线电压确定无刷直流电动机转子位置新方法
2016-11-30马铁华吕彩琴
殷 帅,马铁华,吕彩琴
(中北大学,太原 030051)
线电压确定无刷直流电动机转子位置新方法
殷 帅,马铁华,吕彩琴
(中北大学,太原 030051)
针对无位置传感器无刷直流电动机控制问题,提出一种基于线电压的转子位置检测新方法。依据绕组电压方程,给出了电机反电动势计算方法。通过采样电机线电压,得出反电动势计算值,确定电机换相时刻。为解决反电动势计算值中窄脉冲引起过零点误判的问题,依据反电动势变化率在换相时刻远大于非换相时刻的原理,采用反电动势变化率检测法判断过零点时刻。仿真和实验结果显示该方法能够准确提供转子位置信息,在负载转矩恒定和突变情况下无换相错误等异常情况,表明该方法具有良好的适应性和可靠性。
无刷直流电动机;无位置传感器控制;线电压;反电动势变化率检测
0 引 言
无位置传感器无刷直流电动机以其高效率、结构紧凑、抗干扰能力强、大功率密度和优越的调速性能等优点,在汽车、家用电器、航空航天中取得了广泛的应用[1]。如何在没有位置传感器前提下准确获取电机转子位置信息,成为无位置传感器无刷直流电动机研究热点之一。现有的转子位置检测法有反电动势法[2-7]、电感法[8-9]、磁链法[10-11]等,其中反电动势法是目前技术最为成熟,应用最为广泛的方法。
