离轴三反空间相机主支撑结构优化设计与试验
2016-12-16席佳利张雷解鹏魏磊孔林
席佳利,张雷,解鹏,魏磊,孔林
(1.中国科学院长春光学精密机械与物理研究所,长春130033;2.中国科学院大学,北京100049)
离轴三反空间相机主支撑结构优化设计与试验
席佳利1,2,张雷1,解鹏1,魏磊1,2,孔林1
(1.中国科学院长春光学精密机械与物理研究所,长春130033;2.中国科学院大学,北京100049)
为解决离轴三反空间相机随机响应过大的问题,提出了一种以降低加速度响应均方根值(RMS)为目标的空间相机主支撑结构拓扑优化设计方法。首先,在分析各种空间相机主支撑结构和某离轴三反光学系统特点的基础上,确定了次镜组件和折叠镜组件分开支撑的结构形式。其次,以离轴三反空间相机次镜的加速度响应均方根值为优化目标,以体积分数,X、Y、Z向重力载荷分别作用下次镜的刚体位移,主支撑结构的一阶频率为约束条件对初始主支撑结构有限元模型进行拓扑优化设计,得到了加速度响应满足设计要求的主支撑结构。最后,对该结构进行有限元分析和振动试验,表明了该离轴三反空间相机力学性能指标均满足设计要求,其中Z向2 g RMS量级的随机激励下次镜的加速度响应均方根值为5.08 g;主支撑结构质量仅为3.8 kg,一阶频率达到了291.4 Hz。该离轴三反相机主支撑结构的设计方法可以作为其他同型相机结构设计的参考。
主支撑结构;拓扑优化设计;随机响应;离轴三反相机;桁架结构
0 引言
为增大空间遥感器的观测能力,光学系统的相对孔径和焦距都在不断增大,导致相机设计和发射的难度与成本也随之增大。离轴三反光学系统在不改变相机焦距的条件下可以缩小相机的尺寸,是空间相机的发展趋势之一,已经在国外多个国家的卫星光学有效载荷中得到应用,涉及对地观测、天文观测、多光谱热成像、立体测绘等多个领域。由于离轴三反光机系统结构非轴对称,其主支撑结构设计是公认的难点。
常见的离轴三反空间相机主支撑结构有框架式结构、薄壁式结构和桁架式结构等,如美国EO-1卫星上搭载的高级陆地成像仪(ALI)相机采用了框架式主支撑结构,美国quickbird-2卫星所搭载的空间相机则是采用薄壁式主支撑结构的典型,桁架式结构在日本的ALOS-PRISM空间相机中得到了成功应用[1]。国内也在积极进行离轴三反相机主支撑结构设计方面的研究工作。张雷在Rayleigh法基础上对桁架式主支撑结构桁架杆间夹角与结构基频间的关系进行了研究[2]。辛宏伟、关英俊等通过比对常用主支撑结构得到了初始结构,进而利用灵敏度分析和参数优化设计方法得到了满足设计要求的主支撑结构[3]。郭疆进行了某离轴三反相机的全碳纤维相机机身结构设计方法研究,进而得到了在力、热环境下具有高位置精度和稳定性的离轴三反相机机身机构[4]。本文以某离轴三反相机研制为背景,研究了轻小型离轴三反相机主支撑结构的优化设计方法。
离轴三反相机主次镜间距较远,在运载发射的恶劣动力环境下相比同轴相机将产生更大的响应,可能导致相机的关键部件受损。本文针对离轴三反相机主支撑结构设计现有“静载荷设计为主-校核动态性能”设计方法的缺点,将随机响应分析引入离轴三反相机主支撑结构的拓扑优化设计中。相比于常规设计方法,该设计方法将随机响应纳入结构的初始方案设计中,可以更大程度地改善结构的动力学特性,进而保证相机的强度和成像精度。本文提出的优化策略也可用于其他空间相机的主承力结构设计。
1 随机响应最小化拓扑优化设计原理
1.1 随机响应分析原理
随机载荷具有难以预测和控制的特点,工程中通过研究其统计性规律与这类载荷下系统响应的统计性规律间的联系来评估随机载荷对系统的影响[5]。随机载荷作用下单自由度线性系统的动力学方程为[6]

系统的传递函数H(ω)和幅频特性|H(ω)|分别为

其中:m,c,k分别为系统的质量,阻尼和刚度;F(t)为随机载荷;圆频率
随机激励的功率谱密度Sf和响应的功率谱密度Sx间的关系可以表示为[7]

