一种强杂波背景下SAR目标超分辨成像方法
2016-11-23景国彬盛佳恋陈溅来孙光才邢孟道
景国彬,盛佳恋,陈溅来,孙光才,邢孟道,保 铮
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071)
一种强杂波背景下SAR目标超分辨成像方法
景国彬,盛佳恋,陈溅来,孙光才,邢孟道,保 铮
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071)
针对合成孔径雷达图像中存在较强杂波,难以提取目标信息和进行分辨率增强处理的问题,提出了一种强杂波背景下的超分辨成像方法.首先,从信号相关性的角度出发,估计杂波自适应门限来提取目标强散射点;然后,结合梯度下降搜索法提取出目标弱散射点;最后,利用提取后的目标散射点在图像域的稀疏性,通过简化的正则化处理方法,对目标进行分辨率增强处理,实现了目标超分辨成像.角反射器和静止的机动车目标实测数据处理的结果验证了文中方法的有效性.
强杂波;合成孔径雷达;目标提取;分辨率增强;超分辨成像
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种高分辨微波成像雷达,与传统的光学成像相比,微波成像不受天气条件的限制,能够全天时、全天候地对目标或场景进行观测.目前,利用SAR图像对战场目标进行自动识别的研究得到了高度重视[1].通常情况下,SAR目标的分辨率越高,自动识别的正确率就越高,因此,对SAR目标进行超分辨处理是非常有必要的[2].然而,机载SAR雷达在工作状态下,天线波束照射范围内地面强散射体的回波会和目标一起通过天线进入到雷达接收机,形成强杂波.在后期处理过程中,如果不对目标进行精确提取,则直接进行分辨率增强处理将引入虚假目标点,会降低目标自动识别的正确率[2].因此,当SAR图像信杂比较低时,对目标进行精确提取处理是非常有必要的.总的来说,目标提取和分辨率增强是目标超分辨处理的两个重要方面.
针对目标提取,文献[3]采用二维恒虚警方法进行处理,此方法针对较稳定的杂波有较明显的抑制作用,但对杂波波动很大的情况将不再适用.文献[2]提出自适应谱估计的方法来提取目标,但其本质上是一种在时间维度上的处理,当目标的多普勒频率接近杂波的中心频率时,目标也被当作杂波抑制掉了.近年来一些空时自适应的处理方法也被引入到了目标提取的领域,其中,文献[4]采用空时自适应处理(Space Time Adaptive Processing,STAP)方法对机载雷达杂波进行抑制,从而提取出目标,该文也指出STAP方法只适合高脉冲重复频率的情况.针对目标分辨率增强的问题,文献[5]讨论了一些提高分辨率的方法,包含带宽外推和旁瓣去除等方法.文献[6]讨论了在概率分布的先验信息上进行提高分辨率.文献[7]采用了线性外推的方法得到一维高分辨距离像,然而却没有对方位向进行处理.针对上述问题,笔者提出了一种强杂波背景下SAR目标超分辨成像方法.该方法包括目标提取与目标分辨率增强两个部分.首先,通过分析发现目标回波与傅里叶基具有高度的相关性,而杂波与傅里叶基则表现出较弱的相关性.因此,根据这个特性估计出杂波幅度门限,进而提取目标强散射点.接着,结合梯度下降法来提取强散射点附近的弱散射点,完成对整个目标信息的精确提取.对于提取出来的目标信息,利用其在图像域的稀疏特性,提出了一种简化的正则化方法对目标进行分辨率增强处理,最终完成超分辨成像.实测数据处理结果验证了文中方法的正确性与有效性.
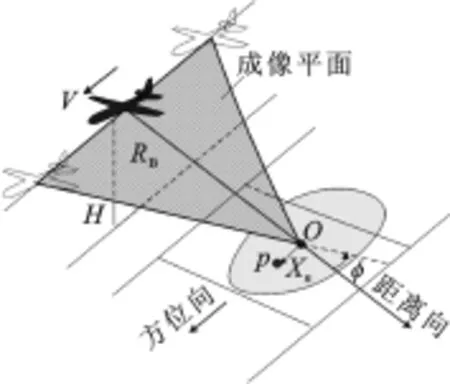
图1 SAR成像几何模型
1 SAR成像模型
SAR成像几何模型如图1所示,雷达工作在条带模式,平台高度为H,以速度V沿X轴匀速直线飞行,场景目标与雷达最近距离为RB.由图1几何关系可知,场景中心点为O点,场景中心线上存在一个点目标p,方位向点p距离O点间距为Xn,则点目标p到雷达的瞬时斜距为

