基于坐标变换的装配过程仿真视角优化方法
2016-11-29吴江珑赵东平
吴江珑,赵东平
(1.中航飞机汉中飞机分公司,汉中 723000;2.西北工业大学 机电学院,西安 710072)
基于坐标变换的装配过程仿真视角优化方法
吴江珑1,赵东平2
(1.中航飞机汉中飞机分公司,汉中 723000;2.西北工业大学 机电学院,西安 710072)
为了提高装配过程仿真的可读性和展示效果,提出了基于坐标变换的装配过程仿真视角优化方法。根据装配过程仿真的特点,给出了仿真视角的评价准则。研究了三维图形的坐标变换原理,通过包含装配路径和视角评价准则信息的视角变换矩阵,实现了装配仿真过程中视角坐标的变换。建立了基于视角变换的装配过程仿真优化流程,并讨论了仿真运动的速度和加速度对装配仿真展示结果的影响。基于在DELMIA DPM平台开发了视角调整功能,以飞机翼盒装配过程仿真优化为例,验证了所提方法的有效性。
装配过程仿真;坐标变换;视角优化
0 引言
装配过程仿真作为飞机数字化装配工艺设计的关键环节[1],能够在工艺设计阶段发现装配过程中存在的不协调、干涉、碰撞等问题,并在装配生产前进行反馈解决,以减少装配返工,提高一次装配成功率[2,3]。
随着计算机图形学和仿真技术的发展,通过装配仿真技术构建不同的变换视图来展示装配件仿真运动和特定位置的研究已趋于成熟[4,5]。装配过程仿真视图变换包括三维模型变换和虚拟摄像机视角变换[6]。三维模型变换是在装配工艺设计完成即零部件装配路径确定后,从便于计算机运算的角度出发,在仿真运动路径及其关键点上建立变换视图,如姜丽萍等人[7]从分层级装配场景、多量级轻量化模型和变分辨率装配仿真三方面出发,提出了基于轻量化模型的虚拟仿真技术,降低了飞机装配仿真对计算机硬件的性能要求,提高了装配仿真的效率。但基于三维模型变换的仿真视图并没有考虑到观察人员的视角,常常出现观察人员无法感知零部件在纵深方向的移动过程等问题,导致装配过程仿真动画可读性差,不能有效地指导实际装配。
目前的装配过程仿真中忽略了视角变换的重要性,针对这一问题提出基于坐标变换的装配过程仿真视角优化方法。在给出装配过程仿真评价准则的基础上,研究了装配过程视角变换方法,构建了基于坐标变换的装配过程仿真视角优化应用流程。
1 面向装配仿真的视角评价准则
在三维场景观察装配仿真时,由于视角选择的不同,所获得的视图存在差异。有些视图使装配过程能较好地被理解,而有些视图则理解困难。由于视图和视角的映射关系,造成视图上的差异反映到视角上存在优劣差异。综合起来,装配仿真过程中视角的评价因素主要有以下四个方面:
1)反映配合关系。是否能够观察到装配过程具有配合关系的特征,以及完成配合特征装配的全过程。
2)反映装配路径。是否能够清晰地观察到该视角范围内完整的装配路径,不出现因零部件在纵深方向移动带来的视觉误差。
3)整体识别性。是否能够观察到装配场景中与装配过程有关的尽可能多的特征,从而对场景产生一个整体的认识。
4)符合人的观察习惯。人在观察三维物体时,习惯于采用一些固定的视角作为观察点,如Three-quarter视角。Three-quarter视角是指三维物体包围盒的八个顶点处的视角,如图1所示。

