重载工业机器人用2K-V型减速机传动效率试验分析
2016-11-19李充宁杨保占刘学斌
李充宁,杨保占,刘学斌
(天津职业技术师范大学机械工程学院,天津300222)
重载工业机器人用2K-V型减速机传动效率试验分析
李充宁,杨保占,刘学斌
(天津职业技术师范大学机械工程学院,天津300222)
基于2K-V型行星传动的运动关系分析其传动比的计算,对其传动效率计算进行了进一步的理论分析和实例计算;对重载2K-V型减速机样机和进口对应机型进行传动效率试验测试,并将测试结果进行对比分析。结果表明:自主研发的重载精密2K-V型减速机的传动效率达到87%,实现了重载工业机器人用高精度减速机“高效率”的要求,为我国自主开发重载工业机器人提供了条件。
2K-V型减速机;传动效率;试验测试;重载工业机器人
用于重载工业机器人关节传动的2K-V型减速机属于一种复合式摆线针轮少齿差行星传动机构,具有承载能力高、刚度大、体积小、传动比大、传动效率和传动精度高等优点,多用于重载搬运机器人及重载点焊机器人上。近年来,随着机器人技术的快速发展,国内对这种传动进行了大量研究和开发,国家“863”计划重大项目特别支持机器人核心部件开发,天津职业技术师范大学参加了“工业机器人高精度高效率减速器开发”课题,对重载工业机器人用2K-V型减速机进行研发和试验测试研究。
高效率传动是重载精密2K-V型减速机研发最重要的特性指标。早在20世纪70年代,国内就开展了有关摆线针轮行星传动传动效率的相关研究[1-2];20世纪90年代,研究人员对新出现的曲柄式摆线针轮少齿差2K-V型行星传动的效率进行了理论计算和研究分析[3-4]。文献[3]对不同传动方式下的啮合效率作了详细计算和分析;文献[4]针对2K-V型减速机的传动效率进行了分析,基于转化机构法推导了效率理论计算公式。尽管如此,针对精密2K-V型减速机在重载工况下传动效率的计算和试验测试分析还需要研究探讨。本文基于2K-V型行星传动的运动关系分析了其传动比的计算,对其传动效率计算进行了进一步的理论分析和实例计算;针对重载2K-V型减速机样机和进口对应机型进行传动效率试验测试,并对结果进行了对比分析。
1 2K-V型行星传动机构的运动分析
1.12K-V型行星传动机构的传动原理
2K-V型行星传动机构是由2K-H和K-H-V机构复合形成的一种新型行星传动机构,该机构的简图如图1所示[5],其结构组成如图2所示。
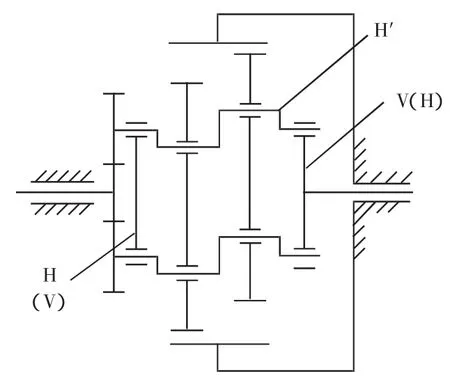
图1 2K-V型减速机机构简图
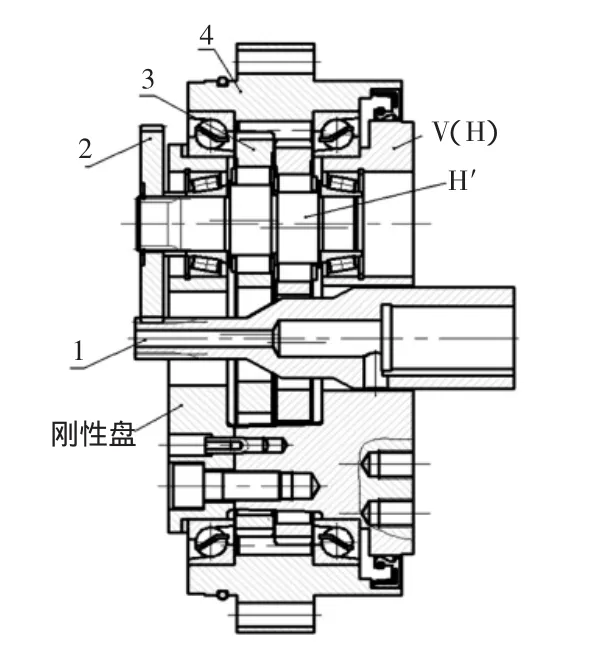
图2 重载2K-V型减速机结构图
由图1可知,该传动机构是由输入的中心轮1、第一级行星轮2、第二级摆线轮3、针齿轮4及曲柄轴(行星架)H′和等速输出构件V(H)组成的一种双重行星机构。该机构是由周转轮系中的2K-H型负号机构与少齿差K-H-V型机构复合形成的一种新型复合行星传动机构,这种机构兼顾了2K-H型负号机构的高效率和少齿差传动的小体积、大速比特征。
重载2K-V型减速机结构中,减速机行星轮2布置在刚性盘的外侧,轮2和曲柄轴联接处与支撑轴承间的距离较长,这种布置有利于提高轮2的均载效果。
1.22K-V型行星传动机构传动比的计算分析
2K-V型行星传动机构中的输出构件有2种选择:针齿轮4输出或等速输出构件V(H)输出。当选择构件V(H)固定,针齿轮4为输出构件时,此种2K-V型行星传动为普通的曲柄式少齿差行星传动,该种传动方式的传动比为:

式中:i14为构件1和4的传动比;z1、z2、z3、z4分别为构件1、2、3、4的齿数。
当选定针齿轮4固定、构件V(H)为输出构件时,支撑行星轮2的行星架H与行星轮2及中心轮1形成一个周转轮系,此周转轮系还包含了摆线轮3构件H′和针齿轮4形成的另一个周转轮系,所以此传动机构成为双重周转轮系,这种运动状况下构件1和V的传动比为:

2 2K-V型减速机传动效率分析与计算
减速机的机械传动效率是评价其传动质量优劣的重要特性指标之一,研究2K-V型减速机的传动效率对研制减速机的性能评价和选型应用非常重要。根据对2K-V型减速机的传动分析,其传动的功率损耗主要包括齿轮啮合传动的损耗、各部位轴承运转的摩擦功率损耗,还有润滑剂搅动的功率损耗等。齿轮啮合传动是影响整机传动效率的主要因素,本文主要从齿轮啮合传动的功率损耗来分析2K-V型减速机运转中的传动效率。齿轮啮合传动产生的功率损耗主要由轮齿间啮合接触时相对运动的摩擦引起,轮齿接触面间的摩擦功耗取决于齿面间啮合的相互作用力和相对滑动速度的大小[6]。行星齿轮传动机构与其转化机构两者的外部施加转矩相同,原行星机构中各构件与其转化机构中各构件之间的相对运动关系也相同,因此原行星机构与其转化机构在运转中相啮合齿轮副中具有相同的相对滑动速度和相互作用力,因此两者的摩擦功耗相同。基于转化机构法可对2K-V型行星减速机进行传动效率的理论计算和分析。
根据上文给出的传动比计算公式可得[3-4]:

由于2K-V型减速机的传动比i1V是其各部分传动的内传动比函数,因此可得:

根据同样的关系,将其传力的传动比i1V看成各部分传力内传动比的函数,同样可得:

由此其传动效率为:
因i1V=ω1/ωV,所以其传动效率可改写为:

又因

将式(7)代入式(6)得到:

3重载2K-V型减速机传动效率计算实例
重载2K-V型减速机整机的功率损耗包括多方面因素,产生功率损失最大的主要有轮齿啮合摩擦损失和轴承转动摩擦损失,因此重载2K-V型减速机的整机传动效率简化计算式为:

式中:η′为2K-V型减速机中各部位轴承的总效率,且η′=η1′η2′η3′。其中:η1′为角接触球轴承的效率;η2′为圆锥滚子轴承的效率;η3′为滚针轴承的效率。
本文以额定输出转矩为5 000 N·m的重载2KV500S型减速机样机为例进行效率的数值计算,已知参数如下:输入轴齿数z1=12,同步轮齿数z2=72,摆线轮齿数z3=39,针轮齿数z4=40,短幅系数K1= 0.768 6,针齿销半径rz=5 mm。
3.1前一级齿轮传动的啮合效率计算
前一级齿轮为渐开线齿轮,其传动齿轮啮合效率计算公式为:

式中:μ为接触齿面的摩擦系数,重载齿轮μ=0.05~0.1[7]。本文所进行测试的减速机,其输入齿轮和同步轮的渐开线轮齿是用普通滚齿机加工,其加工精度为7级,据此选取μ=0.06。εi为重合度,i=1,2,则

式中:αai为齿顶圆压力角,i=1时为输入齿轮,i=2时为同步轮,且αai=arccos(mzicos α/2rai);rai为齿顶圆半径。
把已知参数代入方程式中,计算得出渐开线齿轮传动啮合效率为:
3.2后一级摆线针轮传动的啮合效率计算
摆线齿轮与针齿销内齿轮传动啮合效率的计算公式为:

式中:f为摆线齿与针齿销接触滑动摩擦系数,f= 0.05~0.1;C为滑动特性系数,C=4/πz3=0.032 647。由于无套针齿销与摆线轮之间直接接触,精密传动齿侧隙控制严格,齿廓间的滑动摩擦系数较大,计算时选取摩擦系数f=0.07。代入式(11)得出摆线针轮传动的啮合效率为:
3.3轴承部分的总传动效率
2K-V型减速机中多个部位装有轴承,包括支承行星架的角接触球轴承、支承曲柄轴的圆锥滚子轴承和转臂滚针轴承。其中,角接触球轴承和圆锥滚子轴承的效率按精密传动有预紧的工况考虑,分别取值为η1′=0.992、η2′=0.994、η3′=0.984,所有轴承的总效率为:
η′=η1′η2′η3′=0.992×0.994×0.984=0.970 3
将以上计算结果代入式(9)得到精密2K-V型减速机的总效率为:
普通减速机影响传动效率的主要因素是齿轮的啮合效率。影响2K-V型减速机传动效率的主要因素既有齿轮啮合效率,还有支承轴承的效率。由上述计算结果来看,各部位轴承的总效率对精密2K-V型减速机的传动效率影响最大,摆线齿针齿销的啮合效率对总传动效率影响较小。因此,2K-V型减速机的设计和制造中轴承的选用尤为重要。
上述计算中没有考虑润滑剂的影响,但润滑油的黏度对减速机运行和传动效率的影响必须关注,选择的润滑油黏度大,则减速机在运转时搅动油液带来的功率损失就大,也会影响其传动效率。因此选择黏度合适的润滑剂对减速机的传动效率也非常重要。
4 重载2K-V型减速机效率试验测试分析
采用我校的精密度传动试验台,对自主开发的重载2K-V500S型减速机样机和进口对应机型F2CFSNA80样机进行试验对比测试,输入转速为1 500 r/min时,研制的2K-V500S型T2号和T5号2台样机及进口F2CFS-NA80样机的效率随输出转矩变化的关系曲线图如图3所示。3台减速机在额定载荷5 000 N·m时的测试结果如表1所示。

