同心多尺度成像模式下的高分辨子成像系统设计
2016-12-19吴雄雄王晓蕊张建磊
吴雄雄,王晓蕊,袁 影,张建磊
(西安电子科技大学 物理与光电工程学院,陕西 西安 710071)
同心多尺度成像模式下的高分辨子成像系统设计
吴雄雄,王晓蕊*,袁 影,张建磊
(西安电子科技大学 物理与光电工程学院,陕西 西安 710071)
以同心多尺度成像模式为基础,结合人眼视网膜凹成像思想,提出了一种宽视场与双分辨率成像组合的新型同心多尺度成像系统,在广域视场范围内实现了对关注的感兴趣目标区域的高分辨动态注视。介绍了同心多尺度双分辨率成像系统的工作方式;使用一个单透镜和一个双胶合透镜为初始结构,结合二轴微机电系统(MEMS)扫描微镜组合形成光路;利用ZEMAX光学设计软件,优化设计了成像波段为0.486~0.656 μm,在单个分通道视场内(30°)可对关注的小视场区域(6°)高分辨注视跟踪的子成像系统。 对成像系统的像质以及点列图、调制传递函数(MTF)曲线、场曲、畸变曲线进行了评价。结果表明设计的子成像系统在全视场内成像均匀,接近衍射极限,场曲和畸变较小,最大场曲不超过0.6 mm,最大畸变小于1.5%,能够满足同心多尺度双分辨率成像系统对子成像系统性能的要求。
同心多尺度成像系统;凹成像;双分辨率成像;MEMS扫描微镜;高分辨动态注视;宽视场
1 引 言
视场角和分辨率是光学系统非常重要的两个性能指标。大视场能够覆盖宽广的范围发现更多的目标,高分辨率能够看到目标更多的细节。大视场高分辨成像一直是天文观测、空天广域监视等领域的发展方向[1-3],但是受限于成像系统的比例法则[4],传统成像系统无法兼顾大视场和高分辨率的成像要求。
为解决该问题,国内外学者探索并提出了多种大视场与高分辨统一的典型成像方式。国内学者韩昌元研究了高分辨空间相机的光学系统,分析比较了多种光学系统结构,得到了不同相对孔径和不同视场角的光学设计结果[5]。杨立保等人提出了多镜头成像拼接的方法,并将该方法应用于经纬仪系统[6]。薛庆生等人采用先视场分离分光,再用分色片分光的设计方法,设计了一种大视场高分辨的星载成像光谱仪[7]。