文献[2-4]提出一种基于线反电动势的转子位置检测方法。其中,文献[3]在确定线反电动势上升到最大值时为换相时刻的基础上,通过采样线电压和相电流来获取换相点。该方法由于不采用过零点检测,使其不用相移,但实际线反电动势波形在平顶处有毛刺,容易引起换相信号的误判,降低了系统的可靠性。且该方法不仅需要检测相电流,还需要检测相电压,增加了控制系统成本。文献[4]虽能很好地给出转子位置信息,但硬件中需要增加相电流、线电压检测模块,且软件中还需要积分运算,增加了控制单元的CPU消耗。端电压检测法[5]实现简单,只需经软件计算或硬件电路即可获得反电动势过零点,然后延迟π/6电角度即为换相时刻。但实际电路中,无刷直流电动机中性点往往不引出,使得端电压不易获取,导致该方法的实用性不高。文献[6-7]提出一种通过采样线电压实现反电动势过零点检测的无位置传感器无刷直流电动机换相控制方法。
为准确给出该电机转子位置信息,这里提出一种基于线电压的无刷直流电动机无位置传感器控制方法。该方法通过检测线电压,只需简单的求和运算即可给出反电动势计算值,再通过软件获取反电动势的过零点,确定转子位置信息。该方法仅需检测线电压,易于硬件实现,且软件运算简单,对控制CPU消耗低。最后通过仿真和实验验证了该方法的可靠性和实用性。
1 基于线电压的换相控制实现
1.1 无刷直流电动机数学模型
无刷直流电动机绕组相电压由电阻压降、交变电流引起的绕组自感电动势、绕组间互感电动势和绕组磁通量变化引起的感应电动势组成。
以a相绕组为例,该相绕组相电压可表示:
(1)
式中:R为a相绕组电阻;L为a相绕组自感与互感差;ia为a相绕组的电流;un为中性点电压。
假设每相绕组参数相同,无刷直流电动机三相绕组相电压可表示:
(2)
