齿形结构的长脉冲敏感型微加速度开关
2016-12-19聂伟荣周织建
步 超,聂伟荣,罗 乔,周织建
(南京理工大学 机械工程学院,江苏 南京 210094)
齿形结构的长脉冲敏感型微加速度开关
步 超,聂伟荣*,罗 乔,周织建
(南京理工大学 机械工程学院,江苏 南京 210094)
针对智能武器电源管理系统对开关闭锁和断开的要求,提出了一种长脉冲敏感型微加速度开关。该开关带有齿形结构的悬空质量块和齿形导杆,通过质量块和导杆在运动过程中相互碰撞实现能量耗散,从而具有在高幅值窄脉冲加速度作用下保持断开,在低幅值长脉冲加速度作用下可靠闭锁的功能。介绍了开关结构和工作原理,对开关进行了理论分析和有限元分析,并对开关模型进行了简化。采用UV-LIGA技术制作了开关样机,利用样机试验和有限元分析相结合的方法验证了开关的功能。有限元仿真结果表明,该开关在3 000g/3 ms半正弦加速度作用下可靠闭锁。旋转台离心试验显示,开关的静态闭锁阈值为2 385.3g~2 475.6g。落锤冲击试验和有限元仿真结果均表明,开关在15 000g/0.3 ms半正弦加速度作用下没有闭锁。得到的结果表明该开关满足设计要求,能够应用于对加速度脉宽有区分要求的场合。
微机电系统;加速度开关;长脉冲敏感型开关;动态响应;齿形结构
1 引 言
微机电系统(Micro Electro-mechanical System, MEMS)因具有尺寸小、易集成和大批量生产等优点而得到迅速发展。微加速度开关是一种集传感器和执行器功能于一体的MEMS器件[1-10],当加速度满足设计阈值时,开关电极接触形成电气通路,实现了加速度敏感和响应驱动一体化。目前,开关对加速度的敏感方式呈现多样化。如Xi Z和Cao Y等[1-2]通过引入多电极实现了开关的万向敏感。Currano L J等[3]通过在单个芯片上制作多个具有不同阈值的敏感单元实现了开关的多阈值敏感。Kim H[4]和Ma C W[5]等分别利用梳齿驱动执行结构和MEMS模拟数字转换器实现了阈值可调。而根据执行完响应动作后是否恢复到初始位置,开关可分为触发型和闭锁型等。黄新龙等[6]利用UV-LIGA技术制作了一种螺旋状触发型开关。Chen W G和Wang Y等[7-8]分别通过柔性电极结构和碳纳米管/铜柔性材料延长了触发型开关的接触时间。Currano L J等[9]提出一种闭锁型开关,并用有限元仿真和高速摄影试验相结合的方法研究了开关的闭锁性能。Guo Z Y等[10]通过分离质量块和活动电极,改进了闭锁开关的稳定性,并采用半圆形结构的电极提高了开关加工容差性。
但上述开关的阈值设计只针对加速度幅值,开关并不能识别加速度幅值和脉宽均不同的冲击载荷。但某些应用场合要求开关具有在高幅值窄脉冲干扰载荷下保持断开,只在低幅值长脉冲预设工作载荷下响应闭锁的能力。本文针对智能武器电源管理系统对开关在3 000g/3 ms半正弦加速度(定义为加速度A)作用下可靠闭锁,在15 000g/0.3 ms半正弦加速度(定义为加速度B)作用下保持断开的设计要求,基于齿形结构,设计了一种长脉冲敏感型微加速度开关。对开关进行了理论分析和有限元分析,并对开关模型进行简化。最后,利用样机试验并结合有限元分析验证了开关的长脉冲加速度敏感闭锁特性。
2 结构原理
微开关的整体结构如图1所示,为了提高闭锁稳定能力,开关采用双模块设计,分为通电模块M1和动态响应模块M2。M1主要包括闭锁机构和接电电极。闭锁机构由锁头、弧形触头和锁钩等组成。当开关受到的加速度达到阈值时,锁头与弧形触头接触,与外部电源和负载组成电气通路。M2主要包括带齿形结构的质量块、齿形导杆以及4根平面支撑弹簧等。4根弹簧分别连接于质量块的4个顶端,这种布局使得开关具有较高的单轴敏感性。质量块在运动时齿形结构会和运动导杆相互碰撞。

图1 微开关结构示意图
