不确定区域天线扫描目标捕获方法*
2016-12-09吴铁柱陈学军王青松刘亚兵
吴铁柱,陈学军,王青松,刘亚兵
(西安卫星测控中心,西安710043)
不确定区域天线扫描目标捕获方法*
吴铁柱**,陈学军,王青松,刘亚兵
(西安卫星测控中心,西安710043)
针对航天测控站天线快速扫描需求与天线机械结构动态性能较低之间的矛盾,设计了天线方位、俯仰角速度正弦变化条件下合成圆周扫描和螺旋扫描轨迹算法,提出了结合目标运动特性选择扫描方式的原则,举例说明了扫描参数计算方法。计算和仿真结果表明,利用所提方法可以将天线加速度控制在天线设计指标以内,目标捕获概率可控。该扫描参数计算方法已经部分应用于我国探月工程。
航天测控站;天线扫描;目标捕获;螺旋扫描;圆周扫描
1 引 言
在航天器返回地面过程中,有时其弹道预报存在较大误差,而且通过地面测控站可见弧段的时间很短,要求天线在一定空域内进行快速角度扫描。机械扫描方式下,天线动态性能(伺服带宽)[1-2]和角加速度性能对捕获成功概率影响较大[3]。若扫描模型设计不合理,实际扫描轨迹可能会出现滞后或超前现象,当扫描加速度大于天线设计指标时,还会对天线结构造成冲击,影响设备使用寿命。对于锐波束天线,若天线扫描轨迹线速度不相等,则波束扫过目标的时间是空间的函数,在各区域的捕获成功概率将会出现差异[4]。
常见的机械扫描方式主要包括线性扫描、螺旋矩形扫描[5]、螺旋扫描、光栅矩形扫描、圆周扫描、李萨如扫描等[3]。文献[3]对加速度影响扫描周期特点进行了研究,文献[4]在扫描速度对扫描捕获概率方面进行了仿真研究,文献[6]对螺旋扫描进行了恒线速度轨迹计算研究,文献[7]在单次扫描对捕获概率方面进行了研究。相对其他扫描方式,圆周扫描和螺旋扫描可以从高捕获概率中心开始扫描[8],且更易于天线平滑运行。
本文在上述文献研究成果的基础上,综合考虑扫描需求和天线结构的承受能力,结合航天返回器目标运动特性,设计了圆周扫描和螺旋扫描两种方式的扫描轨迹模型,给出了给定区域不漏捕算法。利用该模型扫描时天线方位、俯仰的角速度为正弦变化,可以实现对天线最大速度及加速度的计算和控制,在发挥天线动态性能基础上,有效减少对天线结构的机械冲击影响。该模型扫描轨迹线速度恒定,确保天线波束扫过目标时间恒定,可以实现目标捕获成功概率控制。
2 圆周扫描捕获
2.1 扫描轨迹和扫描时间分析
天线在某一不确定区域按圆周扫描方式实现目标捕获,如图1所示。天线首先在O点开始凝视,然后扫描运动轨迹从O点出发,沿x轴到A点,沿圆C1进行圆周逆时针扫描一周回到A点,沿椭圆E到B点,沿圆C2进行圆周逆时针扫描一周回到B点。至此,天线扫描两圈结束。为了使天线运动平稳,天线在方位、俯仰轴上扫描时,角度变化采用正弦形式。为了均匀扫描覆盖目标,波束沿圆周等线速度运动。下面以扫描两周为例,对各阶段运动轨迹的表达式进行描述。

图1 圆周扫描轨迹Fig.1 Circular scanning trajectory
(1)天线波束在O点凝视阶段

式中:x表示天线的方位角;y表示天线的俯仰角;t表示时间;τ表示凝视时间。一般要求τ大于环路锁定时间。
(2)天线波束从O点到A点阶段

式中:x、x 、y、y 分别表示天线的方位、俯仰角速度和角加速度;a1表示圆C1的半径;ω1表示O点到A点波束运动的角频率;T1=2π/ω1表示三角函数周期。一般要求x 、x 的绝对值小于天线可适应的角速度和角加速度。
(3)天线波束从A点沿C1旋转一周阶段