从而响应的均方根值ψx可以表示为

可以看出,响应的均方根值由系统的质量矩阵、刚度矩阵、阻尼矩阵和随机激励的功率谱密度决定。
1.2 拓扑优化原理
拓扑优化技术以材料分布为优化对象,寻求结构最佳传力路径,用最少的材料满足给定的性能要求。工程中比较常用的是采用固体各向同性惩罚微结构模型(SIMP模型)的拓扑优化技术[8]。基于SIMP材料插值模型的结构拓扑优化,实质是在确定的设计区域内寻找一个最优的材料布局,即确定设计区域哪些点是
材料点,哪些是孔洞(无材料点),是个0~1离散变量优化问题[9],其数学模型:

其中:E0为所选材料的弹性模量,Ω表示原始可设计区域,Ei为原始可设计区域内单元的弹性模量,Ωmat表示优化过程或优化结果中的材料分布区域。以拓扑优化模型中各单元相对密度作为设计变量,可以将结构的拓扑优化设计问题转化为设计区域内材料的最优分布设计问题。优化过程中的每个单元对应一个优化设计变量,通过改变优化变量取值改变结构中单元的弹性模量,进而调节结构的总体刚度,使结构布局趋于最优,优化结果用表示材料分布的相对密度显示。
可以看出,结构的拓扑优化设计结果决定了其动力学方程中的质量矩阵和刚度矩阵。
综上所述,随机响应最小化拓扑优化设计原理,就是通过拓扑优化设计调整结构材料分布来调节结构的质量矩阵和刚度矩阵,达到降低结构关键部位随机响应的目的。
2 光学系统分析
该相机采用一次成像离轴无遮挡三反射系统,焦距为890 mm,光学系统如图1所示。折叠镜的作用在于缩短光路,调整相机焦面位置,缩小相机包络尺寸。
一方面,运载发射过程卫星载体会传递给空间相机很大的沿光轴方向(Z向)的随机载荷,这些随机载荷经逐级放大后将对次镜及其支撑结构产生恶劣的影响[10]。另一方面,离轴三反光学系统中,次镜处在遥感器最远位置,最为敏感,其很小的轴间距、俯仰偏离就会对相机的成像质量产生很大的影响。因而,该离轴三反相机主支撑结构设计过程重点关注次镜的位置精度和动力学特性,并对其他光学元件的力学特性进行校核。总体要求次镜在X、Y、Z向重力分别作用下刚体位移均小于0.005 mm,次镜在光轴方向的随机响应放大率不大于3;主支撑结构的一阶频率不低于260 Hz,质量不大于4 kg。该空间相机主支撑结构设计是该离轴三反空间相机设计的关键部分。
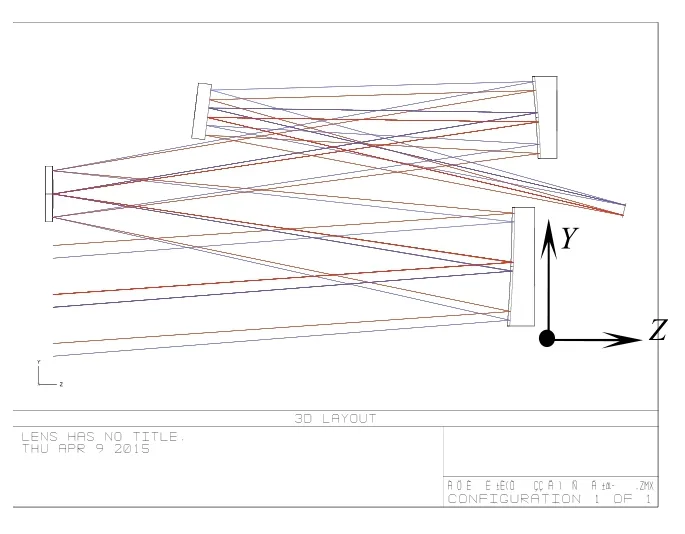
图1 离轴三反相机光学系统Fig.1The optical system of the off-axis three-mirror reflective space camera
3 主支撑结构的优化设计
3.1 主支撑结构形式和材料的选择
为了满足该离轴三反空间相机的质量要求,该空间相机选择桁架式主支撑结构,主要包括各反射镜的安装基板、桁架杆和桁架杆接头[11]。对比各种空间相机材料性能后[12],桁架杆选用碳纤维复合材料M40,反射镜安装基板和桁架杆接头选用钛合金材料TC4。出于碳纤维缠绕工艺考虑,碳纤维桁架杆较少使用开口形状截面,多选择圆形或方形截面,其中圆形截面具有较高的效率。考虑到桁架杆与杆接头间的连接,并兼顾效率,该空间相机主支撑结构选用圆形截面桁架杆。针对该光学系统的特点,三镜组件和主镜组件安装于同一基板上,次镜组件和折叠镜组件分别通过桁架杆与主三镜安装基板相连。
3.2 拓扑优化模型的建立
以主支撑结构形式和材料选择为基础,在避免结构分布于通光口径之内遮拦光线,并尽可能使结构简单可靠的原则下,可以得到主支撑结构的拓扑优化设计初始有限元模型如图2所示。该初始有限元模型中的各基本尺寸由设计经验得到,次镜安装基板和折叠镜安装基板的厚度设定为12 mm,主三镜安装基板厚度设定为24 mm,次镜支撑结构桁架杆设计空间厚度设定为30 mm,折叠镜支撑结构桁架杆设计空间厚度设定为20 mm。