图1 多视角对应的场景变化
综合上述评价因素,从指导装配生产实际出发可得出,好的视角必须能够观察到该装配过程有配合关系的特征,避免纵深方向的装配路径。在充分考虑人的观察习惯前提下,提高对装配过程的整体识别性,并兼顾美学标准。
2 视角变换方法
在装配过程仿真中需要进行三维模型变换和视角变换才能实现产品装配过程的有效表达,其中三维模型变换主要用于装配路径规划,而视角变换主要用于装配仿真过程展示。视角变换的主要任务是在多坐标空间中实现对视角坐标的变换。多坐标空间视角变换涉及到如下三种坐标空间,如图2所示。
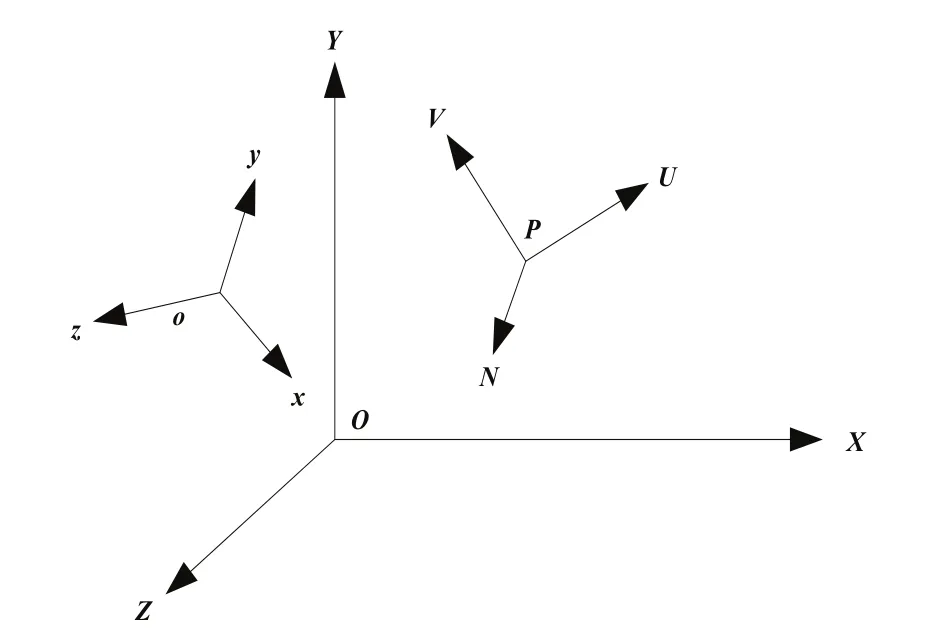
图2 三种坐标空间之间的关系
1)世界坐标空间,即欧氏空间,该空间用来表示产品零部件在场景中的绝对位置,如图2中的OXYZ坐标系。
2)视角坐标空间,又称为摄像机坐标空间,用来指定视角位置和视线方向,表示观察者和模型之间的相对位置关系,如图2中的PUVN坐标系。
3)模型坐标空间,又称为图像坐标空间,表示模型之间的相对位置,如图2所示的oxyz坐标系。
2.1三维图形变换
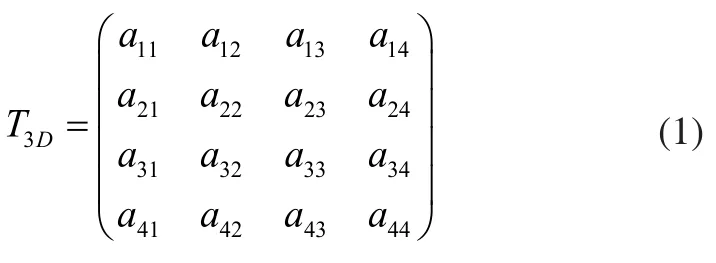
约定三维世界坐标系为右旋坐标系,则三维空间中任意一点的齐次坐标可用四维向量来表示,其坐标变换矩阵T3D为4×4矩阵,如下式所示。

平移变换的矩阵变换为:
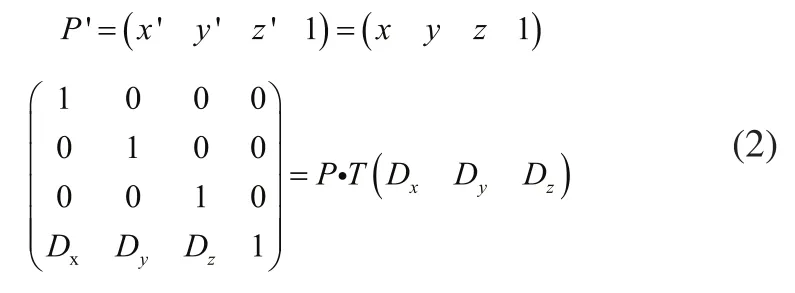
式中,Dx、Dy、Dz分别是沿x轴、y轴、z轴方向上的平移量。三维图形平移变换如图3所示。

图3 三维平移变换
比例变换的矩阵变换为:

式中,Sx、Sy、Sz分别是以坐标原点为参考点,沿x轴、y轴、z轴方向上的放缩比例。以坐标原点为参考点的三维图形比例变换如图4所示。

图4 以原点为参考点的三维比例变换
若以三维空间中的任意一点(x0,y0,z0)为参考点作比例变换,只需先平移至原点作比例变换,再平移回点(x0,y0,z0),此时变换矩阵为:
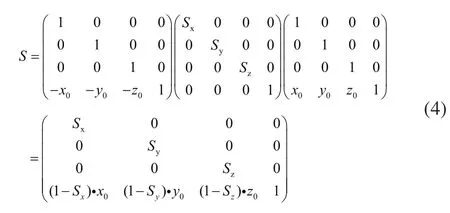
以任意点(x0,y0,z0)为参考点的比例变换过程如图5所示。
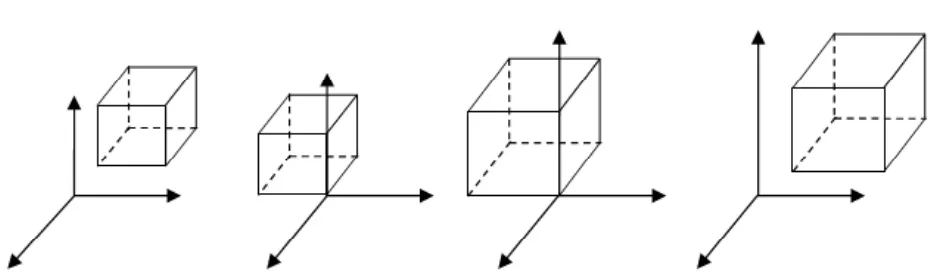
图5 以任意点为参考点的三维比例变换
三维旋转变换为分别绕三个坐标轴的旋转变换,即绕x轴旋转、绕y轴旋转和绕z轴旋转变换。旋转的正方向按右手法则确定,即面向旋转变换所绕坐标轴的正方向看,逆时针方向为旋转的正方向,如图6所示。

图6 绕三个轴旋转的正方向
三维图形绕x轴旋转时,所有x坐标值均不变化,而y和z坐标值变化,与在z=0平面上绕原点的旋转变换相同。设坐标空间中任意一点(x,y,z)绕x轴旋转θ角变为(x’,y’,z’),则绕x轴旋转的变换矩阵为:

式中,θ为图形绕x轴旋转的角度。
同理得到绕y轴和绕z轴旋转的变换矩阵分别为:

式中,θ为图形绕y轴或z轴旋转的角度。
与二维图形几何变换相似,三维几何变换均可通过平移、比例、旋转三种基本变换的组合来实现。以任意直线的旋转变换为例,可通过以下步骤实现以过坐标原点的任意直线为旋转轴的旋转变换。
Setp1:做绕x轴旋转α角的变换Rx(α),使旋转轴落在y=0的平面上;
Setp2:做绕y轴旋转β角的变换Ry(β),使旋转轴与z轴重合;
Setp3:做绕z轴旋转θ角的旋转变换;
Setp4:做Setp2的逆变换,即做旋转变换Ry(-β);
Setp5:做Setp1的逆变换,即做旋转变换Rx(-α)。
2.2视角坐标变换
在装配仿真过程中的每个装配操作执行之前,均应对其视角进行优化,以便有效展示装配过程,指导现场装配。视角调整过程即为新的视角坐标系建立过程。视角坐标系的建立主要有以下步骤:
Setp1:在世界坐标系中获取当前待装配零部件的装配路径方向,此方向的垂直方向为视角的最佳视线方向n;
Setp2:结合配合关系的展示和整体识别性,在最佳视线方向上确定视角坐标系原点p;
Setp3:指定一个视线上的方向v;
Setp4:结合方向n和v,确定方向u;
假设视角坐标原点P1移动到P2的平移向量(xP,yP,zP),(nx,ny,nz)、(vx,vy,vz)和(ux,uy,uz)分别为方向向量n、v和u的单位向量。为了实现从P1到P2的变换,引入视角变换矩阵M。

式中,矩阵T是使P1与P2重合的变换矩阵。矩阵R是使P1对应的视角坐标系的三个坐标轴与P2对应的视角坐标系的三个坐标轴同向的旋转矩阵。
在视角坐标系的基础上,可将视角变换原理用图7进行描述。