式中:ω2表示波束沿C1运动的角频率;T2=2π/ω2表示周期;V=a1ω2表示A点沿C1运动的线速度。一般要求V为恒速运动,可令ω1=ω2,保证波束每次扫过目标时间一致。设半功率波束的宽度为θ0.5,则要求天线波束扫描时覆盖目标的时间(θ0.5/V)大于环路锁定时间。
(4)天线波束从A点沿椭圆E到B点阶段

式中:a2表示圆C2的半径;ω3表示波束沿椭圆E到B点运动的角频率;T3=2π/ω3表示周期。
(5)天线波束从B点沿C2旋转一周阶段

式中:ω4表示波束沿C2运动的角频率;T4=2π/ω4表示周期;V=a2ω4表示波束沿C2运动的线速度,为保证线速度连续,可令ω4=ω3。
(6)圆周扫描时间
天线波束通过凝视、平移和圆周扫描的方式来覆盖要求的区域,其整个扫描时间T为

2.2 波束交叠覆盖范围和照射目标时间分析
圆周扫描天线波束覆盖范围如图2所示。图中O点为扫描区域中心凝视点,圆C1和圆C2为天线波束中心扫描轨迹,由虚线表示。图中3个实线圆分别代表位于O点和圆C1上A点、圆C2上B点的天线扫描波束。半功率波束宽度为θ0.5=2b。为了不丢失目标,波束间隔具有一定交叠覆盖,即角距OA或AB不大于2b,圆周扫描区域覆盖范围为

设两波束之间角距OA=d,则两波束覆盖交叠系数η为


图2 波束交叠覆盖范围Fig.2 Beam overlapping area
实际应用中,为保证足够的交叠空间,一般设置AB与b相等,则波束覆盖交叠弦长FG计算公式为

为了可靠捕获目标,则天线扫描时要求目标通过两天线波束交叠弦长时间(FG/V)大于地面接收机的载波捕获时间。
2.3 举例1

时,覆盖范围

捕获范围

波束覆盖交叠弦长

交叠系数

设凝视时间τ=1 s(大于环路锁定时间),则波束圆周扫描线速度V、波束扫描角频率ω、扫描周期Ti、天线最大扫描速度·x、天线最大扫描加速度·x·和扫描时间T为
新生代农民工流动性强,像候鸟一样飞来飞去,高失业率是一大明显特征,加之失地农民可持续生计问题面临挑战。然而,失业保险除了保障失业者在失业期间的基本生活之外,还可以促进失业者重新就业,以妥善解决失业者的可持续生计问题。因此,规范企业雇主职能,加强相关法律制度,实施用工“合同制”,赋予农民工“以农村土地换城市生计”的权利,有效解决“三农问题”,推进新型城镇化进程。
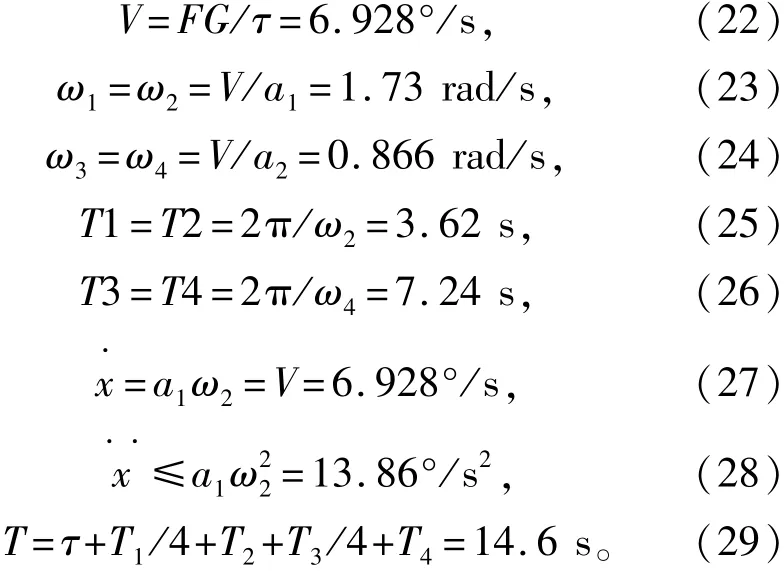
2.4 举例2
以某工程为例,为达到±9°的捕获范围,设OA= AB=d=a1=6°,b=4°,则扫描一周时,覆盖范围