王红分析了超广角光学系统的结构形式、像差平衡以及像面照度的一致性,设计了工作于0.254~0.272 μm波段的大视场、大相对孔径紫外光学系统[8]。国外Sargen等人利用高分辨相机扫描的方式获得了宽视场高分辨率图像,但是该方式只适用于静态场景[9]。Wilburn等人使用相机阵列来实现高分辨成像,但是该方法的物理尺寸太大,成本太高[10]。通过拼接多个探测器可以获得连续的更大的探测器,从而实现大视场高分辨率成像,但是该方法存在拼接缝隙,图像内存在盲区[11]。使用鱼眼透镜可以实现大视场成像[12-13],但是在实现大视场成像的同时,其像面存在畸变,尤其是边缘处信息被严重压缩,损失较大。哥伦比亚大学的Cossairt等人利用计算成像的方法,例如去模糊方法等,在相机尺寸较小的情况下获得了更大的分辨率[14-15]。他们同时利用球透镜和球面探测器实现大视场成像,但是系统存在较大的球差和色差,且这些像差不能完全被计算成像消除。美国杜克大学的Brady等人提出了多尺度光学系统[16],该系统是由一个大的物镜和一系列小的光学元件组成的多孔径阵列结构,由于多孔径阵列由不同的光学元件组成,所以生产和装配比较困难。因此Brady等人把物镜设计为同心对称结构,提出了同心多尺度光学系统,从而使多孔径阵列不同位置的光学元件完全一致[17-19]。依照同心多尺度思想设计的AWARE-2相机拥有的视场为120°×50°,角分辨率为38 μrad[17],AWARE-10拥有相机100°×60°的视场,角分辨率为25 μrad[20-21]。但是过多的微相机导致背景视场的采样数据量过多,后续图像处理与传输的工作量庞大。这些方法都是为了能够实现广域监视和高分辨率的统一,但都存在一定的难度,且这些类型的成像系统均无法实现广域场景中运动目标的动态跟踪。
为实现运动目标的广域监视和高分辨率动态跟踪,本文结合同心多尺度和双分辨率成像的思想[22-24],提出了同心多尺度双分辨率成像系统,重点设计了系统中能够对关注区域进行高分辨动态注视跟踪的子成像系统,为研制同心多尺度双分辨率成像系统奠定基础。