微开关的工作原理如图2所示,M1和M2为串联分布的弹簧质量阻尼系统。M1的主要用来实现可靠闭锁与通电,M2的主要功能是敏感加速度,产生位移响应。x1(t)为M1中锁头的运动位移,x2(t)为M2中质量块的运动位移。M1中锁头和弧形触头存在间距d,M2的质量块和M1的锁头之间存在间距l。当开关在敏感方向承受的加速度小于阈值时,运动位移x2(t)

图2 微开关物理模型
3 动态响应分析
3.1 理论分析
当开关无齿形碰撞结构时,开关动态响应模块的运动方程与传统加速度开关相同,可以表示为:

(1)
其中:x为质量块相对于基底的位移,m为质量块质量;c为阻尼系数,对于平行驱动的MEMS器件,主要取决于滑膜阻尼大小;k为弹簧刚度;a(t) 为施加于敏感方向的加速度,则式(1)可以改写为:

(2)
(3)
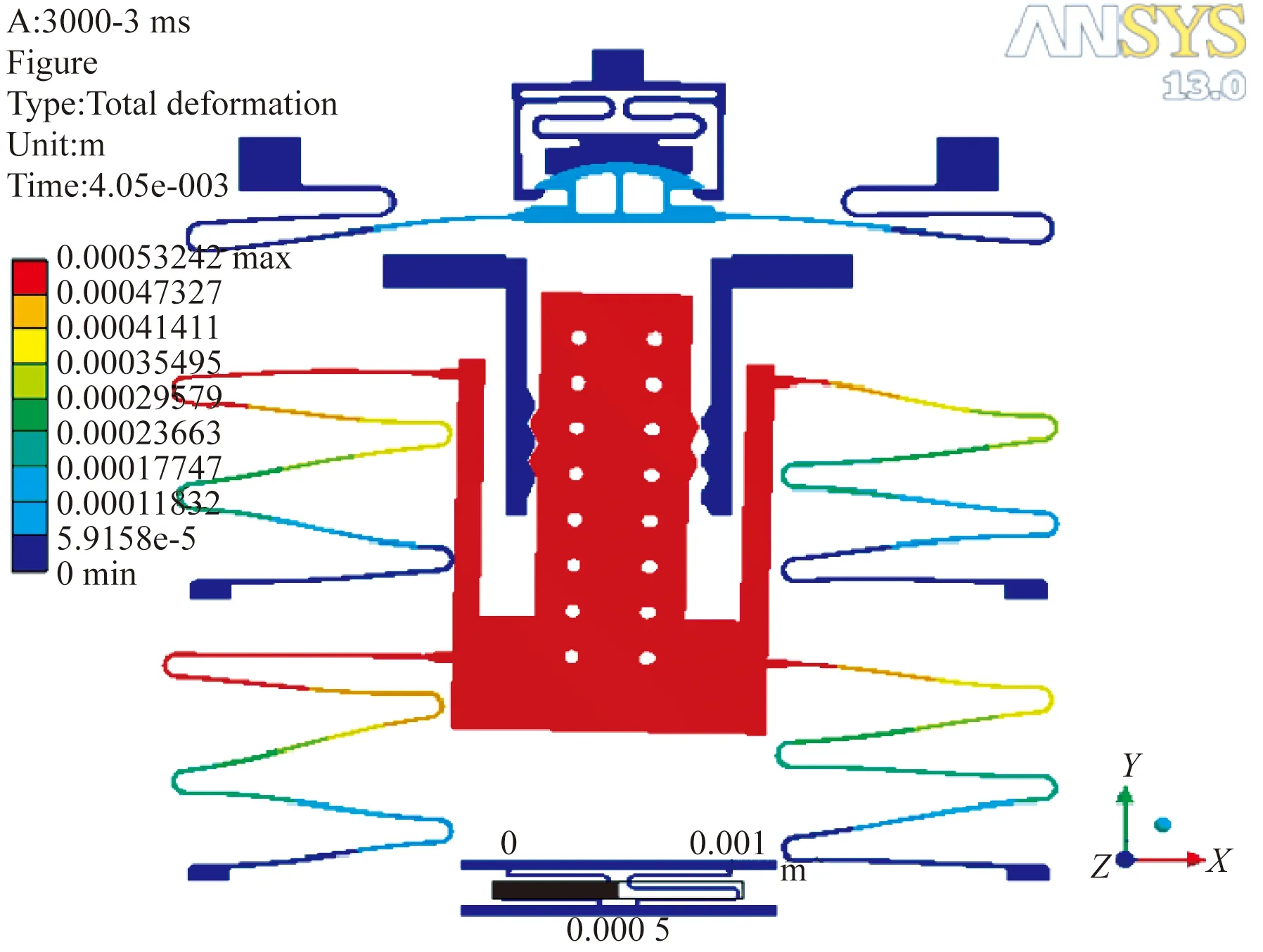
其中:A0为输入加速度幅值,τ为加速度脉宽,β=π/ωτ=T/2τ,T=2π/ωn。由式(3)求得具有不同固有频率的开关在加速度A和加速度B激励下的位移响应xA和xB如图3所示。开关在低幅值长脉冲加速度作用下的响应均小于对应的高幅值窄脉冲加速度作用下的响应,开关不能满足设计要求。另外,考虑到开关在加速度B激励下应满足x2(t) (a)位移响应A (b)位移响应B 图4 阻尼比和固有频率对长脉冲敏感性的影响 Fig.4 Impact of damping ratio and natural frequency on long pulse sensitivity 结合图3和图4可以得出,固有频率越大位移响应越小,长脉冲敏感能力越弱。阻尼比越大长脉冲敏感能力越强。要达到设计目标,就要降低位移响应同时提高长脉冲敏感性。因此,需要合理控制开关固有频率,同时提高阻尼比。 传统微开关依靠滑膜、压膜阻尼无法实现设计所需的高阻尼,因此提出在开关质量块上设计齿形结构和齿形导杆,依靠质量块运动时齿形结构的碰撞实现能量耗散。如图5(a)所示,当质量块在加速度激励下开始运动时,质量块和导杆上齿形角为α,相对间距为H的齿形结构发生斜碰。斜碰使得质量块运动方向改为向右运动(图5b),接着与右导杆发生斜碰方向改为向左运动(图5c)。重复此过程直到质量块通过所有的齿形结构,在导杆的修正下再次沿敏感方向运动(图5d)。 图5 微开关碰撞过程 3.2 有限元分析 有限元仿真分析方法是处理MEMS动力学问题,尤其是碰撞问题[12]的有效方法。使用ANSYS软件建立开关模型,其主要结构参数如表1所示。考虑到高韧性和导电性要求,MEMS开关利用微电铸工艺用镍材料制作,镍材料的杨氏模量为180 Gpa,泊松比为0.312[13]。首先进行模态分析,开关一阶振型平行于敏感方向,固有频率为95 9.73 Hz;二阶振型垂直于敏感方向,固有频率为1 583.1 Hz。高阶振型具有更高的固有频率。一阶固有频率和高阶固有频率相差较大,使得开关具有很高的单轴敏感性。然后进行瞬态动力学分析,分别对开关施加加速度A和加速度B,其响应结果如图6所示。开关在加速度A作用下实现了可靠闭锁,在加速度B作用下未能实现闭锁,加速度消失后质量块将回落到平衡位置。 (a)微开关处于闭锁状态 (b)开关处于断开状态 构件几何参数值齿形结构齿形角/(°)120相对间隙/μm20弹簧线宽/μm20厚度/μm80半径/μm50长度/μm500间隙M1与M2的间距/μm700锁头和弧形触头的间距/μm90 3.3 简化模型 利用有限元软件分析时,对于不同的输入激励需要逐个仿真求解,耗费资源。为了便于工程分析,利用仿真获得的响应特性推出一种等效的简化模型,以方便开关响应的工程分析。 对动态响应模块施加阶跃加速度,其响应结果如图7所示,阶跃响应曲线经过平滑处理,平滑后的响应曲线稳定在0.5 mm左右且无超调。虽然单次碰撞过程是非线性的,但从整个运动过程来看,平滑后的曲线类似于线性过阻尼二阶系统的阶跃响应。系统的上升时间tr≈3 ms。对于线性过阻尼二阶系统,系统阻尼比与上升时间tr的关系为: (4) 将一阶固有频率带入式(4),算得系统的等效线性阻尼比ξ=4.75。