基于扰动观测器的逆变器死区补偿方法研究
2016-11-30潘文贵邹曜璞韩昌佩
潘文贵,汪 超,张 磊,邹曜璞,韩昌佩
(1.中国科学院大学,北京 100039;2.中国科学院 上海技术物理研究所,上海 200083;3.中国科学院 红外探测与成像技术重点实验室,上海 200083)
基于扰动观测器的逆变器死区补偿方法研究
潘文贵1,2,3,汪 超1,2,3,张 磊1,2,3,邹曜璞1,2,3,韩昌佩2,3
(1.中国科学院大学,北京 100039;2.中国科学院 上海技术物理研究所,上海 200083;3.中国科学院 红外探测与成像技术重点实验室,上海 200083)
为了减小永磁同步电机矢量控制系统中由PWM逆变器死区效应引起的电流波形失真,对死区效应产生的原理以及影响进行了详细分析,设计了一种新的基于扰动观测器的在线死区补偿算法。该方法在两相旋转坐标系下对误差电压幅值进行估计并补偿,无需增加额外的硬件电路与电流极性检测,简单且易于实现,并且利用MATLAB对该方法进行了仿真。结果表明,该方法能够有效地抑制高次谐波电流分量,减小电机转速的波动。
死区时间补偿;永磁同步电机;逆变器;在线补偿;空间矢量脉宽调制
0 引 言
近年来,得益于功率开关器件如功率晶体管和绝缘栅双极型晶体管(以下简称IGBT)技术的飞速发展,脉宽调制式(以下简称PWM)电压源型逆变器(以下简称VSI)在精确调速控制系统中得到大量的应用[1-3]。在最常用的三相桥式PWM逆变器中,每相桥臂都有上下两个开关管。正常情况下,二者工作在互补状态,即上管开通时,下管关断;反之亦然。但是实际情况却并不能如此理想。由于开关管开通所需的时间比关断时间短,所以实际工作中有可能会出现某一管还未关闭而其对应的管子已经打开的情况,而开关管开通时其导通电阻极小,这样就会产生很大的导通电流,损坏器件。为了避免出现这种情况,需要在某一管关断之后,另一管开通之前插入一段称之为“死区”的时间。