2 同心多尺度双分辨模式介绍
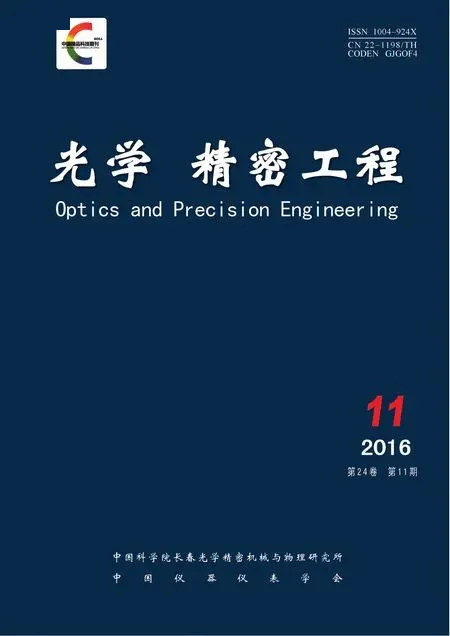
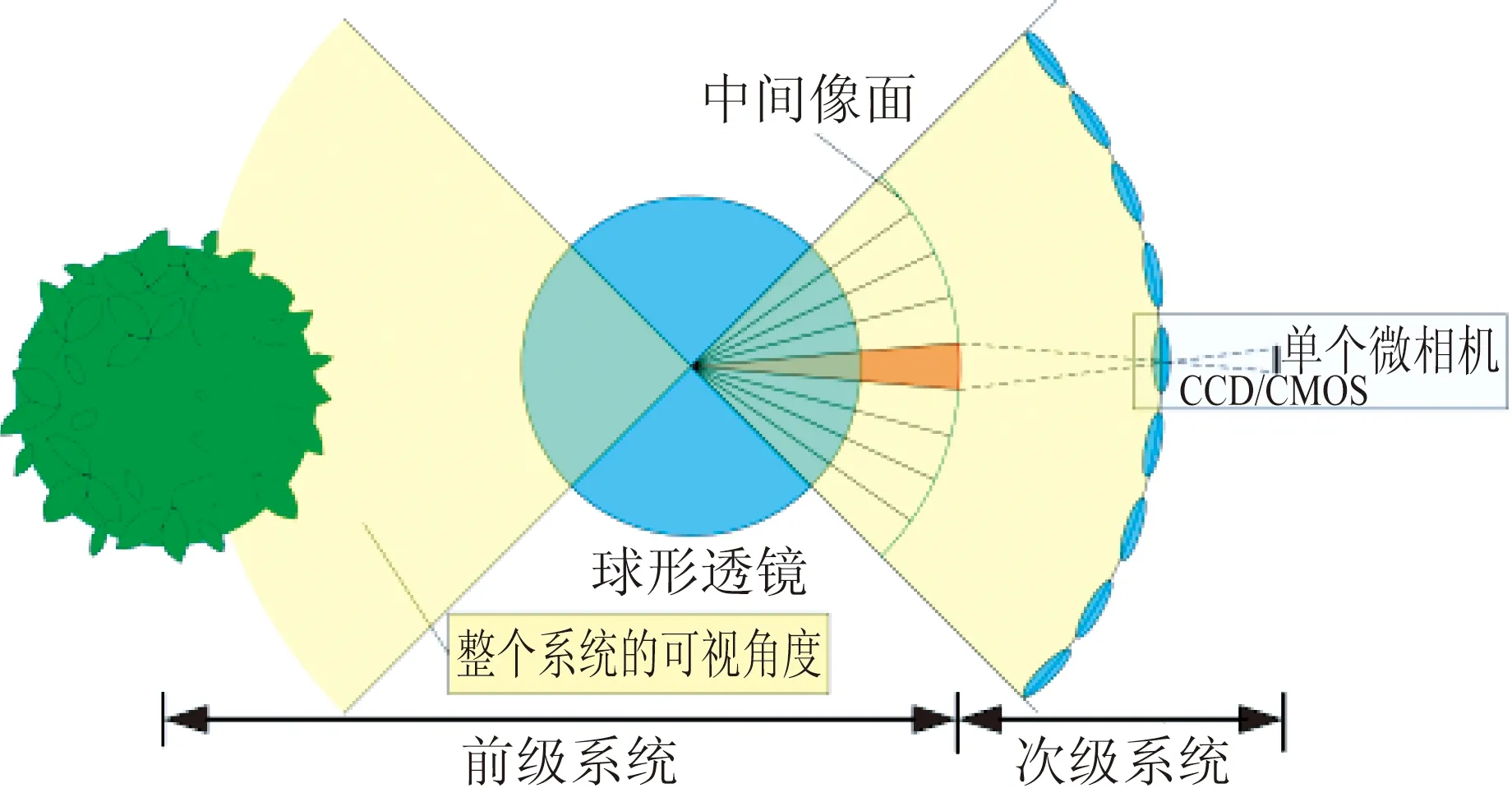
Brady等人提出的同心多尺度成像系统使用大量的微相机组成相机阵列来分割中间像面,以进行二次成像,如AWARE-2系统拥有98个微相机,AWARE-10系统拥有382个微相机。因此每个微相机的视场较小,覆盖的中间像面小,可以近似看作平面,如图1(a)所示。但是过多的微相机导致背景视场的采样数据量过多,后续图像处理与传输的工作量庞大,且装备比较复杂,成本较高。为了避开这种高密度相机阵列设计,本文使用3×3个微相机作为次级光路分割同心主透镜,从而获得外围背景大视场,如图1(b)所示,每个微相机通道分割的视场相对较大,但是分辨率会较低。
(a)多个微相机组成阵列
(b)3×3个微相机组成阵列
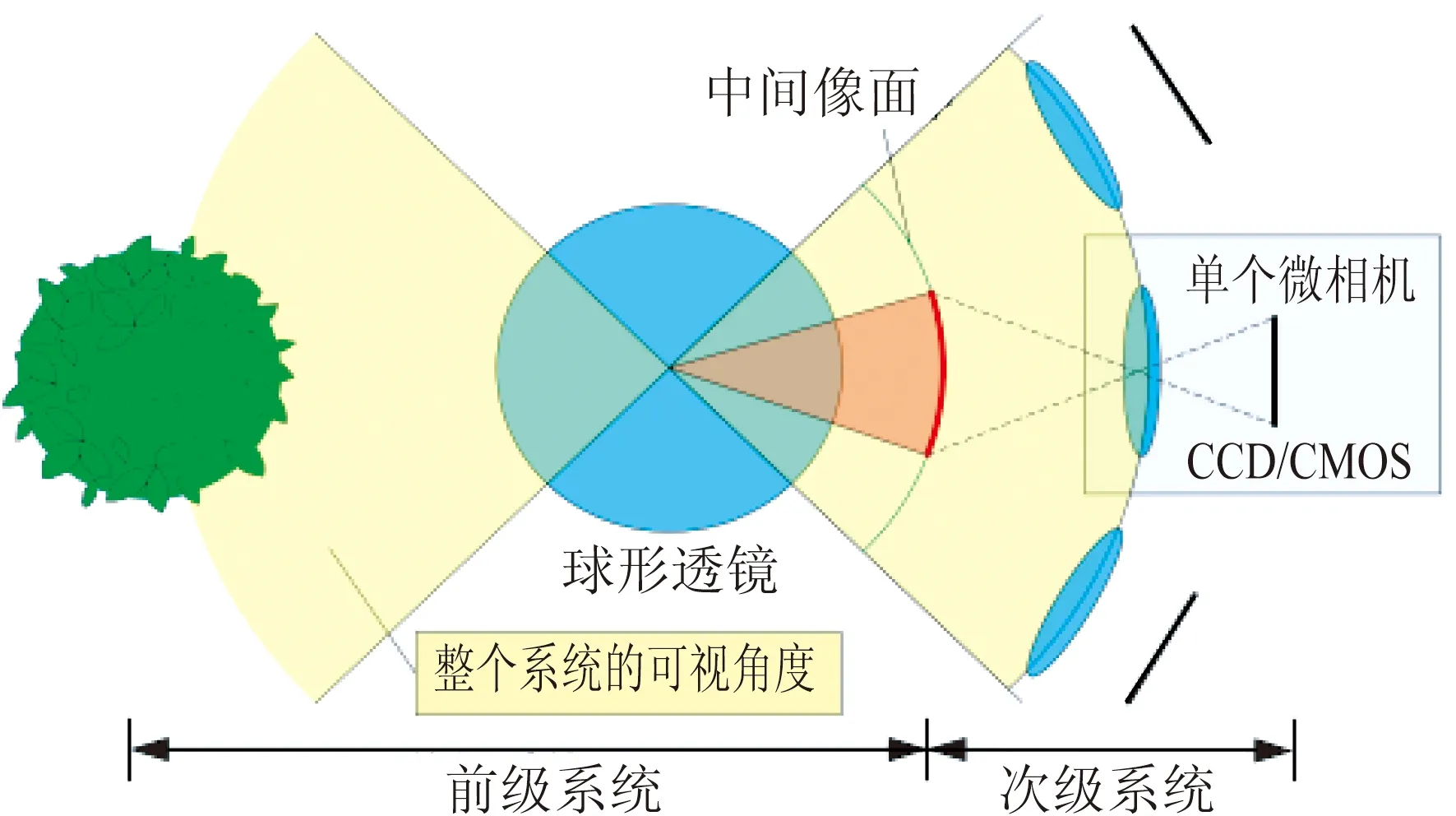
为了让系统同时具备高分辨率成像和对运动目标快速注视的能力,在每个分视场通道内加入高分辨小视场扫描子系统,在每个分视场内对关注区域进行高分辨扫描注视成像,从而实现大视场广域高分辨成像,系统原理如图2所示。
图2 同心多尺度双分辨率成像系统的原理图
Fig.2 Schematic diagram of monocentric multiscale dual resolution imaging system
为了使得整个系统装配紧凑,分视场微相机和高分辨小视场子成像系统共用一个同心球形物镜。该物镜具有多层球壳,球壳越多越复杂,可优化的自由度越多,成像质量越好[25]。本文作为一个简单设计实例,选用单层同心球形透镜作为整个系统的物镜。把球形透镜看作厚透镜,得到透镜焦距为[26]:
f=nR/2(n-1),
(1)
