基于DSP的开关磁阻电动机角度位置控制
2016-11-30赵涵,王艳
赵 涵,王 艳
(北京交通大学,北京 100044)
基于DSP的开关磁阻电动机角度位置控制
赵 涵,王 艳
(北京交通大学,北京 100044)
开通角、关断角对开关磁阻电动机转矩、效率有较大的影响,因此在开关磁阻电动机调速中角度位置控制尤为重要。制定了不同转速的相通断导通逻辑,针对变角度区对角度精确度的要求,分析了硬件电路实现的缺点,提出了通过软件实现角度控制。以TMS320F2812为控制核心,利用定时器来进行变角度的定时,利用捕获单位捕获三相位置信号作为相中断,编写程序,并进行实验验证。实验结果表明,所提出的角度位置控制方案与理论分析一致,具有较好的效果。
开关磁阻电动机;角度位置控制;TMS320F2812;定时器
0 引 言
开关磁阻电动机(以下简称SRM)是一种新型电机,具有很多优势,如机械结构简单、转矩大、成本低、调速范围宽、运行可靠、效率高等,在电力传动领域发展前景广阔[1]。在角度位置控制方式下,SRM的转矩调节范围大,可以同时导通多相,电机运行效率高[2]。为此,本文以TMS320F2812为控制核心,提出了一种SRM角度位置控制方法。
1 角度控制策略
当电机运行在电动状态时,为避免产生制动转矩,应在电感上升区间开通开关管,使电流位于在电感上升区。电机低速运行时,旋转电动势较小,电流峰值较大,常采用电流斩波峰值,不进行变角度控制,采用触发导通逻辑[3]。触发导通逻辑在电感最小值处开通,在电感最大值处关断。在转速增大时,电流上升时间会缩短,电流幅值减小,对电机出力有影响;并且电流下降时间也会变短,如果在电感达到最大时才关断开关管,电流很可能在电感下降区仍存在,产生制动转矩。因此,当转速较大时,进行变角度控制,提前开通和关断开关管。当速度升高到一定程度时,开通角和关断角的调节都达到极限,此时采用定角度控制。本文主要讨论变角度区域的实现方法,触发导通区和定角度区分别是变角度区控制的两个极限。
图1是位置信号与电感曲线关系图,1~6代表电机的6种位置状态:101、001、011、010、110、100[4-5]。A,B,C三相位置信号各差15°,各相位置信号高电平对应电感下降区间,位置信号低电平对应电感上升区间,各相位置信号的周期均为45°。
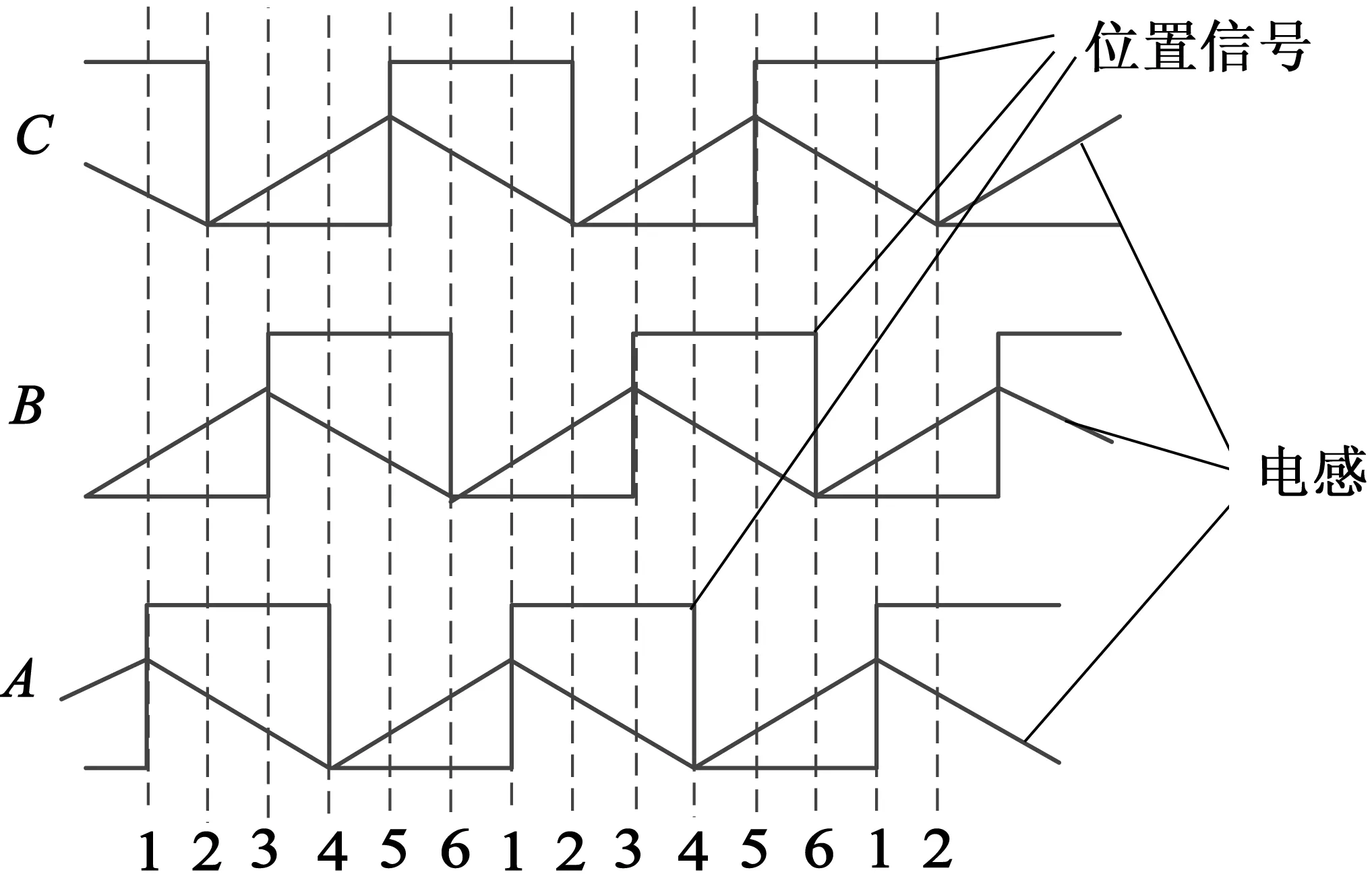
图1 位置信号与电感曲线关系图