死区时间给系统带来安全性的同时也带来了不利的影响,会使得理想的标准正弦波形式的输出电压电流发生畸变,降低了基波幅值,增加了5、7、11、13次等高次谐波。尤其在系统处于低速运行,或者载波频率较高时,电机电磁转矩会产生较大的脉动,直接影响电机系统的运行性能[4-7],因此对于高精度控制系统,对死区效应进行补偿已经成为一个非常迫切的需求。
国内外已经有很多学者对PWM逆变器的死区效应问题进行了研究,并提出有针对性的补偿措施[4-12]。其中最简单的方法是离线补偿,即根据电机三相电流的方向,计算出死区时间带来的误差时间或者误差电压,通过增加一个与其幅值相同、方向相反的时间或者电压矢量来对死区进行补偿。该方法简单易行,在实际的项目中的应用也最为广泛,但是该方法的主要缺点也是其主要难点在于电流方向的准确检测。采用硬件的方法直接对电流方向进行检测往往会存在一定的滞后以及A/D转换部分带来的误差,通常需要对电流进行滤波。另外,受到噪声、PWM开关的高频干扰以及电流过零时的钳位效应的影响,此方法很难准确地获得电流的过零点[5]。针对电流的准确测量这一问题,文献[8]不是直接对电流进行测量,而是采用电流重构的方法间接地确定电流过零点,避免了硬件等方面的精度问题对电流测量精度的影响。但是这种方法的主要问题在于它受电流矢量角估计精度的影响较大,在系统处于低频运行时,电流矢量角的估计精度会有所下降,从而导致电流过零点确定不准确,影响到死区的补偿效果。文献[12]采用平均死区时间补偿法,在两相静止轴系中对等效死区时间产生的误差电压进行补偿,利用旋转轴系中的励磁电流和转矩电流分量经过坐标变换来判断电流矢量所处的扇区,从而决定需要施加的补偿电压。这种方法不需要直接判断三相电流的极性,可以得到准确的电流矢量所属的扇区。实际应用中,由于开关器件的通断时间和器件自身的饱和压降会随工作条件的变化而变化,而准确测量开关时间和器件自身压降是比较困难的,所以用传统的方法实现精确的死区补偿效果并不理想。