式中:n为球形透镜的折射率,R为球形透镜的半径。在各个分通道中插入分束镜,分束镜位于中间像面之后,把一个通道的成像光束分成两束:其中一束进入微相机光路,对分割的背景视场成像;另外一束进入高分辨小视场扫描系统。高分辨小视场扫描系统由准直透镜,二轴MEMS扫描微镜和高分辨成像传感器组成,如图2所示。准直透镜把透过分束镜的光线汇聚到MEMS扫描微镜。通过瞬时倾斜MEMS微镜的角度,使得MEMS微镜的垂轴线指向关注区域,光线经过MEMS微镜反射被重新准直并与系统光轴平行,再次被准直透镜会聚,最终进入成像传感器,在成像传感器上形成关注区域的高分辨率图像。通过驱动MEMS微镜的摆动,高分辨小视场能够在分割的背景视场内进行扫描,如图3所示,图中箭头方向表示高分辨小视场的扫描方向。分通道微相机对广域背景视场进行分割成像,其分辨率相对较低,能分辨可疑目标即可。多个通道的分视场拼接形成广域视场。在广域视场监视中,当发现可疑目标成像在某个分割的通道视场内时,在对应的分割通道内,通过驱动MEMS实现高分辨小视场子成像系统对关注区域的扫描成像,从而完成对关注目标的高分辨动态跟踪。
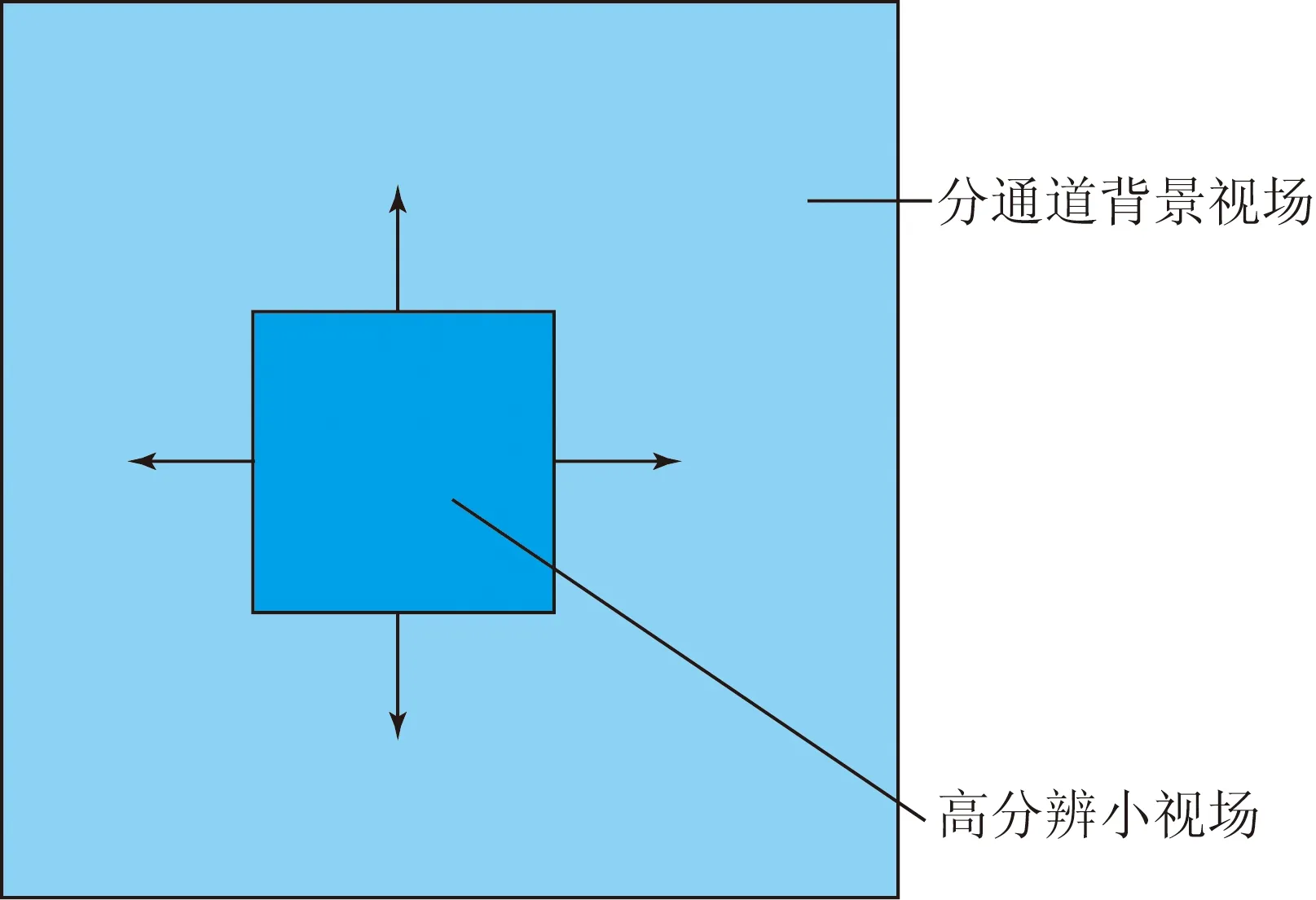
图3 高分辨小视场在分通道背景视场中的扫描成像路径
Fig.3 Scanning route of sub-imaging system with high resolution and small field of view in divided background field of view
3 高分辨小视场光路设计
小视场区域高分辨成像的子成像光路与分视场微相机共用一个同心球形物镜,同心球形物镜使用常见的玻璃材料BK7,半径为50 mm。本文使用一个单透镜和一个双胶合透镜为初始结构进行优化设计,成像波段为可见光0.486~0.656 μm。设计的单个分通道背景视场为30°,在分通道背景视场内扫描移动的子通道高分辨小视场为6°。分通道背景视场之间有重叠,用于后期的图像拼接,以实现宽视场广域成像。
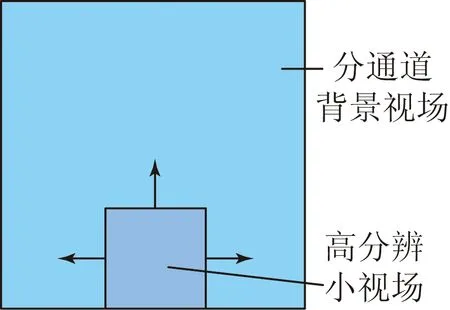
当MEMS摆角为0°(与Y轴夹角)时,子通道高分辨小视场位于分通道背景视场的中心位置,如图4所示。
