定位方法
2016-12-20袁晓峰
袁晓峰,陈 颀
(昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
一种基于RFID的定位方法
袁晓峰,陈 颀
(昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
针对现有的RFID定位方法只适合室内小范围定位,大范围定位成本非常高,无较大可行性,且技术过于复杂的问题,提出了一种新RFID定位方法,即使用一个阅读器天线布置在定位区域的中心位置,然后按一定角速度转动。根据读回的接收信号强度(Received Signal Strength Indicator,RSSI)与转动的角度之间的数据,使用小波阈值去噪处理,再使用最大值法求得角度;最后根据RSSI与距离的关系求得距离,从而实现定位。由于实验条件所限,所以先采用对数路径损耗模型建立起研究对象的模型,依据该模型进行仿真实验,结果表明,该方法可以满足室内、室外大范围的,精度要求不是很高的定位需求。
RFID;小波去噪;RSSI;定位;对数距离路径损耗模型
0 引言
随着无线技术深入发展,实时定位(RTLS)自然而然的就被提了出来。RFID(Radio Frequeney Identifieation)具有非接触性、抗干扰性强、定位快、识别距离远及非视距定位等特性,从而成为RTLS的主要研究方向之一[1]。
目前比较典型的RFID实时定位系统,主要有3D-ID[2]、SpotON[3]及 LANDMARC[4]。其中,LANDMARC系统最为典型,可行性最高。LANDMARC系统引入了参考标签的概念,是将RFID技术应用到室内定位当中并搭建起完整系统、取得较好定位精度的首次尝试。通过使用参考标签代替一部分RFID读写器,使RFID成为一种有成本效益的定位技术[5]。但是其定位范围过小,如果在室外进行大范围的定位依旧要使用大量的RFID读写器,整套定位系统的组建成本就会相当高,失去可行性。
针对这种情况,提出一种新的RFID定位方法,具体来说是使用有源RFID系统,使一个RFID阅读器的天线在定位区域中心从一个基准位置按一定角速度旋转,然后读取各个待定位标签的RSSI值,根据RSSI值的大小变化的曲线得出标签和阅读器的距离以及相对基准位置的角度,从而实现定位。
1 改进的对数路径损耗模型
对于RFID定位,主要就是利用阅读器读回的待定位标签的RSSI值,然后根据RSSI值与距离的关系得到距离值,或者用一些算法处理得到有用的信息,然后再运用一些定位算法得到方位。