式中:ua,ub,uc为三相绕组相电压;ia,ib,ic为三相绕组电流;ea,eb,ec为三相反电动势;R为每相绕组电阻;L为每相绕组自感与互感差。
在实际工程中,无刷直流电动机中性点一般不引出,使得相电压不方便测量,而线电压可以通过测量功率器件导通时直流侧电压获得,易于测量,线电压可表示:
(3)
在忽略电机机械损耗和杂散损耗时,无刷直流电动机电磁功率全部转化为转子动能做功,电机转矩可表示:
(4)
式中:Te为电磁转矩;ω为电机机械角速度。
三相绕组星型连接无刷直流电动机等效电路如图1所示。图中的电流、电感、反电动势方向为计算时参考方向。
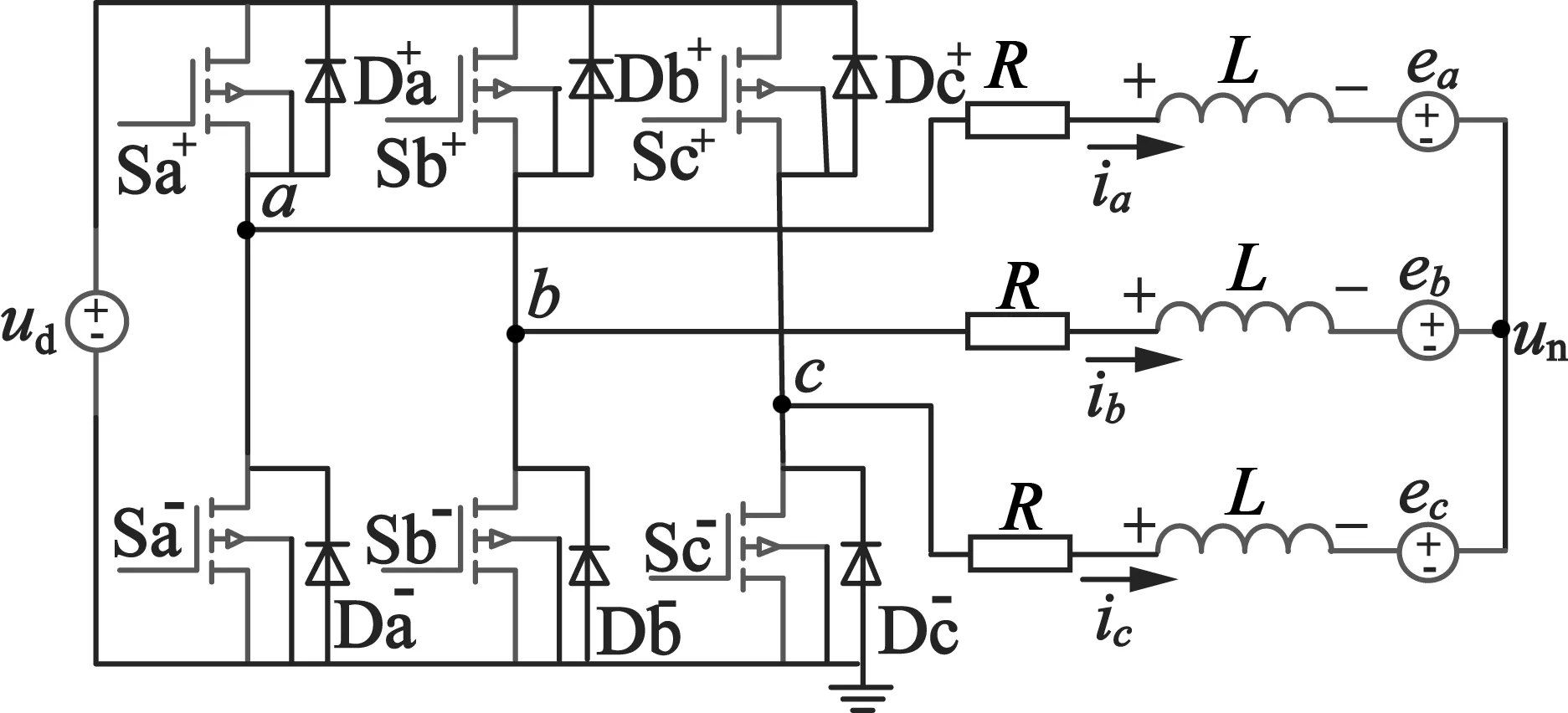
图1 星型连接无刷直流电动机等效电路
1.2 控制方法原理
两两导通下电机相电流和三相反电动势关系[12]如图2所示。图中圆圈标注地方为反电动势过零点时刻,根据相电流和反电动势对应关系,可知无刷直流电动机在过零点后延迟30°电角度即为电机的换相时刻,因此通过检测反电动势过零点来实现换相控制是可行的。
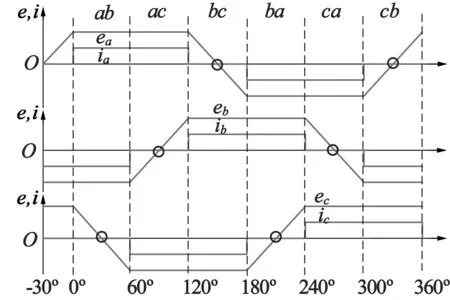
图2 梯形波反电动势及绕组相电流波形图
然而,由于无刷直流电动机反电动势为感应电势,且电机运行时三相绕组加载相电压,这使得反电动势不易直接测量。为此,这里提出一种通过测量线电压实现反电动势间接观测方法。
以ab相导通、c相悬空时刻说明通过基于线电压的反电动势检测原理。
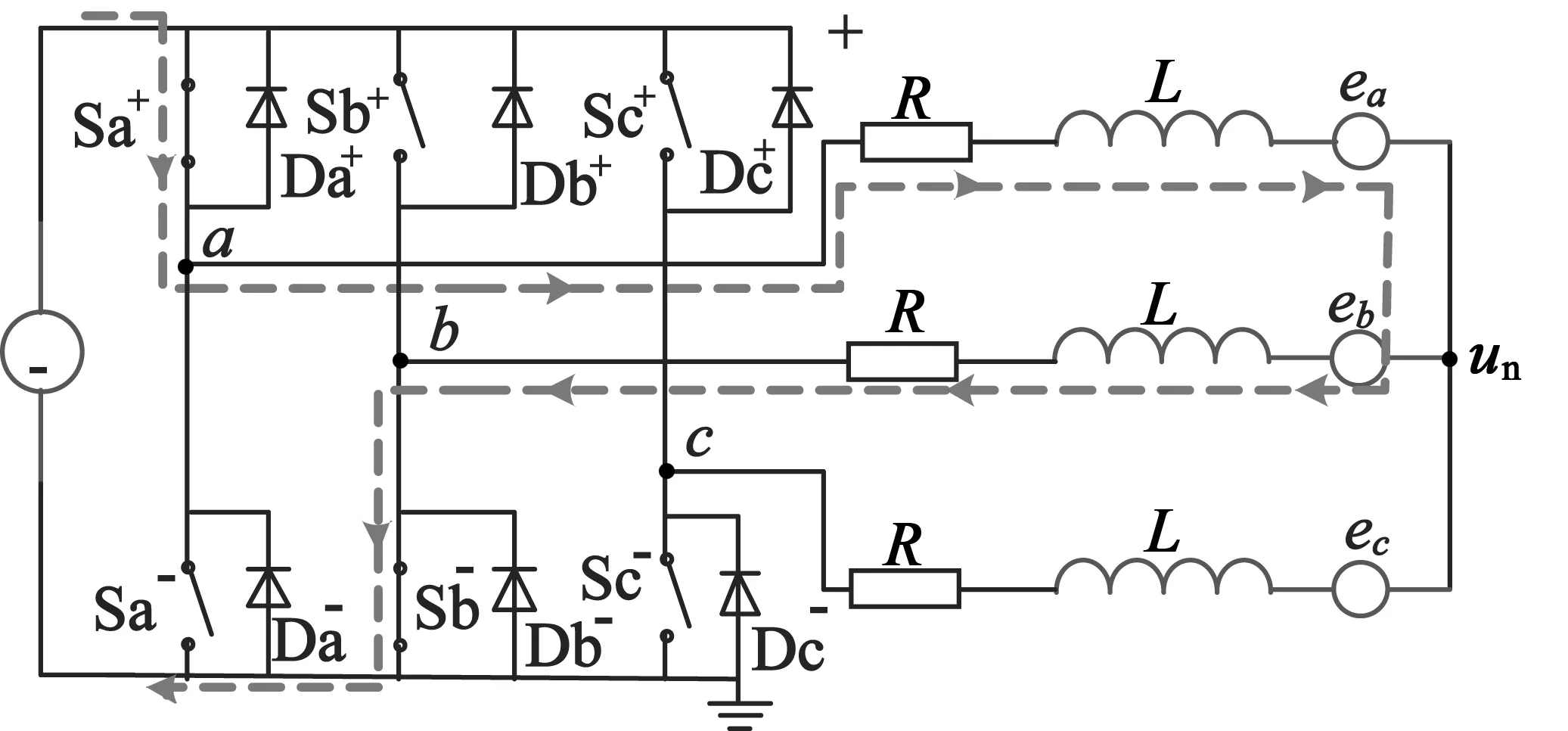