当电机转速处于变角度区时,开通角和关断角需提前,即在位置信号负跳变之前就导通开关管,在位置信号正跳变之前关断开关管。以图1为例,在C相位置信号正跳变时,就要进行B相开通计时,同时进行A相关断计时。开通角θon向着-7.5°提前,而关断角θoff向着7.5°提前[6-7]。其导通逻辑如表1所示。
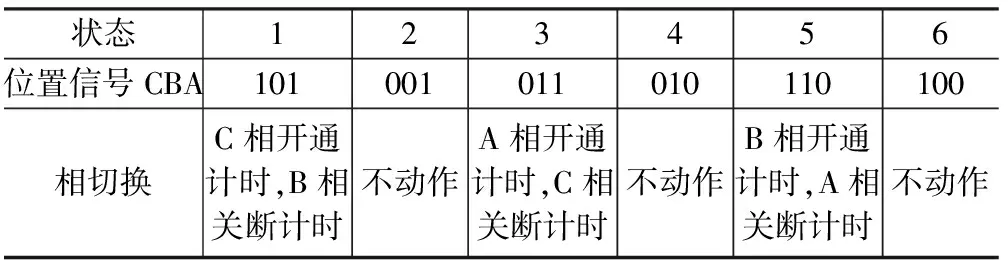
表1 变角度区导通逻辑与位置状态对应规律
2 变角度控制方法
变角度控制是要将开关管的开通角和关断角提前一定角度,其实现需要获取电机角速度,且对角度分辨率要求较高。目前常用的方法是通过CD4046和CD4040组成锁相倍频电路,将输入的位置信号进行细分,再将细分后的脉冲信号用作定时器的时钟脉冲,用定时器来计数脉冲数[8]。但其属于通过硬件电路实现,易受外界干扰,导致倍频后的信号不稳定,实时性较差;并且为了得到较好的倍频效果,需要限制输入信号的频率范围及倍频倍数范围[9-10]。
本文将利用计数角度脉冲实现变角度控制改为利用定时的方法来实现,采用TMS320F2812的T2定时器进行定时。电机提前的角度可以由转速计算方法获取,开通关断角的定时计算方法在下文给出。
由前文可知,开通角、关断角提前的角度与转速有关,转速越高,提前的角度越大。这里将开通关断角提前的角度与转速的关系等效简化为线性关系,如下:

(1)
式中:K,C为常数,设变角度的区间为(n1,n2),则其对应的提前的角度为(θ1,θ2),θ2<θ1。
定时器T2的频率为f,设定工作在连续增模式下,则θ所对应的计数值如下:
(2)
3 软件实现
3.1 开通关断角定时程序
将电机三相位置信号分别输入到DSP的三个捕获引脚,上升下降沿均捕获,每隔7.5°便会得到一个捕获中断,用于相切换的计时起点,由设定可得,关断角总大于开通角,且两者定时起点相同,这里采用将开通角和关断角分别送入同一个定时器的比较中断和周期中断来实现两个角度的定时,可以节省DSP的资源。流程图如图2(a)所示。
3.2 相通断程序
相通断程序是在开通角和关断角定时到达之后,结合位置信号来输出相应的控制信号。相开通程序流程图如图2(b)所示,相关断程序如图2(c)所示。

(a) 开通关断角定时程序 (b) 相开通程序 (c) 相关断程序
4 实验结果及分析
三相位置信号分别输入捕获口,相当于将三相位置信号异或。由于实验条件的限制,本文利用信号发生器输出的方波来模拟三相位置异或信号,通过TMS320F2812的开发板来进行实验。
