中段弹头IMM-EKF跟踪方法及性能分析
2016-12-14熊智敏王党卫马晓岩
熊智敏,王党卫,马晓岩
(空军预警学院 三系,武汉 430019)
中段弹头IMM-EKF跟踪方法及性能分析
熊智敏,王党卫,马晓岩
(空军预警学院 三系,武汉 430019)
为了提高中段弹头跟踪收敛速度以及跟踪精度,提出了一种基于交互多模型(IMM)的扩展卡尔曼滤波(Extended Kalman Filter,EKF)的跟踪算法。基于中段弹头加速度变化特点,建立了目标的中段系统动力学模型及量测模型,通过引入速度测量值,使用IMM-EKF算法对中段目标进行跟踪。仿真结果表明,通过交互多模的非线性滤波算法,可以使中段跟踪收敛速度大为加快,速度测量值的引入也使得跟踪精度有所提高,并在弹头中段与再入段衔接处有较好的跟踪性能;验证了IMM-EKF跟踪中段弹头的有效性。
中段弹头跟踪;交互多模型;扩展卡尔曼滤波
弹道导弹预警探测是关乎国家战略安全的重要课题,对其精确跟踪是当前雷达技术领域的一个热点和难点。在弹道导弹发射到最终着地过程中中段飞行是雷达探测该类目标最为有利的跟踪阶段,导弹中段运动在导弹整个运动过程中飞行时间最长,仅受地球引力的作用,没有空气阻力和其他摄动力,弹头从弹体分离后常呈现加速飞行的特点,目标运动状态和雷达量测状态均非线性变化。同时,近年来,变轨技术的不断成熟,导弹中段飞行时也可进行机动,加速度会产生明显的变化,这使得弹头的运动轨迹更为复杂,利用雷达对其精确跟踪更为困难。
雷达对中段弹头的跟踪是一个连续的非线性滤波过程,目前雷达对这类目标常用的跟踪算法主要有量测流线型迭代的EKF、解耦的Kalman滤波器、α-β滤波器、混合α-β滤波器、耦合的Kalman滤波器以及自适应Kalman滤波器等[1-4]。文献[1~2]通过使用分段常加速模型描述弹头的目标运动,并进而在笛卡尔坐标系下进行目标跟踪。由于跟踪滤波过程中使用单一目标运动模型,因此,难以实现弹头变加速度运动特性的精确描述,进而导致跟踪收敛、精度下降的问题。文献[3~4]则提出了通过状态的可变维滤波器实时估计和自适应Kalman滤波跟踪方法,但由于状态的可变维滤波器实时估计需要精确的弹道参数,因此,跟踪滤波的鲁棒性较差。为了更为精确地描述弹头运动状态,文献[5~8]采用了基于地球动力学系数J2的标准椭球地球重力模型,通过位置、速度函数可表示弹头的加速度的特性,进而使用Singer模型和“当前”统计模型(CS)模型来实现中段弹头的精确跟踪。然而,Singer模型仅适用于匀加速运动的描述,对变加速运动描述误差较大,而CS模型则与之相反,对变加速运动的描述更为精确,对匀加速的描述误差较大,因此,单独使用一种运动模型难以实现中段弹头的精确跟踪。
交互多模(interaction multiple model,IMM)算法是广义伪Bayes基础上提出的一种基于Markov转移概率的跟踪算法,通过多个目标运动模型的交互来提高复杂运动目标的跟踪精度。IMM算法的主要思想是基于当前各个模型与实际运动匹配程度,通过改变各模型自滤波值在最终滤波值中的比重,来提高不同运动状态的跟踪精度,因此,该算法为提高中段弹头的精确跟踪提供了可能。文献[9]提出了基于Singer模型和CS模型的IMM-UPF中段弹头跟踪滤波算法,同时在目标模型和跟踪算法2个方面进行交互,并获得了较高的跟踪精度。但需要指出的是,文献[9]提出的方法交互更为复杂,且对模型精确度的依赖程度更高。针对上述问题,为了提高中段弹头跟踪收敛速度以及减少误差,本文建立了标准椭球地球重力模型下弹头中段运动加速度数学模型和雷达球坐标系量测方程,并结合中段弹头的运动特点,通过引入速度测量值,提出了基于Singer模型和CS的IMM-EKF中段弹头跟踪滤波算法。类似于文献[9]已有算法,本文提出方法通过2种不同运动模型进行中段弹头的交互跟踪,实现了对存在变加速机动的中段弹头目标的准确跟踪,但与之不同,本文提出算法由于速度测量值的引入加快了跟踪滤波算法的收敛速度,使得滤波过程对初始值变化不敏感,算法更为稳健。
1 中段弹头运动及测量模型
1.1 运动模型
弹道导弹发射飞行一段时间后弹头从弹体分离并进入中段飞行阶段,在地球重力作用下呈加速飞行状态。由于雷达对弹头的跟踪作用距离较长,且地球实际为椭球形状,因此,通过在标准椭球地球重力模型中加入地球形状动力学系数,用来实现弹头运动模型的精确描述。为了使用椭球地球重力模型对中段弹头轨迹进行建模,建立图1所示的雷达站心坐标系(earth-fixed coordinate system)OeXeYeZe,是常用非惯性系,其中Oe为站心,OeXe和OeYe分别指向东和北,OeZe垂直于地面,也称为东北天坐标系(ENU),是常用非惯性系。假定雷达站地理精度为L,大地纬度为B,大地高程为H。P为目标弹头位置,r为弹头到站心距离向量,雷达站ENU下位置矢量rr=(xryrzr)T,地球半径Re=6 378 137m。