图3 ab相导通、c相悬空时绕组电流情况
此时三相绕组相电压关系有:
(5)
对上述ua,ub取和,可得:
(6)
在任意时刻,三相绕组相电流恒有:
(7)
此时,ab相绕组反电动势位于梯形波反电动势平顶处且方向相反,相反电动势有:
(8)
代入式(6),可得中性点电压:
(9)
将式(9)代入c相绕组相电压方程,可得:
(10)
同理可求得a相、b相绕组相反电动势:
(11)
至此可知,在获取线电压波形后,可通过运算获得当前时刻反电动势值,这使得不易观测的反电动势变得易于观测。
2 仿真研究
基于上述控制方法,在MATLAB/Simulink中建立无刷直流电动机仿真模型。实验样机参数:额定直流侧电压ud=24V;额定转矩TN=0.18N·m;额定转速nN=2 000r/min;相电阻R=1.2Ω;电感L=1.2mH。
无刷直流电动机的线电压会耦合高频PWM噪声,这里加入低通滤波器滤波后对线电压进行采样。滤波电路如图4所示。
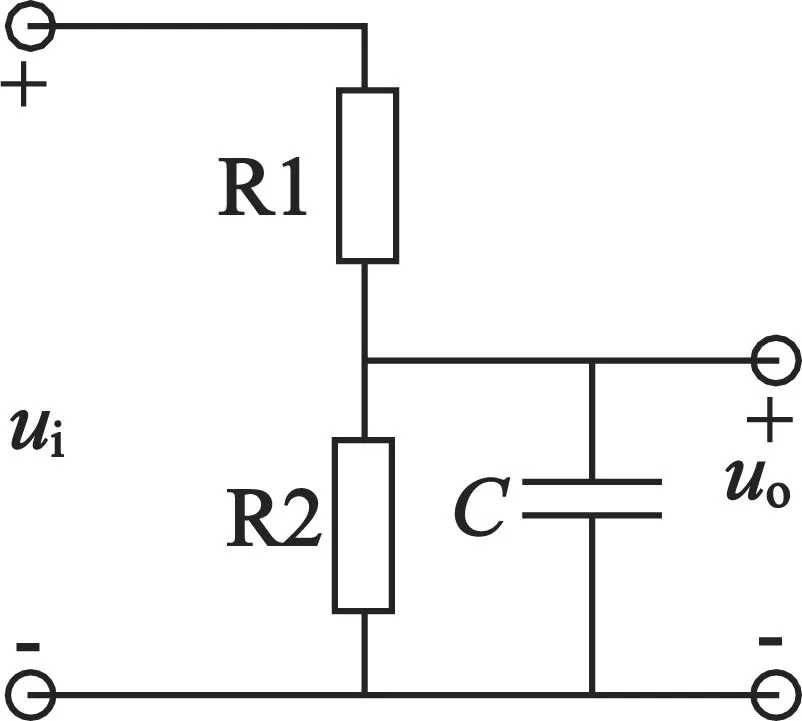
图4 低通滤波电路
在计算反电动势时,线电压经低通滤波器滤波后会带来相移,该相移可由下式确定。
(12)
对滤波后的线电压根据反电动势和线电压关系式(11)求解反电动势值,得到的反电动势波形如图5所示。对比图5中的理想梯形波反电动势和计算反电动势可发现,计算得到的反电动势波形平顶宽度小。实际反电动势由于气隙磁场分布不均匀等原因,使得实际反电动势平顶宽度也小,接近正弦形式。计算反电动势的过零点时刻要滞后于实际反电动势过零点时刻,这是前文所述的滤波器相移引起,该滞后时间通过软件补偿。