图3 3台减速机输出转矩与效率曲线合成图
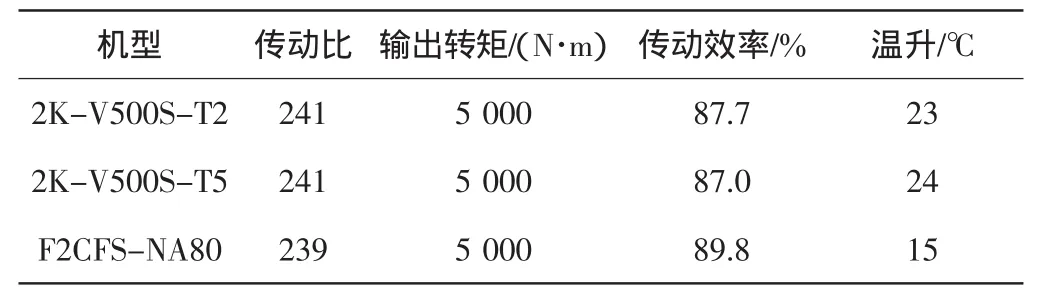
表1 国产减速样机和进口减速样机试验测试结果
由图3可以看出,效率随输出转矩增大呈现上升趋势。对比图中3条效率曲线可知,自主研发的2KV500S型减速机在载荷达到额定载荷的25%以上时,效率就达到80%;进口样机在载荷达到额定载荷的50%以上时,效率才达到80%。输出转矩在3 800 N·m附近时,3条曲线相交;输出转矩小于3 800 N·m时,国产样机的效率高于进口减速机。而当输出转矩高于3 800 N·m时,进口减速机效率高于国产减速机。通过对比分析,国产减速机在较大扭矩范围内具有较高的传动效率,表明我校自主研发的重载2K-V500S型减速机在零件加工精度和整机的装配精度方面已达到较好的效果,2K-V型减速机传动效率较高,超载时效率设有下降,处于过载工况时仍然保持良好的工作状态。
由表1可知,3台样机测出的效率值分别为87.7%、87%和89.8%。自主开发的2台精密2KV500S型减速机(其回差<1.0′)[8-9]在额定载荷5 000 N·m时其传动效率接近于进口减速机,温升略高于进口减速机。
5 结论
综合上述计算分析和试验测试得出:
(1)本文基于转化机构法和传动比法建立了2KV型减速机传动效率的理论计算式,为该类减速机的设计和性能分析提供了依据。
(2)针对重载精密2K-V型减速机样机进行的传动效率数值计算和试验测试。结果表明:精密2K-V型减速机在大传动比和重载工况下仍具有较高的传动效率。同时,分析了2K-V型传动的传动原理,给出2K-V型减速机在2种情况下的传动比公式。
(3)该型减速机传动效率的理论计算数值与试验检测数据基本一致,验证了文中有关的理论分析和建立的计算公式的正确性。
(4)国内外样机的对比试验测试表明,我校自主研发的重载精密2K-V型减速机传动效率达到了国际同类机型的效率指标,实现了国家“863”计划课题提出重载工业机器人用高精度减速机实现“高效率”的要求,为我国自主开发重载工业机器人提供了支持。
[1]冯澄宙.摆线针轮行星传动效率的探讨[J].机械传动,1979(2):72-81.
[2]张少铭.行星传动[M].西安:陕西科学技术出版社,1988.
[3]刘继岩,孙爽,幸坤銮,等.2K-V型行星传动的啮合效率[J].天津职业技术师范学院学报,1991(2):1-4.
[4]何卫东,李力行,叙永贤,等.高精度RV传动的受力分析及传动效率[J].机械工程学报,1996,32(4):104-110.
[5]李充宁,孙涛,刘继岩.2K-V型行星传动的结构和力的分析[J].机械传动,2000,24(2):7-9.
[6]李充宁,严细海,刘继岩.圆弧齿2K-V型传动效率计算分析[J].天津职业技术师范学院学报,2003,13(2):1-4.
[7]何卫东.机器人用高精度RV传动的研究[D].哈尔滨:哈尔滨工业大学,1999.
[8]李充宁,刘长坤,杨保占.重载2K-V型减速机回差与刚度的测试试验研究[J].机械传动,2015,39(4):65-68.
[9]李充宁,杨保占,蔡胜.2K-V型减速机传动效率的计算及试验测试分析[J].机械传动,2013,37(4):86-90.
Transmission efficiency experimental analysis on type 2K-V reducer for heavy industrial robot
LI Chong-ning,YANG Bao-zhan,LIU Xue-bin
(School of Mechanical Engineering,Tianjin University of Technology and Education,Tianjin 300222,China)
Based on the principle of 2K-V type transmission,its transmission ratio is analyzed in the paper.And the transmission efficiency is analyzed theoretically and calculated practically.The transmission efficiency experiments for heavy load 2K-V type reducer and the corresponding model of the import reducer are tested.The results of testing are comparatively analyzed.Test results show that the transmission efficiency of independent development 2K-V type reducer has reached 87%,realizing the requirements of the"high efficiency"of high precision reducer for heavy industrial robot,which has laid a firm foundation for our country to develop independent heavy industrial robots.
type 2K-V reducer;transmission efficiency;experimental test;heavy industrial robot
TH132.46
A
2095-0926(2016)03-0001-04
2016-07-15
国家“863”计划重大项目课题(2011AA04A102).
李充宁(1953—),男,教授,硕士,研究方向为机械设计与精密机械传动.