由于环境中各种因素的影响,RSSI值与距离的关系并不是一一对应的函数关系,这也是RFID定位难的主要问题之一。
1.1 对数路径距离损耗模型
对数路径损耗模型是一种比较常见的模型,它能够较好地表示RSSI值与距离之间的关系,公式如下:
式中,Pt为信号的发射功率,PL(d)为标签或RFID信号传输距离d时的损耗,Pr(d)为RFID信号传输距离d时的信号的功率强度,Xσ为噪声,d0为参考点,n为路径损耗指数,Xσ又被称为阴影衰落[6]。
1.2 改进的对数路径损耗模型
本文定位方法采用的是有源标签发射定位信号,阅读器读取信号,并对接收到的信号进行相应处理,从而实现对标签的定位操作。鉴于如今市面上识读100m左右的RFID系统已经非常多,成本也不高,本文提出了采用有源RFID系统进行定位的方法,标签的发射功率一般为0dbm,定位范围为直径100m的圆形区域,利用对数路径损耗模型,于是有:
(1)
又由Friis公式可知:
式中,PT为RFID信号发射功率,GT为发射RFID信号的天线的增益,GR为接收RFID信号的天线的增益,c为光速,f为RFID信号的频率[7]。再根据雷达原理可知RFID阅读器天线方向图可以用如下辛克函数来近似[8]:
式中,θ0为天线的零功率波束宽度。于是有(dBm表示取分贝):
(2)
根据参考文献[8]即《基于对数距离路径损耗模型下的路径损耗指数研究》中的数据可知,在d=0.5 m,PT=12 dBm,f=935.4 MHz时,有n=2.699 6,Xσ~(0,26.799 33)[9]。
显然,无论PT值为多少,在环境不变的情况下,只要d=0.5 m,f=935.4 MHz,那么依旧有n=2.699 6,Xσ~(0,26.799 33)。一般来说远距离有源RFID系统,PT=0 dbm,GT=0 dbm,GR=12 dbi,f一般在935 MHz频段或2.4 GHz频段内。文中,假设使用935.4 MHz(一方面,935.4 MHz相对于来说更成熟,组建成本低;另一方面,2.4 GHz的产品性能更好,如果935.4 MHz可行,那么2.4 GHz肯定是可行的,因此本文选取935.4 MHz进行考察)。θ0对于远距离RFID来说一般为60°~90°,本文取中间值75°。

由于Xσ~(0,26.799 33),所以:
当d=80m时,有:
若最大值在0°处,则上式的RSSI值从-180°~180°的分布大致如图1所示(一般来说有源RFID系统的阅读器接受灵敏度一般在-90dBm左右,所以,对于所有小于-90dBm的RSSI值统一设为-90dBm)。
