基于相似性度量的证据融合改进算法
2016-11-25刘深
刘深
(昆明船舶设备研究试验中心 云南 昆明650051)
基于相似性度量的证据融合改进算法
刘深
(昆明船舶设备研究试验中心 云南 昆明650051)
D-S证据理论作为一种较概率论确定性弱的不确定性推理在多传感器探测网络中有广泛的应用。数据融合算法是分布式探测网络系统中的关键技术之一,可以提高分布式探测网络的探测精度。本文提出了基于证据相似性度量的目标识别融合改进算法,利用证据相似性度量对证据源进行修正,通过对水下不同背景噪声数据进行融合试验表明,经数据融合后,目标识别率可由原来的80%提高到99%,从而证明本文所提出的融合算法可以有效提高目标识别准确率。
D-S证据理论;相似性度量;数据融合;目标识别
水下目标识别是水下目标探测的关键技术之一,也一直是水声信号研究的难点与重点问题之一。分布式探测目标识别系统,使系统结构更加合理并具有互补性或冗余性的同时,提高了信息处理的可靠性和确定性,提高目标的探测识别能力。
在分布式探测系统中,D-S证据理论是常用的目标识别融合算法。D-S证据理论是由A.P.Dempster于1976年提出,后由G.Shafer改进形成的一种具有合并多重证据从而做出决策的不精确推理理论,是决策分析、工程数据融合和逻辑推理等领域的重要方法。用传统的Dempster-Shafer(D-S)组合规则对高冲突证据合成时,很可能得出违背常理的结论。目前对D-S证据理论的修正主要分为两大类:一类是对组合规则进行修正[1-4],另一类则认为组合规则没有问题,而是给出的证据源需要修改[5-7]。
文中研究基于决策级的证据理论的水下目标融合识别算法。提出了基于相似性度量的证据融合改进算法。首先利用证据相似性度量对各条证据进行修正,之后利用融合规则进行融合,最后利用真实水声信号对本方法进行了验证。
1 D-S证据理论
设Θ={Θ1,Θ2,…,ΘN}表示X所有可能取值的论域集合,且所有在Θ内元素是互不相容的,称Θ为X的识别框。证据理论是建立在幂集2Θ={A|A⊆Θ}上的。
1.1 基本信度分配
设Θ是X的识别框架,则函数m:2Θ→[0,1]称为2Θ上的基本信度分配(BPA)函数,如果满足:

其中m(A)表示了对A的直接支持,通常称为A的mass值。对空集Θ分配的基本信度m(Θ)代表了识别框架的不一致性和不完整性。满足m(A)>0的子集A称为焦元,所有焦元的集合F={A|m(A)>0}称为Θ的核。称二元组(F,m)为定义在Θ上的一条证据。
1.2 信度函数与似真函数
设Θ是X的识别框架,函数m:2Θ→[0,1]为Θ上的基本信度分配函数。对任意假设A而言,其信任度bel(A)定义为A中全部子集对应的基本信度之和,即:

bel(A)是表示了对命题A的总信任度。bel:2Θ→R称为Θ上的信任函数。因此,证据理论有时也称为信任函数理论。
命题的似真函数pl:2Θ→[0,1]为:

1.3 融合公式
D-S证据理论提供了一个有用的合成公式,能方便地融合多个证据源提供的证据。设m1和m2是同一识别框Θ上的两个BPA,焦元分别为A1,A2,…,Ak和B1,B2,…,Br,则:

2 基于相似性度量的证据理论改进算法
证据修正组合规则的基本思想是对证据分别赋予不同的权重,与其他证据冲突程度高的证据的权重较小,冲突程度低的权重较大,这样充分考虑了证据的关联性,减弱了“干扰证据”对合成结果的影响,提高了融合结果的合理性和可靠性。确定证据的冲突程度或一致程度就成了证据修正组合的关键。
首先定义证据E的信息容量为e(E)

