无位置传感器无刷直流电动机位置误差分析及补偿
2016-11-30潘积兰余建成刘二豪
潘积兰,余建成,刘二豪
(西北工业大学,西安 710129)
无位置传感器无刷直流电动机位置误差分析及补偿
潘积兰,余建成,刘二豪
(西北工业大学,西安 710129)
针对反电动势检测法的无位置传感器无刷直流电动机在位置误差影响下性能降低的问题,研究滤波电路对电机位置误差的影响,并利用电枢反应磁动势分布图来分析电枢反应对位置误差的影响。最后,提出一种换相点自校正控制方法来实时地补偿位置误差。实验结果表明,滤波电路使得位置信号相位延迟而电枢反应使得位置信号相位超前,并证明所提出的换相点自校正控制方法的有效性。
无刷直流电动机;无位置传感器;电枢反应;位置误差补偿
0 引 言
传统的基于位置传感器检测位置信号的永磁无刷直流电动机由于位置传感器安装精度和检测精度的限制,在实际制造和应用中存在诸多不便,从而使永磁无刷直流电动机无位置传感器的检测和控制问题成为国内外研究的重点及难点。在诸多转子位置间接检测方法[1-5]中,反电动势检测法由于结构简单、容易实现等优点,成为目前最为成熟、应用最为广泛的方法。
反电动势检测法利用永磁无刷直流电动机感应反电动势与电机换向逻辑之间的关系,通过对反电动势过零点的检测来生成转子的位置信号,以驱动电机运行。反电动势检测法由于电枢反应、低通滤波器电路和换相续流等因素造成位置信号误差,影响到电机性能。文献[6]分析了电枢反应对检测转子位置精度的影响,提出凸极电机的电枢反应影响反电势法所测转子位置的精度而隐极电机的检测位置精度与电枢反应无关;文献[7]分析了无刷直流电动机换相时刻电流续流对端电压波形的影响,并提出相位补偿算法来校正位置误差。无位置传感器无刷直流电动机控制中,以往有关文献较少深入讨论电枢反应和低通滤波器电路造成的误差分析。
对于检测转子位置以及补偿位置误差的研究也一直存在。如文献[8]在分析位置误差与非换流相相电流关系的基础上,提出一种换相点自校正方法;文献[9]提出一种新的检测反电动势过零点的方法,该方法能够避免低通滤波器的影响,但未详细描述电枢反应和换相续流等因素的影响;文献[10]采用中性点电压经PI调节对转子位置信号进行补偿,算法较为复杂;文献[11]提出以端电压偏差为反馈量的PI调节器来校正位置信号,该方法检测换相前后端电压难度大,实现较为困难;文献[12]以控制非导通相续流电流对称为目标,通过PI调节器及时调整过零点延时角度,非导通相续流电流为脉冲电流容易造成采样困难。