针对上述问题,本文提出了一种基于扰动观测器的PWM逆变器死区效应在线补偿方法。该方法全部通过软件的手段完成,无需增加额外的硬件电路和离线测量,实现起来较为简单,并且能够有效地减小电机在低速运转时输出电流和电机转速的波动,在一定程度上消除了死区效应给系统带来的影响。
1 死区效应分析
图1为三相PWM-VSI驱动永磁同步电机的原理图,以a相为例分析PWM逆变器的死区效应,定义相电流的方向以流向负载为正方向。在死区时间内,上下两开关管都为关断状态,但是由于电机绕组中感性负载的作用,三相电流不会立即减小到零,而是通过续流二极管流动。所以在死区时间内,该桥臂的输出电压大小不受开关管控制,而是由相电流的方向决定。当ia>0时,有两种工作状态,正常工作状态时桥臂的上管Sa+开通,下管Sa-关断,电流通过Sa+流向电机,使a点的电位为+Udc/2;在死区时间内,Sa+和Sa-都关断,电流ia通过续流二极管Da-续流,使a点的电位钳位在-Udc/2上。同理可以对ia<0的情况进行分析。另外,由于开关管的通和断也都需要一定的时间,而且开关管自身和续流二极管在开通时都存在一定的管压降,所有这些因素的共同作用使输出电压与理想情况之间存在一定的误差[12]。
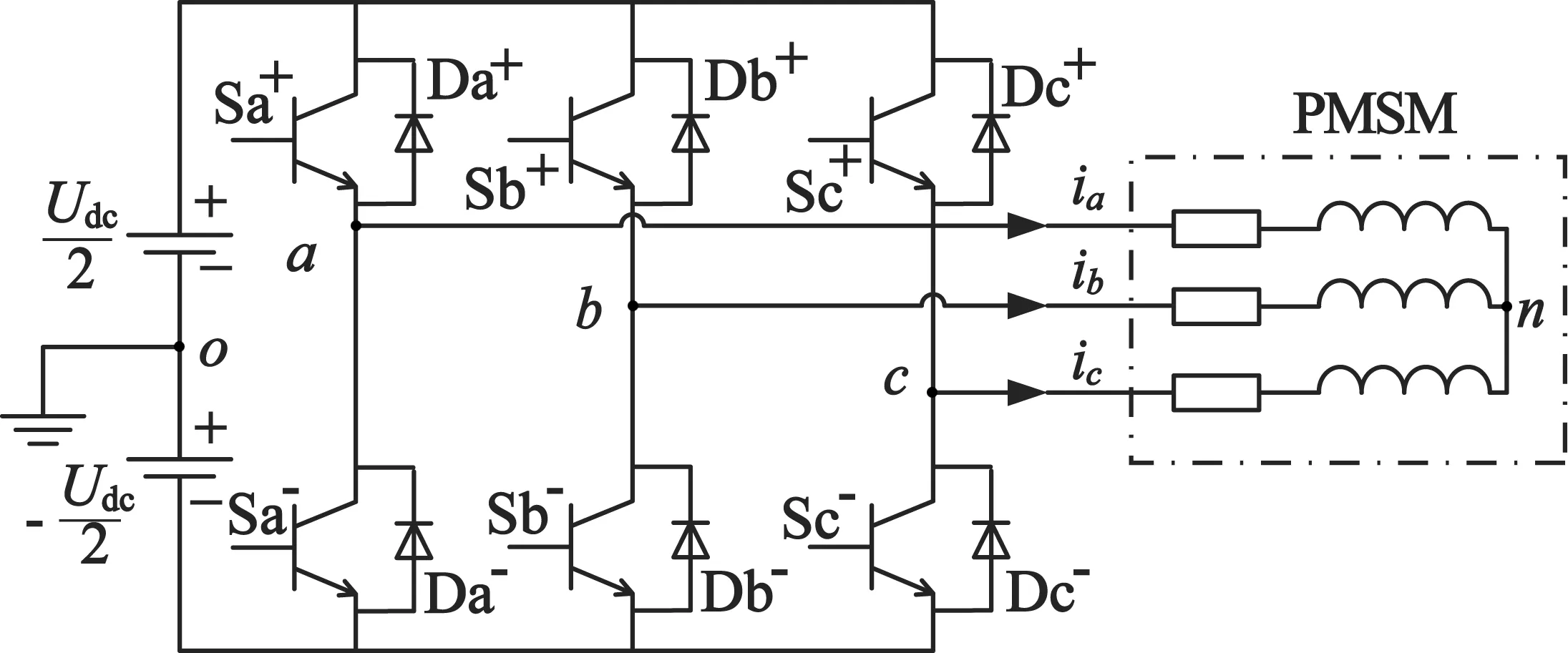
图1 三相PWM逆变器驱动永磁同步电机系统结构图

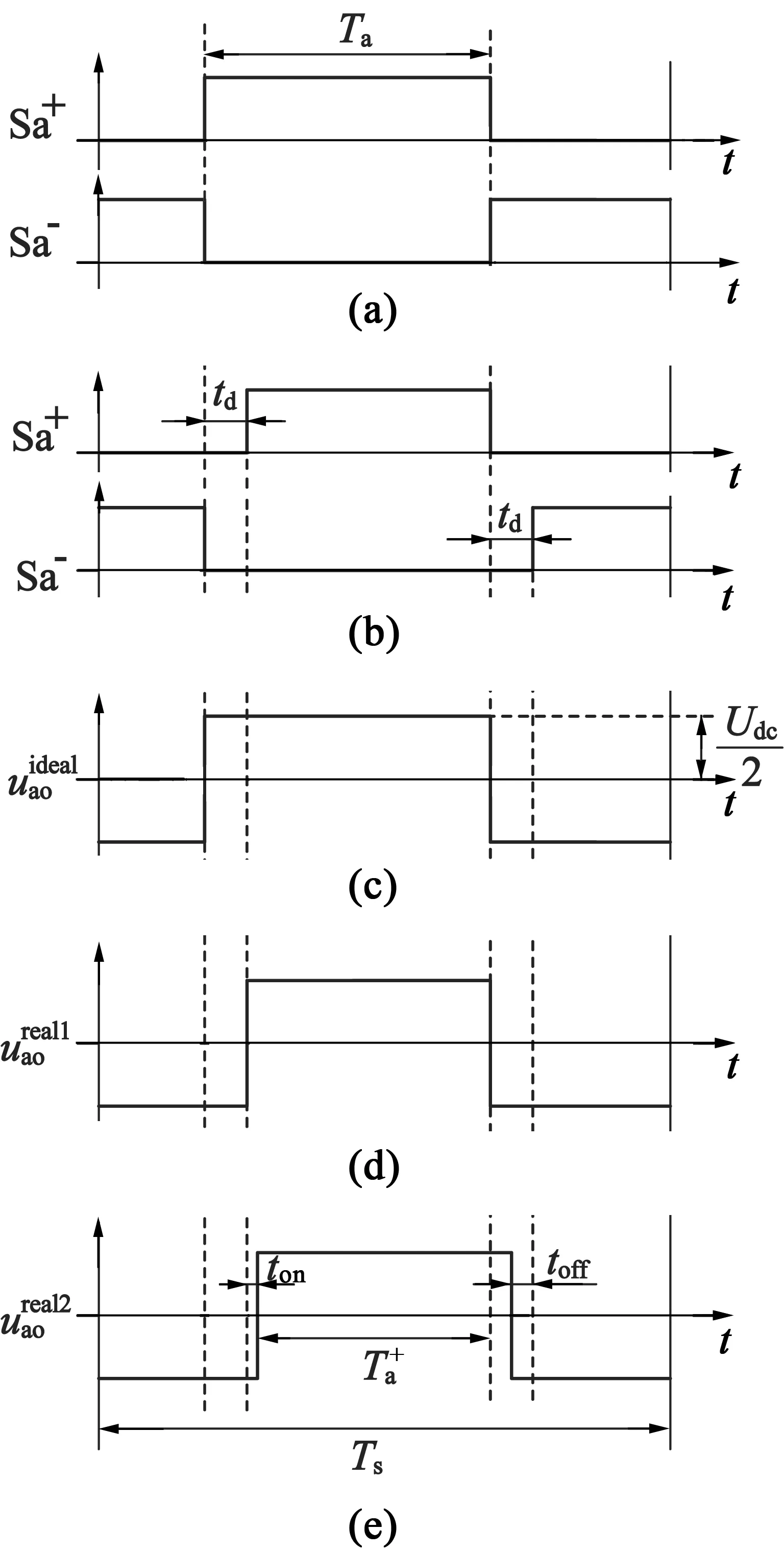
图2 ia>0时的开关信号和死区效应误差电压
如果将td,ton,toff都考虑在内,则当ia>0时,等效死区时间可以表示为如下:
(1)

类似地,当ia<0时,等效死区时间可以表示:
(2)
上面两个方程可以总结如下:
(3)