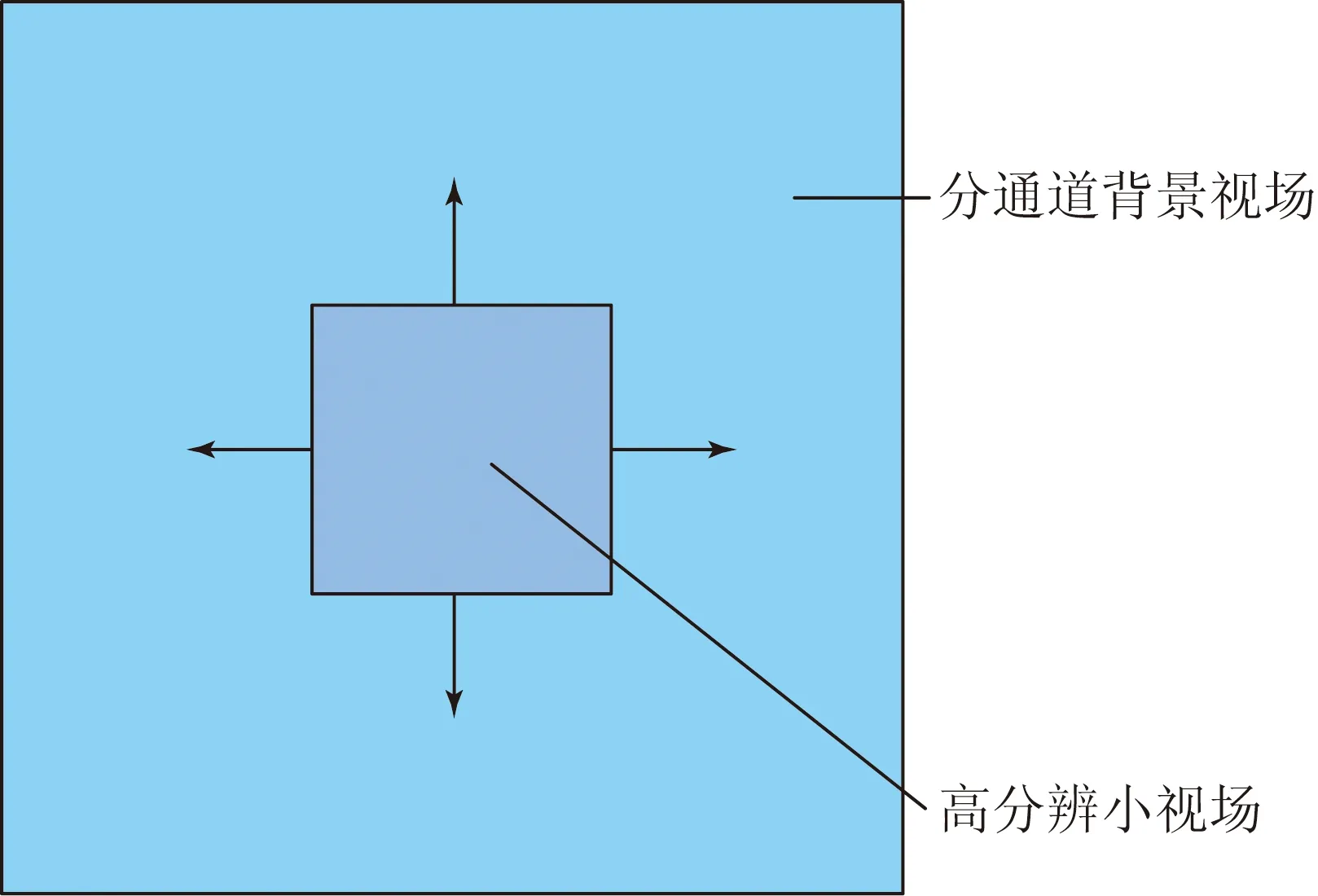
图4 高分辨小视场位于分通道背景视场的中心位置
Fig.4 High resolution small field of view located in center of divided background FOV
该子通道成像系统覆盖的视场为-3°~3°(Y方向),优化得到的设计结构如图5所示。
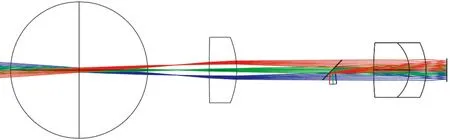
图5 高分辨率小视场成像光路结构
Fig.5 Layout of sub-imaging system with high resolution and small field of view
图6(a)为设计得到的子通道成像系统在典型视场-3°,0°,3°的全谱段点列图。从图6(a)可以看出,3个典型视场的弥散斑RMS值接近,成像质量均匀,以中心视场0°对称。图6(b)为该成像光路的调制传递函数(Modulation Transfer Function,MTF),可以看出设计的光路成像性能良好,接近衍射极限。该成像光路的场曲/畸变如图6(c)所示。由于需要对关注区域位置准确定位,用来驱动MEMS摆动角度,因此场曲和畸变要小。从图6(c)可以看出,场曲在0.5 mm以内,最大畸变量小于0.43%,均较小,能够满足成像要求。
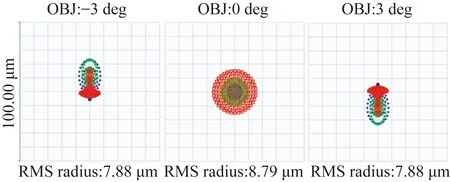
(a)典型视场点列图
(b)MTF曲线
(c)场曲和畸变
Fig.6 Performance of sub-imaging optical system for tilt angle of MEMS of 0°
当子通道小视场位于分通道视场的边缘位置时,如图7(a)和7(b)所示。此时MEMS摆角分别为2.985°和-2.985°,覆盖视场分别为9~15°和-9~-15°。随着MEMS摆角在-2.985~2.985°变化,子通道小视场在分通道背景视场-15~15°(Y方向)内扫描。图8显示了当MEMS微镜摆角为2.985°(与Y轴夹角)时的成像光路。