图7 视角变换原理
装配路径由一系列连续的装配路径线段构成,每条线段的方向、长度均不同。由视角和路径点连接形成的线与装配路径的中垂线之间的夹角为视角范围α。根据人的视力范围限制,视角与路径点之间的距离k也存在一个固定的范围。根据视角的范围α和视线长度k可以动态地生成视角的位置,在这个视角,观察者清晰地观察这段装配路径的全部过程。
3 基于视角变换的装配过程仿真优化
基于视角变换方法建立了装配过程仿真视角优化流程,如图8所示。首先获取起始装配路径R1,利用上述方法进行视角变换,实现对场景的旋转或平移;然后保存该视角对应的视图;再获取下一装配操作的路径Ri+1,完成上述操作,直至装配路径获取完毕。
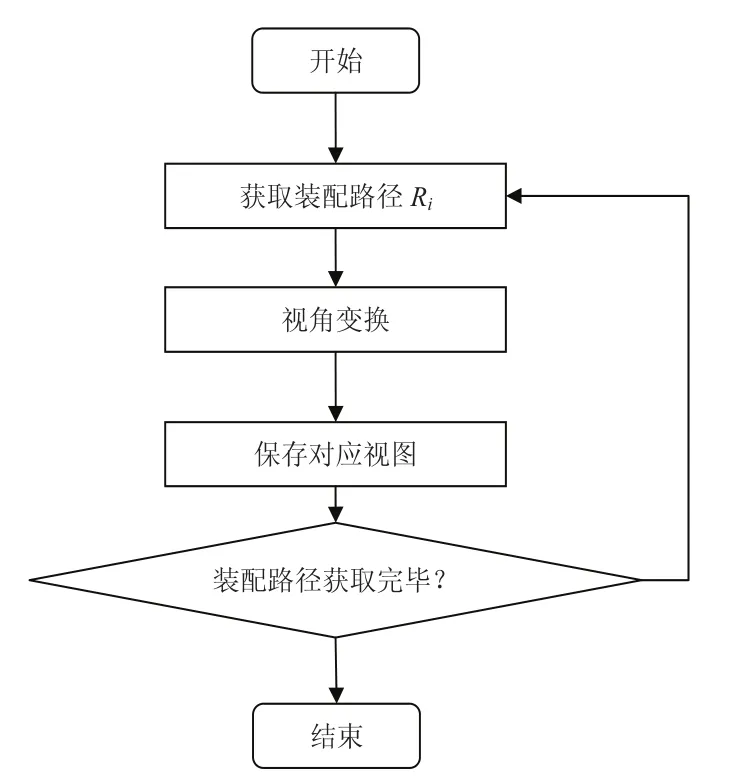
图8 基于视角变换的装配仿真优化流程
当所有的视角调整完毕后,每个视角对应的视图将对装配仿真过程施加影响,即在某装配操作仿真开始之前,场景将自动调整到该装配路径对应的视图状态,并在整个装配操作仿真过程中保持不变。
在视角移动过程中,为了让场景平滑过渡,仿真运动采用摆线运动规律和匀速运动规律相结合的复合运动形式,复合运动的速度和加速度关系如图9所示。将视角平移和视角旋转过程划分为类摆线加速运动阶段S1、匀速运动阶段S2和类摆线减速运动阶段S3。在视角平移和视角旋转过程中始终保证以类摆线加速运动阶段S1开始,以类摆线减速运动阶段S3结束,当移动距离较短时,首先通过缩短匀速运动阶段S2长度实现整体平滑过渡,当S2缩短到一定程度还是不能保证平滑过渡,再减小最大速度vmax。
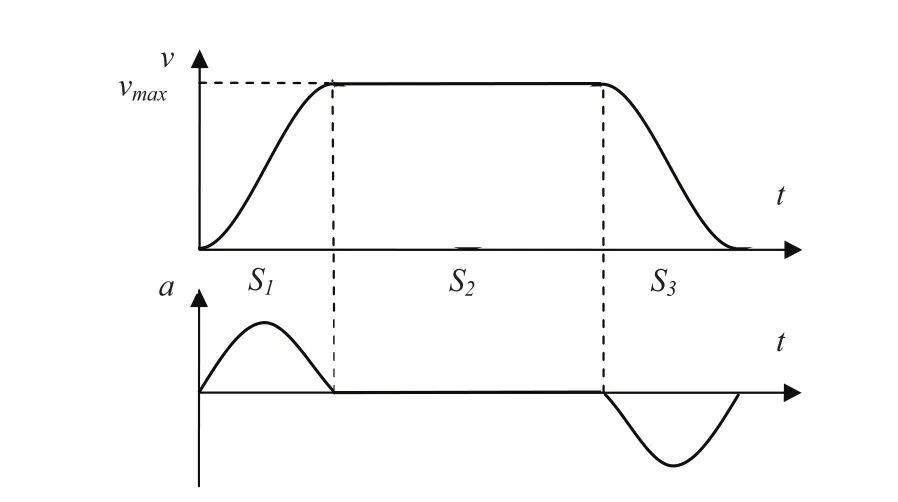
图9 视角变换过程中的速度与加速度
4 应用实例
以飞机翼盒装配过程仿真视角优化为例,在所提方法的基础上,以DELMIA DPM模块为平台,开发了如图10所示的仿真视角调整功能。
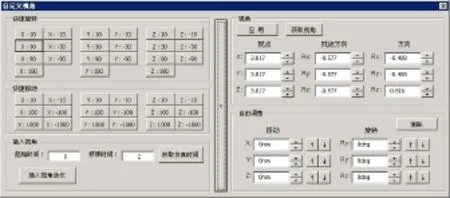
图10 仿真视角调整功能
基于坐标变换的装配仿真视角优化流程,在装配仿真过程中,通过仿真视角调整命令,将视角自动移动到适宜观察仿真运动过程的角度,图11所示为视角优化前后的对比。
【】【】
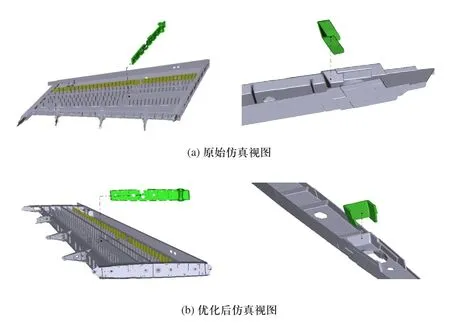
图11 仿真视角优化前后对比
5 结束语
为改善装配过程仿真的真实性和可读性,提出了基于坐标变换的装配过程仿真视角优化方法。从装配过程仿真评价准则出发,研究了三维图形变换和视角坐标变换方法,并构建了装配过程仿真视角优化流程。通过飞机翼盒装配过程仿真视角优化实例,实现了装配过程视角的平滑变换和逼真化显示,提高了装配过程仿真的可读性和真实性。
