无人机地面控制站飞行预检软件的设计
2016-11-21冷月香孙恒义刘慧霞
冷月香,孙恒义,刘慧霞
(1.西安爱生技术集团公司 陕西 西安710065;2.西北工业大学365所,陕西 西安710065)
无人机地面控制站飞行预检软件的设计
冷月香1,孙恒义1,刘慧霞2
(1.西安爱生技术集团公司 陕西 西安710065;2.西北工业大学365所,陕西 西安710065)
依据无人机地面指挥控制站系统的组成和工作原理,针对飞行前操作手的检测工作的繁琐性,设计了飞行预检软件。该软件使用Microsoft Visual C++2012编程,与地面指挥控制站软件共用接口进行通信,全系统加电后,进行飞行前的测试环节,采用自动检测模式,指令循环结合飞机硬件观测的检测状态进行提示。经过系统联试,表明该软件在全系统的飞行前使用的可行性和优越性。
无人机;地面指挥控制站;预先检测;指令循环
近年无人驾驶飞机的日益发展,为了满足更多性能,高配置系统的复杂性提高,成本随之增加,因此飞机安全是首要保证[1-3]。
在飞机起飞前,地面指挥控制站、无人驾驶飞机和数据链控制站,全系统加电,飞机满油状态下,飞行操作手需要通过地面控制站的飞行监控系统,进行相关指令循环,包括飞行控制指令、地面设置指令能、链路控制指令和发动机控制指令,确保全系统的完备性,所有环节测试合格后,才可以能开始飞行。这一系列指令循环环节进行的操作多,操纵手需要依照经验依次操作,很容易遗漏某些检测[4-8]。
当前有些检测设备可以进行故障诊断,但是专用的检测设备增加成本,硬件接口的连接和操作程序,使得检测过程比较复杂,因此设计一款智能化的自动检测软件加载到已有的地面站软件中,代替飞行前飞行操纵手的复杂检查工作是很必要的[9-11]。
1 地面指挥控制的组成及工作原理
地面指挥控制系统是作为系统的指挥作战中心,是无人机系统中不可或缺的组成部分。主要进行飞行参数显示、路径规划、任务规划、飞机的控制等。
地面指挥控制站系统分为硬件和软件。硬件部分包含地面站加固计算机、无线电数据链和操作设备等,软件主要由数据处理软件、监控软件组成。软件结合硬件实现地面对无人驾驶飞机的精确操纵和任务执行。
其中数据处理软件是地面站数据交互的入口,主要负责所有数据的处理,图像数据和飞行数据分别通过网络TCP/IP通信协议下传至系统其它监控软件,监控软件包含了飞行参数监控、导航监控和任务图像监控,监控软件同时将飞机控制指令通过网络发送至数据处理软件,最终传送给无线电数据链终端,从而实现对无人机的指挥控制[12-14],无人机地面站内部构如图1所示。

图1 无人机地面站内部结构
2 软件的设计与实现
2.1飞行指令状态自检判据
一个飞行指令的正确执行检测包括以下几方面,1)数据处理软件接收到监控软件发送的飞行指令,2)飞行控制计算机接收到地面站的飞行指令,3)飞机执行该指令后相应状态的改变符合机载设定值。
为了符合飞行前检测的规定,飞行指令操作执行按照一定的顺序进行,不同飞行指令改变的飞行状态阈值范围是按照飞机性能规定。软件采用文本的方式,对执行的飞行指令依次排序,并且写入飞行状态的阈值。
所有飞行自检开始前,必须保证的状态是,数据链锁定、飞机定位、卫星定位。如果以上状态不满足,自检指令所有的执行失败。所以首先执行的是这3个状态的判定,然后进行其他指令自检。这些情况事先考虑全面写入判据文本,可以更加简化飞前检查流程。本中参数格式如下所示:
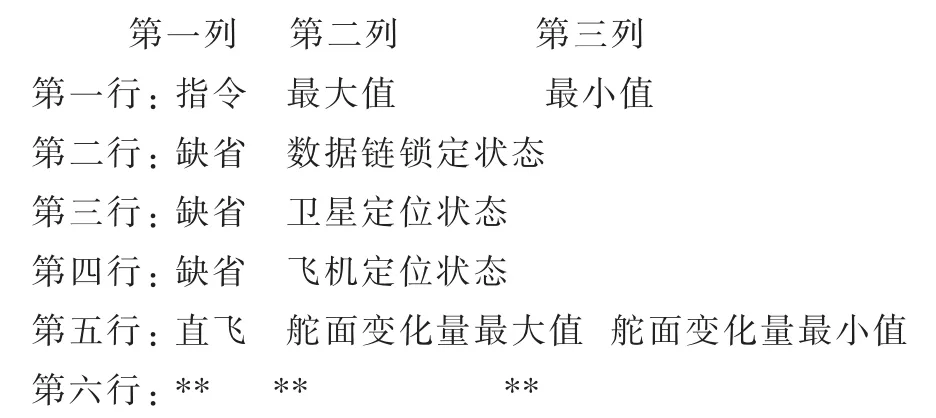
飞行操纵手根据飞机性能,改变文本中各个参数值,为自动检测做准备。
2.2判据的读取与缓存
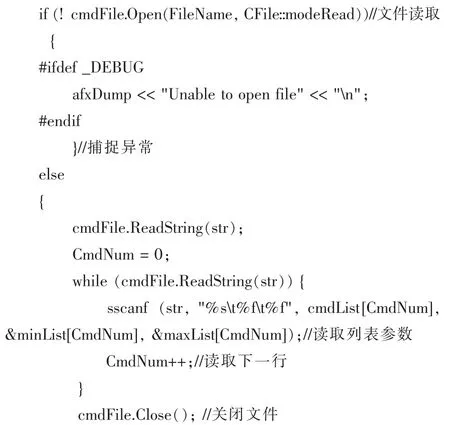
软件采用TCHAR的字符串数据类型存储参数[15],使用VC中文件操作语句读取TXT格式的文本文件,按行依次读取指令、状态最大值、状态最小值。存储在变量中,便于程序检,具体实现如下:
2.3具体自检方法
软件按照模块化进行设计,分为文本读取ReadFile()、指令参数状态更新UpdateState()、执行指令Execute()、状态检测,其中状态检测分为回报检测CheckFlyInsrtuct()和参数检测 CheckFlyState()。每一个指令对应的都有相应的CheckFlyInsrtuct()和CheckFlyState()函数,对这些模块进行具体说明,文本读取模块,读取TXT文本存入变量中;指令参数状态更新,将所有检测指令对应的状态数据从网络参数中更新;回报检测,检测指令对应的飞机回报状态;参数检测,不同指令对应参数的判定其是否在TXT文本范围内。具体实现流程如图2所示。

图2 软件流程图
3 软件调试中的问题与解决方法
1)自检项目的分类
在地面站上安装软件后,软件调试时,发现进行自动检测时,有些飞行指令执行的正确性,除了配合指令标志和状态,还需要飞前人员观察飞机对应硬件设备的执行状态,在传统检测中,操纵手也会因为操作指令而遗忘硬件设备的观察,为了解决这些,将这些指令执行归为一类,并在其检测结果的后面,自动加上相应的硬件设备检查提示,指令常规自检成功后,操纵手手动点击“提示项目完成”按键,自检才算执行成功。