图2 拓扑优化模型Fig 2The finite element model of the supporting structure for the topology optimization design
同时优化桁架杆和安装基板不仅效率低,也不能保证优化结果的可加工性,因而简化优化设计空间,只对桁架杆的布局进行优化设计[12]。将主支撑结构的三个安装基板简化为平板,主镜组件、次镜组件、三镜组件、折叠镜组件均简化为质量点,尽可能保持各反射镜组件的安装位置和安装方式不变,以该空间相机调焦系统安装接口为约束点,采用Optistruct软件对有限元模型进行拓扑优化设计。
3.3 设计变量与优化过程
“尤其是中国公立医疗机构的特殊性,在精益医疗战略指导下,其能帮助实现公益与效益、患者服务和医疗可及性等众多因素间的平衡,更毋庸置疑,该战略对医院纯内部管理维度的提升,还有重要的现实意义和实践价值。”
该离轴三反空间相机主支撑结构拓扑优化设计以降低次镜Z向随机加速度响应RMS值为目标,以体积分数、主支撑结构一阶频率、重力载荷下次镜中心位置位移为约束条件。
该优化问题描述如下:
优化目标:次镜特征点处在Z向随机加速度激励下的响应均方根值最小;
约束条件:主支撑结构一阶频率不小于260 Hz;
次镜特征点处在X、Y、Z向重力分别作用下的位移均小于0.005 mm;
体积分数小于40%;
主支撑结构关于主三镜安装基板X方向的对称平面对称。

其中:V1为当前迭代步总体积,V2为初始非设计区域的体积,V0为初始设计区域体积。优化过程的体积分数下限由设计经验确定,该优化过程设为40%;随机输入采用1/4量级的验收级随机加速度激励,RMS值为2 g。验收级随机加速度激励条件如表1所示。

表1 验收级随机加速度激励条件Table 1The acceptance-level input of the random vibration test
3.4 优化结果
在满足约束方程的前提下,经71次迭代后模型收敛。当前实体属性值设定为0.65时,拓扑优化设计结果如图3所示。该主支撑结构的拓扑设计结果符合设计目标要求,且具有较高的设计参考价值。以拓扑设计为基础,结合高效率桁架式结构的基本特征,兼顾结构的加工难度以及加工成本,得到了结构尺寸优化初始有限元模型如图4所示。进行主支撑结构的尺寸优化,并圆整桁架杆的内外径尺寸,得到了最终的主支撑结构如图5所示。
3.5 主支撑结构的有限元分析
为了验证主支撑结构的主要力学性能是否满足设计要求,建立主支撑结构的有限元模型如图6所示,采用NASTRAN软件进行该主支撑结构的动力学分析。主支撑结构有限元分析结果如表2所示,随机加速度激励下次镜特征点的响应曲线如图7所示。
该离轴三反空间相机主支撑结构质量约为3.8 kg,有限元分析表明其一阶频率为281.1 Hz,次镜沿光
轴方向的随机响应放大率约为2.2,满足设计要求。必须说明的是:结构优化设计过程是适当放宽对某些指标要求,寻找主要结构特性最优的设计过程。该系统次镜在X、Y向受到的随机载荷远小于光轴(Z向)方向,因而对X、Y向随机响应放大率的要求也远没有光轴方向严格。X向、Y向在1/4量级验收级随机加速度激励下次镜的随机响应放大率可以接受。有限元分析证明了随机响应最小化拓扑优化设计方法可以在满足其他力学性能要求的前提下将系统的随机响应控制在较低水平。
图3 拓扑优化设计结果Fig.3The result of topology optimization design