图5 理想梯形波反电动势与计算反电动势波形
观察图5还可以发现,计算反电动势每个周期内均有6个窄脉冲,这是由于换相时刻续流二极管引起的线电压突变所致,突变的时间就是续流二极管导通的时间,即是换相时间。该电压突变会导致计算反电动势出现过零点,但这并不是实际反电动势的过零点。若直接判断过零点,势必会带来误判。
换相时刻(电压突变时刻)下的反电动势变化率要明显大于非换相时刻。为解决换相时刻过零点误判,这里提出一种根据反电动势的变化率不同判断反电势是否真正过零点的检测方法。
在控制系统中每50μs采样一次线电压并计算当前反电动势。根据反电动势的计算值判断是否出现过零点,若否,继续采样线电压;若是,取出前两项反电动势取绝对值,计算反电动势变化率。在检测到过零点时,判断反电动势变化率,若变化率大于设置的阈值,则认为此时刻并不是真正的反电动势过零点,而是反电动势突变;若此时的阈值小于设置阈值,则认为此时刻为反电动势过零点。在判断到反电动势过零点之后,控制系统在反电动势延迟30°电角度后,进入换相状态。控制系统内部按照预先存储的导通开关信号顺序,对控制系统的功率器件发出控制命令。所设计的过零点检测过程程序流程图如图6所示。
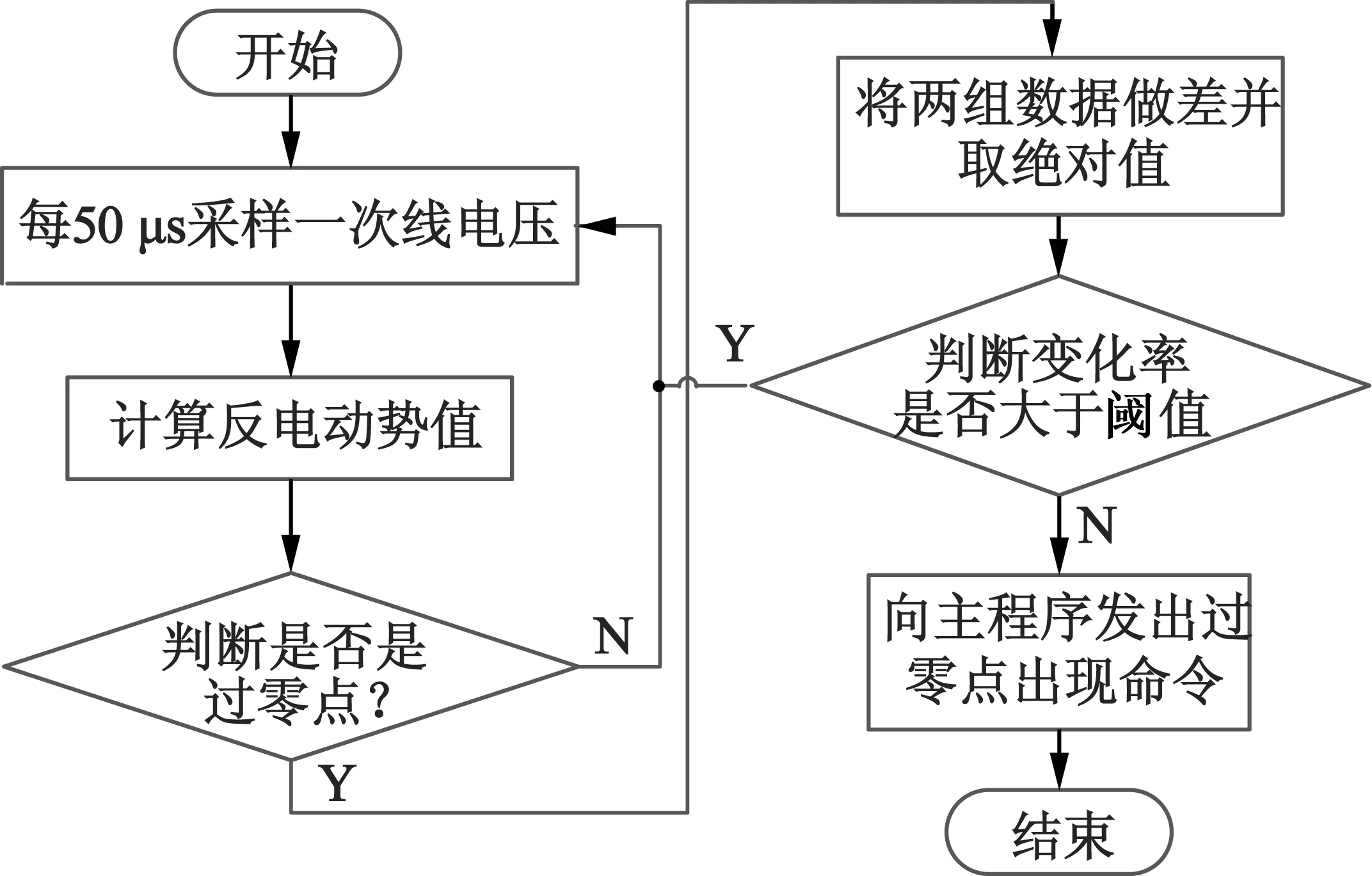
图6 过零点检测程序流程图