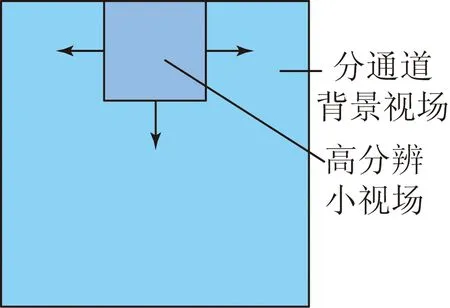
(a)上边缘(a)Top edge
(b)下边缘(b)Bottom edge
Fig.7 High resolution small field of view located by edges of divided background FOV
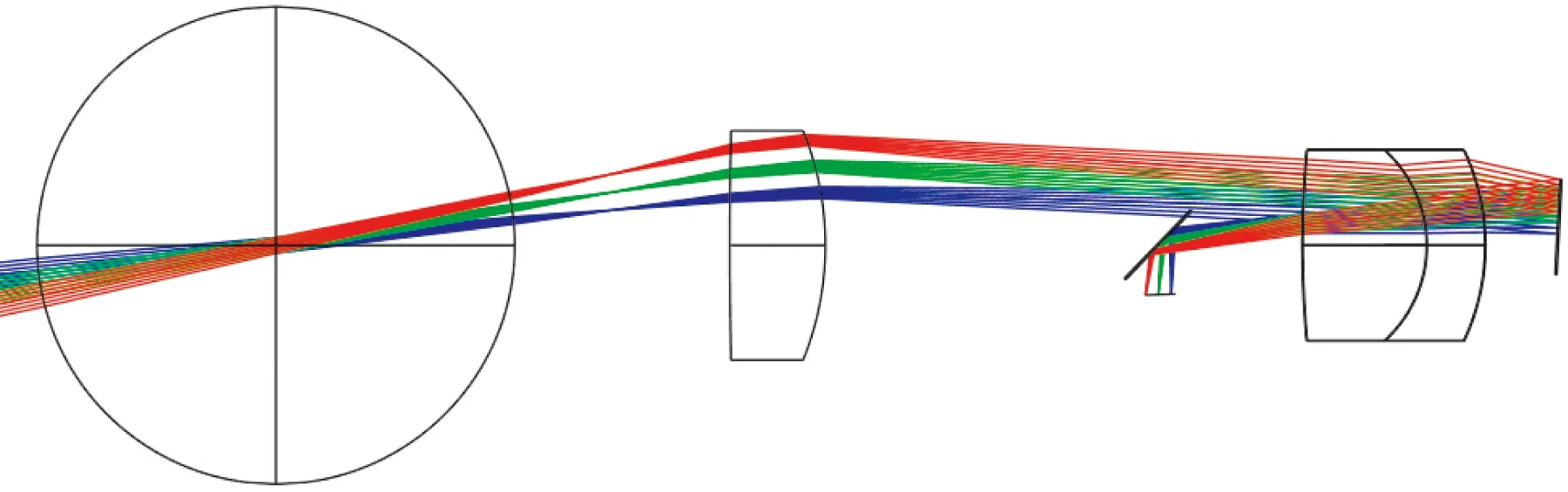
图8 MEMS扫描微镜摆角为2.985°时高分辨率小视场成像光路结构
Fig.8 Layout of sub-imaging system with high resolution and small field of view when MEMS scanning microlense tilted 2.985°
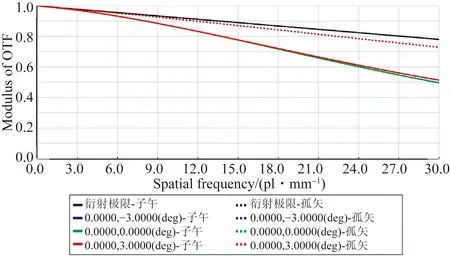
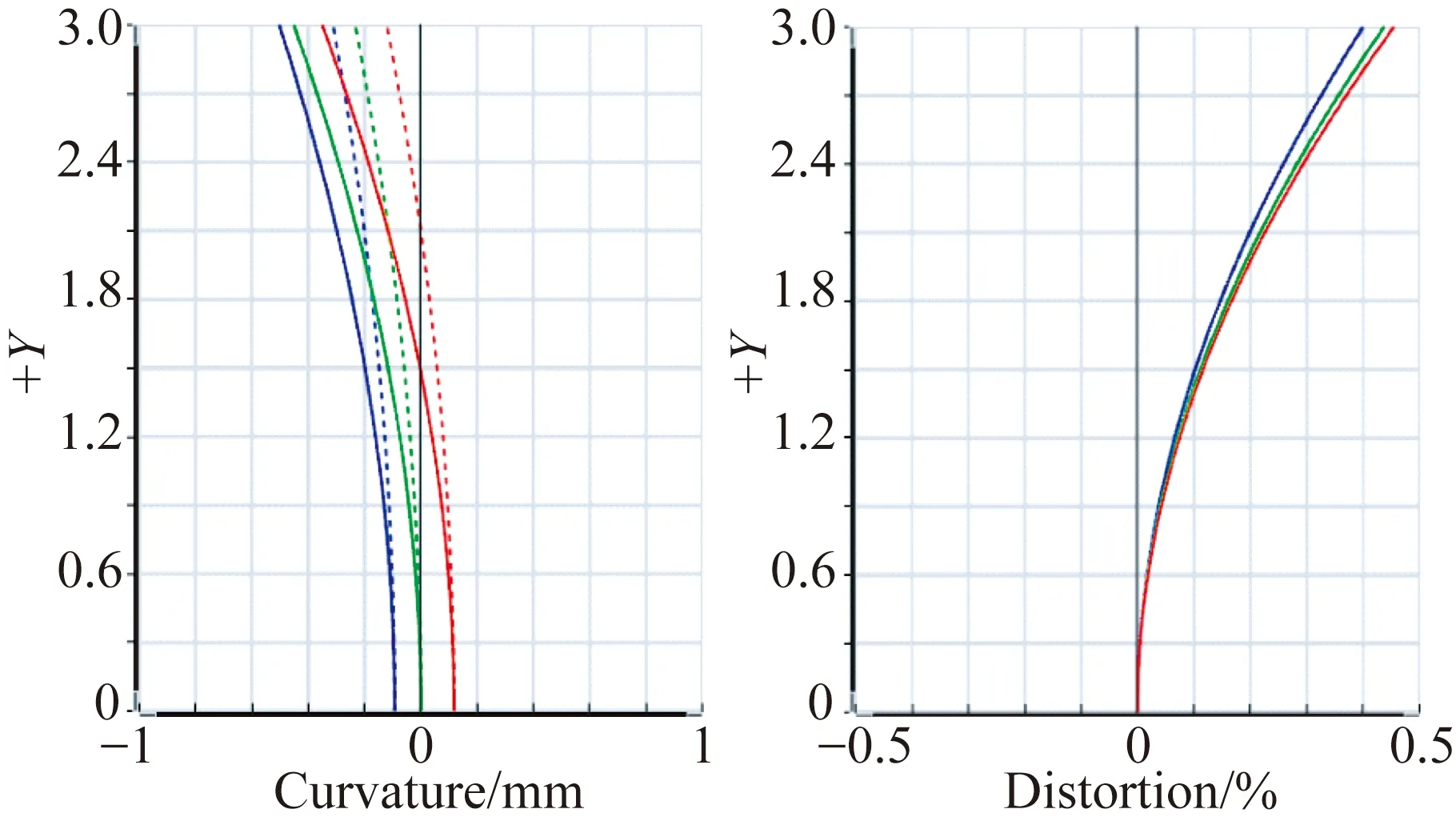
该设计结构的像质评价点列图如图9(a)所示,MTF如图9(b)所示,场曲/畸变如图9(c)所示,场曲在0.6 mm以内,最大畸变量小于1.5%。从以上像质评价曲线可以看出,子成像系统的像质随着视场的增大而降低,因此,设计的分通道背景视场不能过大(-15°~15°)。
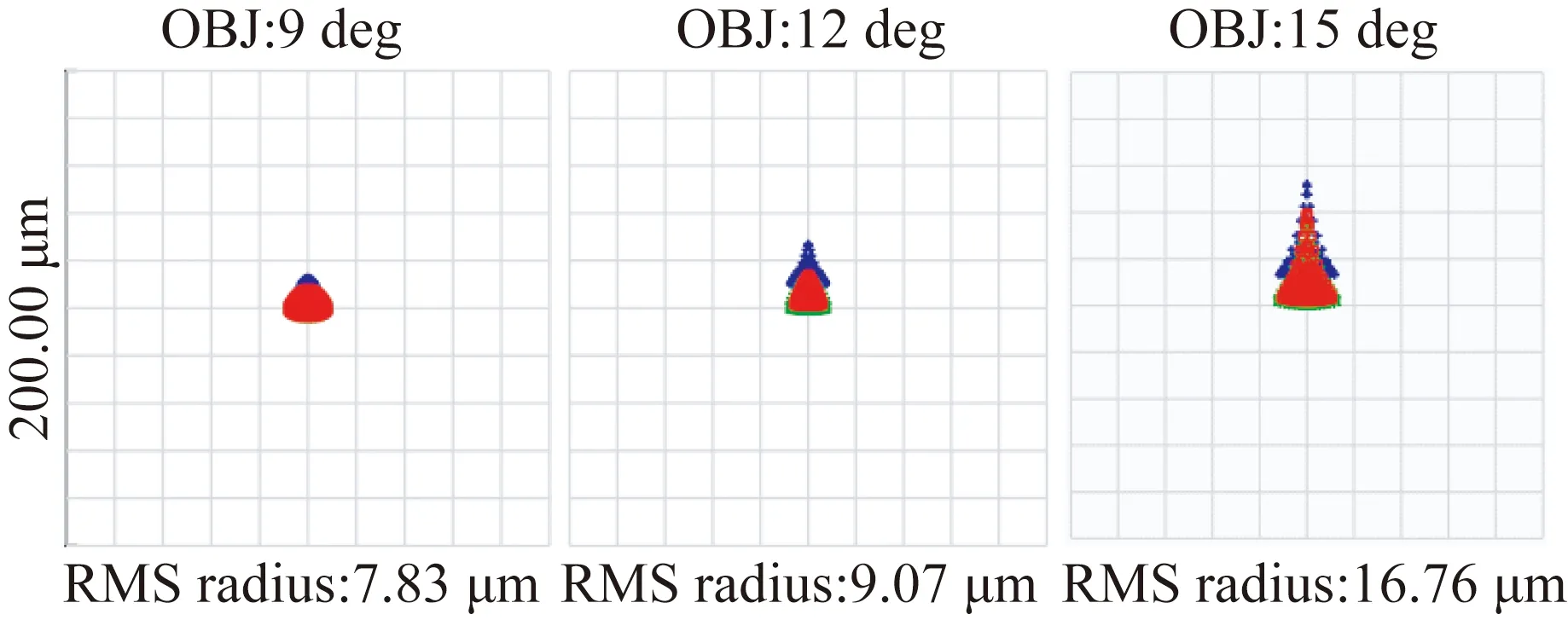
(a)典型视场点列图
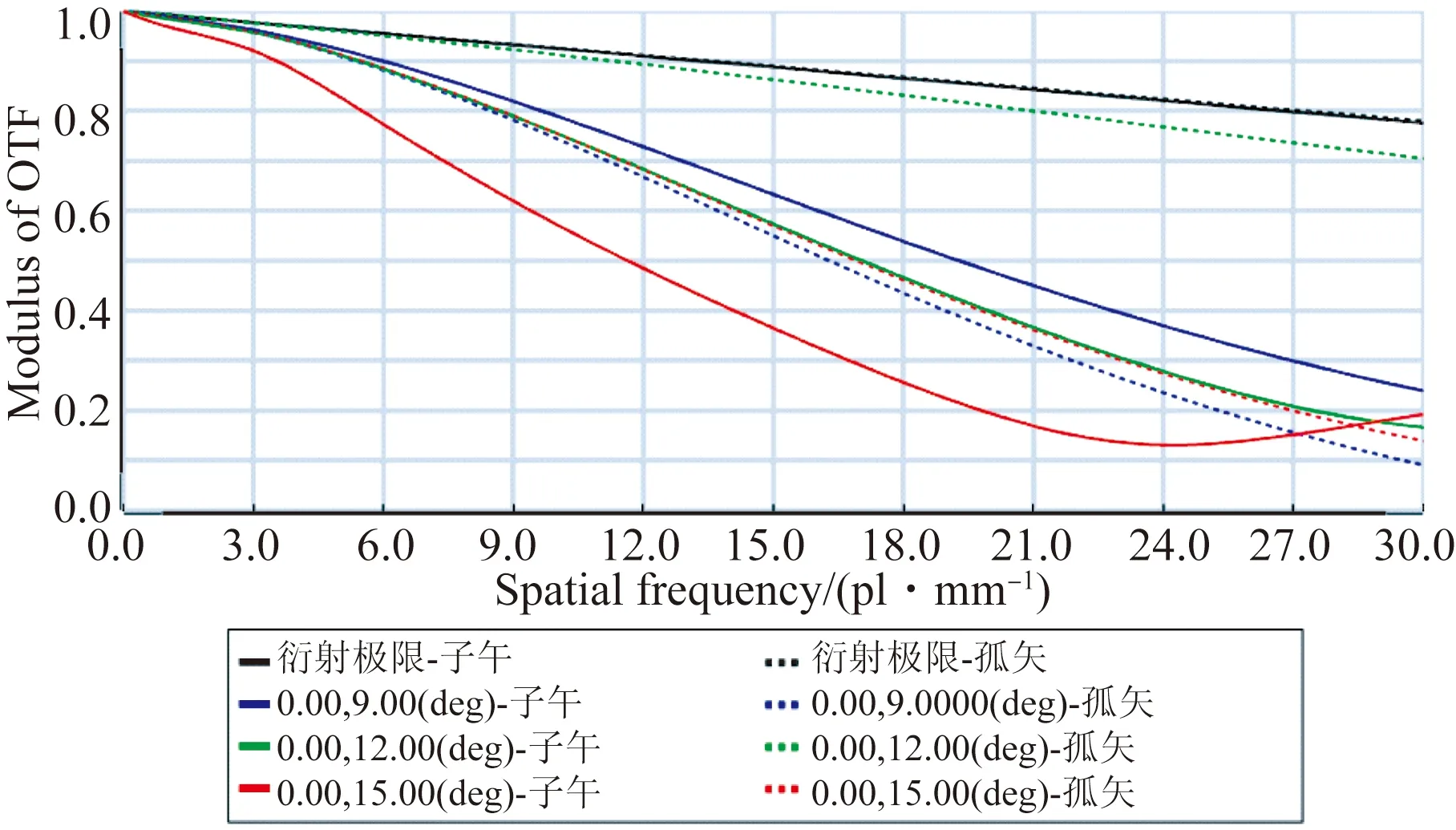
(b)MTF曲线
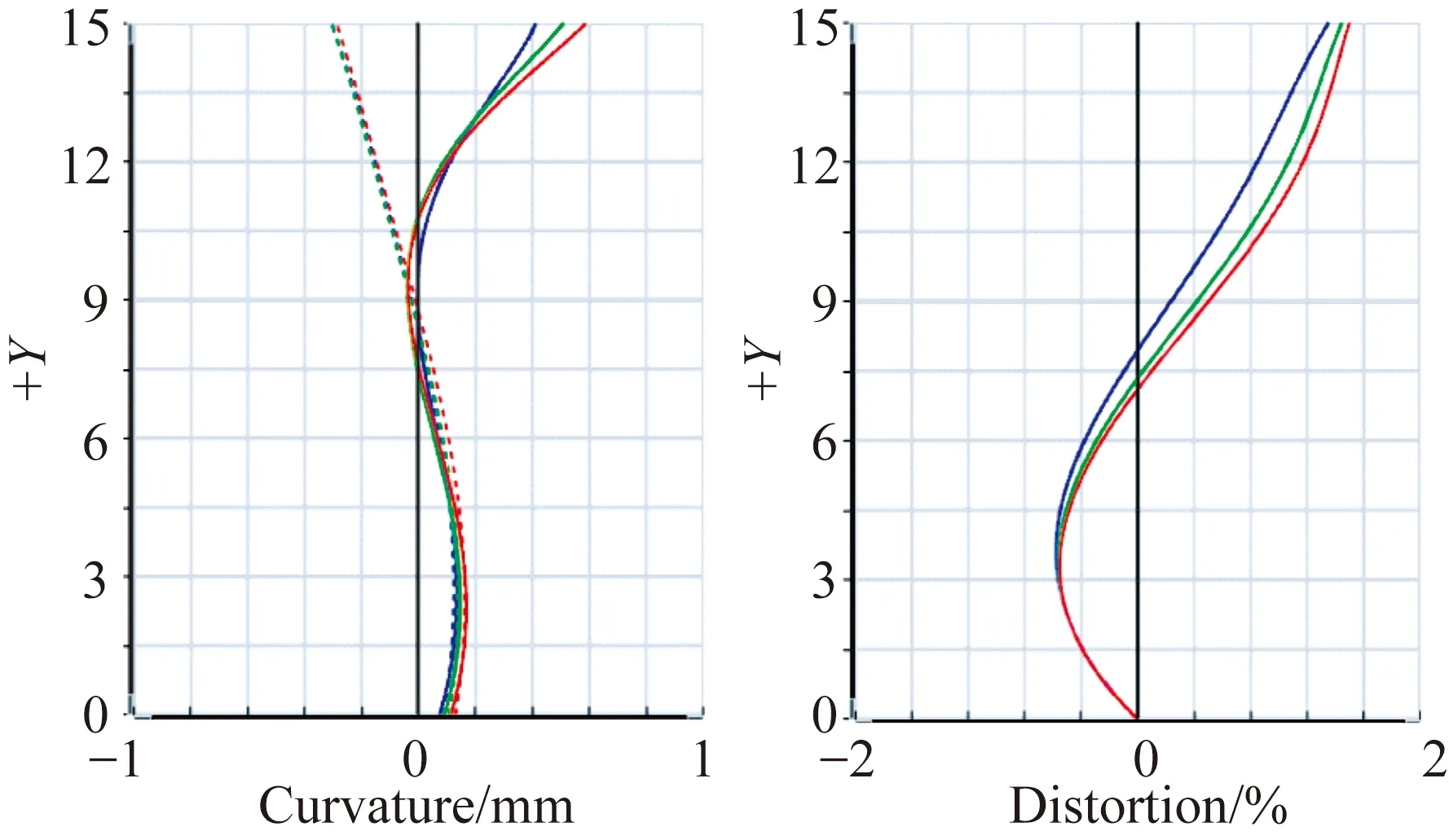
(c)场曲和畸变
Fig.9 Peformance of sub-imaging system for tilt angle of MEMS of 2.985°