此时可将式(2)这一线性二阶系统视为齿形结构开关的线性简化模型,通过求解式(2)来近似描述开关的响应。 图7 动态响应模块的阶跃响应 图8所示为有限元仿真和简化模型求解位移响应的结果。位移响应A大于位移响应B且大于相对齿间距l,开关能够对加速度A敏感闭锁。在曲线上升段,模型求解结果能够与有限元仿真较好的吻合。最大位移响应A和最大位移响应B的相对计算误差分别为8.2%和6.5%。有限元仿真曲线下降段的后部分具有不同于线性过阻尼系统响应的震荡过程,这是因为开关的运动过程并非都伴随碰撞,在质量块重新恢复到初始位置后,在小范围内的往复运动不再碰撞。上升段关系到位移响应的最大值以及响应时间,是更受到关心的。简化模型虽然无法描述单次碰撞过程,但是描述质量块上升的整体过程具有一定的精度,方便工程分析。 图8 带齿形结构的质量块的位移响应 4.1 样件加工 利用UV-LIGA微电铸工艺制作样件的流程如图9所示。首先将作为基底的不锈钢钢板研磨、抛光和清洗,使用甩胶机(KW-4A)将SU-8 2015胶涂于基片表面,得到厚度约为45 μm的胶模(图9(a))。然后在恒温保烘箱中采用阶梯升温的方式进行前烘,前烘后的胶模跟随保烘箱冷却。接下来使用休斯紫外光刻机进行曝光,曝光剂量为450 mJ/cm2,时间为45 s。使用SU-8 胶进行显影,将基片充分浸入显影液中,并附加振动,使未曝光的SU-8胶溶胀去除,显影时间为 3~8 min。最后将基片放入电铸槽内进行电铸(电铸条件见表2)得到30 μm的第一层结构(图9(b))。使用相似的甩胶和电铸工艺,得到20 μm 的第二层结构(图9(c))。由于第三层具有悬空结构,所以使用磁控溅射仪(JS3X-808)溅射厚度约为200 nm的种子层(图9(d))。通过重复以上各步骤,得到各层结构(图9(e)~(g))。利用湿法化学去胶技术,去除开关中的SU-8光刻胶,释放出悬空的微结构(图9h)。开关样件SEM图像如图10所示。 表2 电铸液配比和工艺条件 图9 开关工艺流程 图10 微加速度开关SEM图像 4.2 试验装置 3 000g/3 ms加速度实际为模拟武器发射,幅值较大且持续时间较长,实验室条件下很难获得。因此,利用旋转试验台测试开关的静态闭锁阈值,再由落锤测试系统产生高幅值窄脉宽加速度,以验证开关的功能特性。 用于测试开关静态加速度阈值的旋转试验系统如图11所示,测试系统主要包括旋转台及其控制器、显微镜和计算机。利用夹具将开关固定在合适的位置,使其敏感方向和离心力方向一致,并测量开关到旋转中心的距离。利用旋转台计算机阶梯式的调整旋转台的转速,并实时计算出离心加速度。由于在旋转台上安装数据采集系统会使得旋转不稳,因此利用显微镜及其显示计算机观察开关的通断状态。 模拟15 000g/0.3 ms半正弦加速度的落锤测试系统,如图12所示,系统主要包括冲击落锤和数据采集系统。数据采集系统由电源、数据采集器、加速度计及其电荷放大器以及计算机等组成。开关样件通过夹具固定在落锤的锤头上,电源和限流电阻与开关样件组成回路。当锤头撞击平板产生冲击加速度时,由数据采集器记录加速度信号和开关通断信号。 图11 旋转试验系统 图12 落锤测试系统 4.3 试验结果 对开关的旋转离心试验表明,当加速度为2 385.3g时开关仍处于断开状态,加速度达到2 475.6g时观察到开关接通,开关接通后的SEM图像如图13所示,在锁钩的作用下锁头和弧形触头紧密接触。因此开关的静态加速度阈值为2 385.3~2 475.6g。 使用落锤冲击产生的加速度信号及开关信号曲线如图14所示,上部曲线是加速度信号曲线,幅值为1.53 V,传感器总灵敏度为0.1 mV/g,此时加速度为15 320g。下部曲线为开关信号曲线,开关信号存在3个尖峰,这是由于在此加速度作用下,开关因锁头和锁钩外表面接触而短暂接通了3次。但是由于质量块没有撞击到锁头,闭锁模块自身不能闭锁,载荷消失之后锁头便会返回初始位置。 