图1 雷达站心坐标系
设ρ为地心到雷达站距离矢量,ρ=(00Re+H)T,于是,可得到站心坐标系(ENU)下目标加速度模型[9]:
(1)
(2)
(3)
(4)
(5)
(6)

很明显,由式(6)可以看出,由于中段飞行过程中弹头运动轨迹是一个近似椭圆的部分弧段,且其加速度量随弹头位置的改变而变化,通过弹头加速度模型可看出其可表示为弹头空间坐标与速度的函数,即加速度是由速度与位置的非线性函数所决定,这表明弹头中段存在变加速运动可能。
1.2 量测模型
(7)
对式(7)进行离散化得到:
(8)

(9)
式中:I3×3为单位矩阵,O3×3为零矩阵。其中量测方程为非线性形式[10]:
Z(k)=h(Xk)+ω(k)=
(10)

(11)
(12)
(13)
因此,量测噪声协方差矩阵可以表示为
(14)

(15)
2 基于IMM-EKF算法目标跟踪
目标跟踪是一个典型的非线性滤波问题,目标运动模型准确度是决定滤波性能的关键因素。Singer模型是一种零均值、一阶时间相关的机动加速度运动模型,其将目标的机动看作为随机噪声驱动所造成的,且假设机动加速度服从一阶的时间相关过程,可描述匀加速运动的机动目标运动状态。另一方面,CS模型则假设目标加速度服从修正的瑞利分布,能更为精确描述目标发生机动变化的真实情形,实现高机动目标的精确跟踪。而按照前文所给出的中段弹头加速度模型,弹头加速度会随弹头空间位置变化而变化,其运动模型较为复杂,不同空间位置表现出不同的加速度特性,既包含了匀加速运动状态又包含了变加速度机动运动状态,因此,对其跟踪时采用单一运动模型不能完整表达弹头运动方程的特点,应采用不同的运动模型对不同运动状态进行描述。基于这一考虑,本文提出了基于Singer和CS模型的IMM-EKF中段弹头跟踪滤波算法。

(16)
此处,采用含速度测量误差[12]:
(17)

Y(k)=Fj(k)Y(k-1)+DaE(k)+ωj(k)
(18)
式中:j=1,2;ωj(k)为k时刻过程噪声,其是均值为零、协方差矩阵为Qj的离散时间白噪声序列;D为常数矩阵;aE(k)为离散加速度;Fj(k)为模型j的过程矩阵,可分别由Singer模型和CS模型来得到。
对于Singer模型而言,由于加速度a(k)的中段Singer模型对应的离散时间动态方程为
(19)

(20)
(21)
交互多模(IMM)算法[13,16]是广义伪Bayes基础上提出的一种基于Markov转移概率的跟踪算法,通过多个目标运动模型的交互来提高复杂运动目标的跟踪精度。IMM算法使用多个运动模型匹配目标真实运动模式,基于多个滤波器残差似然函数确定每个模型在滤波输出中的比重,通过加权求和的方式确定最终的滤波结果。其主要分为模型交互输入、多模型并行滤波、模型概率更新以及滤波输出4个步骤。
设Y0j(k-1/k-1)为k-1时刻模型j的滤波值,其滤波协方差为P0j(k-1/k-1),模型j在k-1时刻滤波值在最终滤波输出中的比重为μj(k-1),假设共有r个运动模型。则k时刻模型交互输入为
(22)