按照上述设计思想,首先计算在功率器件导通瞬间引起电压突变时的变化率k1,然后再计算过零点时刻线电压变化率k2,取阈值斜率为(k1+ k2)/2。为验证在负载转矩突变时该方法的可靠性,这里在1ms时突加0.1N·m的转矩负载,电机的相电流和转矩响应如图7所示。
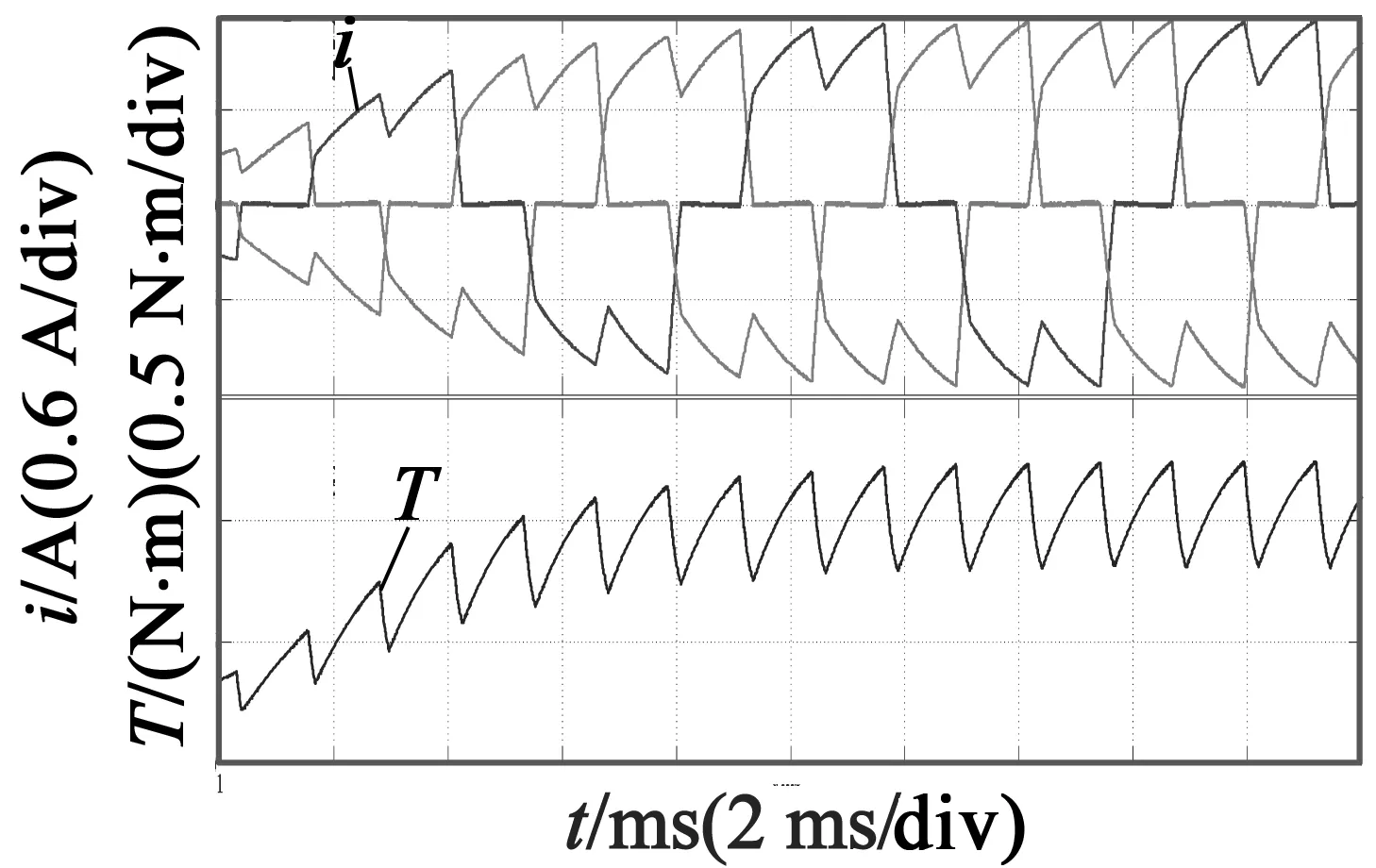
图7 负载转矩突变和恒定下的相电流和转矩响应曲线
图7中,在负载转矩突变和恒定时,相电流没有出现误换相等异常情况,表明该方法在负载突变时仍能准确提供位置信号。图7中的相电流在平顶处有凹陷且转矩波形类似锯齿波,这是由于在换相时刻关断相电流和导通相电流变化速率不一致,引起的非换相相电流脉动,导致换相转矩脉动。
仿真结果表明,该方法在负载转矩恒定和突变时刻没有出现误换相、不换相等异常情况,说明获取的位置信号准确。
3 实验验证
为验证上述分析过程,以32位定点DSPTMS320F2812作为主控芯片,以IR2136S作为功率器件驱动芯片,以一台4对极、星形连接的无刷直流电动机作为被控对象,搭建实验平台。其中DSP的事件管理器模块和模数转换模块可很好满足本实验的要求。本文所提的控制方法需要获取线电压,在驱动电路中,线电压经过电压霍尔传感器采集、滤波送给DSPA/D转换后存储在DSP变量中以调用。
在该实验控制系统中,采用PWM-ON的调速控制方式。线电压采样频率和功率器件开关频率均为20kHz。在负载转矩为0.1N·m情况下,图8分别是在低速600r/min和额定转速2 000r/min时无刷直流电动机相电流波形。
在图8中的相电流波形可以发现,该方法在低速和额定转速下均能平稳运行,无异常情况,实验表明该方法在低速和额定转速均有良好的适应性。

