国产搬运机器人在国产汽车冲压生产线中的应用
2016-11-29叶爱萍张少伟谢卫林林志强
贾 沛,叶爱萍,张少伟,谢卫林,林志强
(1.北京机械工业自动化研究所,北京 100120;2.广州汽车集团乘用车有限公司,广州 511434;3.广州数控设备有限公司,广州 510165)
国产搬运机器人在国产汽车冲压生产线中的应用
贾 沛1,叶爱萍1,张少伟2,谢卫林2,林志强3
(1.北京机械工业自动化研究所,北京 100120;2.广州汽车集团乘用车有限公司,广州 511434;3.广州数控设备有限公司,广州 510165)
主要从项目实际出发,介绍广汽乘用车生产线上国产搬运机器人的应用情况,着重从国产机器人性能及完成的功能等方面展开详细介绍,并对国产机器人关键技术进行介绍,最后通过国产机器人和进口机器人的对比指出国产机器人在汽车生产线中存在的不足,为国产机器人改进提供部分依据。
国产机器人;机器视觉;搬运;装车
0 引言
由于我国近年来人力成本不断提高,导致了很多企业招工难的问题越来越突出;同时为了提高工作效率和提高产品品质,越来越多的生产厂家采用工业机器人替代人工完成生产任务。工业机器人自上世纪60年代问世以来,在各种应用上已经发展的较为成熟,我国从1986年第一次开始在生产中使用工业机器人,直到现在,我国的绝大多数行业中都有工业机器人的应用,但其中80%以上采用了进口机器人。目前国外工业机器人的四大供应商分别为瑞士ABB、日本FANUC、日本YASKAWA以及德国KUKA。国内逐步走向成熟的机器人厂家有广州数控、沈阳新松、南京埃斯顿、安徽埃夫特等。由于大部分的国产机器人的核心部件都依靠进口,另外我国机器人的研发起步较晚,导致目前国产机器人的功能及稳定性等方面与国外机器人相比仍存在一定的差距。
随着我国经济的不断稳步发展,未来几年国内市场对机器人需求量会不断增长。根据国际机器人联合会预测,到2016年,中国工业机器人保有量有望超过13万台,同时也成为全球需求最大的工业机器人市场[1]。但是各种工业使用环境对机器人的要求是在完成相应功能的基础上,须保证系统稳定性高,故障越少越好,如果出现故障需要及时找到原因并及时解决。这些需求无疑对国产机器人的发展应用提出了更高的要求。因此,国产机器人必须要抓住各种契机,通过大量投入应用,不断地完善创新,从而实现替代进口,降低企业制造成本的目标。
为提升国产机器人发展水平,在2010年国务院将高端智能装备制造列为七大战略性新兴产业之一,其中明确工业机器人是重点发展方向。在这种环境下,同时针对国产品牌汽车覆盖件高效制造的需要,我们在“高档数控机床与基础制造装备”重大专项支持开发的国产伺服及机械压力机智能化冲压应用示范生产线中使用国产机器人完成轿车冲压覆盖件的搬运码垛,下面将详细介绍国产机器人在广汽汽车覆盖件冲压生产线上的具体应用。