从子通道小视场的成像光路图中可以看出,光路中单透镜和双胶合透镜之间的距离较远,这样有足够的距离来布置分束镜及MEMS镜。该光学系统光路简单、成像性能良好。整个光路的镜片由球形物镜,单透镜和双胶合透镜组成,透镜片数较少,容易装配布局,能够满足设计要求。随着MEMS微镜摆动角度的变化,子通道成像视场能够在一定的分视场内进行扫描成像,实现对关注区域内目标的动态跟踪。
4 结 论
本文在同心多尺度成像系统的基础上,结合人眼视网膜凹成像思想,提出了一种宽视场与双分辨率成像组合的同心多尺度成像系统。以简单透镜为初始结构,使用ZEMAX光学设计软件优化设计了所提系统中在单个分通道视场内(30°)对关注的小视场区域(6°)高分辨注视跟踪的子通道成像系统。从成像系统的点列图、MTF曲线、及场区/畸变曲线评价图中可知,该系统的场曲在0.6 mm以内,最大畸变量小于1.5%,成像性能良好,满足性能要求。
[1] ZHU Z, RAJASEKAR K D, RISEMAN E M,etal.. Panoramic virtual stereo vision of cooperative mobile robots for localizing 3D moving objects [C].IEEEWorkshoponOmnidirectionalVision, 2000:29-36.
[2] KAISER N, AUSSEL H, BURKE B E,etal..Pan-STARRS: a large synoptic survey telescope array [J].SPIE, 2002, 4836:154-164.
[3] LEININGER B, EDWARDS J, ANTONIADES J,etal.. Autonomous real-time ground ubiquitous surveillance-imaging system (ARGUS-IS) [J].SPIE, 2008, 6981:69810H-69810H-11.
[4] LOHMANN A W. Scaling laws for lens systems [J].AppliedOptics, 1989, 28(23):4996-4998.