其中,RB表示场景中心最短斜距,tm表示方位时间.
假设雷达发射的信号为线性调频信号,则去载频后的目标回波进行距离向脉冲压缩,并通过运动补偿去除法平面和沿航线方向误差,再通过方位匹配滤波,得到场景中点目标p的成像结果,即

其中,Δfr为信号频带宽度,Δfa为多普勒频带宽度,σp表示p点散射中心的幅度,c表示光速,λ表示雷达中心波长.
假设目标由P个散射中心组成,根据电磁散射原理,可得到目标成像的简单表达式为

由于强杂波背景下目标信号和杂波在时域通常不能很好的区分,为更好地分离杂波,精确提取目标信息,应在二维频域进行分离操作.将式(3)通过两维快速傅里叶变换转换到二维频域,可得

包含杂波和目标的目标区域数据在二维频域的表达为

其中,C(n,m)=Bnmexp(jφnm),表示杂波,服从随机分布;Bnm表示杂波的幅度;φnm表示杂波的相位.
因此,含有目标和杂波分布的SAR图像可以表示为

其中,IIFFT2表示两维快速傅里叶逆变换(Inverse Fast Fourier Transform-2D,IFFT2).
2 目标精确提取
2.1杂波自适应门限估计
在SAR众多研究应用中可发现,从地面反射回来的杂波有时比较强,甚至超过某些弱目标[8-10],因此,要在如此低信杂比的图像中提取完整的目标将是非常有必要的.对场景整个区域SAR成像后,为降低系统的计算量,满足实时处理的需求,一般先进行目标检测,对检测得到的目标切片数据再进行目标提取操作.然而,常规的恒虚警检测算法不能在强杂波背景下提取完整的目标信息.因此,文中通过对目标和强杂波的信号形式进行分析,从式(4)和式(5)中发现,目标散射点和强杂波在二维频域是不同的:在二维频域中目标散射点是正弦信号,而强杂波是随机信号.从相关性的角度看,目标信号与傅里叶基具有高度的相关性,而强杂波则表现出较弱.根据这个特性,可估计杂波自适应门限将目标信号从强杂波背景中精确提取出来.
信号和傅里叶基函数的相关系数矩阵定义如下:

将包含强杂波和目标的目标区域数据S(n,m)与傅里叶基函数进行相关后,目标信号与傅里叶基具有高度的相关性,而强杂波则表现出较弱相关性.因此,通过设置一个相关的杂波门限,就可提取出目标散射点,抑制强杂波,其散射点提取准则如下:

其中,Gext(k,h)是提取出来的目标散射点;ε是自适应杂波门限,其值选取是从图像中的杂波估计得到的.
式(8)中自适应杂波门限ε的设置至关重要,若其设置过高,则可能导致目标散射点的损失;若其设置过低,则可能会引入强杂波点.针对不同的目标图像切片,文中设计的杂波门限是自适应的,其是从目标所在图像中杂波来估计得到的.如图2所示,在大多数情况下,目标是聚焦在图像切片的少部分单元中,因此,利用式(7)相关系数矩阵对目标单元以外的杂波来估计,可得到杂波的自适应门限值.文中首先将图像中目标聚焦单元以外选出的杂波区域矩阵Di和傅里叶基进行相关处理,得到Di杂波区域和傅里叶基的相关度Coh(Di),提取Coh(Di)中最大的幅度εi,再取4个区域中εi的最大值,得到杂波自适应门限值ε,其具体计算公式为