图3为500r/min时的输出信号波形图。图3中下面为三相位置异或信号,上面为B相输出信号脉冲,可以看出,开通信号和关断信号均提前了一定角度,与前面分析一致。
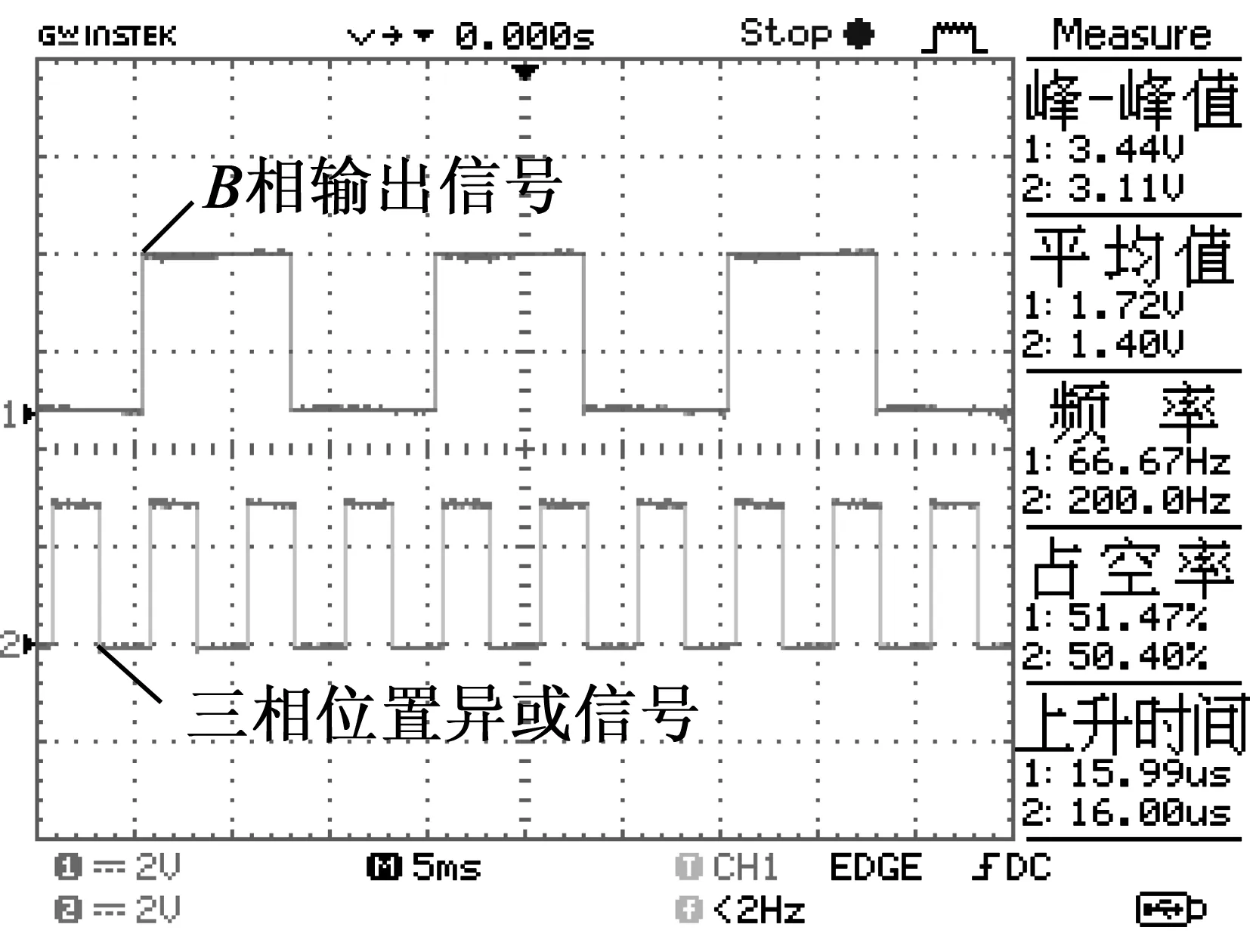
图3 500 r/min时输出信号波形(截图)
图4为3 000r/min的B相输出信号和三相异或信号波形图。从图4中可以看出,开通角和关断角提前动作,且与图3相比,提前的角度变大,与理论分析一致。
图5中,上面波形下降沿为开通时刻,下面波形的下降沿为定时开始时刻,两者之间的角度差经换算与所设定的开通角相等,实验结果正确。
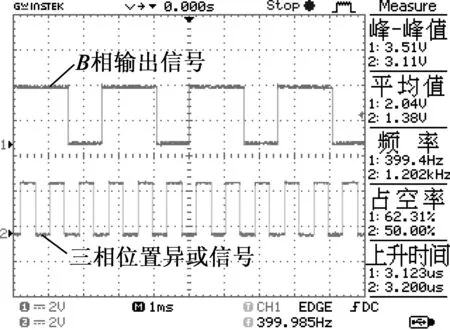
图4 3 000 r/min时输出信号波形(截图)

图5 3 000 r/min时开通角与位置信号(截图)
5 结 语
本文设计了SRM的角度位置控制方案,利用DSP进行软件编程实现,并进行了实验,实验结果与理论分析一致。本方案开通关断角的提前动作是通过转速来进行定时实现的,因此对转速的计算准确性和实时性要求较高,设计时应注意测速方法的选取,保证测速精度。
[1] LAWRENSON P J.Variable-speed switched reluctance motors[J].IEE Proc.1980,127(4):7-10.
[2] 吴红星.开关磁阻电机系统理论与控制技术[M].北京:中国电力出版社,2010.
[3] 陈新红.开关磁阻电机调速算法仿真与研究[D].北京:北京交通大学,2009.
[4] 吴斌.基于外转子式SRD电动轮控制系统设计[D].北京:北京交通大学,2011.
[5] 迟瑞娟.基于CAN总线的电动汽车网络性能的仿真与分析 [D].北京:中国农业大学,2006.
[6] 吕海臣.基于SRM电动汽车驱动系统的研制[D].北京:北京交通大学,2007.
[7] 甘醇.开关磁阻电机新型功率变换器的研究与设计[J].电机与控制应用,2011,38(3):12-16.
[8] 李永霞,周宁,白连平.开关磁阻电机控制中的角度细分[J].微电机,2010,43(10):18-20.
[9] 秦亚龙.SRD系统控制器的设计与实现[D].北京:北京交通大学,2007.
[10] 焦阳.基于DSP的开关磁阻电机数字化控制系统的研究与实现[D].北京:北京交通大学,2006.
Angle Position Control of Switched Reluctance Motor Based on DSP
ZHAO Han,WANG Yan
(Beijing Jiaotong University,Beijing 100044,China)
Turn-on and turn-off angle are important factors influencing the characteristics of the switched reluctance motor, such as torque and efficiency, so angle position control is needed for the switched reluctance drive. This paper formulated the logics of phase connection and break with different speed. Aiming at the requirement of precise angle division in the variable-angle area, the disadvantage of hardware circuit was analyzed, an angle position control method realized by software was introduced. This system used TMS320F2812 as its control core, realized timing in variable-angle area by DSP Timer, and captured three phase position signals as phase interrupt with DSP capture unit. Programs were written and experiment was done. The experiment result proves that the angle position control scheme this paper introduced is in accord with theory analysis and effective.
switched reluctance motor (SRM); angle position control; TMS320F2812; timer
2015-04-20
TM352
A
1004-7018(2016)02-0078-02
赵涵(1990-),女,硕士研究生,研究方向为电力电子与电气传动。