实际输出电压与理想输出电压在一个周期内的平均误差电压可以表示为如下:
(4)
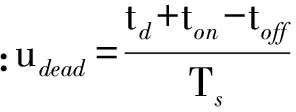
考虑开关管和二极管的导通压降,udead可以表示如下[10]:
(5)
式中:usat为开关管导通时的导通压降;ud为二极管续流时产生的管压降。
由上述分析可见,死区效应引入的误差电压矢量的幅值与电机的直流母线电压和等效死区时间成正比,与载波周期成反比,误差电压适量的方向由相电流的极性确定。当误差电压的幅值远小于实际输出电压的幅值时,其对控制系统的影响不大。而当电机工作在低速或者小负载的情况下时,由于加在电机上的电压幅值较小,误差电压与之相比不容忽视,会使得输出电压电流的波形质量受到较大的影响,引起电机转速的波动,限制电机的最低转速,导致电机转矩发生脉动。
2 在线死区补偿
针对死区效应带来的不利影响,死区补偿工作成为一项亟待解决的问题。本文在总结前人工作的基础上,针对死区补偿问题的特殊性与复杂性,提出一种较易实现的在线死区补偿方法。该方法将死区效应等各种非理想因素造成的死区误差电压转换到两相旋转坐标系中,作为扰动电压,并对其进行在线估计,然后前馈给逆变器输入端,进行电压前馈补偿。本方法的具体内容在下文给出。
两相旋转坐标系下的永磁同步电机的电压方程可以写成如下形式:
(6)
(7)
式中:ud和uq分别表示d轴和q轴的电压;id和iq分别表示d轴和q轴的电流;Rs表示定子阻抗;Ld和Lq分别表示d轴和q轴的电感;p为电机极对数;ωr表示转子的机械角速度;ψf表示转子永磁体磁通。uq,err和ud,err分别表示死区效应引入的交直轴扰动电压。

(8)
在一个采样周期内死区效应引起的扰动电压没有较大的变化[11],因此有:
(9)
基于式(9)的假设,当前时刻的扰动电压可通过前一时刻的扰动电压来估计。估计计算公式如下:
(10)