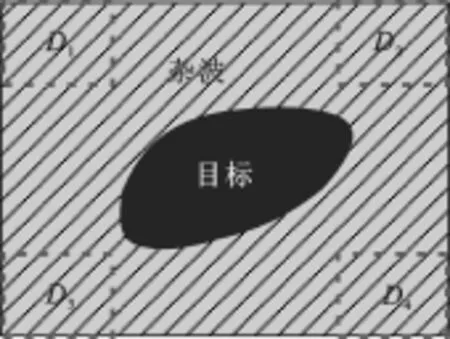
图2 杂波门限估计示意图

图3 梯度法提取散射区域的示意图
2.2基于梯度下降法的目标区域提取
在目标提取过程中考虑到强杂波条件下目标所在区域的信杂比较低,目标既包含强散射点也包含弱散射点,即目标强散射点的四周也存在目标的弱散射点.然而,利用上述杂波自适应门限估计方法得到的杂波自适应门限,可能会大于某些弱散射点和傅里叶基的相关度,这样在提取过程中,可能会丢失目标的弱散射点,提取得到目标的散射点不完整,影响了后期操作.因此,参照图3,为同时提取图像中的强散射点G(k,h)邻近的弱散射点和保证信号的连续性,对强散射点的邻近单元采取了梯度下降搜索的方法,即对邻近单元进行梯度判断,若邻近单元的梯度低于强散射点的梯度,则判断邻近单元为强散射点周围的弱散射点.最后,将强散射点和弱散射点组成的散射区域一起提取出来.散射区域提取准则如下:

其中,Gext(k,h)表示满足梯度下降法提取出来的散射区域矩阵,k表示(k-1,k,k+1)向量,h表示(h-1,h,h+1)向量,grad(·)表示梯度运算,G(k+i,h+j)表示强散射点G(k,h)周围8个邻近单元的其中一个.
具体来说,目标精确提取利用了散射点提取和散射区域提取两个准则,首先根据式(8)中的散射点提取准则,将包含目标和杂波的图像切片信号与傅里叶基在二维频域进行相关处理,计算得到图像中与傅里叶基相关度最大的散射点二维位置(k,h),继而提取出对应的时域散射点G(k,h),并根据式(10)中散射区域提取准则,提取出散射区域矩阵Gext(k,h);然后,将目标区域图像减去Gext(k,h),得到剩余图像,并将其转到二维频域,得到更新后的目标区域信号(n,m),把(n,m)作为上述操作的输入,与傅里叶基在二维频域进行相关处理,进一步迭代操作,直到剩余图像的散射点与傅里叶基最大相关度低于自适应门限值ε,即不满足式(8)中的散射点提取准则,停止迭代,完成目标的提取,得到目标的完整图像G=[Gext(k,h)]N×M.
3 基于简化正则化方法的目标分辨率增强
在有限系统参数条件下,雷达成像算法处理得到的图像分辨率难以满足SAR应用的高分辨要求[11-12].因此,很有必要对SAR图像进行分辨率增强处理,这样可有效增强图像的对比度和散射中心的定位精度,增强目标的可分辨性.正则化方法是实现SAR目标分辨率增强的一种有效方法,是利用目标稀疏先验来增强目标的分辨率[13].对于上述提取后的图像矩阵G,其主要是由强散射点构建,而强散射点在成像像素点中占很小的一部分,这意味着SAR图像目标具有很强的稀疏性.正则化方法正是利用这种目标稀疏先验为SAR目标提高分辨提供了可能.
对提取出来的目标完整散射区域图像矩阵G=[Gext(k,h)]N×M,期望通过正则化处理得到待重构的高分辨SAR图像为.根据观测量G(目标完整散射区域图像),利用有关图像的稀疏先验信息,得到待重构的高分辨率[13].因此,成像模型可表示为

其中,E为提取目标图像的残余噪声;Φ为成像算子,其本质上是对超分辨成像快速傅里叶逆变换后截取频谱并向量化.
由于待重构的高分辨SAR图像主要是信号与傅里叶基相关提取得到的散射点组成的图像区域,其幅度及其梯度分布通常具有稀疏性,实现二维超分辨可利用该稀疏性.向量化成像过程,得到优化函数[13]为

其中,λ1和λ2为正则化参数,表示lk范数,场景G数据大小为M×N,向量的大小为(M×N)×1.式 (12)中的第1项为数据保真项,是最小化实际观测量和待重构的高分辨率之间的平方误差;第2项表示的是目标的稀疏先验,它的适当选取有助于抑制伪目标,降低图像的旁瓣,保护和增强目标散射点的分辨性;第3项是反映目标边缘的稀疏先验,是一个光滑性惩罚项,该项的适当选取可保留图像强散射梯度(如图像边缘),从而保持目标的形状.
文中因为针对强杂波背景对目标进行提取处理时,已经使用梯度下降法保留了目标的边缘弱散射点信息,从而保持了目标形状.因此,为取得良好的超分辨成像效果,同时为保证实时处理,提高处理效率,提出了简化的正则化方法,忽略了上式优化函数的第3项,得到如下优化函数:

文中提出的简化正则化方法,简化了复杂的计算和迭代过程.在求解过程中,采用了共轭梯度法进行求解.其中,对于简化的正则化方法,范数k和正则化参数λ1的选取问题是一个重要问题.当k<2时,lk范数有高分辨率的谱估计,而且范数越小,文中提出的优化函数的解向量的结构就越稀疏.对于SAR图像重构,k越小越能保护更少数目的主要散射点和其幅度.当k=0时,就等同于向量的非零元素个数.因此,最小化目标函数argmin J(),等同于给定的能量投影到反映目标后向散射场的最少散射中心上,从而达到点增强的效果.通过对实测数据的处理过程可发现,用简化的正则化方法提高SAR图像分辨率时,范数k和正则化参数λ1之间存在一种组合,可使得图像分辨率达到最优.因此,文中经过大量的实测数据测试发现,当k=0.9,λ1为两倍图像噪声水平时,目标分辨率增强效果最佳.
4 实测数据处理结果和分析
下面通过对实测角反射器和静止的机动车数据的处理,来验证文中所提方法的有效性.
实测数据参数:雷达的波长为0.03 m,信号带宽为680 MHz,脉冲重复频率为1 000 Hz,载机速度为87 m/s.实验利用文中提出的目标提取法对两类目标分别进行目标提取,并对提取后的目标进行目标分辨率增强处理,增强了目标可分辨性,抑制旁瓣和噪声,提高了SAR图像对比度,实现了目标超分辨成像.
4.1角反射器数据处理
为验证文中方法的有效性,采用文中提出的目标提取和分辨率增强算法对某机载实测数据进行处理.如图4所示,在实测场景中放置3枚边长为15 cm的三角反射器,距离向相距为0.94 m,方位向相距为0.72 m.
对场景回波数据,首先进行线频调变标成像处理,利用文中方法对成像结果(只取了其中含角反射器的30×30区域)先后进行目标提取和分辨率增强处理,得到结果如图5所示.其中,图5(a)是角反射器在内的原始成像切片图像,可看到目标的背景杂波较强,目标的弱散射点掩盖在强杂波中;图5(b)是利用文中的目标提取算法,得到的目标提取后结果,通过对比可以发现,弱散射点也被提取出来了,信号的完整性得到了保留.此外,结合图5(a)和图5(b)计算得到目标信杂比为3.95 d B,因此,在SAR图像中,图5(a)中的杂波可认为是强杂波.图5(c)是将图5(b)中提取的目标进行8倍插值的结果,图中3枚角反射器依次标记为1号,2号,3号;图5(d)是利用文中简化的正则化方法进行超分辨处理后的结果.为直观评估文中提出目标分辨率增强算法的性能,图6(a)画出了1号和2号角反射器超分辨前后的方位剖面图,图6(b)画出了2号和3号角反射器超分辨前后的距离剖面图.从图6两幅子图中可明显看出,角反射器的主瓣变窄,主瓣峰值能量没有变化,有效增强了图像的对比度,说明了采用文中超分辨成像方法,可大大提高目标的分辨率,验证了文中方法的有效性和正确性.