图13 微开关闭锁状态SEM图像 图14 加速度信号和开关信号 由有限元仿真和离心试验结果可知,开关在长脉冲(离心加速度可认为具有无限长的脉宽)加速度作用下幅值小于等于3 000g时即能闭锁。而在窄脉冲加速度作用下,即使幅值超过15 000g也不能闭锁。由此验证了这种带齿形结构的开关具有区分加速度脉宽,且在长脉冲加速度作用下敏感闭锁的特性。 本文提出了一种基于齿形结构的长脉冲敏感型微加速度开关。介绍了开关结构和工作原理,对开关进行了理论分析和有限元分析,并对开关模型进行了简化。采用UV-LIGA技术制作了开关样机。最后,利用样机试验和有限元分析相结合的方法,对开关的功能特性进行了验证。仿真得到,开关在3 000g/3 ms半正弦加速度作用下可靠闭锁。试验得到,开关的静态闭锁阈值为2 385.3~2 475.6g,开关在15 000g/0.3 ms半正弦加速度作用下没有闭锁,实现了设计功能。相比于传统微开关,开关具有2个串联分布的功能模块,各自实现闭锁和敏感响应的功能。通过分离闭锁机构和质量块实现了稳定可靠的闭锁,基于质量块与齿形导杆的碰撞实现了对加速度脉宽的敏感响应,增强了微开关的功能,提高了微开关的适用范围。 [1] XI Z, ZHANG P, NIE W,etal.. A novel MEMS omnidirectional inertial switch with flexible electrodes [J].Sensors&ActuatorsAPhysical, 2014, 212(6):93-101. [2] CAO Y, XI ZH W, YU P X,etal.. A MEMS inertial switch with a single circular mass for universal sensitivity [J].JournalofMicromechanics&Microengineering, 2015, 25(10). [3] CURRANO L J, BECKER C R, LUNKING D,etal.. Triaxial inertial switch with multiple thresholds and resistive ladder readout [J].Sensors&ActuatorsAPhysical, 2013, 195(2):191-197. [4] KIM H, JANG Y H, KIM Y K,etal.. MEMS acceleration switch with bi-directionally tunable threshold [J].Sensors&ActuatorsAPhysical, 2014, 208(2):120-129. [5] MA C W, HUANG P C, KUO J C,etal.. A novel inertial switch with an adjustable acceleration threshold using an MEMS digital-to-analog converter [J].MicroelectronicEngineering, 2013, 110(20):374-380. [6] 黄新龙, 熊瑛, 陈光焱,等. UV-LIGA技术制作微型螺旋形加速度开关[J]. 光学 精密工程, 2010, 18(5):1152-1158. HUANG X L, XIONG Y, CHEN G Y,etal.. Fabrication of micro spiral acceleration switch using UV-LIGA technology [J].Opt.PrecisionEng., 2010, 18(5):1152-1158. (in Chinese) [7] CHEN W, YANG Z, WANG Y,etal.. Influence of applied acceleration loads on contact time and