针对前人深入研究影响位置相位误差较少,本文在分析反电动势检测法的基础上深入分析滤波电路和电枢反应对位置相位误差的影响。其中,采用基于电枢反应磁动势分布图来分析电枢反应对气隙磁场的影响,得以直观地分析电枢反应对位置相位误差的影响。采用了一种换相点自校正控制方法来消除位置相位误差,通过对非换流相相电流偏差的PI闭环控制,实时地补偿换相点误差,获得准确的换相位置信号。
1 基于反电动势检测法滤波电路影响分析
永磁无刷直流电动机运行时,通过位置检测电路得到转子的位置信号,控制电路对转子位置信号进行处理,产生逻辑信号来驱动功率开关管的导通与关断,实现各绕组的正确换相。为了驱动电机正常运行,在一个电周期内每个功率开关管导通120°电角度,每经过60°电角度,开关管需要换相一次。在理想情况下,无刷直流电动机的反电动势为120°平顶宽度的梯形波,如图1所示,每相反电动势过零点延时30°后得到准确的换相点。图1中,Z1~Z6分别表示对应相的反电动势过零点;S1~S6表示对应相的换相点。

图1 反电动势过零点延迟30°换相原理图
对于反电动势过零点的检测,本文采用非导通相端电压的三倍与三相端电压之和进行比较得到该相反电动势过零点。电机电压检测电路如图2所示,产生位置信号,触发开关管的通断。
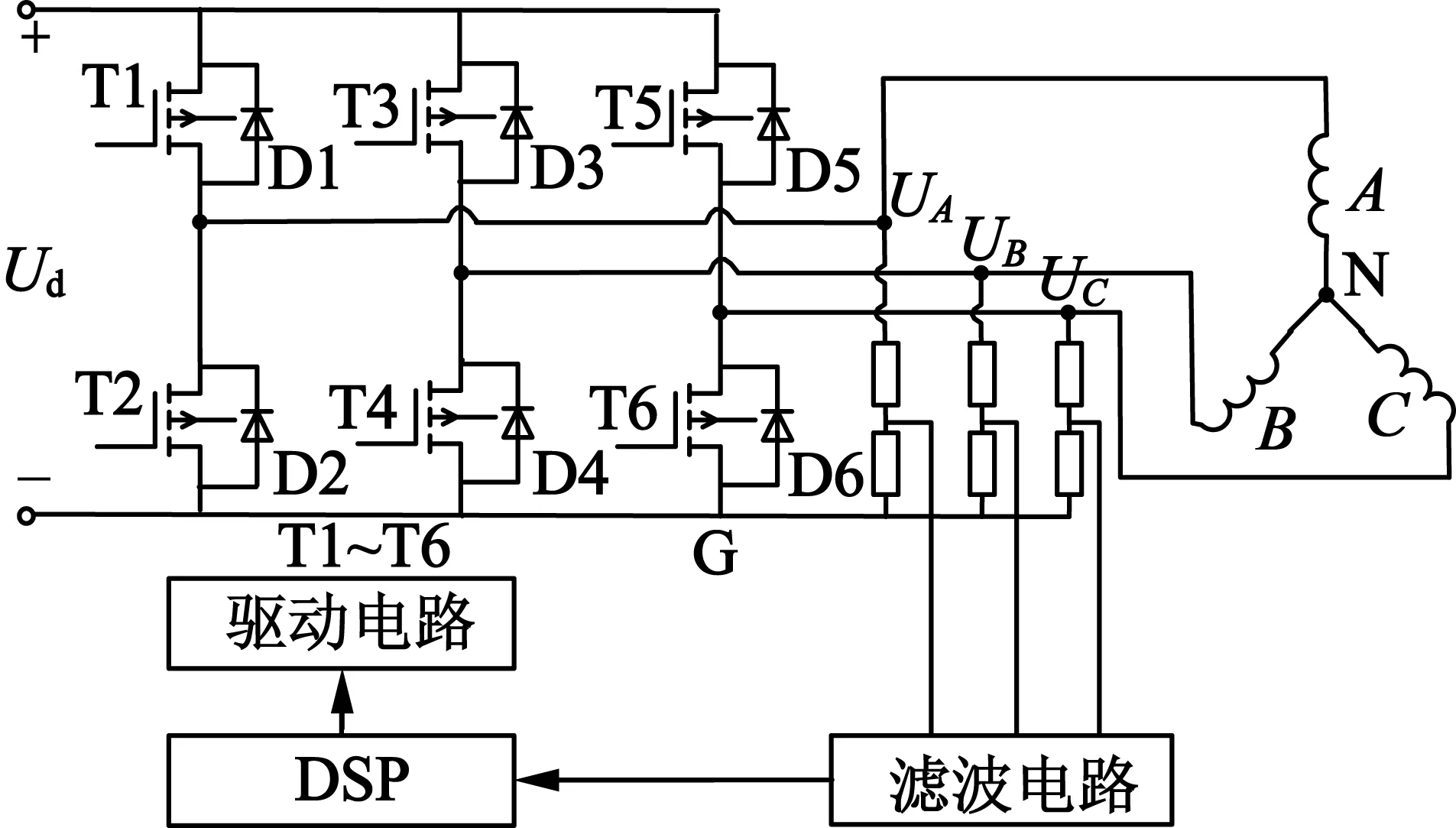
图2 端电压检测电路结构图
在端电压测量中,为了消除PWM斩波信号的高频开关噪声以及整个控制系统电路中的其它高频干扰信号,需要设计性能优越的低通滤波器对端电压进行处理。低通滤波器按RC滤波电路的多少,可分为一阶低通滤波器和高阶低通滤波器。阶数越高,幅频相频特性越陡峭,电路越复杂。本文采用二阶有源低通滤波器来处理端电压,且每相绕组连接一个滤波器。
二阶有源低通滤波电路的幅频响应和相频响应表达式,分别:
(1)
(2)