1 国产机器人搬运及装箱系统
国产机器人搬运及装箱系统是广汽轿车覆盖件冲压生产示范线(如图1所示)线尾的冲压件的搬运装车及配套输送系统,主要是将生产线冲压完的汽车覆盖件通过人工打磨并判断是否合格,通过传送带和机器人配合完成合格品和不合格品的装箱及输送,具体描述如下。
1)工件由压机Press5制造完成后,经ABB下料机器人R61取件后根据需要放到线尾的双向皮带机上(一个方向输送到人工装箱皮带线,另一个方向输送到自动装箱皮带线),如需自动装箱,则设置双向皮带机方向为自动装箱状态,并通过一条弯道皮带线输送到一条直线皮带线(皮带线速度恒定且正常情况下不暂停)。质检工人在零件输送过程中完成零件打磨和质检,并按下相应按钮给出是否合格信号,系统得到信号后协调1~4号国产机器人去准备,等待视觉系统对零件进行线上位置和方向确定好后,做相应的姿态调整,并在适当的位置进行工件的在线抓取,抓取零件后放置到相应的台车上,从而完成机器人自动搬运和装车。
2)装车完成后,系统自动进行声光提示,提醒操作工完成满车的叉取和空车的更换,空车更换完毕后系统进入新的装车循环。
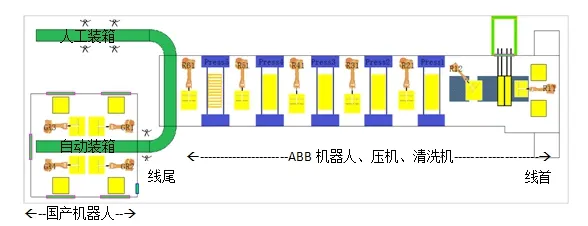
图1 广汽汽车生产线整线布局图
1.1系统构成
国产机器人搬运及装箱系统由4台国产6轴搬运机器人、配套的机器视觉系统、输送皮带线、安全围栏、安全升降门和相应的控制系统组成。
1.2广数RB165机器人
系统中所采用广州数控设备有限公司自出研发生产的RB165型工业机器人,其机器人控制器、伺服电机和伺服驱动等关键功能部件均由广数自主生产,该机器人主要应用于打磨、抛光、机床上下料、冲压自动化生产线的自动搬运等。
通过分析项目需求和性能指标,在选取机器人时分别调研了广州数控和进口机器人的基本情况,整理得到国内机器人与进口厂家机器人的对比信息表,如表1所示。
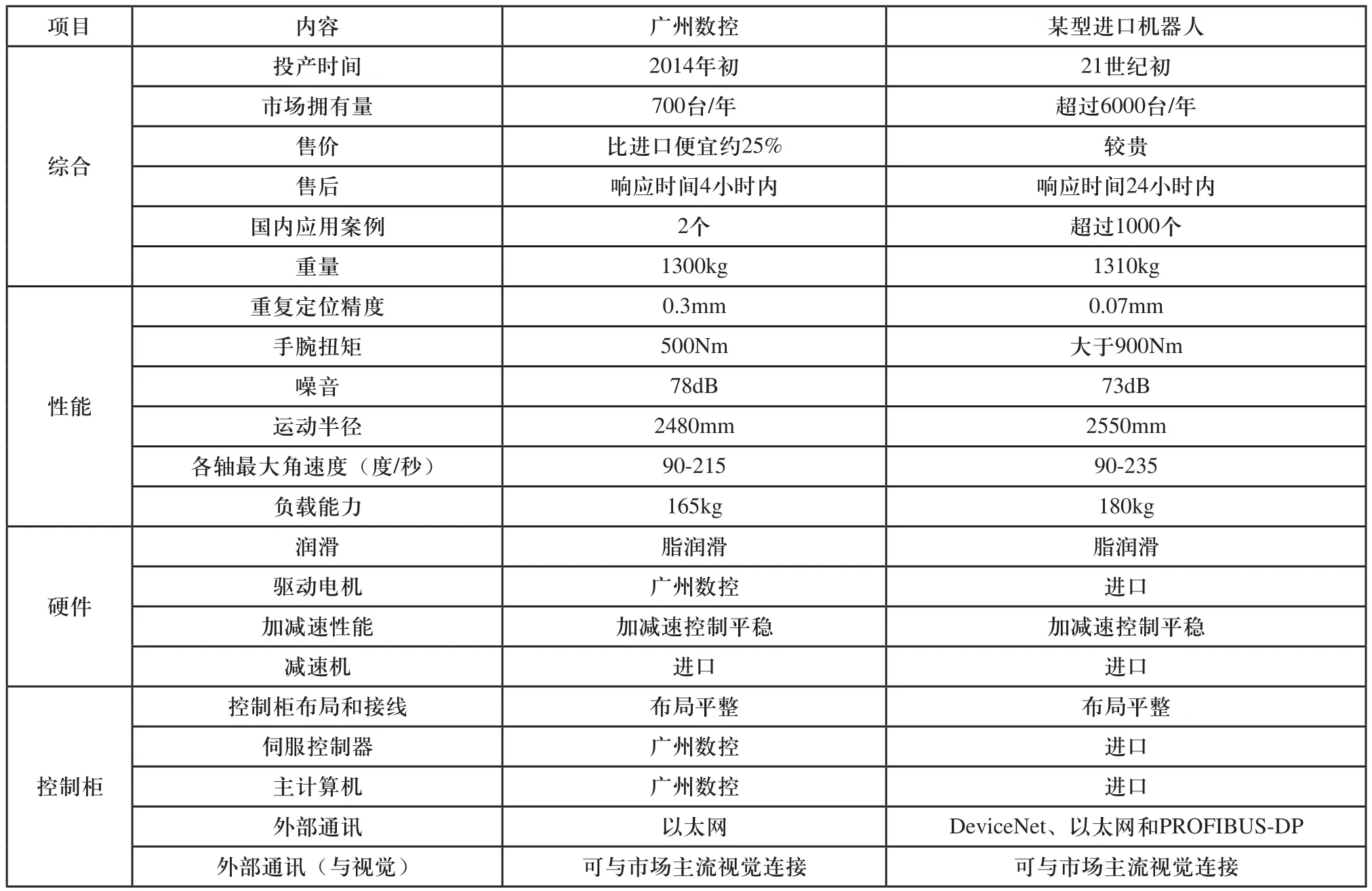
表1 国产及进口机器人对比信息表
通过综合比较,我们可以看到国产机器人虽然价格比进口机器人便宜,但在性能仍有一定差距。我们最终选用的广州数控生产的RB165机器人,如图2所示。目前这款机器人的90%以上关键部件、机器人控制系统、机器人伺服电机及驱动等已经实现自主研发生产,只有RV减速机现靠日本进口,但目前也在自主研发生产RV减速器,已经配在部分机型上使用,效果较理想。

图2 广数RB165机器人图示
1.3控制系统
