AWACS/UAV协同目标识别技术研究
2016-12-13郭卫东张永利周荣坤
郭卫东,张永利,周荣坤,马 磊
(中国电子科技集团公司电子科学研究院,北京100041)
AWACS/UAV协同目标识别技术研究
郭卫东,张永利,周荣坤,马 磊
(中国电子科技集团公司电子科学研究院,北京100041)
有人机/无人机协同作战可以极大提高作战效能。提出了基于D-S证据理论进行目标识别的机载预警与控制系统(AWACS)/无人机(UAV)协同作战样式。仿真结果表明,AWACS/UAV协同目标识别可以提高识别率,为目标定位、瞄准、精确打击提供有力依据。
机载预警与控制系统;无人机;D-S证据理论;目标识别
0 引 言
无人机作为新兴的空中作战力量,可执行对地、对海乃至对空作战任务,并具有可回收、可重复使用等特点。无人机具有零伤亡、持续作战能力强、全寿命周期成本低,以及在尺寸和机动性等方面的特有优势,能够替代有人机执行枯燥、恶劣、危险、纵深等任务。但是由于无人机智能水平的限制,要完成复杂战场环境下的精确打击、侦察等任务,对其自动化水平和完备程度提出了很高的要求。有人机/无人机协同作战,可以利用2类平台特有优势,生成多种新的作战样式,增强对快速、固定或慢速目标的实时、精确的探测能力,提升攻击范围和持续作战能力,以及本平台有效的防御能力;显著提高作战资源利用率、任务成功率、平台生存性,并缩短观察、判断、决策、行动(OODA)环路,提升协同作战系统的效费比,显著提高整体的作战效能。
美、英、俄等国从20世纪末就竞相开展有人机/无人机协同研究计划,已通过实验室作战概念及效能仿真、有人机/无人机协同试飞验证、大规模有人机/无人机系统集成能力演习等方式,探索有人空中平台对无人机进行协同控制的可行性、有效性和实用性。其中美国海军从20世纪90年代初开始研制战术控制系统(TCS)系统,分别于2003年和2011年验证了P-3C/RQ-8、MH-60/RQ-8间有人机/无人机协同作战能力。2011年,美国海军在P-8A上集成安装了对BAMS无人机协同控制的实际装备;2013年在滨海战斗舰上部署首支MH-60R/ MQ-8B有人无人协同直升机编队;2014年在罗斯福航母上验证2架F/A-18与1架X-47B的混合起降配合能力,并提出了新一代隐身轰炸机(代号“2018轰炸机”)与X-47B的隐身协同作战能力。此外,2012年美国海军在前期研究基础上,提出了通用化无人机控制系统(CCS)概念和软件架构,可实现海军有人平台对多种无人机的通用化控制[1]。国外有人机/无人机协同项目汇总如表1所示。

表1 国外有人机/无人机协同项目汇总
1 预警机/无人机协同目标识别
有人/无人机协同目标识别作战模式是针对战场作战环境复杂、作战目标多的特点,不同信息源得到的证据通常是不确定、不完全甚至可能是高度冲突的。利用多传感器信息融合技术对目标进行综合识别,识别率相比单传感器有明显提高。我方或友方雷达、预警机、天基预警卫星等传感器系统持续监测战场环境,各传感器通过各种光学、电子器件提取相应的战场环境数据和典型特征信息,进行传感器内部的分类识别,将结果输入到平台级数据融合中心进行融合,进而将融合结果输入到预警/指挥中心。有人/无人机协同作战过程中,各参与协同的作战平台由于所带传感器的类型、能力不同,对同一个目标进行识别时,会产生不同的目标属性,得到不同的识别结论。在这种情况下,各协同平台获取的目标属性信息产生冲突,无法对目标进行正确的综合识别。预警/指挥中心通过协同平台交互目标属性信息,将各平台级的信息进行决策融合,最终达到一致的综合识别结果,提升识别概率。
有人/无人机协同海上目标识别,通过预警机和无人机互相协同,在预警机的指挥引导下,由多架无人机进行协同探测。无人机协同情报处理系统将无人机光电/合成孔径雷达(SAR)传感器获取的数据通过压缩算法后,以一定频率通过数据链发送到预警机协同情报处理系统,对无人机的光电/SAR图像进行自动处理,并与预警机的雷达数据进行多源数据融合,实现对海上目标的综合识别。