因此,我们可以采取电压前馈的方式对死区效应进行在线补偿。该算法的系统框图如图3所示,其中,符号“^”代表估计值。
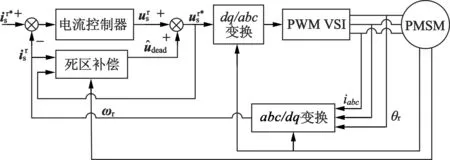
图3 在线死区补偿方案控制框图
3 仿真与结果分析
使用MATLAB/Simulink可以建立在线死区补偿算法的仿真模型,如图4所示。本模型为速度与电流双闭环结构,驱动电机为永磁同步电机,采用id=0的矢量控制算法,模型的仿真参数如下:电机极对数p=6,定子相电阻R=2.35Ω,交直轴定子电感Ld=Lq=8.35mH,转子及负载转动惯量J=0.002 5kg·m2,转子磁通ψf=0.045 8Wb,直流母线电压Udc=300V,PWM开关频率Fs=8kHz,死区时间td=5 μs。速度指令分为加速段和匀速段,加速段速度从0开始以恒定加速度进行加速,加速时间为0.1 s,加到一定速度后保持匀速转动。匀速段转速设定为150 r/min,对应的基波频率为15 Hz。模型采用定步长的求解器,步长选择2×10-7s,以尽量接近连续系统。
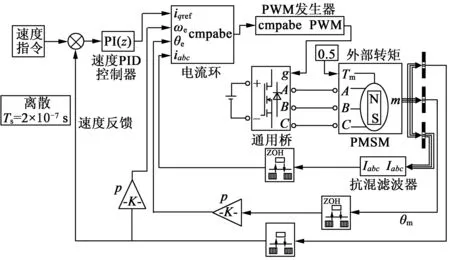
图4 死区补偿Simulink仿真模型
图5(a)为无死区(死区时间设置为零)的情况下三相电流波形,图5(b)表示此时的电机转速控制误差波形。从图5中可以看出,在匀速段,三相电流为标准的正弦波曲线,相位相互差120°。速度误差很快减小到零,并且在匀速段速度波动很小,峰峰值为0.000 4 rad/s。
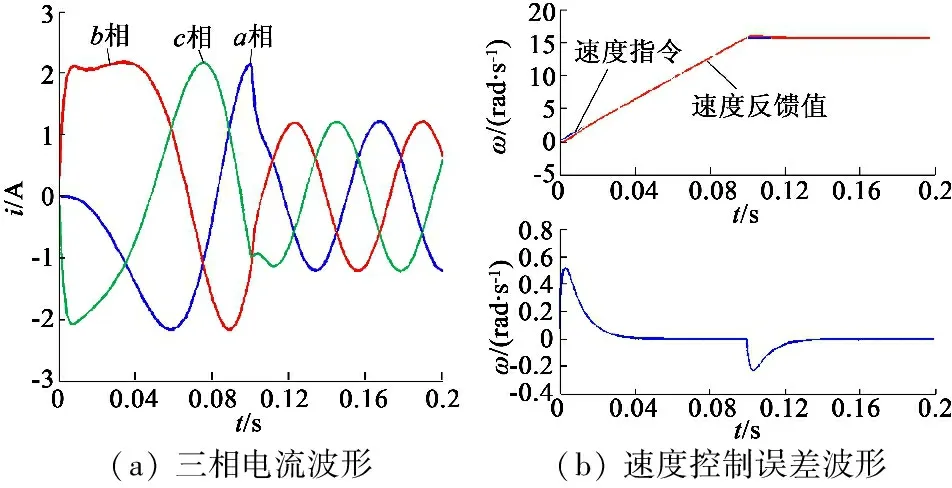
图6为加入死区后的定子三相电流波形以及对应的速度误差曲线。从图6中可以看出,定子三相电流存在较为明显的畸变,并且出现了明显的零电流钳位现象;另外,匀速段速度曲线的波动明显增大,峰峰值为0.02 rad/s。