threshold in an inertial microswitch with flexible contact-enhanced structure [J].Sensors&ActuatorsAPhysical, 2014, 216(3):7-18. [8] WANG Y, YANG Z, XU Q,etal.. Design, simulation and characterization of a MEMS inertial switch with flexible CNTs/Cu composite array layer between electrodes for prolonging contact time [J].JournalofMicromechanics&Microengineering, 2015, 25(8). [9] CURRANO L J, YU M, BALACHANDRAN B. Latching in a MEMS shock sensor: Modeling and experiments [J].Sensors&ActuatorsAPhysical, 2010, 159(1):41-50. [10] GUO Z Y, ZHAO Q C, LIN L T,etal.. An acceleration switch with a robust latching mechanism and cylindrical contacts [J].JournalofMicromechanics&Microengineering, 2010, 20(5). [11] TSAI T Y, YEH C L, LAI Y S,etal.. Response spectra analysis for undamped structural systems subjected to half-sine impact acceleration pulses [J].MicroelectronicsReliability, 2007, 47(8):1239-1245. [12] GILARDI G, SHARF I. Literature survey of contact dynamics modelling [J].Mechanism&MachineTheory, 2002, 37(10):1213-1239. [13] HEMKER K J, LAST H. Microsample tensile testing of LIGA nickel for MEMS applications [J].MaterialsScienceandEngineering:A, 2001, 319: 882-886. 步 超(1991-),男,江苏扬州人,博士研究生,2014于南京理工大学获得学士学位,主要从事MEMS惯性器件的设计与可靠性研究。E-mail:buxychao@163.com 导师简介: 聂伟荣(1969-),女,山西原平人,博士,副教授,2002于南京理工大学获得博士学位,主要从事引信MEMS安全系统技术研究以及智能探测与控制技术研究。E-mail:njnwr@hotmail.com (版权所有 未经许可 不得转载) Micro acceleration switch with tooth-shaped structure for long pulse sensitivity BU Chao, NIE Wei-rong*, LUO Qiao, ZHOU Zhi-jian (School of Mechanical Engineering,NanjingUniversityofScienceandTechnology,Nanjing210094,China) A micro acceleration switch for long pulse sensitivity was proposed to meet