基于改进卡尔曼滤波的水声通信盲自适应多用户检测算法
2016-11-17曹自力王虹入王中秋
李 杨,曹自力,王虹入,王中秋
(1.中国人民解放军 91872部队,北京 102442;2.青岛地区装备修理监修室,山东 青岛 266001;3.山东省科学院海洋仪器仪表研究所 山东省海洋环境监测技术重点实验室,山东 青岛 266001)
基于改进卡尔曼滤波的水声通信盲自适应多用户检测算法
李 杨1,曹自力2,王虹入3,王中秋3
(1.中国人民解放军 91872部队,北京 102442;2.青岛地区装备修理监修室,山东 青岛 266001;3.山东省科学院海洋仪器仪表研究所 山东省海洋环境监测技术重点实验室,山东 青岛 266001)
针对水声通信网络中遇到的多用户检测中目标用户的多址干扰等检测问题,提出了基于改进Kalman算法的盲自适应多用户检测算法,解决了多用户检测中的多址干扰对水声通信信道用户变动时的干扰抑制问题;仿真分析分别针对同步多用户、异步多用户通信过程,对比了传统Kalman算法及改进的Kalman算法的性能差异,通过仿真对比表明,改进后的Kalman检算法不需要训练序列即可以实现同步和异步通信状态下的多水声目标用户的盲自适应检测,改进后的算法目标检测的信干比比传统算法最大可提高6 dB;新算法对于水下多用户检测、区分,准确、稳定的实现基于CDMA协议的快速水声通信具有重要意义。
卡尔曼滤波;多用户检测;盲自适应;水声通信
0 引言
随着21世纪世界各国对海洋开发、海洋探索力度的加大,催生了水声通信网络[1- 2]技术的较快发展,以实现海洋信息的收集与监听。由于水声信道是迄今为止最为复杂的无线通信信道之一,其固有的时-空-频变以及窄带、高噪、强多途、长时延传输等特征,使水声通信和水声网络在性能上还难以满足人们在实际应用中的需求,迫切需要能传得更快、更远,能实现多用户检测的水声通信方法及技术,用以准确有效地实现多用户的实时接入,提高数据传输量及传输速率,同时能够抵抗外部干扰,提高通信效率和准确性。基于码分多址(CDMA)的无线水声通信盲自适应多用户检测技术是解决上述问题的有效手段[3]。
CDMA技术允许多个用户同时共用整个频带,具有较强的抗多径干扰能力且保密性强。由于水声信道的复杂性,当移动用户和基站之间的通信因某种不可预知的强干扰(如新的多径出现、环境变化、新的干扰用户出现等)而突然恶化时,盲自适应多用户检测技术[4]可在不需要知道系统参数及用户重新发送训练序列的情况下,使系统恢复正常,这一特性对于水声无线通信及水声通信网络发展,特别是军用场合具有极大的吸引力和较好的发展前景[5]。对于多用户水声通信过程中的多用户盲估计检测,目前研究较少,本文提出了基于改进kalman滤波的盲自适应多用户检测算法,用于CDMA多用户水声通信过程中遇到的多径、多用户多址干扰等问题的解决。在仿真分析中,设计了kalman盲自适应检测算法作为检测机对多用户水声通信过程中用户变化进行检测,对比了在同步、异步等多用户情况下的盲自适应检测效果,验证了算法的有效性。
1 基于改进Kalman滤波算法的盲自适应检测算法构建
Kalman滤波算法是一种状态域表达、可递推计算的滤波器,是一种高效率的递归滤波器(自回归滤波器), 它能够从一系列的不完全包含噪声的测量中,估计动态系统的状态,可以不加修改的用于稳定或不稳定环境。在收敛性和跟踪容量上,要好于LMS算法和RLS算法。本文采用该算法用于水声通信多用户盲自适应检测,以获得更高效的多用户检测。
1.1 改进的Kalman盲自适应检测算法构建
参照GSC(Generalized Sidelobe Canceler)的框架和限制线性检测机,根据初始目标用户1的扩频序列,给出单位响应,Kapoor[6]等专家给出了与LMS不同的线性检测机的表达式,关于用户1的典范表示:
(1)
其中:w1(n)为c1(n)的自适应部分,而N×(N-1)的矩阵C1,null的列组成了s1的零空间,即〈s1,C1,null〉=0。该表达式与LMS中使用的典范类似,所以可以获得:
(2)
(3)

(4)
将公式(2)代入(4)得到:
(5)

(6)

(1)状态矢量为wopt1(n),状态方程F(n+1,n)是一个N×N的单位阵,过程噪声是一个零矢量;
从传统动态系统模型和用户1动态系统规模的对应关系,利用标准Kalman算法,可以得到稳定态同步系统盲自适应多用户检测的Kalman算法:
(7)
(8)
(9)
(10)

(11)
其中:a为模型固定参数,v1(n)为过程零均值相关矩阵Q1的噪声矢量,因此,Kalman滤波算法可以改变成:
(12)
(13)
1.2 算法收敛性分析
在稳态条件下,我们得到信息矩阵更新方程如下:
(14)
根据给定的状态方程,在上式中取n=1,2,可以得到:
(15)
(16)
根据该过程,n=3,4,…, 可以得到如下的普遍形式:
(17)
设Rd=E{d(n)dT(n)},定义:
(18)
将初始值K(1,0)=I和公式(18)代入公式(17),可以得到:
(19)