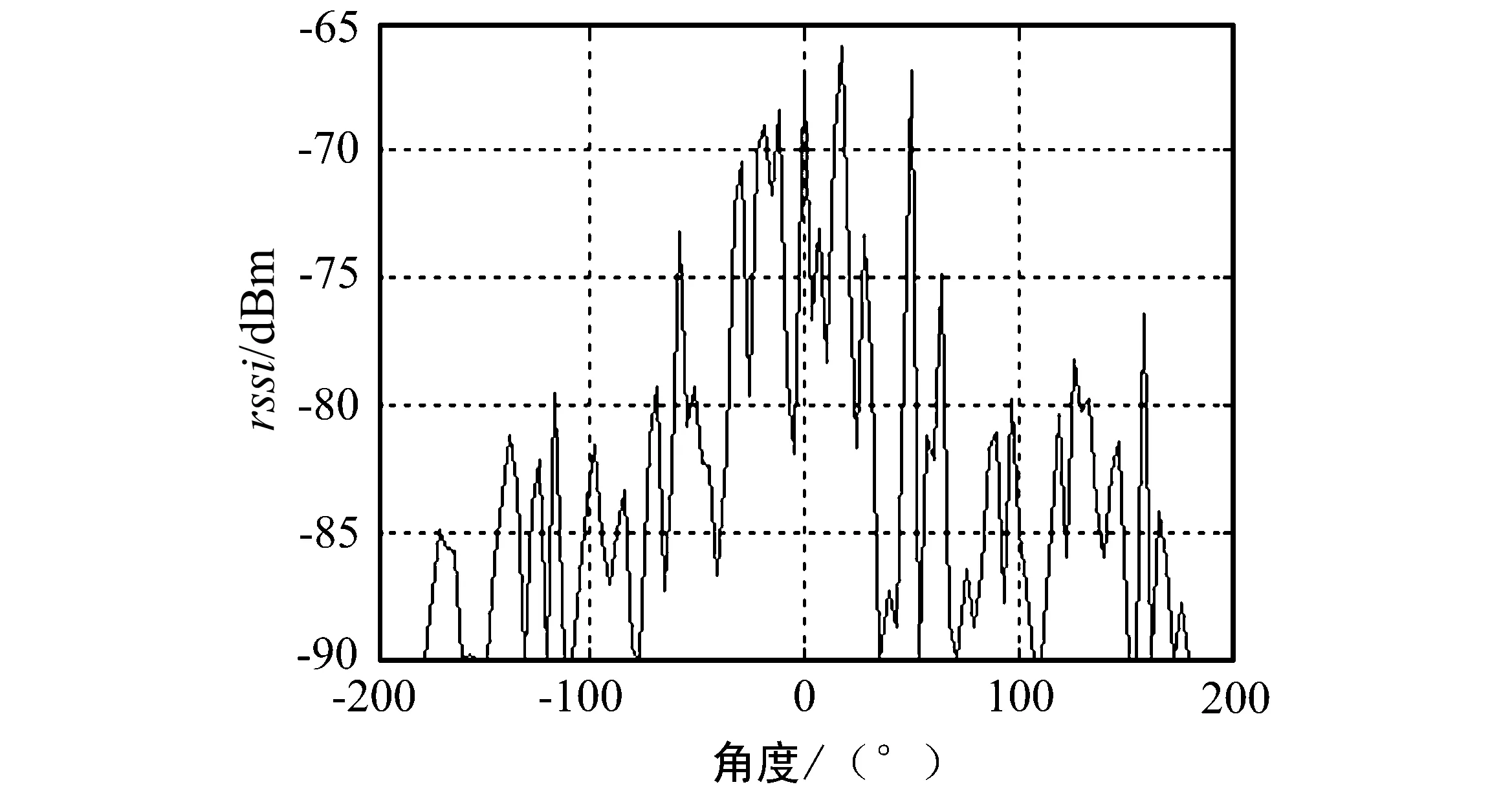
图1 最大值在0°时的RSSI值分布图
本文以RFID天线主轴收到的RSSI值与d的关系来求距离。当天线主轴对准标签时,θ=0°,所以有如下RSSI与d的关系式:
PrdBm(d)=-13.841-26.996lg(2d)+Xσ,Xσ~(0,26.799 33)。
RSSI与d的关系如图2所示。
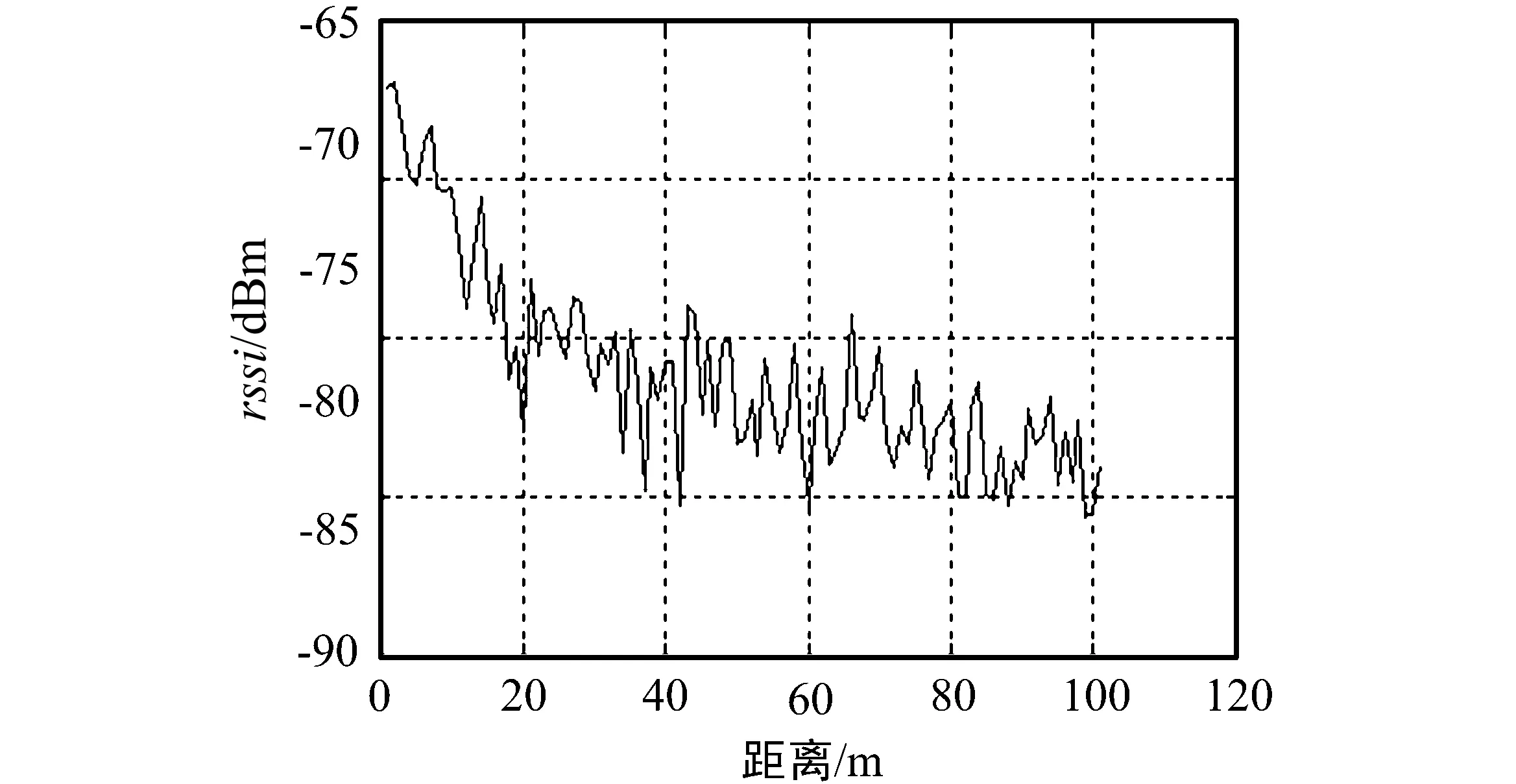
图2 RSSI值与距离d的关系
2 利用最大值法求标签方位
2.1 最大值法求角度
因为在RFID标签和阅读器正好相对时,阅读器收到的RSSI值应该是最大的,即:若f(θ)为阅读器旋转一周后读到的某RFID标签的RSSI值函数,且f(θ0)=max(f(θ)),则θ0即为所求的角度。
本文使用matlab对最大值法进行100次试验仿真,观察效果如图3所示。
虽然最大值法可以用来求得角度,但是效果并不好,大部分的结果都明显偏离实际的角度,个别仿真结果的误差达到了50°,甚至超过100°,接近150°,这样的精度用来定位是不行的,明显满足不了实际的应用。于是,采用一种改进的最大值法来定位——先使用小波去噪的方法对采集的RSSI数据做去噪声处理,然后再使用最大值法来求得角度。

图3 100次最大值法求角度的误差
2.2 最大值法求距离
本文先进行100次蒙特卡罗实验得到了d=50 m时,RSSI的平均值为-67.335 0 dbm。然后以这个RSSI值为标准,再进行100次仿真,得到距离误差如上图4所示。可以发现用该方法求得的距离误差很大,显然这个测距精度是无法满足要求的,所以本文采用一种改进的测距方法。改进的测距方法如下:
① 进行1次蒙特卡罗实验,得倒RSSI与距离的具体关系。然后进行小波去噪得到去除噪声后的RSSI与距离的关系式;
② 重复①足够次数,然后求得每个距离对应的RSSI的各次蒙特卡罗试验的值的平均值;
③ 使用②中得倒的RSSI平均值与距离的关系式,进行仿真实验,看效果如何。
注:在仿真实验中求距离前,也要先使用小波去噪处理仿真得到的RSSI值。
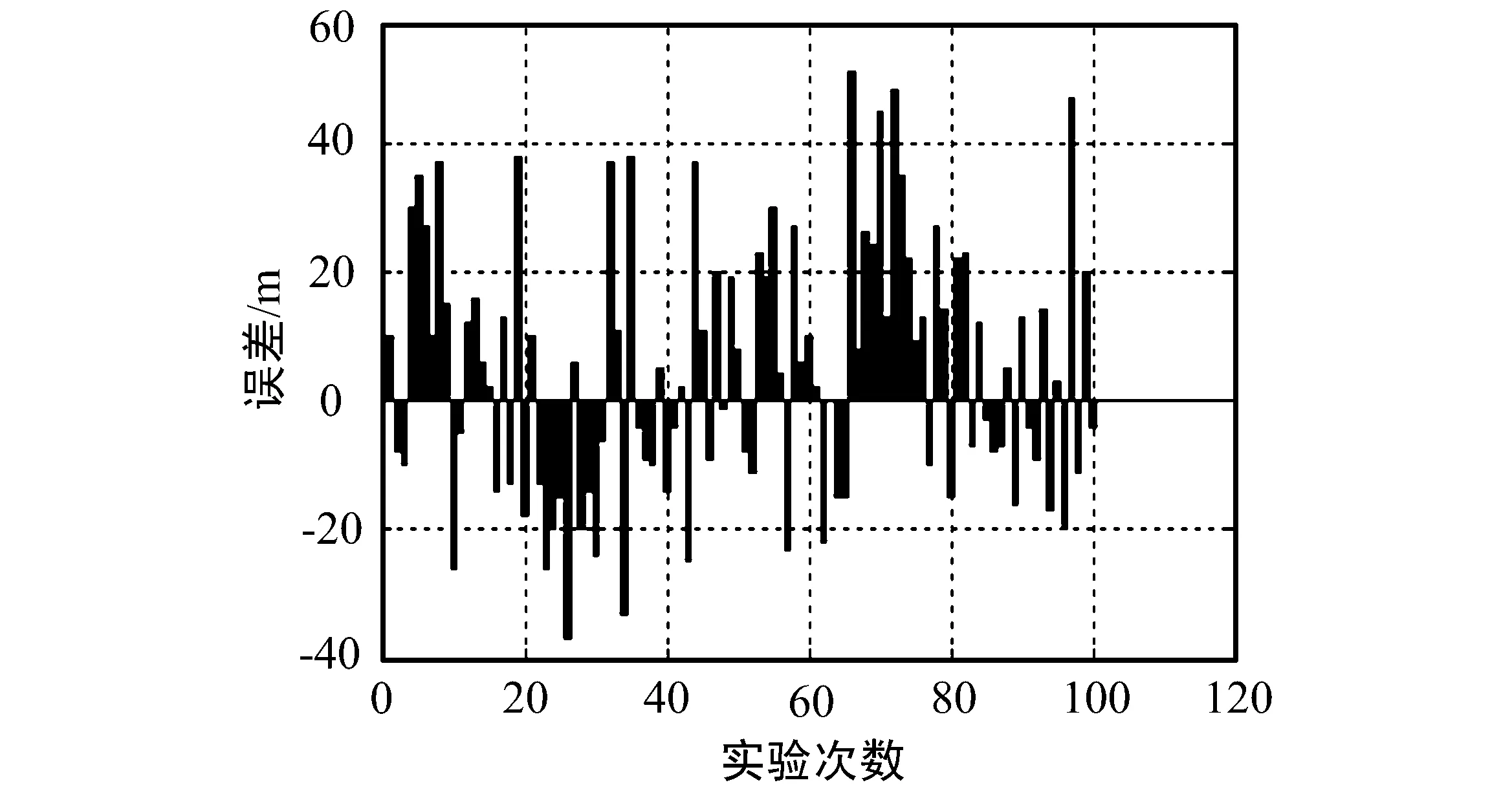
图4 最大值法求距离的误差
3 改进的最大值法求标签方位
3.1 小波去噪
小波阈值去噪的过程如图5所示,小波分解时要确定小波基以及分解层数,在阈值处理时要确定阈值λ的选取规则,以及使用何种阈值函数。