图7为采用死区补偿措施后的定子三相电流波形以及对应的速度误差曲线。结果显示,相电流与速度曲线的波形与未补偿时相比变得平滑,更接近无死区时的波形。匀速段速度曲线的波动得到有效减小,峰峰值减小到0.002 rad/s。
(a)三相电流波形(b)速度控制误差波形
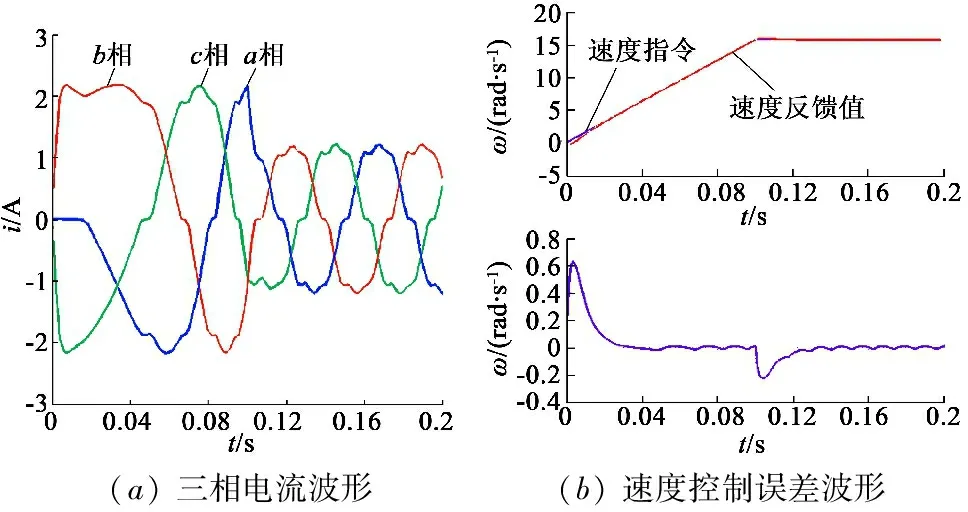
图5 无死区时的仿真波形
图6 有死区时的仿真波形
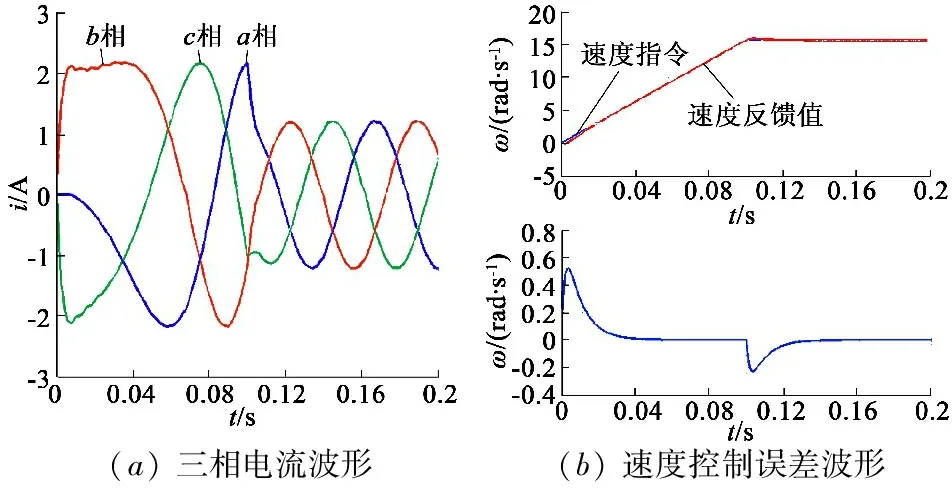
(a)三相电流波形(b)速度控制误差波形
图7 死区补偿后仿真波形
图8(a)和图8(b)分别为死区补偿前后A相电流的谐波分量。结果显示,死区补偿前相电流的总谐波失真为5.96%,其中5次及7次谐波成份较大,经过死区补偿后总谐波失真下降到2.68%。通过对比分析可以得出结论,本文提出的死区补偿方法能够很好地消除死区效应。
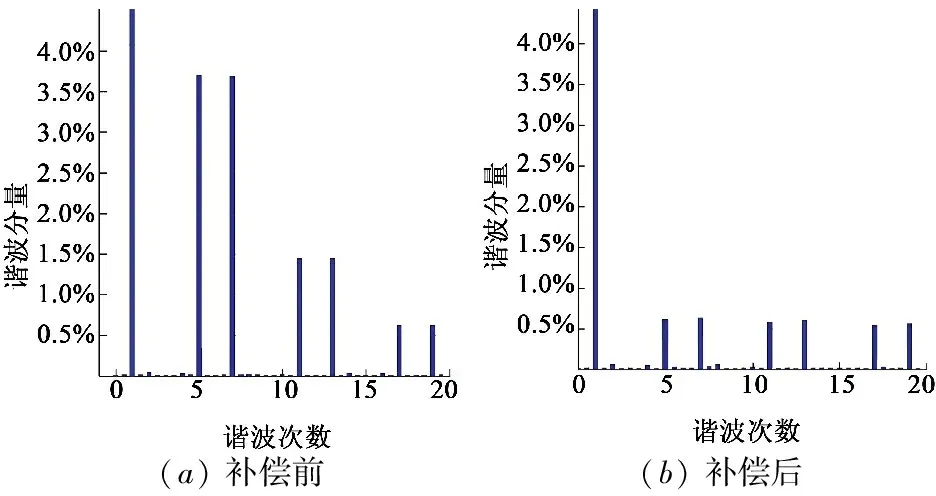
(a)补偿前(b)补偿后
图8 定子相电流谐波分量仿真结果对比图
4 结 语
针对永磁同步电机矢量控制系统中三相桥式逆变器死区效应带来的逆变器输出电压和电流波形失真以及速度波动变大等问题,本文提出了一种基于扰动观测器的在线补偿算法。该方法无需额外的硬件电路支持与参数离线测量便可以估计出死区误差电压并进行补偿,简单且易于实现,具有较好的实用价值。最后利用MATLAB对补偿算法进行了仿真,仿真结果证明了该方法能够明显降低死区效应带来的高次电流谐波,减小速度波动,改善电流波形质量,提升控制系统的性能。
[1]ATTAIANESEC,NNARDIV,TOMASSOG.AnovelSVMstrategyforVSIdead-time-effectreduction[J].IEEETransactionsonIndustryApplications, 2005, 41(6): 1667-1674.