图4 实测场景角反射器
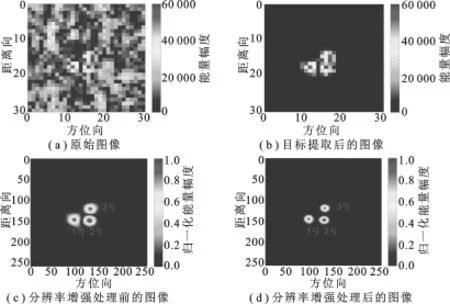
图5 文中算法对角反器目标超分辨处理的结果图
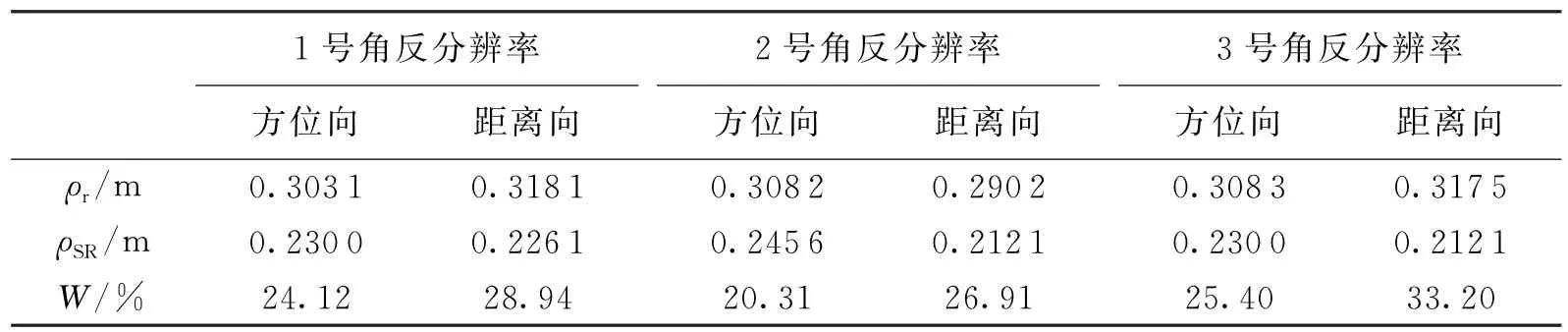
表1 角反射器实测数据的处理后分辨率结果
此外,为研究目标超分辨率处理后的分辨率,以点目标的3 d B主瓣宽度作为分辨率大小的评价指标,计算3个角反射器超分辨前后各自的分辨率和分辨率提升值W,计算结果如表1所示.分辨率提升值W的计算公式为