1.1 预警机目标识别
预警机负责对目标进行大范围搜索和跟踪,生成广域战场态势,进行识别库管理,对多平台目标识别信息进行综合处理,对目标进行综合识别,辅助对目标进行判定及属性标注。
格里芬公司为美国空军E-3机载预警和控制系统(AWACS)飞机提供AN/UPX-40敌我识别(IFF)询问器,可使预警机以前所未有的空中监视能力支持综合指挥和控制作战管理,其实时空中监控画面可在联合军事行动中识别友好、中立和敌对活动,管理战区部队的作战行动,执行全海拔和全天候监视和预警任务[2]。
鹰眼E-2D预警机的电子支持设备是洛马公司的AN /ALQ2217A电子支持系统;还采用了BAE系统公司的Mode 1、2、3/A和4 敌我识别( IFF)应答机,这种应答机可以提高美国海军战场数据网络化能力。为向整个航母编队提供有关导弹监视与跟踪信息, E-2D预警机加装了红外搜索与跟踪监视系统(SIRST)。SIRST系统的红外传感器不仅安装在E-2D上,还将有一个传感器安装在航母舰队中。
E-2D预警机扩展防空任务的一个关键是协同作战能力,通过数据链将来自各种平台的雷达跟踪测量数据融合为一幅高质量、实时合成的跟踪图像,实时地参与到军舰和飞机的信息网络中。例如,E-2D接收到舰载系统发送的初始通信数据后,机上的协同作战能力(CEC)系统检验这些数据,对飞机进行识别,同时跟踪同一目标,增加其监测的相关雷达数据后,再次将所有的信息发送回军舰。这一过程允许网络内的所有作战平台在其传感器的监视容量内同时看到完整的空中图像,并能协同应对各种威胁[3-4]。
1.2 无人机目标身份识别
无人机具有续航时间长、飞行高度高、不易被对方发现与攻击的特点。机上可搭载电视摄像机、光电/红外/紫外/前视红外传感器、激光指示器、合成孔径雷达等多种传感器,对可能发生武装冲突、局部战争的海域进行长时间的实时侦察、监视。一旦发生冲突和战争,便可实施多批量、大纵深、全天候、立体化的全向侦察,搜集敌方的作战情报,及时传送到己方舰载或岸基指挥控制中心。现代无人机除要求具有侦察、探测等基本功能外,还要求具有大机动、高敏捷性、自主式飞行以及多机协同飞行和作战能力。当我机遭遇敌机机群攻击时,为了达到保存我机、击毁敌机的目的,采用多机协同飞行作战具有很好的效果。
Curtiss-Wright公司将为诺·格公司舰载海上监视无人机提供任务管理系统。英国《SHEP-HARD 集团网站》2010 年3 月24 日报道:Curtiss-Wright 公司今天宣布他们获得了诺斯罗普·格鲁曼公司的一份合同,为其舰载海上监视无人机系统(BAMS UAS) 提供先进任务管理系统(AMMS),这份合同总价约为2 500万美元,BAMS UAS 将为海军提供长航时海上情报、侦察和监视系统,为舰队提供保护,并对海上及沿岸目标进行探测、跟踪、分类和识别。
当前我海军无人机迎来了大发展时期,BZK-005无人机在2013某海空域查证识别任务中发挥了重要作用。无人机接受预警机指挥引导,对指定海域进行多手段探测,对发现的目标实施跟踪和持久监视,获取多模传感器和多视角目标图像,并将接收到的自动识别系统(AIS)信息传输给预警机用于多平台目标综合识别。
2 基本理论
2.1 证据理论基本概念——推广的置信函数
给定一个一般的识别框架θ,定义一个基本概率赋值函数m:DΘ→[0,1],与给定的证据源有关,即:
(1)
式中:m(A)为A的广义基本概率赋值函数(BPA),它的信任函数和似然函数分别为[5]:
(2)
(3)
式中:Bel(A)为A的所有子集的可能性度量之和;Pl(A)为所有与A相交的集合的基本概率赋值之和,且有Bel(A)≤Pl(A),Pl(A)-Bel(A)为对A不知道的信息。