式中‖Ai‖表示集合基数,g(Al)是集合焦元Al的个数。若m(Ai)=0,e(E)=0;m(Ai)=1,‖Ai‖=1,e(E)=1。
首先利用式(5)对证据源信息进行修正:
设m1和m2是同一识别框Θ上的两个BPA,定义两条证据间的距离d(m1,m2)
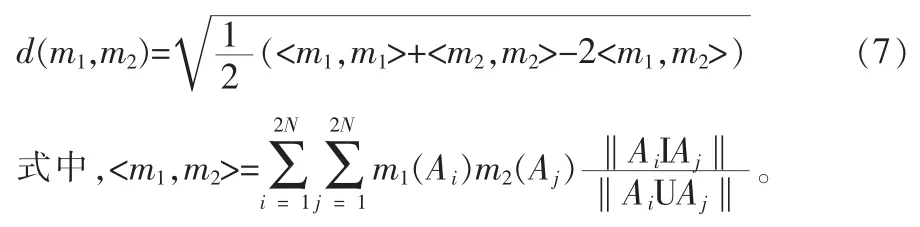
则证据mi和mj的相似度为

设n条证据的一致性矩阵为CM=(CM)n×n,其中CMi,j=S(mi,mj),每条证据的支持度定义为

对每条证据支持度进行归一化,得到

称为证据的权重。
在获得证据的权重后,由下式可计算得加权平均证据:

然后再用D-S证据组合规则对加权证据融合n-1次。从上述可以看出,如果证据和其他证据的一致性高,则它对最后融合结果的影响较大,反之,如果证据和其他证据高度冲突,则它对最后融合结果的影响较小。
3 实测数据实验及结果分析
文中数据融合试验所使用的数据为来自3个不同传感器对检测到的水声信号的分类结果。该分类数据是通过对水下不同背景的A、B、C 3类噪声信号进行特征提取以后,将特征向量输入至分类器得出的结果。
为了真实地模拟不同传感器的分布式布放,本文将从不同地点测得的3类水声信号假设在节点1,节点2和节点3处获得。水声信号在不同节点上的处理过程如本文前述,使用基于IMF能量谱法进行特征提取,提取维数为3维,每类信号提取出40个样本进行分类试验,分类器采用支持向量机分类器。所有试验结果均为多次试验所得。表1~3是对不同信号的单节点识别结果。
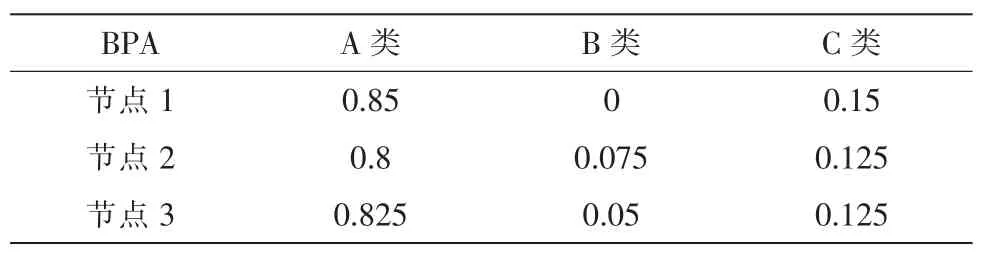
表1 3个节点对A类信号的识别结果