[2]BLAABJERGF,PEDERSENJK,THOEGERSENP.ImprovedmodulationtechniquesforPWM-VSIdrives[J].IEEETransactionsonIndustrialElectronics,1997,44(1):87-95.
[3] 杨贵杰,孙立.空间矢量脉宽调制方法的研究[J]. 中国电机工程学报,2001,21(10): 79-83.
[4]BENBL.Theanalysisandcompensationofdead-timeeffectsinthreephasePWMinverters[C].IEEEIECON1998,(2):792-797.
[5]SEUNGGJ,MINHP.Theanalysisandcompensationofdead-timeeffectsinPWMinverters[J].IEEETransactionsonIndustryApplication,1991,38(2):108-114.
[6]JONGLL.Anewapproachofdead-timecompensationforPWMvoltageinverters[J].IEEETransactionsonCircuitsandSystems, 2002, 49(4): 476-483.
[7]ATTAIANESEC,TOMASSOG.Predictivecompensationofdead-timeeffectsinVSIfeedinginductionmotors[J].IEEETransactionsonIndustryApplications, 2001, 37(3): 856-863.
[8]SUKEQAWAT,KAMIYAMAK,MIZUNOK,etal.FullydigitalvectorcontrolledPWMVSI-fedACdriveswithanInverterdead-timecompensatorstrategy[J].IEEETrans.onIndustryApplications,1991,27(3):552-559.
[9] 吴茂刚,赵荣祥,汤新舟.空间矢量PWM逆变器死区效应分析与补偿方法[J].浙江大学学报:工学版,2006,40(3):469-473.
[10]KIMHS,KIMKH,YOUNMJ.On-linedead-timecompensationmethodbasedontimedelaycontrol[J].IEEETransactionsonControlSystemsTechnology,2003,11(2):279-285.
[11]KIMKH,YOUNMJ.AsimpleandrobustdigitalcontroltechniqueofaPMsynchronousmotorusingtimedelaycontrolapproach[J].IEEETransactionsonPowerElectron,2001,16(1):72-82.[12] 王高林,于泳,杨荣峰,等.感应电机空间矢量PWM控制逆变器死区效应补偿[J].中国电机工程学报,2008,28(15):79-83.
Dead-Time Compensation Method for Three-Phase Inverters Based on Disturbance Observer
PAN Wen-gui1,2,3, WANG Chao1,2,3,ZHANG Lei1,2,3, ZOU Yao-pu1,2,3,HAN Chang-pei2,3
(1.University of Chinese Academy of Sciences,Beijing 100039,China;2.Shanghai Institute of Technical Physics,CAS,Shanghai 200083,China 3.Key Laboratory of Infrared System Detection and Imaging Technology,CAS,Shanghai 200083,China)
To reduce current distortion caused by dead time of pulse width modulation (PWM) inverter in permanent magnet synchronous motor vector control system, a novel on-line method was proposed for dead-time effect compensation based on disturbance observer after analyzing the mechanism and influence of dead-time effect in details. The proposed method estimats amplitude of error voltage in rotary reference frame and compensates the distortion by adding it to the current loop. This method does not need additional hardware circuits and detection of the current polarity. Also it is simple to be realized. The MATLAB simulation results show the effectiveness of eliminating harmonic current components, improving the current waveform quality, reducing the motor speed fluctuation.
dead-time compensation; permanent magnet synchronous motor; inverter; on-line compensation; space vector PWM
2015-01-30
TM464;TM341
A
1004-7018(2016)02-0004-04