2.2 D-S证据理论组合规则
设mi,i=1,2,…,n是同一识别框架2U上的n个相互独立的基本概率赋值,则其组合规则为[6-8]:
∀A⊂U,A≠Ø
(4)
(5)
3 预警机/无人机综合目标识别方法应用
3.1 预警机/无人机协同对同一个目标进行综合识别
假设有2个平台对辐射源进行探测,一个为无人机,将其所携带的合成孔径雷达(SAR)雷达获取的目标图像传输到预警机,处理后确定的基本概率赋值表示为m1,另一个为预警机所携带的电子侦察设备,其对目标的基本概率赋值表示为m2。若无人机所携带的SAR(m1)和预警机所携带的ESM同时反映目标A,其基本概率赋值见表2。
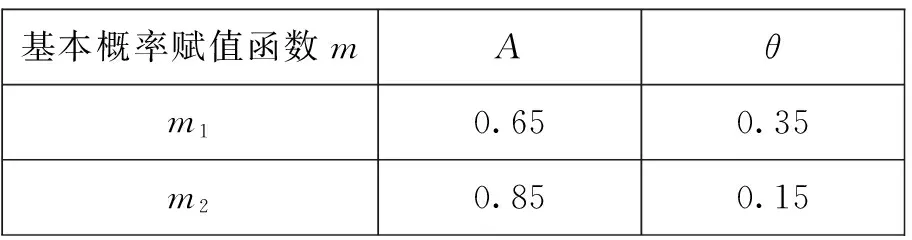
表2 基本概率赋值
表中,θ为不能确定的态势类。计算这2个证据源共同作用下产生的基本概率赋值,如表3所示。
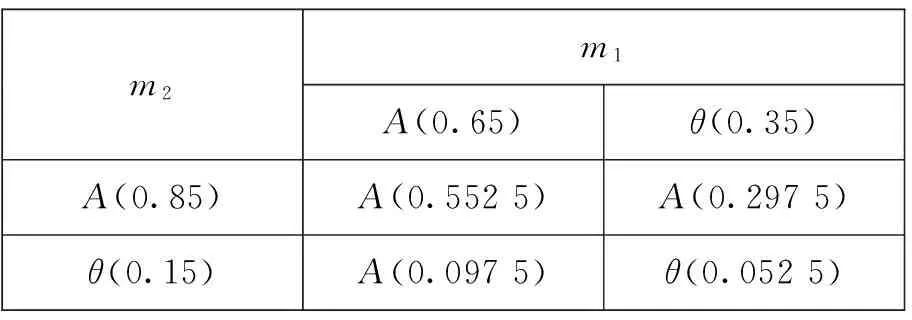
表3 数据融合过程
因此,m(A)=0.56+0.14+0.24=0.947 5,m(θ)=0.052 5。由结果可以看出,单纯由无人机对目标进行识别,识别概率仅为65%;由预警机对目标进行识别,识别率为85%;利用预警机/无人机对目标进行综合识别,则对目标的识别率提升到94.75%,如图1所示。

图1 双机多目标综合识别
3.2 传感器反映目标互斥
假设有2个平台对辐射源进行探测,一个为无人机1,将其所携带的SAR获取的目标图像传输到预警机,设处理后对目标A的识别概率为65%;另一个为预警机所携带的ESM,其对目标识别为B的概率为85%,则m1(A)=0.65,m1(θ)=0.35,m2(B)=0.85,m2(θ)=0.15,θ为不能确定的态势类。
计算这2个证据源共同作用下产生的基本概率赋值,如表4所示。
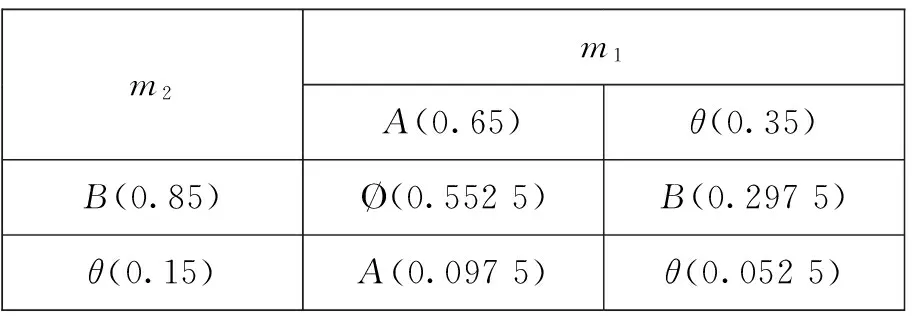
表4 融合过程
设证据冲突程度表示为k,k=0.605 0,则:
由结果可以看出,无人机1将目标识别为A的概率为65%;预警机对目标识别为B的概率为85%;利用预警机/无人机对目标进行综合识别,可得目标为B的识别率为66.48%,识别为A的概率为21.79%,判定结果为B,如图2所示。
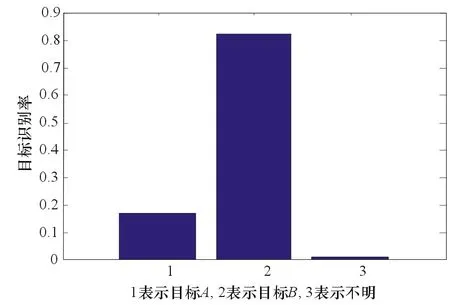
图2 预警机/无人机1对目标识别率
3.3 D-S证据理论传播算法
根据进一步测试的证据,每收到一则事件发生的上报信息,就进行一次基本概率的分配,再使用Dempster合成规则进行两两组合,得到新的基本概率分配,并把合成的结果送到决策逻辑进行判断,将具有最大置信度的命题作为备选命题。当不断有事件发生时,这个过程便得以继续,直到备选命题的置信度超过了一定的阈值,即认为该命题成立。D-S证据理论传播算法如图3所示。

图3 D-S证据理论传播算法
假设由预警机/无人机1/无人机2协同对2个目标进行综合识别。基于表4的数据基础,另有一架无人机2,其对目标识别概率如下:m3(A)=0.3,m3(B)=0.65,m3(θ)=0.05。目标A和目标B相互排斥。采用D-S证据理论组合规则进行信息融合,如表5所示。
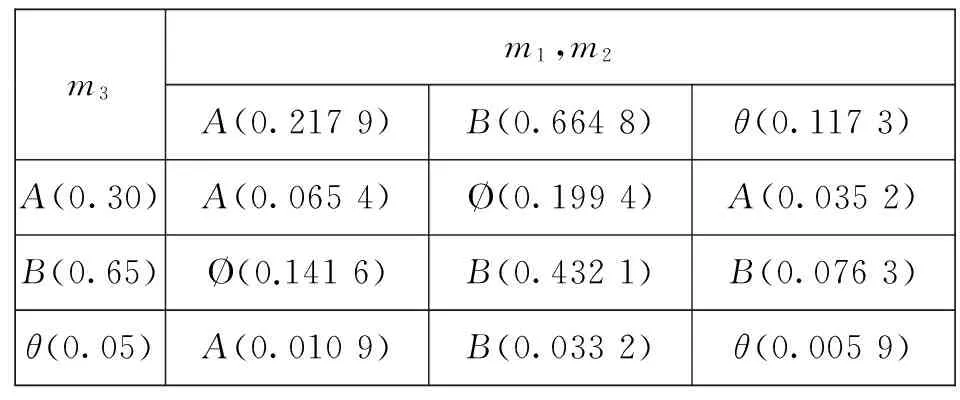
表5 融合过程

图4 预警机/无人机1、2协同对目标识别率
由图2、图4的仿真结果中可以看到,融合的平台越多,不确定性的基本概率越低;随着对各子系统证据的融合,目标B的可信度越来越高,即对目标B的支持度越来越高。将三机的证据都融合完成后,融合后的平台可能类型对应的基本概率赋值分
别为0.169 1和0.822 0,不确定的基本概率赋值降低为0.008 9,从而可以得到该待识别平台的融合识别判决结果是目标B。