[Yi(k-1/k-1)-Y0j(k-1/k-1)]×
[Yi(k-1/k-1)-Y0j(k-1/k-1)]′}
(23)
然后进行模型概率的更新,设k时刻模型j的滤波残差为γj(k),其协方差为Sj(k),则k时刻模型j的可能性为
(24)

设Y(k/k),P(k/k)分别为k时刻交互式的输出,则有:
(25)
Y(k/k)][Yj(k/k)-Y(k/k)]′}
(26)
整个IMM算法利用这一递推过程完成,其算法流程如图2所示[13]。
IMM算法具有模块化的特点,对应不同应用环境可以采用线性和非线性的滤波算法。量测信息反映在滤波模型概率中,并利用模型概率的变化完成自适应调整。然而采用单模型跟踪在对非机动、轻微机动和机动较强相结合的目标跟踪时效果会差,收敛较慢。由于单模型对环境要求较高,IMM算法的引入能够使得跟踪算法在模型间快速切换,有更好的适应性,尤其在复杂运动的情况下,IMM算法的优越性更加突出。

图2 IMM流程图
3 仿真结果和分析
为了证实本文所提方法的有效性,设弹头中段初始时刻位置观测量为(-506 148m,-224 446m,56 195m),速度初始量为(1 773m/s,-61m/s,1 760m/s),并利用弹道导弹在中段的运动微分方程和Runge-Kutta积分法[14]生成0~400s时段的仿真弹道,图3(a)给出了弹头三维轨道曲线,图3(b)给出了弹头速度变化曲线,该弹头运动模式是变加速过程,其速度是先由快再到慢再到快的过程。
另一方面,设定观测雷达位于坐标原点,其测距误差均方差为σR=100m,测角误差均方差σθ=σφ=0.3mrad,跟踪数据率为10Hz。更进一步,通过给定的误差方差,基于高斯分布模型随机产生各观测时刻距离、方位角误差数据,并叠加于仿真弹道,生成雷达对弹头的测量数据。此外,为了对比分析本文提出方法的性能,分别采用EKF与IMM-EKF方法对雷达测量的弹头数据进行跟踪滤波,并选取均方误差值(RMSE)δ作为评价指标,其定义为

图3 仿真弹道曲线
图4(a)给出了基于Singer模型滤波均方误差值,图4(b)给出了提出的基于CS模型滤波均方误差值。

图4 单模型对弹头跟踪滤波距离均方差变化曲线
由于弹头中段运动的过程中加速度变化是连续的且最大加速度值有限,其机动属性不确定。Singer模型对于运动目标介于匀速及匀加速的运动状态跟踪效果较好。但从仿真结果可以看出,在进入再入段时,弹头速度突变,跟踪效果较差。但是利用CS模型基于当前速度的特点,其对弹头速度反映比较精确,针对进入再入段速度突变情况有较好的反应能力。
图5(a)给出了模拟的弹头理论轨迹(以下称为真实轨迹)和仿真的测量轨迹(以下称为量测轨迹),图5(b)给出了提出的IMM-EKF算法200次蒙特卡洛仿真滤波得到的滤波轨迹(以下称为滤波轨迹)和真实轨迹对比图。可以看出,经过提出算法滤波后,滤波轨迹较之量测轨迹误差明显减小,更接近于真实轨迹。为了更进一步证实提出的算法,图6(a)给出了传统EKF算法(基于匀速运动模型和定义的6维观测量进行滤波,该算法以下称为传统算法)对上述弹道数据200次蒙特卡洛滤波仿真距离均方误差曲线,图6(b)则给出了提出的IMM-EKF算法蒙特卡洛滤波仿真距离均方误差曲线。很明显,对比图6(a)和图6(b)结果可以看出,随着观测时段的增加,2种算法滤波获得的轨迹均方误差均逐渐减小,且提出的算法明显优于传统算法,这表现为收敛速度更快,且收敛时跟踪误差更小。