端电压频率与永磁无刷直流电动机的运行转速有关,转速越高,频率越大。电机的旋转频率越高,通过该滤波器的信号幅值衰减越大,检测到的端电压相位滞后越大,造成的位置相位误差也越大。
2 基于反电动势检测法电枢反应影响分析
2.1 电枢反应对气隙磁场的影响
在永磁无刷直流电动机中,气隙磁场由永磁磁动势和电枢磁动势相互作用产生。电机负载运行时,电枢电流产生的磁动势对气隙磁场的影响称为电枢反应。
A,B相通电时电枢磁场和永磁磁场的空间位置,如图3所示,图3(a)、3(b)、3(c)分别表示初始点、中间点和最终点时电枢反应磁动势Fa和永磁磁动势Fr的分解图。

(a)初始点(b)中间点(c)最终点
图3AB状态下三个时刻电枢磁动势和永磁磁动势的位置图
假设气隙均匀、磁路不饱和,将图3沿电枢磁场展开,通过叠加原理可得到气隙合成磁场波形,如图4所示,图中,Ba为电枢反应磁密分布波形,Br为永磁磁密分布波形,Bδ为气隙合成磁场波形。由图4可以看出,对于表贴式永磁无刷直流电动机,在一个状态角的不同时刻,合成气隙磁通密度分布不同,转子磁极都存在前部增磁、后部去磁现象;叠加后由于局部饱和,电枢反应引起平均气隙磁通密度下降。电枢反应使气隙合成磁场相对于永磁磁场向前偏移,气隙合成磁通密度分布过零点超前于原永磁磁场的过零点一个角度。电流越大,电枢反应磁密幅值越大,气隙合成磁场过零点的相位超前也越大。
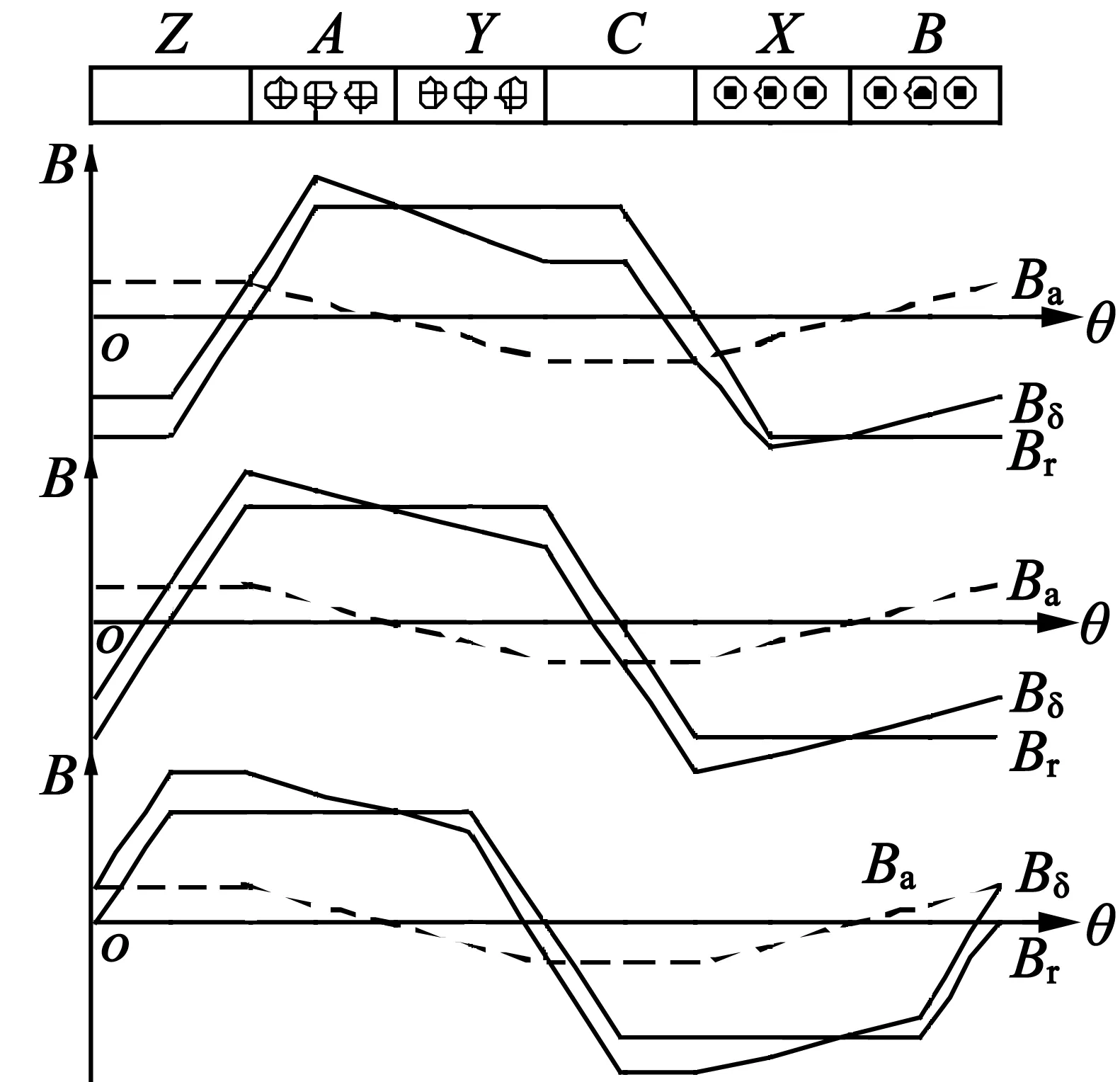
图4 AB状态下三个时刻电枢反应对气隙磁场的影响示意图
2.2 电枢反应对位置误差影响
永磁无刷直流电动机控制可以采用多种PWM调制方式[14-15],从而产生不同的端电压波形。由于永磁无刷直流电动机中定子电流的换相频率与转子的旋转电角频率同步,因此可以将气隙磁场波形和端电压波形画在统一的时空向量图上,如图5所示。本文采用上桥臂PWM 调制、下桥臂恒通(H_PWM-L_ON)的调制方式。假设PWM的占空比为50%,并忽略管压降,B相端电压波形如图5(a)所示。图中,b相反电动势在120°电角度和300°电角度时为0,此时b相端电压为0.5Ud。