表2 3个节点对B类信号的识别结果
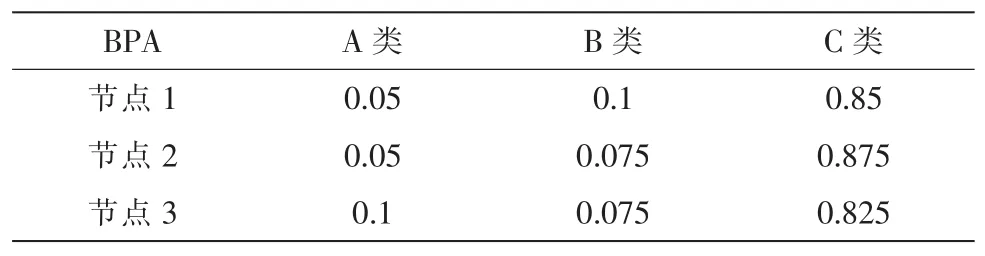
表3 3个节点对C类信号的识别结果
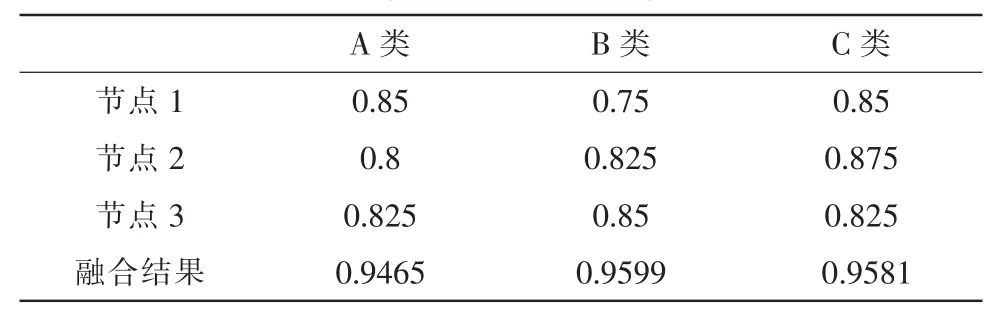
表4 3个节点识别率的融合结果
表4 3个节点识别率的融合结果,由结果可以看出经过数据融合,目标识别率可由原来的80%提高到95%左右,识别率大大提高。
4 结束语
文中主要对D-S证据理论的决策级数据融合进行了介绍,提出了基于模糊集理论和证据相似性度量的证据理论融合算法,并应用于水下目标识别。首先具体介绍了基于模糊集理论和证据相似性度量的证据理论融合算法,之后介绍Pignistic概率转换公式,以及改进的融合模型的具体算法步骤,最后运用实际数据对进行算法了验证,结果表明通过数据融合算法目标识别识别率大大提高。
[1]Lefevre E.Colot O,Vannoorenberghe P.Belief function combination and conflict management[J].Information Fusion,2002,3(3):149-162.
[2]孙全,叶秀清,顾伟康.一种新的基于证据理论的合成公式[J].电子学报,2000,28(8):117-119.
[3]李弼程,王波,魏俊,等.一种有效的证据理论合成公式[J].数据采集与处理,2002,17(1):33-36.
[4]向阳,史习智.证据理论合成规则的一点修正[J].上海交通大学学报,1999,33(3):357-360.
[5]Murphy C K.Combining belief functions when evidence conflicts[J].Decision Support Systems,2000,29(1):1-9.
[6]徐凌宇,尹国成,宫义山,等.基于不同置信度的证据组合规则及应用[J].东北大学学报,2002,23(2):123-125.
[7]梁昌勇,陈增明,黄永青,等.Dempster-Shafer合成法则悖论的一种消除方法[J].系统工程理论与实践,2005(3):7-12.
Evidence Fusion improved algorithm Based on similarity measure
LIU Shen
(Kunming Shipborne Equipment Research and Test Center,Kunming 650051,China)
DS evidence theory as a kind of uncertainty reasoning is widely used in the multi-sensor probe networks,data fusion algorithm is one of the key technologies of distributed detection network system,it can improve the detection accuracy of distributed detection network.This paper presents a target recognition fusion algorithm improvements based on similarity measure,Using evidence similarity measure to correct the source of the evidence.Using different underwater acoustic signals for data fusion experiment show that target recognition rate can be from 80%to 95%after data fusion.Thus proving that the proposed fusion algorithm can effectively improved the accuracy of target identification.
DS evidence theory;similarity measure;data fusion;target recognition
TN911.7
A
1674-6236(2016)18-0019-03
2015-09-08 稿件编号:201509064
刘 深(1988—),男,甘肃天水人,硕士,助理工程师。研究方向:水声信号处理,水声电子设计。