捕获范围

波束覆盖交叠弦长

交叠系数
η=(2b-d)/(2b+d)=0.14。(33)
设凝视时间τ=1 s(大于环路锁定时间),则波束圆周扫描线速度V、波束扫描角频率ω、扫描周期
Ti、天线最大扫描速度、天线最大扫描加速度和扫描时间T为

3 螺旋扫描捕获
3.1 扫描轨迹和扫描时间分析
天线在某一区域按阿基米德螺线扫描捕获目标,如图3所示。其轨迹方程简单,曲线平滑,螺距相等,易于实现对扫描范围的全覆盖扫描。图中3个小圆代表天线波束扫描时的交叠覆盖情况。

图3 阿基米德螺线扫描及波束覆盖Fig.3 Beam coverage by Archimedean spiral scanning method
天线扫描采用阿基米德螺线形式,扫描轨迹可采用恒定角频率扫描,也可以恒定线速度扫描。为了使波束扫过目标的时间不因扫描圈数增加而改变,有利于目标信号的发现和捕获,采用恒定线速度扫描形式较好。天线方位轴和俯仰轴的合成运动可形成恒定线速度的运转方式,这样就可以保证天线运行平稳、快速扫完整个区域,不致于对天线结构造成过大冲击。阿基米德螺线的方程为
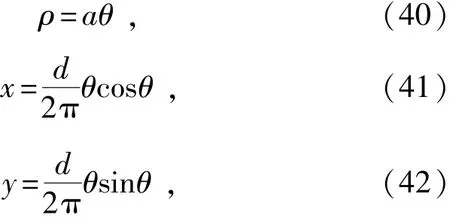

式中:ρ为极径;θ为极角,单位rad;a为比例系数; x、y为天线方位、俯仰角,单位(°);L为螺线长,单位(°);d=2πa为螺距,单位(°);V为螺线的线速度,单位(°/s);t为时间,单位s;T为天线在指定区域的扫描时间。天线方位俯仰扫描角速度x·、y·为
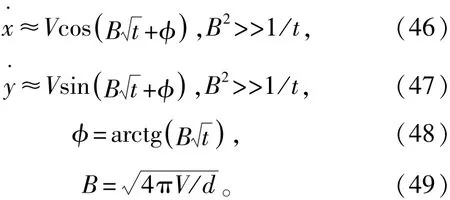
由上述计算式可知,天线方位轴、俯仰轴角速度变化是正弦形的,角速度正弦形变化的振幅变化很小,角速度正弦形变化的振幅近似等于扫描轨迹线速度V[6]。
3.2 波束交叠覆盖范围和照射目标时间分析
设天线半功率波束宽度为θ0.5=2b,当选择螺距d=b,扫描螺线第2圈波束截面与第3圈波束截面相交弦长c,由前面分析可知为c=1.732b。
3.3 举例
设天线波束半功率宽度 θ0.5=8°,螺距 d= θ0.5/2=4°,覆盖不确定区域的扫描范围x=y=±9°。考虑到波束宽度,只要螺线极径ρ为±5°时,就达到了±9°的覆盖范围。通过计算,极角θ扫描1.88圈,即θ从0变到3.76π时,极径ρ为±5°。为保证波束边缘区域的目标捕获,需要继续扫描一圈,即θ从0变到5.76π,满足±9°的捕获范围。

设环路锁定时间τ≤1 s,b=θ0.5/2=4°,则波束交叠弦长c、允许的扫描线速度V或天线的最大角速度x·max计算如下:

假设天线机械运动性能(角速度及角加速度)远大于扫描需求,即仿真结果不受天线动态滞后的影响,因此,只要天线最大速度及最大加速度仿真结果在天线设计指标内,就可以认为该算法满足实际需求。阿基米德螺线扫描方位(俯仰)速度仿真结果见图4。

图4 阿基米德螺线扫描方位速度仿真结果Fig.4 Azimuth velocity simulation of Archimedean spiral scanning
方位(俯仰)加速度仿真结果为幅度衰变的正弦曲线,最大值为1.19°/s2,如图5所示。

图5 阿基米德螺线扫描加速度仿真结果Fig.5 Acceleration simulation of Archimedean spiral scanning
设扫描线速度V取值6.928°/s,则扫描时间T计算如下:可见阿基米德螺线扫描加速度较小,对天线冲击也比较小。