图5 小波阈值去噪流程图
① 小波基的选择:一般来说dBN,symN小波是去噪中使用较多的小波基,去噪效果较为理想,在大量的仿真实验的基础上发现,sym5小波对于本文中的定位方法效果较好。
② 分解层数的选择:在分解层数为2时,去噪信号最接近原信号;但是,在分解层数为4时,去噪信号虽然与原信号出现了较大的失真,但是天线信号副瓣得到了非常好的抑制,有利于定位,所以本文使用4层小波分解。
③ 阈值函数:较常见的有软阈值函数和硬阈值函数2种,以及在此基础上的一些变形阈值函数。一般来说,软阈值法获得的重构信号具有更好的光滑性,但是误差相对较大。硬阈值方法获得的重构信号具有更好的逼近性,但是有附加震荡。但是,本文使用的是最大值法求角度与距离,所以,对震荡非常敏感,故使用软阈值函数。

3.2 仿真结果
先使用小波去噪,再用最大值法求角度与距离,对求角度的100次蒙特卡罗实验进行分析。图6为进行4层分解的小波去噪的仿真图,图7为改进最大值法求角度的误差仿真图(正数表示求得的角度大于实际的角度,负数表示求得的角度小于实际的角度)。

图6 分解层数为4时的小波去噪仿真图

图7 改进最大值法求角度的误差仿真图
可以看到使用小波阈值去噪后,求得的角度精度基本可以保持在4°以内,基本可以满足定位精度要求不是很高的定位要求。
由图8可以看到,经小波去噪后,RSSI与距离的关系有了较好的一一对应关系,从而可以较为准确的根据RSSI值求得距离。图9也说明了这一点(正数表示求得的角度大于实际的角度,负数表示求得的角度小于实际的角度),可以看到,求得的距离误差基本都在5 m之内,最大的误差也不超过10 m,这样对于精度要求不高的定位,是完全可以满足的。

图8 经小波去噪后RSSI与距离的关系图 图9 改进的最大值法求距离的误差仿真图
4 结束语
本文先利用路径对数损耗模型和Friis公式建立阅读器接收到的功率与标签相对于阅读器的距离以及角度的关系式,然后再使用小波去噪进行相关处理,最后利用最大值法得到角度以及距离,从而实现标签的定位。本文提出的RFID定位方法在天线的识读范围内(上述实验以100 m为例),只需要一个阅读器即可,而LANDMARC及其大部分变形,在这个范围内至少需要4个阅读器加上数千个标签,所以本方案大大降低了室外或室内大范围定位的成本。同时,由仿真结果可以看到本方案提出的定位方法也达到了一定的精度要求,对于精度要求不高的定位,如人员定位是完全可以满足的。另外,如何使本文提出的定位方法不再局限于模型,而是运用到实际的信道环境中,是本文下一步的研究目标。