从“综合识别效能分析”可以得出,基于无人机图像情报的目标识别概率为65%;预警机对目标识别率为85%的条件下,利用预警机/无人机对目标进行综合识别,则对目标的识别率提升到94.75%;在证据冲突条件下,双机识别概率为66.48%,三机识别概率提升到82.20%,优于基于无人机图像情报的目标识别概率。
4 结束语
预警机与无人机协同作战,利用预警机、无人机等多平台、多角度、多种类的探测与识别信息,改变原来各种目标识别设备按系统划分各自独立工作、无法协同和相互印证的现状,提高海面目标综合识别概率,为掌握辐射源目标动向和行动意图,及时准确决策提供情报依据。
[1] 王焱.有人/无人机协同作战[J].电讯技术,2013,53(9):1253-1258.
[2] 吴昊.国外预警机技术的发展分析[J].舰船电子工程,2014,34(1):23-27.
[3] 张鹏.E-2D预警机航空电子系统及其在未来网络中心战中的应用[J].电讯技术,2014,54(5):689-694.
[4] 张纯学.美国海军的鹰眼E-2D预警机[J].飞航导弹,2007(9):11-13.
[5] 何友,王国宏,关欣.信息融合理论及应用[M].北京:电子工业出版社,2010.
[6] 张永利,计文平,张靖.基于DSmT的不同时域多传感器目标识别方法研究[J].昆明理工大学学报,2013,38(5):106-110.
[7]SMARANDACHEF,DESERTJ.AdvancesandApplicationsofDSmTforInformationFusion[M].Rehoboth,America:AmericanResearchPress,2009:26- 29.
[8] 李洋,张靖,石教华,张晓丽.目标航迹融合质量度量方法研究[J].中国电子科学研究院学报,2015,13(5):254-259.
Research into AWACS/UAV Cooperative Target Identification Technologies
GUO Wei-dong,ZHANG Yong-li,ZHOU Rong-kun,MA Lei
(China Academy of Electronics and Information Technology,Beijing 100041,China)
Cooperative combat of manned/unmanned aerial vehicle (UAV) can greatly improve the operational effectiveness.This paper puts forward the cooperative combat mode of airborne warning and control system (AWACS) and UAV based on D-S evidence theory to perform the target identification.Simulation results show that AWACS/UAV cooperative target identification can improve recognition rate,offer reliable basis for target localization,aiming and accurate strike.
airborne warning and control system;unmanned aerial vehicle;D-S evidence theory; target identification
2016-04-01
D29
A
CN32-1413(2016)05-0009-05
10.16426/j.cnki.jcdzdk.2016.05.002