(a)600r/min(b)2000r/min
图8 电机运行时相电流波形


图9 霍尔信号与S-b驱动信号波形图10 S+a驱动信号与S-b驱动信号波形
观察图9、图10,该方法在补偿低通滤波器带来的相移之后,可以准确给出电机的位置信号,滞后时间为数微秒,满足实际使用需求。该方法在额定转速下基本无滞后现象,这是由于采用反电动势的过零点来确定换相时刻,避免了电机在额定转速下由于反电动势达不到平顶宽度而导致换相信号出现滞后的情况。
4 结 语
本文提出一种基于线电压的无位置传感器无刷直流电动机转子位置检测方法。通过在线获取线电压间接观测反电动势,实现当前工况下反电动势过零点检测,达到获取转子位置信号的目标。经实验验证,得以下结论:
1)该方法在全速段负载转矩恒定和突变的时刻均能准确提供位置信号,无误换相、不换相、延迟换相等异常情况,表明该方法有较高的可靠性和实用性。
2)该方法仅需采集线电压即可给出位置信号,且控制软件通过求和运算就可给出反电动势计算值。在硬件上仅增加线电压检测模块,软件上对CPU消耗小,易于实现,具有较强的实用价值。
[1]CHUNT-W,TRANQ-V,LEEH-H,etal.SensorlesscontrolofBLDCmotordriveforanautomotivefuelpumpusingahysteresiscomparator[J].IEEETransactionsonPowerElectronics,2014,29(3):1139-1382 .