图6 角反器目标超分辨处理前后分辨率的对比图

其中,ρr表示超分辨前的分辨率,ρSR表示超分辨后的分辨率.
通过对表1的数据分析可发现,利用文中提出的目标分辨率增强算法对角反射器目标进行超分辨处理后,角反射器的分辨率可提升20%到33%.
4.2静止机动车数据处理
静止机动车是由各个构件组成的,其散射特性不单单是各个构件反射的线性相加,其整体的实际反射特性会受整体各个构件散射特性的相互影响.因此,为进一步验证文中方法针对静止机动车的处理有效性,对同一个实测场景的静止机动车进行了目标提取和分辨率增强处理.
利用文中方法对成像结果(只取了含机动车的60×60像素区域)先后进行目标提取和分辨率增强处理.图7是文中方法对机动车进行目标提取和超分辨的处理结果图,其中,图7 (a)是机动车的原始成像结果,图7(b)是文中提出的目标提取方法的处理结果.通过对比可以发现,机动车的弱散射点也被提取出来,信号的完整性得到了保留.图7(c)是提取出来的目标12倍插值后的结果.图7(d)是利用目标分辨率增强方法进行超分辨处理的结果.为方便下文具体分析,在图7(c)和图7(d)的两幅图中同一位置圈出两个特显点区域,并进行了标号,如图中圆圈所示.从圆圈中的散射点可以明显看出目标分辨率提高了,其中以圆圈2为例,由于超分辨之前,目标分辨率低,3个散射点不能有效分开,在图像中表现为一个粗的亮点;超分辨处理后,目标分辨率得到了增强,3个散射点表现为3个细的亮点.因此,超分辨处理极大提升了图像中目标的分辨率,可看到目标更多的散射信息,有效增强了图像的对比度和散射中心的定位精度,为后期目标自动识别提供了更多有用信息.
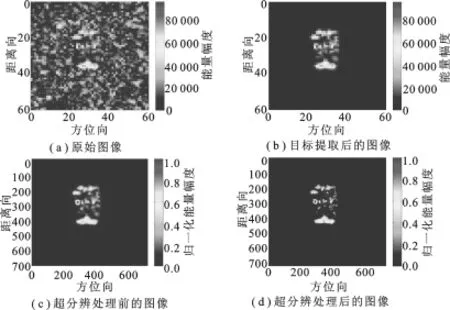
图7 文中算法对机动目标超分辨处理结果图
5 结束语
文中针对强杂波背景下的SAR目标超分辨成像问题,提出了一种利用目标信号相关性估计杂波自适应门限;然后,利用基于梯度下降法的目标区域提取方法,对目标进行了精确提取;最后,提出了改进正则化方法对目标进行分辨率增强处理,增强了目标可分辨性,抑制旁瓣和噪声,提高了SAR图像对比度,得到了超分辨处理的结果.机载实测角反射器和机动目标数据处理验证了文中方法的有效性和正确性.
[1]邢孟道,保铮,李真芳,等.雷达成像算法进展[M].北京:电子工业出版社,2014:11-45.
[2]王洁.机载雷达杂波抑制技术的研究[D].成都:电子科技大学,2006.
[3]陈家兵,崔凯峰.机载雷达地杂波数据的分析与处理[J].电子工程师,2006,32(7):11-12. CHEN Jiabing,CUI Kaifeng.Research and Process on Groud Clutters Data of Airborne Radar[J].Electronic Engineer,2006,32(7):11-12.
[4]刘小洋,李勇,李瑞克.机载雷达杂波抑制优化与性能分析[J].计算机仿真,2013,30(4):108-111. LIU Xiaoyang,LI Yong,LI Ruike.Clutter Suppression Optimize and Performance Analysis of Airborne Radar Clutter [J].Computer Simulation,2013,30(4):108-111.
[5]BORISON S L,BOWLING S B,CUTOMO K M.Superresolution Methods for Wideband Radar[J].The Lincoln Laboratory Journal,1992,5(3):441-461.
[6]GUGLIELMI V,CASTANIE F,PIAU P.Application of Superresolution Methods to Synthetic Aperture Radar Data [C]//Proceedings of International Geoscience and Remote Sensing Symposium:3.Piscataway:IEEE,1995:2289-2291.
[7]GARBRIEL W F.Improved Range Superresolution via Bangwidth Extrapolation[C]//Proceeding of the National Radar Conference.Piscataway:IEEE,1993:123-127.
[8]高博,王俊,原慧.一种参数自适应的SAR图像去噪方法[J].西安电子科技大学学报,2015,42(5):71-76. GAO Bo,WANG Jun,YUAN Hui.Parameter Adaptive SAR Image Denoising Method[J].Journal of Xidian University,2015,42(5):71-76.
[9]NING Q,CHEN K,LI Y,et al.Image Super-resolution via Analysis Sparse Prior[J].IEEE Signal Processing Letters,2013,20(4):399-402.
[10]ZHANG S X,XING M D,XIA X G.Robust Clutter Suppression and Moving Target Imaging Approach for Multichannel in Azimuth High-resolution and Wide-swath Synthetic Aperture Radar[J].IEEE Transactions on Geoscience and Remote Sensing,2015,53(2):687-709.
[11]盛佳恋,张磊,邢孟道,等.一种利用稀疏统计特性的超分辨ISAR成像方法[J].西安电子科技大学学报,2012,39(6):65-71. SHENG Jialian,ZHANG Lei,XING Mengdao,et al.Super-resloution ISAR Imaging Method with Sprase Statistics[J]. Journal of Xidian University,2012,39(6):65-71.
[12]TIAN Y,YAP K.Joint Iamge Registration and Super-resolution from Low-resolution Images with Zoonimg Motion[J]. IEEE Transactions on Circuits and Systems for Video Technology,2013,23(7):1224-1234.
[13]王正明,朱炬波.SAR图像提高分辨率技术[M].北京:科学出版社,2006:131-153.
(编辑:齐淑娟)
Super-resolution imaging method for the SAR target in a strong clutter scene
JING Guobin,SHENG Jialian,CHEN Jianlai,SUN Guangcai,
XING Mengdao,BAO Zheng (National Key Lab.of Radar Signal Processing,Xidian Univ.,Xi’an 710071,China)
This paper proposes a super-resolution imaging method to solve the problem of extracting targets and enhancing resolution under a strong clutter in the SAR image.Based on singal correlation,an adaptive clutter threshold is proposed to extract strong scatterers of targets.Then weak scatterers of targets are extracted by the gradient descent method.Finally,target resolution is enhanced to realize superresolution imaging by the simplified regularization method.Real-measured data of reflectors and the stationary vehicle validate the effectiveness of the proposed method.
strong clutter;SAR;targets extraction;resolution enhancement;super-resolution imaging
TN957
A
1001-2400(2016)05-0012-06
10.3969/j.issn.1001-2400.2016.05.003
2015-06-12 网络出版时间:2015-12-10
国家自然科学基金资助项目(61222108,61301292)
景国彬(1990-),男,西安电子科技大学博士研究生,E-mail:Guobinjing01@163.com.
网络出版地址:http://www.cnki.net/kcms/detail/61.1076.TN.20151210.1529.006.html