由图5(b)可知,电枢反应使气隙合成磁场超前于原永磁磁场,进而使得负载下的反电动势在相位上超前于空载反电动势。端电压过零点由于反电动势相位的超前而提前到来,超前角度为γ,使电机偏离最佳换相时刻。负载电流越大,电枢反应对原永磁磁场的影响越显著,检测到的端电压过零点超前角也越大,使得最佳换相点前移角度大,位置误差也越大。因此在重载情况下,最佳换相点前移角度大,传统的霍尔位置传感器已不能满足控制要求。
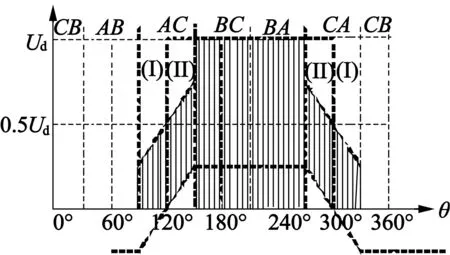
(a)理想情况
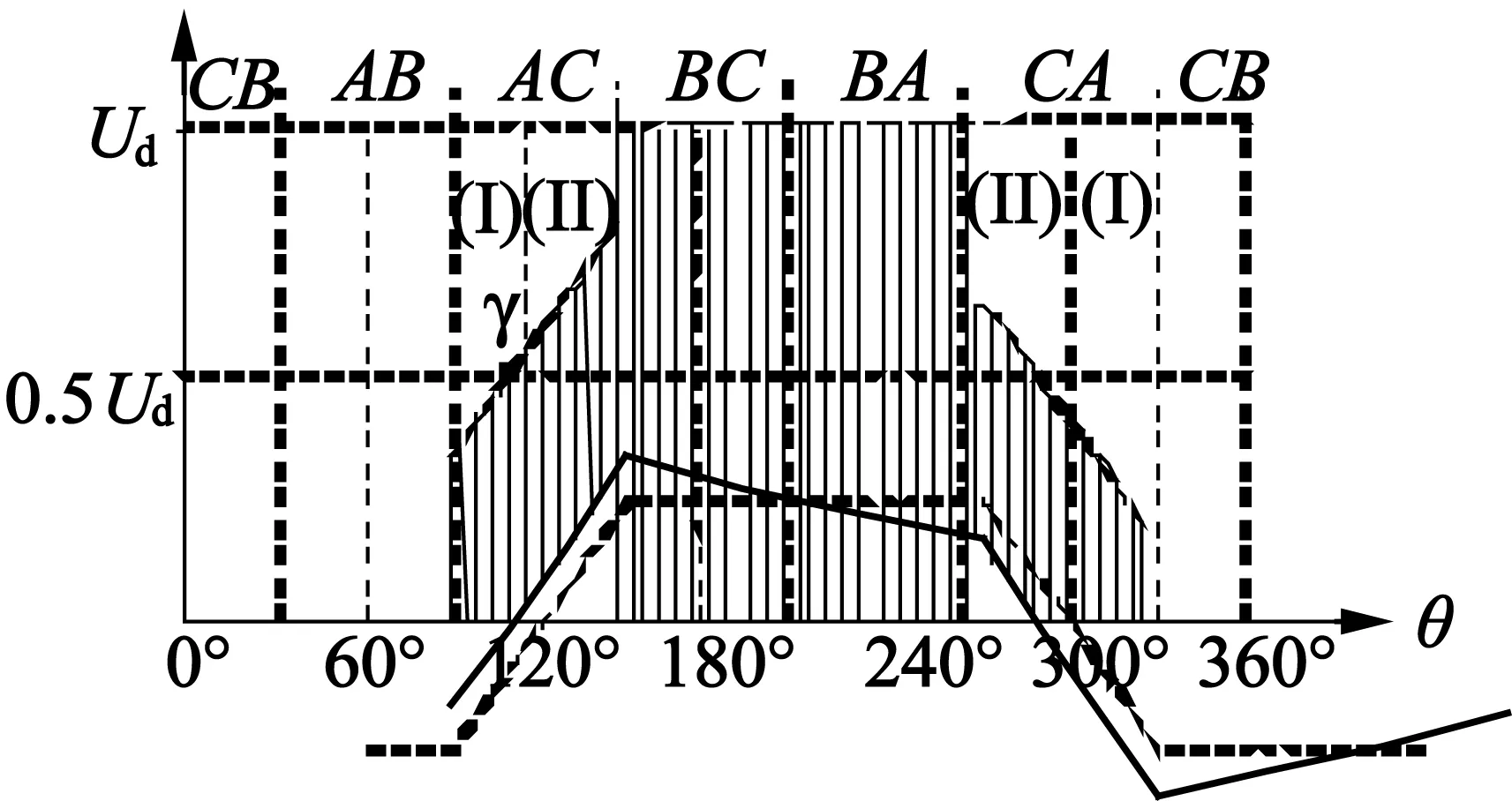
(b)电枢反应影响情况
3 位置信号校正策略及其实现
低通滤波电路和电枢反应会使检测到的位置信号产生偏移,降低了电机性能。因此,本文采用一种换相点自校正控制方法实时地调节反电动势过零点的延时角度来获得准确的换相位置信号,该方法易于工程上实现。

(3)
定义AB导通时A相电阻电感上的电压降为uA1,AC导通时A相电阻电感上的电压降为uA2,则:
(4)
(5)

(6)
AC两相导通时,A相电阻电感上的电压降uA2=uA21+uA22。
由式(4)~式(6) 可知,超前换相时uA2>uA1。当绕组等效电感较小时,可认为换相前后电流的变化与电压的变化同步,则此时A相绕组在AC导通区间相电流平均值大于AB导通区间相电流平均值,即换相点前后相电流差值Δi>0,超前角α越大,Δi越大。同理,准确换相和滞后换相亦然。
位置信号的相位误差可由非换流相相电流的幅值偏差准确反应,因此可以通过检测非换流相相电流设计闭环控制器,来消除该相电流的幅值偏差,继而校正换相点,带有换相点自校正的调速控制系统如图6所示。
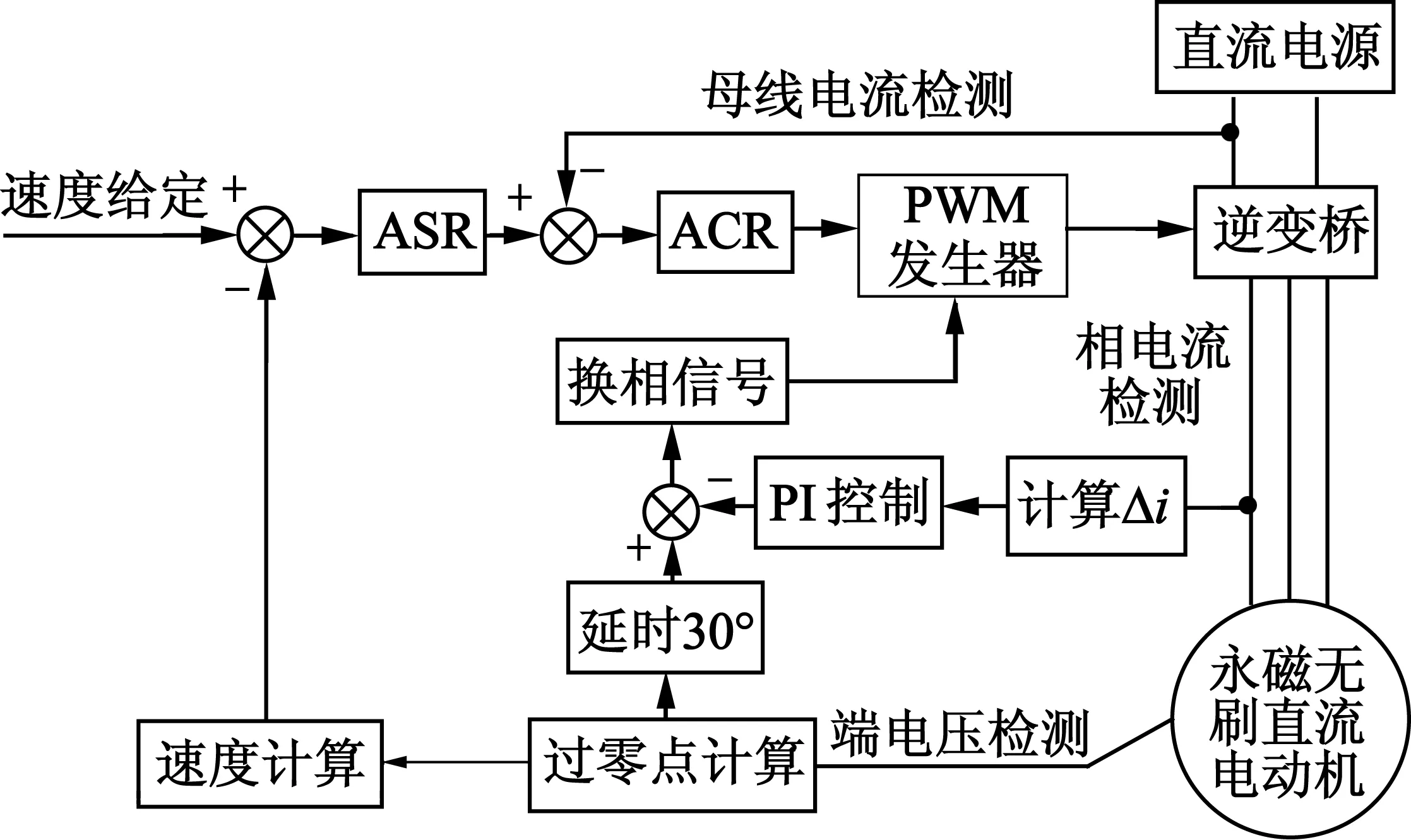
图6 带有换相点自校正的调速系统框图
以非换流相相电流偏差Δi为基准,通过设计PI控制器,得到位置信号相位误差补偿角度β,则补偿后的换相点延时角度:

(7)
当位置信号相位超前时,即非换流相相电流偏差Δi>0,对Δi进行PI调节,换相点延时角度δ减小,使得相电流下降,换相点相位误差减小,直至Δi=0;同理,当位置信号相位滞后时,即非换流相相电流偏差Δi<0,对Δi进行PI调节,换相点延时角度δ增大,使得相电流升高,换相点相位误差减小,直至Δi=0;当Δi=0时,不对换相点进行调节。通过对非换流相相电流偏差Δi的闭环调节,实时地校正换相点相位来获得准确换相信号。