图5 最终的主支撑结构Fig.5The final supporting structure

图6 主支撑结构的有限元分析模型Fig.6The finite element model for the final supporting structure

图7 X,Y,Z向随机激励下次镜的PSD分析曲线Fig.7The analysis PSD curve of the secondary mirror under the influence of the random vibration test in X,Y,Z direction
4 试验验证
在装调完成的主支撑结构上安装配重块,以相机的调焦系统安装接口为约束点,选取主镜、次镜、三镜和折叠镜配重块上的特征点为传感器安装点,对该结构分别进行X、Y、Z向的0.1g量级正弦扫描试验和1/4量级的验收级随机加速度试验,图8为主支撑结构的振动试验现场,随机激励下次镜特征点的响应曲线如图9所示,动力学试验与有限元分析结果对比如表3、表4所示。
试验曲线与有限元分析曲线比较吻合,大部分设计指标的误差在10%以内,个别数据误差在10%~20%之间,误差产生的主要原因在于:
1)有限元模型对结构间连接方式的简化产生误差。该主支撑结构有限元模型建立过程用刚性连接模拟复合材料桁架杆与杆接头间的胶接连接,会对分析结果产生较大影响。
2)有限元模型输入条件与实际试验输入条件间的偏差会带来误差。
3)为了建模方便,对结构适当的简化,如去倒角及对各向异性的碳纤维复合材料采用简化的处理方式等都会导致计算模型与实际结构间存在偏差,进而带入分析误差。
有限元分析结果和动力学试验结果间的误差在可以接受的范围之内,满足工程要求。证明了该优化设计方法的正确性及该主支撑结构的合理性。

图8 主支撑结构的振动试验现场Fig.8Testing site of the supporting structure

图9 加速度响应的功率谱密度(PSD)试验结果Fig.9The test PSD curve of acceleration response

表3 正弦扫描试验与有限元分析结果对比Table 3The comparison of the result of the infinite analysis and the result of the sinusoidal scan test