图5 轨迹比较
更进一步,为了测试引入速度测量值对跟踪性能的影响,在跟踪过程中不考虑速度测量值,即仅使用位置参数作为观测向量,使用提出的IMM-EKF算法对上述量测数据进行跟踪滤波,并与传统EKF算法的结果进行对比。图6给出了提出的IMM-EKF算法不考虑速度测量值时的滤波结果以及与传统EKF算法滤波结果进行对比。由图6仿真结果可以看出,随着观测时段的增加,算法滤波获得的轨迹均方误差均逐渐减小,且提出算法明显优于传统算法,这表现为收敛速度更快,且收敛时跟踪误差更小。提出的IMM-EKF算法不考虑速度测量值时同样能保持较高的跟踪精度,但较之考虑速度测量值时收敛速度变慢,这表明本文引入速度测量值能加快滤波收敛速度。引入速度测量值要比不引入速度测量值时的均方根误差小,且收敛速度快,这是由于速度观测值提供了有关目标运动的更进一步信息,从而使跟踪性能得到改善。

图6 考虑和不考虑速度测量值时3种算法跟踪滤波距离均方差变化曲线
另一方面,为了测试观测向量初始状态对提出算法的性能影响,在生成的弹头数据初始值中加入距离和速度测量附加误差,并设定附加距离误差均方差σR=150m,附加测速误差方差σv=0.436m/s。随后,利用设定的附加误差均方差,通过高斯分布模型分别随机产生附加测量误差,分别叠加于前文仿真产生的0时刻轨道数据,并使用提出的IMM-EKF算法和传统算法进行跟踪滤波,2种算法滤波跟踪滤波结果如图7所示。
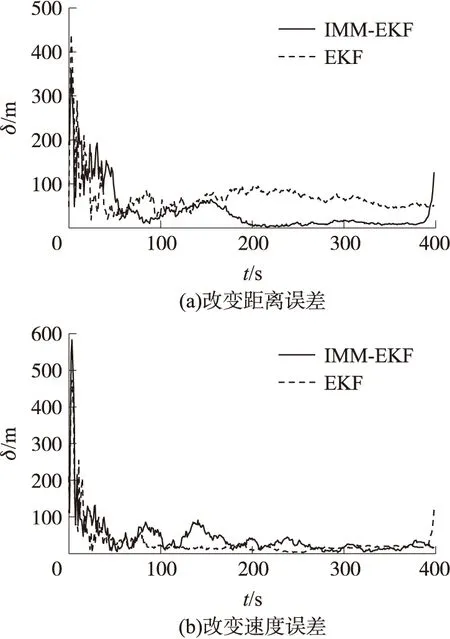
图7 改变距离与速度误差时2种算法跟踪滤波均方误差曲线
从仿真结果来看,在弹道初始距离与速度值的测量中增加附加误差后,传统EKF算法跟踪收敛速度变慢,且跟踪末端存在发散现象。而与此不同,本文提出的IMM-EKF算法在该情况下收敛速度仍然较快,且在跟踪末端时刻未出现发散问题,这说明提出的IMM-EKF算法对观测向量初始值的改变更不敏感,具有更强的鲁棒性。
4 结束语
针对中段弹头跟踪问题,本文基于弹头中段飞行时加速度变化特点,通过引入速度测量值,提出了一种IMM-EKF跟踪滤波算法,通过CS模型与Singer模型的相交互,应用扩展卡尔曼滤波实现对中段弹头的可靠跟踪。研究表明,观测向量中速度测量值的引入有效加快了跟踪算法的收敛速度,而通过2个模型的交互,可提高跟踪精度,且增强了跟踪过程的鲁棒性。此外,需要指出的是,本文采用的交互模型个数和模式有限,仅对2种模型进行交互,在现有跟踪技术基础上进行了跟踪仿真实验,对于更复杂的机动弹道,现有跟踪算法的适用性还有待研究。
[1] 谢鑫,李为民,周晓光,等.基于EKF算法的弹道导弹助推段跟踪建模与仿真[J].现代防御技术,2011,39(5):146-151. XIE Xin,LI Wei-min,ZHOU Xiao-guang,et al.Modeling and simulation of the ballistic missile boost phase tracking based on EKF[J].Modern Defence Technology,2011,39(5):146-151.(in Chinese)
[2]WU C L,HAN C Z,SUN Z G.A new nonlinear filtering method for ballistic target tracking[C]//12th International Conference on Information Fusion.Seattle,USA:IEEE,2009:2 062-206 7.
[3]HARTIKAINEN F.Optimal filtering with Kalman filters and smoothers[M].Espoo:Aalto University School of Snienne,2011.
[4]HU Yan-an,CHEN Da-qing,GAN You-yi.A study on system error characteristics and separation method for monopulse radar[J].Modern Radar,2010,32(5):39-43.
[5]KIM S H,CHOI H L.An IMM-based method for reentry-phase tracking of unknown ballistic missile[C]//13th International Conference on Control,Automation,and System.Korea:ICCAS,2013:751-754.
[6]XIU Guan,WANG Liang-ming,YANG Rong-jun.Construction and simulation of linear trajectory model[J].Journal of Naval University of Engineering,2010,22(2):84-91.
[7]练学辉,闫龙,乔大雷.基于当前统计模型的交互融合跟踪算法[J].雷达与对抗,2015,35(2):29-32. LIAN Xue-hui,YAN Long,QIAO Da-lei.A combined interactive tracking algorithm based on current statistical model[J].Radar and ECM,2015,35(2):29-32.(in Chinese)
[8]YAN Peng,JIN Hong-bin.A maneuvering target tracking algorithm based on UKF-singer[C]//7th International Conference on Simulation and Scientific Computing.China:IEEE,2008:924-926.