4 实验结果及分析
本文以一台额定电压为24V,KV=179r·min-1·V-1,12槽7对极的无刷直流电动机,TI公司的数字信号处理器TMS320F2812和作为负载的磁粉制动器为基础搭起实验平台。
样机在满占空比空载运行时端电压滤波前后的波形如图7所示,滤波前的绕组端电压在换相续流时突变为Ud或者为0,滤波后该突变的电压脉动被削弱,端电压变得较为平滑。从图7可知,低通滤波会导致端电压过零点相位检测延迟,使得最佳换相点后移。图8为电机在空载和0.2 N·m负载情况下的换相信号,空载时无位置传感器生成的换相信号和有霍尔传感器产生的换相信号相位一致,而在负载情况下,无位置传感器生成的换相信号相位超前于有霍尔传感器产生的换相信号,说明电枢反应使得无位置传感器检测到的位置信号前移,与理论分析得到的结果一致。

图7 电机绕组端电压滤波前后波形
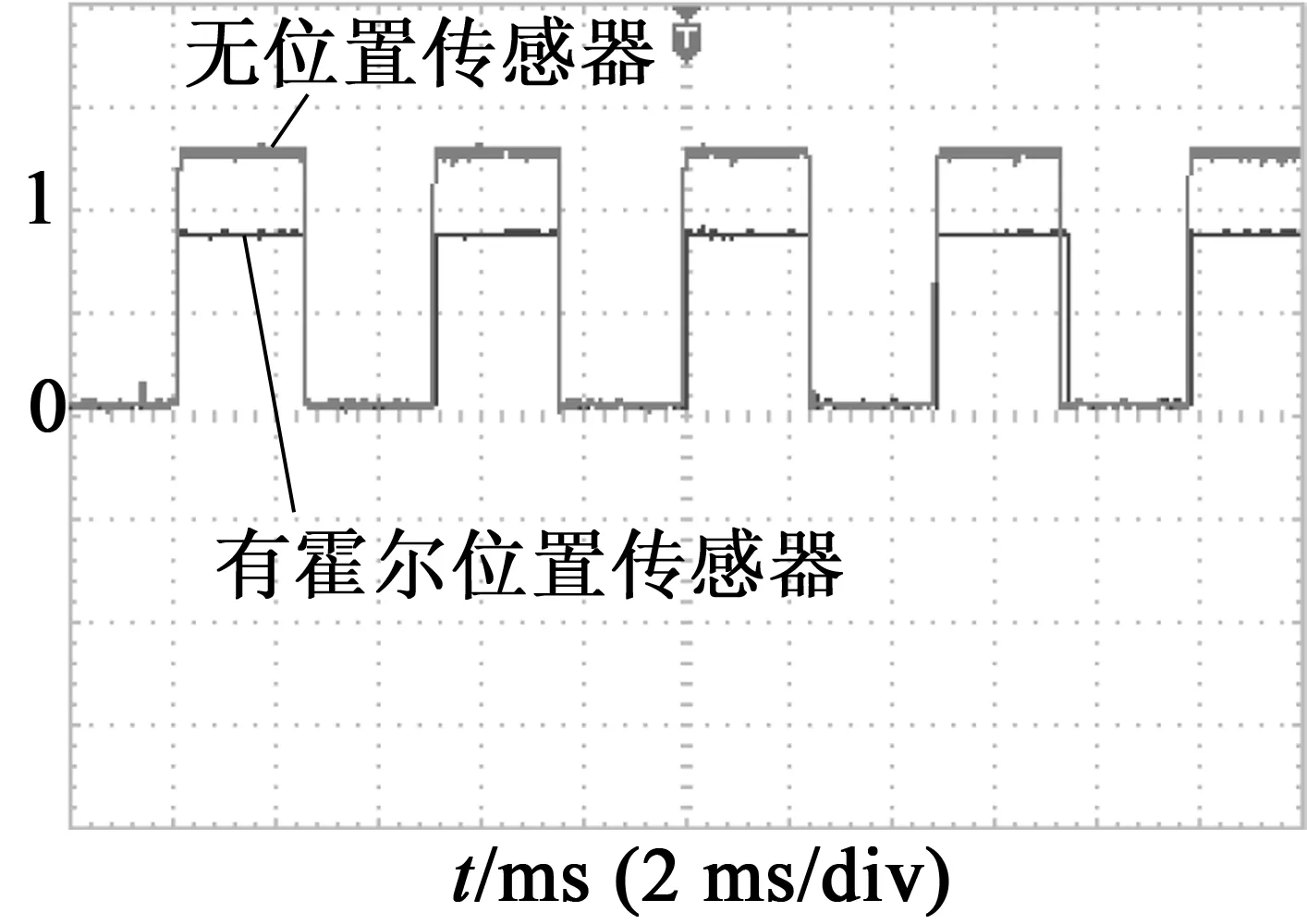
(a)空载情况
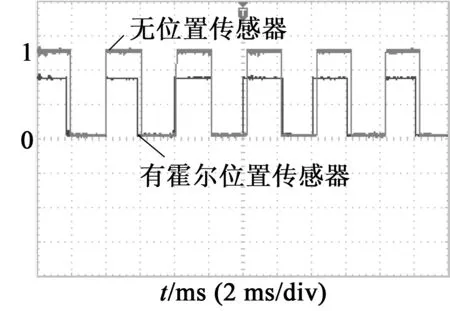
(b)0.2 N·m负载情况
在校正位置信号的实验中,对换相前后非导通相相电流进行多次采样并求取平均值,然后求取电流偏差进行相应的补偿,同时对补偿角度进行限幅,确保补偿时电机正常换相。图9为位置信号误差补偿前后端电压与相电流的实测波形。由图9(a)可见,由于最佳换相点前移而没有采取位置信号误差补偿,相电流波形在导通区间的前60°电角度和后60°电角度波形不对称且后60°电角度后半部分电流激增,正向电流和负向电流不对称。由图9(b)可见,实验中加入了非换流相相电流偏差的PI闭环控制后,电机根据补偿后的位置检测信号换相,相电流趋于稳定。
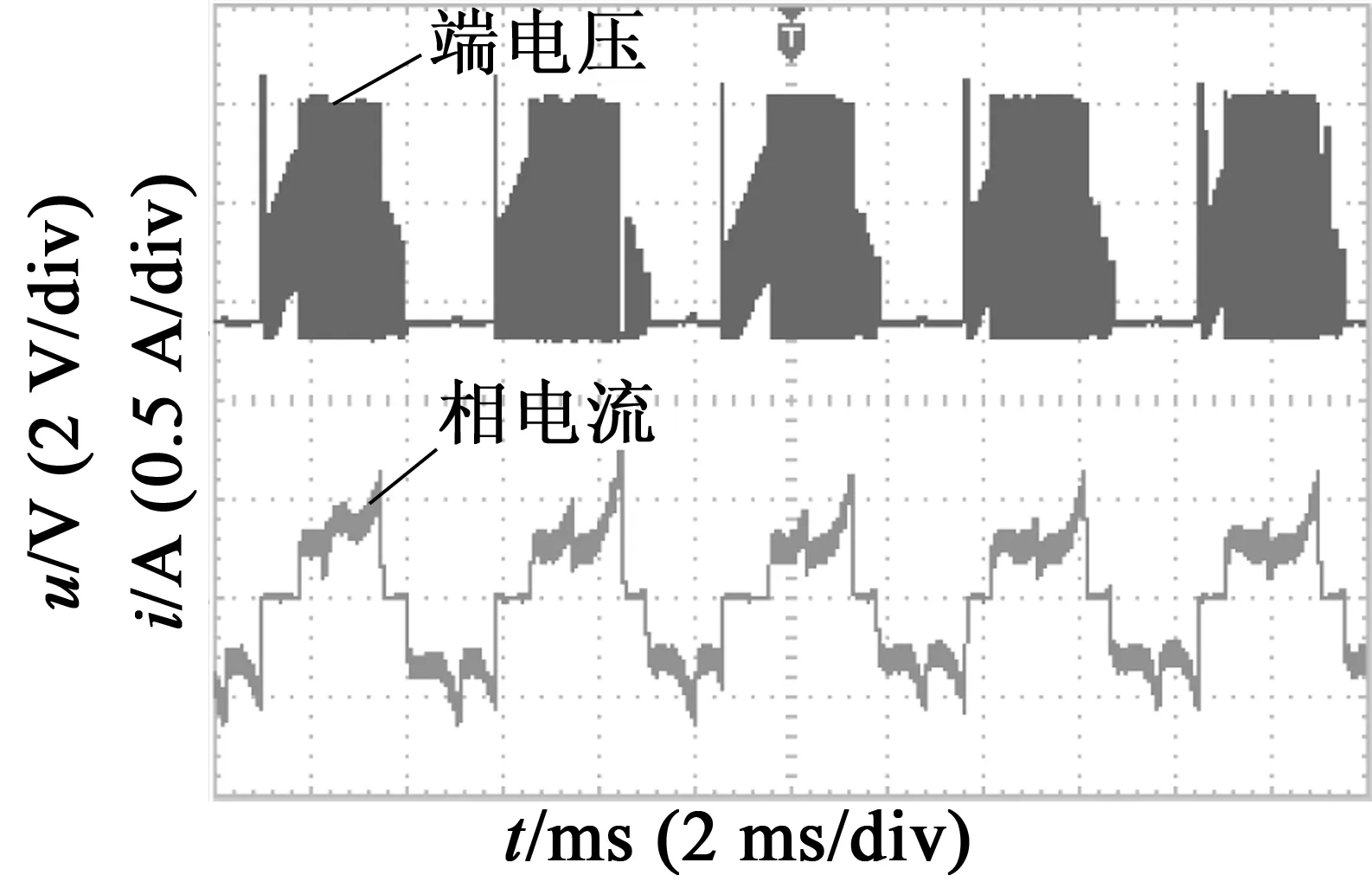
(a)补偿前
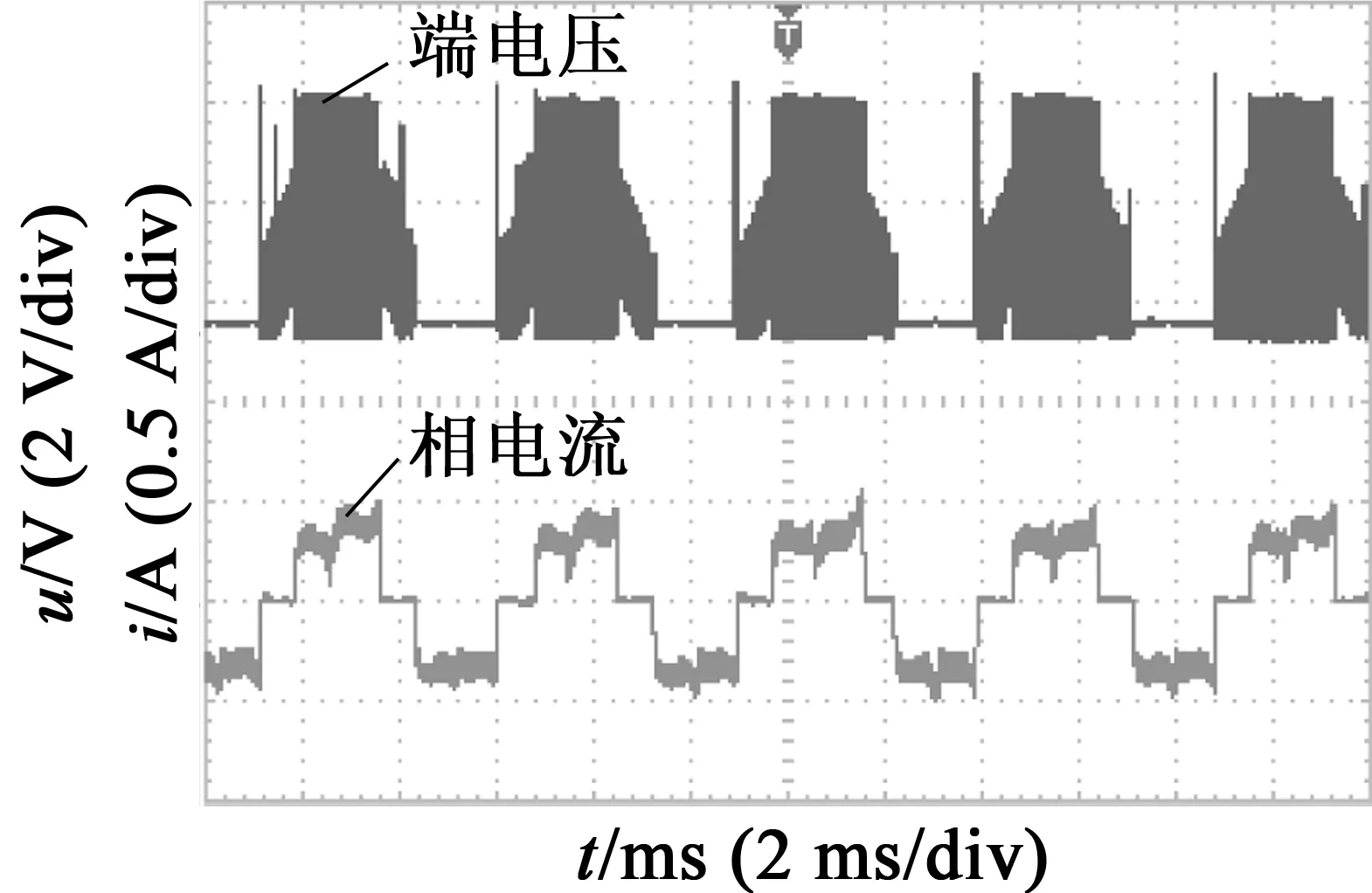
(b)补偿后
5 结 语
本文深入分析了反电动势检测法在实际工程应用中位置信号受低通滤波电路和电枢反应影响,并采取一种换相点自校正控制方法实时地补偿位置信号误差,得出如下结论:
(1)检测端电压的滤波电路使相位延迟,电机的转速越大,位置信号相位延迟的角度越大。
(2)电枢反应使得位置信号相位前移,且负载电流越大,相位前移角度也越大。
(3)非换流相相电流偏差的PI闭环控制使检测到的位置信号能够较准确的反应转子真实位置,实验结果验证了该方法的有效性。
[1] LAI Y S,LIN Y K.A unified approach to back-EMF detection for brushless DC motor drives without current and Hall sensors[C]//32nd Annual Conference on IEEE Industrial Electronics,2006:1293-1298.
[2] FRENEH C,ACARNLEY P.Control of permanent magnet motor drives using a new position estimation[J].IEEE Transactions on IA,1996,32(5):108-109.
[3] OGASAWARA S,AKAGI H.An approach to position sensorless drive for brushless DC motors[J].IEEE Transactions on Industry Applications,1991,27(5):928-933.
[4] TATEMARSU K,HAMADA D,UCHIDA K,et al.New approaches with sensorlessdrives[J]. IEEE Industry Applications Magazine, 2000, 6(4):44-50.
[5] CHEN Z,TOMITA M,DOKI S,et al.New adaptive slidingobservers for position-and velocity-sensorless controls of brushless DC motors[J].IEEE Transactions on Industrial Electronics,2000,47(3):582-591.