the requirement of a power management system of intelligent weapons for switch latching/unlatching. The switch was designed by using a suspended mass with tooth-shaped structure and a tooth shape guide and the energy dissipation was realized by the mutual collision of the mass and tooth shape guide during the moving process. The switch could implement the unlatch under the high amplitude and narrow pulse width acceleration and the latch under the low amplitude and long pulse width acceleration reliably. The structure and working principle of the switch were introduced. Then, the theoretical analysis and finite element analysis(FEA) of the switch were carried out and its model was simplified. A prototype switch was prepared by UV-LIGA technology, and the functional properties of the switch were verified by the combination of FEA and prototype test. The FEA shows that the switch latches reliably under 3 000g/3 ms half sine acceleration pulse. The centrifugal test result shows that the static latching threshold of switch is from 2 385.3gto 2 475.6g. The dropping shock test and FEA results show that the switch do not latch under 15 000g/0.3 ms half-sine acceleration. These results demonstrate that the switch meets the design requirements and can be applied to the occasions where the pulse width is required to be distinguished. Micro Electro-mechanical System(MEMS); acceleration switch; long pulse sensitive switch; dynamic response; tooth structure 2016-05-07; 2016-06-20. 国家自然科学基金资助项目(No.51475245) 1004-924X(2016)11-2730-08 TM564 A 10.3788/OPE.20162411.2730 *Correspondingauthor,E-mail:njnwr@hotmail.com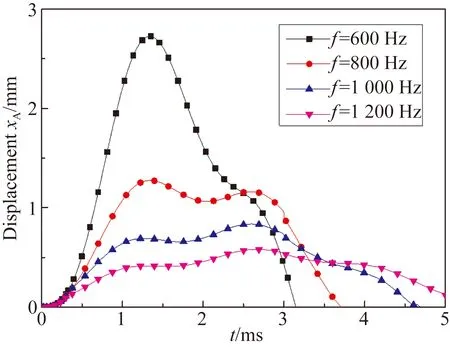









4 试验验证







5 结 论