[9]郭跃,刘新学,王才红.混合坐标系下跟踪自由段弹道导弹的IMM-UPF算法研究[J].弹道学报,2015,27(1):12-17. GUO Yue,LIU Xin-xue,WANG Cai-hong.A study on IMM-UPF of tracking ballistic missile at free-flight phase in mixed coordinate syestem[J].Journal of Ballistics,2015,27(1):12-17.(in Chinese)
[10]赵艳丽.弹道目标雷达跟踪及技术研究[D].长沙:国防科学技术大学,2007:54-60. ZHAO Yan-li.Study on radar tracking and discrimination for ballistic missiles[D].Changsha:National University of Defense Technology,2007:54-60.(in Chinese)
[11]张泓,万自明,袁起.弹道系数估计误差与雷达测量精度的关系[J].现代防御技术,2007,35(6):97-101. ZHANG Hong,WAN Zi-ming,YUAN Qi.Relation between the ballistic coefficient estimate error and the measurement precision of radar[J].Modern Defence Technology,2007,35(6):97-101.(in Chinese)
[12]张光义.雷达测量数据精度评估方法研究[J].测试技术学报,2015,29(1):36-40. ZHANG Guang-yi.Research on accuracy evaluate method of radar testing data[J].Journal of Test and Measurement Technology,2015,29(1):36-40.(in Chinese)
[13]钮俊清,单奇,任清安,等.跟踪弹道导弹全阶段的可变多模型方法[J].雷达科学与技术,2011,9(3):224-231. NIU Jun-qing,SHAN Qi,REN Qing-an,et al.A new algorithm with variable structure multiple model for tracking ballistic missile at entire flight stages[J].Radar Science and Technology,2011,9(3):224-231.(in Chinese)
[14]宗志伟,饶彬.一种基于Runge-Kutta积分的UKF跟踪算法[J].雷达科学与技术,2010,8(4):353-356. ZONG Zhi-wei,RAO Bin.A UKF tracking method based on Runge-Kutta integration[J].Radar Science and Technology,2010,8(4):353-356.(in Chinese)
[15]封普文,黄长强,曹林平.基于自适应马尔可夫参数交互多模型算法的弹道导弹跟踪研究[J].兵工学报,2014,35(12):2 041-2 049. FENG Pu-wen,HUANG Chang-qiang,CAO Lin-ping.Research on ballistic missile tracking based on adaptive markov parameter IMM[J].Acta Armamentarii,2014,35(12):2 041-2 049.(in Chinese)
Tracking Midcourse Target and Error Analysis
XIONG Zhi-min,WANG Dang-wei,MA Xiao-yan
(The Third Department,Air Force Early Warning Academy,Wuhan 430019,China)
In order to improve the convergence rate and precision of midcourse target tracking,an algorithm based on IMM(Interaction Multiple Model)-EKF(Extended Kalman Filter) was proposed.Based on the variation characteristic of acceleration of midcourse target,three-dimensional target-motion-model and measurements model were built by using velocity measured-value.A comparative analysis between IMM-EKF and traditional EKF was carried out.The simulation results show that IMM-EKF algorithm can improve the convergence rate of midcourse target tracking,and the tracking precision can also be improved by using velocity measured-value.The proposed filtering method has better tracking performance in midocurse,and it is effective.
midcourse target tracking;interaction multiple model;extended Kalman filter
2016-06-21
国家自然科学基金项目(61179015;61401503)
熊智敏(1992- ),女,硕士研究生,研究方向为弹道导弹建模与跟踪算法。E-mail:397862505@qq.com。
TN957
A
1004-499X(2016)04-0017-07