表4 随机加速度试验与有限元分析结果对比Table 4The comparison of the result of the infinite analysis and the result of the random test
5 结论
本文将随机响应最小化拓扑优化设计方法引入到某轻小型离轴三反空间相机桁架式主支撑结构设计中。首先,根据该离轴三反相机的光机结构特点和技术要求,优选了碳纤维桁架杆结合钛合金安装基板的
主支撑结构形式,并确定了次镜组件和折叠镜组件各自通过桁架杆与主三镜安装基板连接的支撑方式。其次,给出了适用于工程应用的拓扑优化设计目标、约束及约束值,实现了相机主支撑结构桁架杆的拓扑优化设计。以拓扑优化设计结果为基础,进一步优化其他结构参数,进而得到了该空间相机的主支撑结构。最后,对该结构进行有限元分析和验证试验,表明所研制的焦距为890 mm的轻小型离轴三反相机桁架式主支撑结构一阶频率为291.4 Hz,质量仅为3.8 kg。Z向2 g RMS随机激励下次镜响应的RMS值仅为5.08 g。该桁架式主支撑结构已经应用于某轻小型离轴三反空间相机中。
[1]张科科,阮宁娟,傅丹鹰.国外空间用三反离轴相机发展分析与思考[J].航天返回与遥感,2008,29(3):63-70. ZHANG Keke,RUAN Ningjuan,FU Danying.Analysis and consideration of development of overseas space off-axis TMA system camera[J].Spacecraft Recovery&Remote Sensing,2008,29(3):63-70.
[2]张雷,贾学志.大型离轴三反相机桁架式主支撑结构的设计与优化[J].光学精密工程,2009,17(3):603-608. ZHANG Lei,JIA Xuezhi.Design and optimization of trussed supporting structure for off-axis three-mirror reflective space camera[J].Optics and Precision Engineering,2009,17(3):603-608.
[3]关英俊,徐宏,李志来,等.大型离轴空间相机桁架支撑结构的设计[J].光电工程,2014,41(12):7-13. GUAN Yingjun,XU Hong,LI Zhilai,et al.Design of Truss Support Structure for Large Off-aixs Space Camera[J]. Opto-Electronic Engineering,2014,41(12):7-13.
[4]郭疆,邵明东,王国良,等.空间遥感相机碳纤维机身结构设计[J].光学精密工程,2012,20(3):571-578. GUO Jiang,SHAO Mingdong,WANG Guoliang,et al.Design of optical-mechanical structure made of CFC in space remote sensing camera[J].Optics and Precision Engineering,2012,20(3):571-578.
[5]师汉民.机械振动系统-分析·建模·测试·对策[M].武汉:华中科技大学出版,2004:150-151. SHI Hanmin.Vibration Systems:Analysis,Modeling,Testing,Controlling[M].Wuhan:Huazhong University of Science and Technology Press,2004:150-151.
[6]邹艳,吴清文,董得义,等.空间相机支杆组件的随机振动分析与试验研究[J].系统仿真学报,2009,21(16):5009-5017. ZOU Yan,WU Qingwen,DONG Deyi,et al.Research on Analysis and Test of Random Vibration on Tripodic Supporting Structure of Space Camera[J].Journal of System Simulation,2009,21(16):5009-5017.
[7]CHEN Gaowei,MA Jianjun,LEI Juandu,et al.Dynamic response analysis of linear stochastic truss structures under stationary random excitation[J].Journal of Sound and Vibration(S0022-460X),2005,281(1/2):311-321.
[8]MAZhengdong,Kikuchi Noboru,CHENG Hsienchie.Topological design for vibrating Structures[J].Computer Methods in Applied Mechanics and Engineering(S0045-7825),1995,121(1/4):259-280.
[9]苏胜伟.基于Optistruct拓扑优化的应用研究[D].哈尔滨:哈尔滨工业大学,2008:29-31. SU Shengwei.Application and Research of Topology Optimization with Optistruct[D].Harbin:Harbin Engineering University,2008:29-31.
[10]辛宏伟,杨近松,高明辉,等.高分辨力空间遥感器次镜支撑设计[J].红外与激光工程,2011,40(9):1724-1729. XIN Hongwei,YANG Jinsong,GAO Minghui,et al.Support design for secondary mirror of high resolution space telescope[J]. Infrared and Laser Engineering,2011,40(9):1724-1729.
[11]袁野,李志来.长焦距遥感相机桁架结构稳定性研究[J].光电工程,2013,40(12):54-58. YUAN Ye,LI Zhilai.Frame Structure Stability of the Long Focal Length Optical Remote Sensor[J].Opto-Electronic Engineering,2013,40(12):54-58.
[12]林再文,刘永琪,梁岩.碳纤维增强复合材料在空间光学结构中的应用[J].光学精密工程,2007,15(8):1182-1185. LIN Zaiwen,LIU Yongqi,LIANG Yan.Application of carbon fiber reinforced composite to space optical structure[J].Optcis and Precision Engineering,2007,15(8):1182-1185.
Optimization Design and Test of the Supporting Structure for the Off-axis Three-mirror Reflective Space Camera
XI Jiali1,2,ZHANG Lei1,XIE Peng1,WEI Lei1,2,KONG Lin1
(1.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences, Changchun130033,China; 2.University of Chinese Academy of Sciences,Beijing100049,China)
A kind of method of topology optimization design for the supporting structure was presented,which aimed at decreasing the acceleration response RMS value of the space cameras.Firstly,after analyzing the common various forms of the space camera supporting structure,a supporting pattern with the secondary mirror and the folding mirror fixed separately was determined according to the characteristics of this optical system.Secondly,a trussed supporting structure met the requirements on the acceleration response was designed,which directed by objective function of acceleration response RMS and in the meanwhile restricted by the volume fraction,the displacements of the secondary mirror with the influence of axial gravity and the first-order frequency of the supporting structure.Finally,the finite element analysis and vibration experiments show that the supporting structure could satisfy the requirements on the whole mechanics performance index of this camera.The fundamental frequency reaches 291.4 Hz,and the acceleration response RMS value is 5.08 g with 2 g RMS random load under the condition that the mass of this trussed supporting structure is not more than 4 kg.The design scheme of this trussed supporting structure could provide some reference to the other light-small space camera with the same type.
the supporting structure;the topology optimization design;random response;off-axis three-mirror reflective space camera;truss
V474.2
A
10.3969/j.issn.1003-501X.2016.07.008
9
1003-501X(2016)07-0045-07
2015-07-13;
2016-01-18
国家863高技术项目(2012AA121502)
席佳利(1990-),男(汉族),陕西铜川人。硕士研究生,主要进行空间相机结构设计方面的研究。E-mail:jlxi_ciomp@163.com。
张雷(1982-),男(汉族),山东菏泽人。副研究员,主要从事空间遥感器的结构设计及分析方面的研究。
E-mail:zhangleisong@tom.com。