[1] 熊廷文.基于无源超高频射频识别技术的实时定位系统的研究[D].上海:复旦大学,2010.
[2] Werb J,Lanzl C.Designing a Positioning System for Finding Things and People Indoors[J].IEEE Spectrum,1998,35(9):71 -78.
[3] Hightower J,Want R,Borrlello G.SpotON:An Indoor 3D Location Sensing Technology Based on RF Signal Strength[M].Seattle,USA:Department of Computer Science and Engineering,University of Washington,2000.
[4] Ni L,Liu Y,Lau Y,et al.LANDMARC:Indoor Location Sensing Using Active RFID[C]∥Proceeding of the 1st International Conference on Pervasive Computing,Texas,USA,2003:407-415.
[5] 史伟光.基于射频识别技术的室内定位算法研究[D].天津:天津大学,2012.
[6] 张健翀.基于射频识别(RFID)技术室内定位系统的研究[D].广州:中山大学,2010.
[7] Rappaport T.Wireless Communications,Principle&Practice[M].USA:IEEE Press,Prentice Hall,1996.
[8] 丁鹭飞,耿富录.雷达原理[M].西安:西安电子科技大学出版社,2002.
[9] 崔燕妮,张兴辉,杨荣飞,等.基于对数距离路径损耗模型下的路径损耗指数研究[C]∥ 2010’全国第十三届微波集成电路与移动通信学术会议论文集.浙江:中国电子学会,浙江省电子学会,2010:267-271.
[10]李庆华.基于小波阈值算法的信号去噪研究[D].乌鲁木齐:新疆大学,2013.
An RFID-based Positioning Method
YUAN Xiao-feng,CHEN Qi
(Faculty of Information Engineering and Automation,Kunming University of Science and Technology,Kunming Yunnan 650500,China)
Now,existing RFID positioning method is only suitable for small-scale indoor positioning and the method is inconvenient.A new positioning method is proposed in this paper.At first,a reader’s antenna is arranged in the central location of the positioning region.Second,the antenna rotates by a certain angular velocity to get the signal of RSSI.Third,wavelet threshold is used to denoise the signal.At last,the maximum value method is used to calculate the angle and distance according to the signal after denoising.Due to the limited experimental conditions,the paper uses logarithmic path loss model to establish the research model based on which simulation is done.Result shows that this way can be used in indoor and outdoor large-scale positioning when very high accuracy is not required.
RFID;wavelet denoising;RSSI;location;logarithmic path loss model
10.3969/j.issn.1003-3114.2016.06.21
袁晓峰,陈 颀.一种基于RFID的定位方法[J].无线电通信技术,2016,42(6):81-85.
2016-07-25
袁晓峰(1990—),男,硕士研究生,主要研究方向:数字信号处理、嵌入式应用。陈 颀(1964—),男,硕士,副教授,主要研究方向:微波冶金控制、嵌入式应用。
TN98
A
1003-3114(2016)06-81-5