RB165机器人的伺服驱动电机采用了广数自主研发的交流伺服电机,并在机器人设计中研究了转矩波动和动态时间响应参数等关键技术[2]。
1.4皮带机控制系统
弯道和直道皮带机均采用国产皮带机,其运行速度为10~45米/分钟可调,皮带机尾部设置移动式钣金台,尺寸为2290mm×1800mm×950mm(长×宽×高),用于零件线尾搬运,皮带机高度为1000mm,可调范围为±100mm。皮带线具备启动、停止功能,同时可以根据压机的生产节拍来调节皮带线传送速度,配合机器人和视觉来移动抓取工件。

图3 RB165机器人控制系统组成
1.5视觉跟踪抓取系统
由于本系统中的机器人视觉系统采用两套康耐视(Cognex)的In-Sight5403视觉系统完成图像采集、视觉处理和工件跟踪定位,每两台机器人通过工业以太网共用一套视觉系统。视觉系统的静态分辨率为1600×1200,位深为256个灰度级别,内置两个高速输出,同时支持TCP/IP协议和RS-232C协议通信,在使用以太网连接时,可以通过网络交换机连接多个设备,便于与机器人进行通信。图4为康奈视In-sight浏览器软件对5403进行配置的界面示意。

图4 通过In-sight浏览器软件配置5403
1.6端拾器设计
本系统中要求4台机器人端拾器规格完全一样,采用真空吸件方式,端拾器上预留气管接口,并配有真空检测及显示,并且和整个系统连锁。由于汽车覆盖件多种多样,且不规则,表面凹凸不平,所以机器人端拾器的设计需要根据各种冲压件的外貌进行支架的长短和方向的细微调整。每套端拾器包含两套真空发生器及8套真空吸盘。图5为系统中所用端拾器的三维设计模型示意。

图5 机器人端拾器3D设计模型
1.7系统工作流程
按照要求,四台国产机器人分工合作完成每分钟6~10件的节拍,由皮带机系统、视觉系统和机器人组来配合完成工件的在线抓取和装箱,时序图如图6所示,系统工作流程如下:

图6 国产机器人搬运及装箱系统时序图
如果皮带机上检测到有工件且已经到位,则启动视觉控制系统。
视觉控制系统拍照并识别后进入控制系统。
如果工件是合格品,则通知1、2号机器人组,并返回各自的空闲状态信息。如果1、2号机器人至少有一个空闲,则发出指令指定其中一个机器人准备姿态调整和适时抓取;机器人接到任务指令,启动工作,进入相应工作程序,工作程序完成后,返回给控制系统完成信息,并更新自己状态为空闲;如果1、2号机器人都忙,则使用3、4号机器人辅助抓取,机器人接到任务指令,启动工作,进入相应工作程序,工作程序完成后,返回给控制系统完成信息,并更新自己状态为空闲。