[1] Zhou X,Qiu Y, Hua G, et al. A feasible approach to the integration of CAD and CAPP[J].Computer-Aided Design,2007,39(4):324-338.
[2] Fazio T L D, Edsall A C, Gustavson R E, et al. A prototype of feature-based design for assembly[J].Lecture Notes in Computer Science,1991,115(4):723-734.
[3] 郭佳,郑伟.装配仿真技术在飞机研制阶段的应用[J].航空制造技术,2014:74-77.
[4] Christiand, Jungwon Yoon,Optimal assembly path planning algorithm for aircraft part maintenance[A].International Conference on Control, Automation and Systems(ICCAS 2007) [C].2007:2190-2194.
[5] Liu J H, Ning R X, Wan B L, et al. Research of Complex Product Assembly Path Planning in Virtual Assembly[J].Journal of System Simulation,2007.
[6] Chryssolouris G,Mavrikios D,Fragos DA.Virtual reality based experimentation environment for the verification of human-related factor in assembly processes[J].Robotics and Computer-Integrated Manufacturing,2000,16:267-276.
[7] 姜丽萍,陈文亮,黄大兴.基于轻量化模型的飞机装配过程虚拟仿真方法[J].航空制造技术,2013:26-29.
A view optimization method for assembly process simulation based on coordinate transformation
WU Jiang-long1, ZHAO Dong-ping2
TP391.7
A
1009-0134(2016)02-0024-05
2015-09-17
吴江珑(1983 -),男,陕西汉中人,硕士研究生,主要从事飞机零部件数字化制造工作。