[6] SHEN J X,LWASAKI S.Sensorless control of ultrahigh-speed pm brushless motor using Pll and third harmonic back EMF[J].IEEE Trans. on Industrial Electronics,2006,53(2):421-428.
[7] 杨明, 刘杰, 徐殿国. 重载条件下无刷直流电机无位置传感器驱动换相续流影响的分析及其补偿[J].中国电机工程学报, 2013, 33(30): 106-112.
[8] 郭研岐, 李红. 无位置传感器无刷直流电机换相点自校正控制方法研究[J].微电机,2013,46(2):59-62.
[9] JIANG Q,BI C,HUANG R.A new phase-delay-free method to detect back EMF zero-crossing points forsensorless control of spindle motors[J].IEEE Transactions on Magnetics,2005,41(7):2287-2294.
[10] SONG J H,CHOY I.A rotor position sensorless control based on neutral voltage compensation of brushless DC motors[C]//IEEE Power Electronics Specialists Conference,2004:1431-1437.
[11] 吴小婧,周波,宋飞.基于端电压对称的无位置传感器无刷直流电机位置信号相位校正 [J]. 电工技术学报,2009,24(4):54-59.
[12] 宋飞,周波,吴小婧.校正无位置传感器无刷直流电机位置信号相位的闭环控制策略[J]. 中国电机工程学报,2009(12):52-57.
[13] 谭建成.永磁无刷直流电机技术[M].北京:机械工业出版社,2011.
[14] 宋海龙,杨明.无刷直流电动机的无位置传感器控制[J].电机与控制学报,2002,6(3):208-212.
[15] 李自成,秦忆,陈善美.无刷直流电机无位置传感器控制关键技术研究[D].武汉: 华中科技大学,2010.
Analysis and Compensation of Position Error for Sensorless Brushless DC Motor
PAN Ji-lan,YU Jian-cheng,LIU Er-hao
(Northwestern Polytechnical University,Xi'an 710129,China)
The performance of sensorless brushless DC motor (BLDCM) under the influence of position error is reduced. This paper studied the effect of position error in the filter circuit and used the armature reaction in magnetomotive forcedistribution to analyze the influence of armature reaction to the position error. A commutation self-emendation method to compensate position error was proposed. Experimental results show that the filter circuit makes position phase delay, the armature reaction makes position phase advance and the commutation self-emendation method is effective.
brushless DC motor; sensorless; compensation of position error
2015-04-19
TM33
A
1004-7018(2016)02-0041-04