2)预检软件的加载方式
由于地面站安装软件较多,安装了预先自检软件后,从视觉上增加屏幕显示的负担,操作上需要多点击一个执行程序,因此可以在现有地面站软件中,添加使能按键,调用预检软件的执行程序,这样操作便捷。实现代码如下:
ShellExecute(NULL,”open”,”Detection.exe”,Null,NULL,SW_SHOWNORMAL)
4 结束语
飞前预检软件的设计提高了无人机系统地面站飞前检查的自动化。针对飞行指令自动循环、配合飞机硬件状态进行判定。软件采用VC++2012开发,该软件也可以制作成动态链接库,嵌入监控软件中,也可以在监控软件中启动,或者直接安装在地面站计算机中,应用方式灵活。通过某民用煤碳探测型无人机的飞行使用,该软件功能简化了操纵手飞行前检测程序,同时全面的流程化的自动检测方式可以保证检测的全面性,未检测通过的环节采取提示保存,减轻操纵手的负担,使其有更多的时间准备飞行中的相关策略。
[1]秦博.无人机发展综述[J].飞航导弹,2002(8):1.
[2]卢艳军.无人机地面站发展的分析研究[J].沈阳航空航天大学学报,2014,31(3):60.
[3]张翼麟.2012年世界军用无人机发展动向及评述[J].飞航导弹,2012(7):69.
[4]陈知秋.无人机便携式检测系统的设计与实现[J].测控技术,2007,26(2):78.
[5]师卫平.虚拟仪器在无人机故障诊断系统中的应用[J].测控技术,2004,23(3):74.
[6]温海东.飞机集中告警系统设计[J].科技创业之家,2013(5):1.
[7]杨柳庆.多机任务模式无人机分布式检测诊断与发射控制系统[J].电子测量技术,2013(1):97.
[8]雷金奎.基于Visual Studio的无人机地面配置及检测平台设计[J].国外电子测量技术,2012,32(8):84.
[9]曾繁伦.基于数学形态学的抗无人机检测预处理算法[J]. MODERN DEFENCE TECHNOLOGY,2008,39(3):84.
[10]花良浩.无人机故障注入与故障诊断实时仿真平台研制[J].计算机应用与软件,2013,30(8):106.
[11]师卫平.基于虚拟仪器的无人机故障诊断系统设计[J].航空计算技术,2004,34(1):53.
[12]马聪颖.无人机地面控制站通用化软件架构[J].航空计算技术,2013,43(3):112.
[13]徐雷.一种小型无人机地面控制站软件的开发[J].自动化与仪表,2009,24(6):40.
[14]吴辉喜.基于信息一体化系统的无人机数据链技术应用[J].四川兵工学报,2013,34(2):114.
[15]孙鑫.VC++深入详解[M].北京:电子工业出版社,2012.
Design of the pre detection on the ground control station of UAV
LENG Yue-xiang1,SUN Heng-yi1,LIU Hui-xia2
(1.Xi'an ASN Technology Group Company,Xi'an 710065,China;2.The 365 Institute,Northwest Polytechnical University,Xi'an 710065,China)
According as the composing and working theory of the the ground control station,we design the pre detection software for the intricacies of the detection for the preflight.This software is based on Microsoft Visual C++2012,alse can communication by the common interface with the other softwalls of the station.When the whole system in powered on,the software can detecte automatically by the instruction cycle and observation of hardware..The integration test showed the feasibility and advantage on the pre detection of UAV system.
UAV;the ground control station.;pre detectionl;the instruction cycle
TP311.1
A
1674-6236(2016)21-0141-02
2016-03-21稿件编号:201603283
国家自然科学基金资助项目(61074155)
冷月香(1986—),女,湖北襄阳人,硕士,工程师。研究方向:无人机飞行监控系统和导航监控系统。