如果工件是不合格品,则通知3、4号机器人组,并返回各自的空闲状态信息;如果3、4号机器人至少有一个空闲,则发出指令指定其中一个机器人准备姿态调整和适时抓取;机器人接到任务指令,启动工作,进入相应工作程序。工作程序完成后,返回给控制系统完成信息,并更新自己状态为空闲;如果3、4号机器人都忙,则人工辅助完成搬运和装箱。
2 关键技术解析
项目中机器人抓取成功与否的关键在于机器人与视觉系统的协同定位,在项目中视觉系统要完成工件的精确定位,主要存在以下问题:1)抓取的工件尺寸规格比较大,超过了1000mm×1500mm,同时工件的形状比较复杂;2)工件到达抓取工位前,需要通过一条半径3500mm的90°的转弯皮带机,工件在转向后的位姿偏差较大;3)工件运行速度较快,正常工作时超过25米/分钟;4)由于现场工作空间限制,导致机器人抓取工件后姿态调整幅度较大。
通过对以上问题进行分析后最终选取了康奈视的5403相机和25mm的镜头,设定工作距离大于2400mm,在机器人抓取工位前安装有一套对射传感器,作为视觉定位的触发信号。测试前对视觉系统需设置工件图像捕捉、机器视觉与机器人的坐标标定等工作,另外在现场联调时还需要根据实际情况完成机器人坐标系进行矫正、工件图像角度补偿,最终完成了工件的准确抓取。
3 结束语
工业机器人市场竞争越来越激烈,中国制造业面临着与国际接轨,参与国际分工的巨大挑战[3]。国产机器人在整体性能上与国际水平存在一定的差距,在核心技术的创新方面严重依赖进口,这无疑给国产机器人发展带来较大的阻力。为此,国产机器人需要在控制器、减速机等关键部件上加大自主研发力度,在提高整体性能的基础上,不断降低成本,减少与国外机器人之间的综合差距,从而不断抵制国外机器人占据国内市场的现象,充分发展中国本土化制造业,从而在世界制造业中博得一席之地。
[1] 郭纪斌.国产工业机器人现状和发展趋势研究[J].中国科技纵横,2015,(10):206-206,208.
[2] 刘洋洋.广数机器人专用伺服电机技术分析[J].机电信息,2015,(12):93-94.
[3] 汤嘉荣.浅析我国工业机器人的发展与研究[J].科技创新与应用,2012,(32):94.
Application of domestic moving robot in automobile production line
JIA Pei1, YE Ai-ping1, ZHANG Shao-wei2, XIE Wei-lin2, LIN Zhi-qiang3
TP249
A
1009-0134(2016)02-0071-04
2015-12-17
国家科技重大专项资助
贾沛(1975 -),男,高级工程师,本科,研究方向为自动化技术应用。