[5] 韩昌元. 高分辨力空间相机的光学系统研究[J]. 光学 精密工程, 2008, 16(11):2164-2172. HAN CH Y.Study on optical system of high resolution space camera [J].Opt.PrecissionEng, 2008,16(11):2164-2172.(in Chinese)
[6] 杨立保, 李艳红, 王晶,等. 多镜头成像拼接方法在经纬仪系统中的应用[J]. 光学 精密工程, 2010, 18(5):1048-1053. YANG L B, LI Y H, WANG J,etal.. Application of multi-lens image stitching to opto-electronic theodolites [J].Opt.PrecissionEng, 2010, 18(5):1048-1053. (in Chinese)
[7] 薛庆生, 黄煜, 林冠宇. 大视场高分辨力星载成像光谱仪光学系统设计[J]. 光学学报, 2011(8):240-245. XUE Q SH, HUANG Y, LIN G Y. Optical system design of wide-angle and high-resolution spaceborne imaging spectrometre [J].ActaOpticaSinica, 2011(8):240-245. (in Chinese)
[8] 王红. 大相对孔径大视场紫外告警相机光学系统[J]. 光学 精密工程, 2014, 22(12):3212-3216. WANG H. Optical system for ultraviolet warning camera with wide field of view and large relative aperture [J].Opt.PrecissionEng., 2014, 22(12):3212-3216. (in Chinese)
[9] SARGENT R, BARTLEY C, DILLE P,etal.. Timelapse GigaPan: capturing, sharing, and exploring timelapse gigapixel imagery [C].FineInternationalConferenceonGigapixelImagingforScience.Pittsburgh,PA, 2010.
[10] WILBURN B, JOSHI N, VAISH V,etal.. High performance imaging using large camera arrays [J].AcmTransactionsonGraphics, 2005, 24(3):765-776.
[11] SUNTHARALINGAM V, BERGER R, CLARK S,etal.. A 4-side tileable back illuminated 3D-integrated Mpixel CMOS image sensor [C].IEEEInternationalSolid-StateCircuitsConference, 2009:38-39,39a.
[12] ABRAHAM S, FORSTNER W. Fish-eye-stereo calibration and epipolar rectification [J].ISPRSJournalofPhotogrammetryandRemoteSensing, 2005, 59: 278-288.
[13] 王永仲. 鱼眼镜头光学[M]. 北京:科学出版社, 2006. WANG Y ZH.Fish-eyeLens[M]. Beijing: Science Press, 2006. (in Chinese)
[14] COSSAIRT O S, MIAU D, NAYAR S K. Gigapixel computational imaging [C].IEEEInternationalConferenceonComputationalPhotography, 2011:1-8.
[15] COSSAIRT O S, MIAU D, NAYAR S K. Scaling law for computational imaging using spherical optics [J].JOSAA,OpticsImageScience&Vision, 2011, 28(12):2540-2553.
[16] BRADY D J, HAGEN N. Multiscale lens design [J].OpticsExpress, 2009, 17(13):10659-10674.
[17] BRADY D J, GEHM M E, STACK R A,etal.. Multiscale gigapixel photography [J].Nature, 2012, 486(7403):386-389.
[18] TREMBLAY E J, MARKS D L, BRADY D J,etal.. Design and scaling of monocentric multiscale imagers [J].AppliedOptics, 2012, 51(20):4691-4702.
[19] SON H S, JOHNSON A, STACK R A,etal.. Optomechanical design of multiscale gigapixel digital camera [J].AppliedOptics, 2013, 52(8):1541-1549.
[20] MARKS D L, LLULL P R, PHILLIPS Z,etal.. Characterization of the AWARE 10 two-gigapixel wide-field-of-view visible imager [J].AppliedOptics, 2014, 53(13):54-63.
[21] SON H S, MARKS D L, BRADY D J,etal.. Oversampled triangulation of AWARE-10 monocentric ball lens using an auto-stigmatic microscope [J].OpticsExpress, 2013, 21(19):22206-22214.
[22] MARTINEZ T, WICK D, RESTAINO S. Foveated, wide field-of-view imaging system using a liquid crystal spatial light modulator [J].OpticsExpress, 2005, 5874(10):80-86.
[23] WICK D V, MARTINEZ T, RESTAINO S R,etal.. Foveated imaging demonstration [J].OpticsExpress, 2002, 10(10):60-65.
[24] HUA H, LIU S. Dual-sensor foveated imaging system[J].AppliedOptics, 2008, 47(3):317-327.
[25] STAMENOV I, AGUROK I, FORD J E. Optimization of high-performance monocentric lenses [J].AppliedOptics, 2013, 52(52):8287-8304.
[26] MARKS D L, HUI S S, KIM J,etal.. Engineering a gigapixel monocentric multiscale camera [J].OpticalEngineering, 2012, 51(8):527-529.

吴雄雄(1992-),男,陕西延安人,2013年于西安电子科技大学获得学士学位,主要从事光学系统设计方面的研究。E-mail: wuxx1992@126.com
导师简介:

王晓蕊(1976-),男,山东济宁人,博士,教授,博士生导师,1998年于四川大学获得学士学位,2003年、2005年于西安电子科技大学分别获得硕士、博士学位, 主要从事先进光学遥感与光电仿真等方面的研究。E-mail: xrwang@mail.xidian.edu.cn
(版权所有 未经许可 不得转载)
Design of sub-imaging system based on monocentric multiscale dual resolution imaging
WU Xiong-xiong, WANG Xiao-rui*, YUAN Ying, ZHANG Jian-lei
(School of Physics and Optoelectronic Engineering, Xidian University, Xi′ an 710071, China)
A new monocentric multiscale imaging system with a wide field of view and dual resolution was proposed based on the theories of monocentric multiscale imaging and foveated imaging to achieve the high resolution dynamic gazing of the interesting region in a wide-area. The working model of this system was described in detail. By using a single lens and a doublet as the initial structure, two axis MEMS(Micro-Electronic-Mechanical System) micro mirrors were combined to form a light path. On the basis of the ZEMAX software, a sub-imaging system(6°) was optimized and designed to realize the high resolution gazing in the individual separated field of view(30°) at the spectra range from 486—0.656 μm. The image quality, spot diagram, Modulation Transform Function(MTF) curve and the field curvature/distortion curve of the sub-image system were evaluated, and the results show that the imaging is uniform in the full field of view and approaches the diffraction limitation. Moreover, it has smaller field curvature and distortion, the field curvature is smaller than 0.6 mm, and the distortion is smaller than 1.5%. These data meet the requirements of monocentric multiscale dual resolution imaging systems for the performance of sub-imaging systems.
monocentric multiscale imaging system; foveated imaging; dual resolution imaging; MEMS micro mirror; high resolution dynamic gazing; wide field of view
2016-07-18;
2016-08-30.
国家自然科学基金资助项目(No.61007014,No.61575152)
1004-924X(2016)11-2644-07
O435;TH703
A
10.3788/OPE.20162411.2644
*Correspondingauthor,E-mail:xrwang@mail.xidian.edu.cn