4 工程应用
实际应用中,捕获概率是关注的重点,文献[7]给出了空间探测器单次扫描捕获概率计算模型。本文主要讨论在给定空域内实现全空域覆盖,保证只要目标落入该区域,不会出现漏捕现象。
从理论上讲,要实现固定空域的目标捕获,必须同时满足以下两个条件:一是天线波束扫过目标的时间Ts大于地面设备的载波捕获时间τ;二是目标穿越波束的时间Tc大于扫描周期T。
前述举例考虑交叠弦长FG和载波捕获时间τ对最大扫描速度的限制,即满足条件一的最大扫描速度为6.928°/s。为满足第二个条件,还要考虑目标的运行角速度。
假设目标运行角速度为0.5°/s,目标穿越波束的时间Tc=16 s,则前文中关于圆周扫描的两个举例中扫描周期均小于16 s,不会出现漏捕现象,但螺旋扫描举例扫描周期为17.4 s,不满足条件二,可能会出现漏捕现象。因此,实际应用中应综合考虑天线动态性能、波束宽度、目标特性等因素来确定扫描参数。同时,工程上扫描参数设计时还要保留一定的余量。
5 结束语
本文设计了天线方位、俯仰角速度正弦变化条件下合成圆周扫描和螺旋扫描轨迹的算法模型,分析了该模型下搜索捕获范围、扫描时间、目标照射时间、波束交叠覆盖范围、天线的最大角速度及角加速度等指标的相互制约关系。计算和仿真结果表明,利用该算法很好地解决了快速扫描过程中因加速度过大对天线造成的机械冲击问题,目标捕获成功概率可控,扫描方式选取原则明确,适用于锐波束天线对快速通过某扫描区域目标的拦截捕获,满足现有航天测控天线、雷达动态指标要求,可为返回式或近地轨道目标捕获提供参考依据。
本文对圆周扫描、阿基米德螺线扫描轨迹控制进行了研究,下一步考虑结合其他扫描方式进行研究,以适应不同领域的需求。
[1] 乔建江.天气雷达天线伺服控制系统研究[J].河北省科学院学报,2010(4):38-42. QIAO Jianjiang.The research on weather radar an tenna servo control system[J].Journal of the Hebei Academy of Sciences,2010(4):38-42.(in Chinese)
[2] 段勇军,顾吉丰.天线座系统动态性能与稳定性影响因素分析[J].现代雷达,2011(10):67-70. DUAN Yongjun,GU Jifeng.Analysis of factors influencing the dynamic performance and stability of pedestal systems [J].Modem Radar,2011(10):67-70.(in Chinese)
[3] 位寅生,杨思亮.单脉冲雷达扫描方式分析与仿真[J].系统工程与电子技术,2011,33(2):468-472. WEI Yinsheng,YANG Siliang.Analysis and simulation of monopluse radar scanning modes[J].Systems Engineering and Electronics,2011,33(2):468-472.(in Chinese)
[4] 张宇.地面天线目标捕获技术分析[J].电讯技术, 2016,56(4):448-452. ZHANG Yu.Analysis of target acquisition technology by ground antenna[J].Telecommunication Engineering, 2016,56(4):448-452.(in Chinese)
[5] 翟坤,李顺利,杨涤.用户星天线空间扫描策略[J].航空学报,2008(5):1308-1312. ZHAI Kun,LI Shunli,YANG Di.Space scanning strategies for user satellite's antenna[J].Acta Aeronautica et Astronautics Sinica,2008(5):1308-1312.(in Chinese)
[6] 黎孝纯,于瑞霞,闫剑虹.星间链路天线扫描捕获方法[J].空间电子技术,2008(4):5-10. LI Xiaochun,YU Ruixia,YAN Jianhong.Inter satellite link antenna scanning and capturing method[J].Space E-lectronic Technology,2008(4):5-10.(in Chinese)
[7] 汪亚夫,宋伟,邵立,等.空间探测器对空间运动目标探测概率的计算[J].电子信息对抗技术,2013(2):15-18. WANG Yafu,SONG Wei,SHAO Li,et al.Detecting probability calculation on moving space target of space detector[J].Electronic Warfare Technology,2013(2):15-18. (in Chinese)
[8] 李晓峰.星地激光通信链路原理与技术[M].北京:国防工业出版社,2007:232-233. LI Xiaofeng.Principle and technology of satellite ground laser communication link[M].Beijing:National Defense Industry Press,2007:232-233.(in Chinese)年控控Pf r ro o于中系mv i n西心统WN
吴co Ue北高;r铁, th i大级Tnw柱i ee1学工sz ( 9t h7 1 获程uU 9 1 7 .n w学师1 i Hv a—e e ,s士r主 s ) r bi学e , t ocy要r男e n位 iiv研n , e i , 陕nd1现究9 Wt西9 h为方5ee渭. i 西向nBHa南.e安为nS, 人. is卫航S hd , n星天ae 1 o ag 9 w nr 9测测ex 5 ea i senior engineer.His research concerns space TT&C system.