[2] 朱俊杰,粟梅,陈程,等.无刷直流电动机反电势过零检测新方法[J].仪器仪表学报,2013,34(2):441-447.
[3] 李志强,夏长亮,陈炜,等.基于线反电动势的无刷直流电动机无位置传感器控制[J].电工技术学报,2010(7):38-44.
[4] 胡延奇,范永坤,熊皑,等.一种新的无刷直流电动机反电动势检测方法[J].微电机,2015,48(2):49-53,61.
[5] 陈华锋,宋辉,王占强,等.一种改进的无刷直流电动机控制方法[J].电机与控制应用,2015(1):28-35.
[6] LIN Y-S,LIN K.Novel back-EMF detection technique of brushless DC motor drives for wide range control without using current and position sensors[J].IEEE Transactions on Power Electronics,2008,23(2):934-940.
[7] LAI Y-S,LIN Y-K.A unified approach to zero-crossing point detection of back EMF for brushless DC motor drives without current and hall sensors[J].IEEE Transactions on Power Electronics,2011,26(6):1704-1713.
[8] 毕强,江亮,羊彦,等.基于XC164CM的无传感器无刷直流电动机控制方法[J].微特电机,2007,35(3):22-24,42.
[9] 邓攀登,陈永军,徐璐,等.低速电动汽车用无刷直流电动机控制系统[J].微电机,2015,48(3):67-70,84.
[10] 董富红,杨春生,王辉.无位置传感器无刷直流电动机磁链函数控制方法[J].微电机,2006,39(6):26-27,41.
[11] 潘雷,孙鹤旭,王贝贝,等.基于单神经元自适应PID的无刷直流电动机反电势与磁链观测及无位置传感器直接转矩控制[J].电机与控制学报,2014,18(5):69-75.[12] FANG Jiancheng,LI Haitao,HAN Bangcheng.Torque ripple reduction in BLDC torque motor with nonideal back EMF[J].IEEE Transactions on Power Electronics,2012,27(11):4630-4637.
A Novel Scheme of Sensing Rotor Position of BLDCM Based on the Line Voltage
YIN Shuai,MA Tie-hua,LÜ Cai-qin
(North University of China,Taiyuan 030051,China)
A novel rotor position detection method based on the line voltage was presented in the sensorless brushless DC motor control problems. Back-EMF was calculated based on the motor winding voltage equation. Thus, the commutation time was defined by sampling the motor line voltage. In order to solve the zero-crossing point problem which was caused by narrow pulse, the method of Back-EMF change rate detection method was proposed based on that the change rate of Back-EMF at commutation time is much larger than the non-commutation time principle. Simulation and experiments show that this method can accurately provide rotor position information and does not appears unusual circumstances such as false commutation at load torque identical and abrupt change situation. This indicates that this method has better adaptability and reliability.
brushless DC motor (BLDCM);position sensorless control;line voltage;back-EMF rate of change
2015-07-10
山西省基础研究计划项目(2013012010);山西省回国留学人员科研资助项目(2014-052)
TM33
A
1004-7018(2016)02-0037-04
殷帅(1988-),男,博士研究生,研究方向为电机及其控制。