Email:770896962@qq.com
陈学军(1968—),男,湖南蓝山人,2012年于西北工业大学获硕士学位,现为西安卫星测控中心高级工程师,主要研究方向为航天测控系统;
CHEN Xuejun was born in Nanshan,Hunan Province,in 1968.He received the M.S.degree from Northwestern Polytechnic University in 2012.He is now a senior engineer.His research concerns space TT&C system.
Email:chenxuejun66@126.com
王青松(1971—),男,重庆丰都人,1995年于四川联合大学获学士学位,现为西安卫星测控中心高级工程师,主要研究方向为航天测控系统;
WANG Qingsong was born in Fengdu,Chongqing,in 1971. He received the B.S.degree from Sichuan United University in 1995.He is now a senior engineer.His research concerns space TT&C system.
Email:wwqs2005@sina.com
刘亚兵(1977—),男,陕西宝鸡人,1998年于解放军装备学院获学士学位,现为西安卫星测控中心工程师,主要研究方向为航天测控系统。
LIU Yabing was born in Baoji,Shaanxi Province,in 1977. He received the B.S.degree from PLA Academy of Equipment in 1998.He is now an engineer.His research concerns space TT&C system.
Email:lyb921@sina.com
简讯
《电讯技术》2015年度发行与传播情况
根据《中国学术期刊(光盘版)》电子杂志社有限公司发布的《“中国知网”<电讯技术>发行与传播统计报告》(报告编号M0542),在2015年度发行与传播统计中,《电讯技术》机构用户为3 917个,比上年度增加了128个,年增长率约3.4%。统计数据表明,自2007年以来,《电讯技术》机构用户增加了1 644个,年增长率保持稳定,充分说明其传播范围在不断扩大,影响力在逐年提升,编辑部工作成效显著。
本刊编辑部 赵 勇
Target Capturing by Antenna Scanning in Uncertain Areas
WU Tiezhu,CHEN Xuejun,WANG Qingsong,LIU Yabing
(Xi′an Satellite Control Center,Xi′an 710043,China)
To resolve the contradiction between the requirement for fast antenna scanning and relatively unsatisfactory dynamic performance of mechanical structure in space telemetry tracking and command (TT&C)stations,this paper designs a track algorithm of circular scanning and spiral scanning based on the sinusoidal variation of antenna azimuth and elevation angle velocity,proposes the principle of selecting scanning modes according to the motion characteristics of targets,and illustrates the calculation methods of scanning parameters with examples.The calculation and simulation results show that the methods mentioned are able to keep antenna acceleration within its design indexes and target acquisition probability controlable.The calculation methods of scanning parameters as mentioned have been partly applied in China′s Lunar Exploration Program.
space TT&C station;antenna scanning;target capturing;spiral scanning;circular scanning
**通信作者:770896962@qq.com 770896962@qq.com
TN953
A
1001-893X(2016)11-1223-06
10.3969/j.issn.1001-893x.2016.11.008
2016-02-24;
2016-06-06
date:2016-02-24;Revised date:2016-06-06
引用格式:吴铁柱,陈学军,王青松,等.不确定区域天线扫描目标捕获方法[J].电讯技术,2016,56(11):1223-1228.[WU Tiezhu,CHEN Xuejun,WANG Qingsong,et al.Target capturing by antenna scanning in uncertain areas[J].Telecommunication Engineering,2016,56(11):1223-1228.]