(20)
在稳定CDMA水声通信系统中,当n足够大的时候,Kalman算法的平均输出能量ξ(n)通过证明,可以得到:ξ(n)≤ξmin(1+n-1N),其中,N为DS-CDMA的处理增益。
1.3 矩阵C1,null的求解
矩阵C1,null的求解采用了正交子空间投影法求解。正交空间是指由正交(向量内积)这个度量概念的空间,即被赋予对称双线性函数的空间,比如我们的空间就是正交空间。两个空间正交即高维空间的两个子空间里所有的向量在高维空间内互相正交。比如三维空间里的直线和与之垂直的平面就是三维空间的两个正交子空间。
2 模型仿真及结果分析
系统仿真构建了一个13个用户的同步多用户通信系统,设定用户1为目标用户。通信编码为扩频序列式n=5的gold序列(扩频增益为31),系统比特信噪比(Eb/N0)分别为:用户1的信噪比SNR1=0 dB;2-6用户信噪比为SNR2-6=10 dB;7-12用户信噪比为SNR7-12=20 dB;用户13的信噪比SNR13=30 dB,即存在很强的多址干扰。设信道噪声为高斯白噪声,噪声方差为σ2=0.01。
2.1 同步多用户检测
正常多用户检测情况,进行KF线性多用户检测机对目标信号的检测特性分析。目标用户及干扰用户信号接入顺序图如图 1所示。初始信号为目标用户1与多址干扰用户2~7同时发送;在400~900点数据段,通信状态变为目标用户1与多址干扰用户2、3同时发送;在900~1 500点数据段,通信状态变为目标用户1与多址干扰用户2~9同时发送;在1 500点数据结束段,通信状态变为目标用户1不再通信,而多址干扰用户2~13同时发送。所有信号传输过程始终存在高斯白噪声。
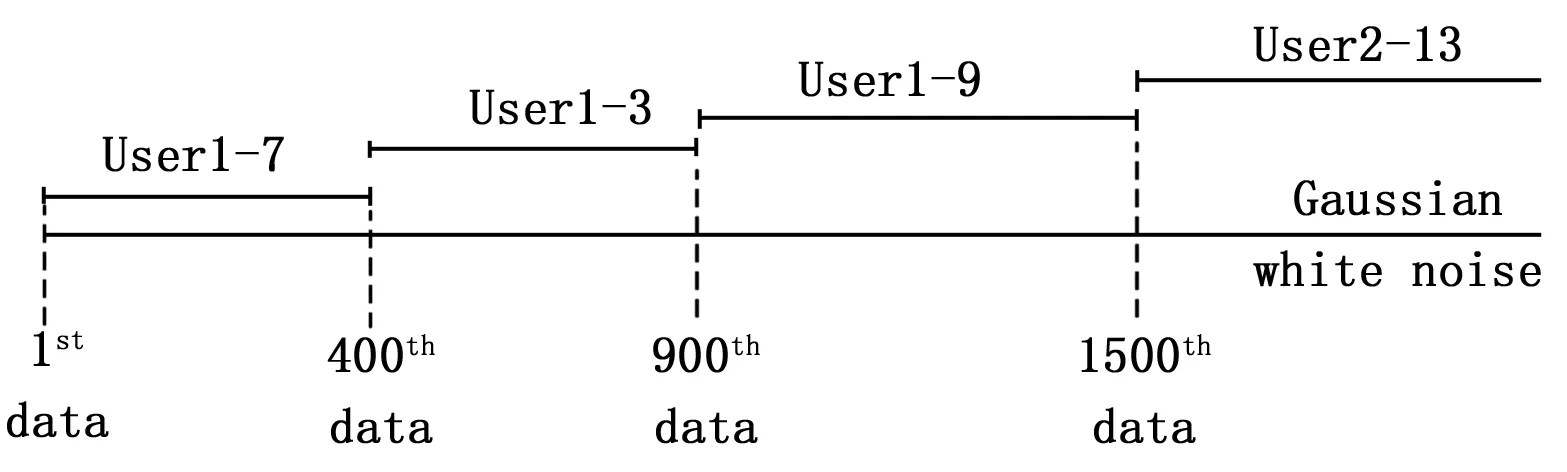
图1 同步多用户通信信号序列
传统Kalman盲多用户检测机及改进的Kalman盲多用户检测机对图 1所示的通信序列检测结果分别如图 2所示。从图中可以看出,两种Kalman算法均能够实现同步多用户通信时盲多用户检测,两种算法均都不需要训练序列的训练,可以直接进行盲检测。传统Kalman检测机的检测结果能够实现快速检测,而改进后的Kalman检测机可以实现通信用户变动时的自适应,而且当通信序列中含目标用户1时,检测的信干比具有较大提升,分别如图 2中的1~400和900~1 500点数据之间曲线所示,改进的Kalman检测机在1~400点数据的6个干扰用户影响下,检测信干比SIR从12 dB提升到18 dB,而900~1 500点数据的8个干扰用户影响下,检测信干比从9 dB提升到15 dB,检测性能具有明显提高。
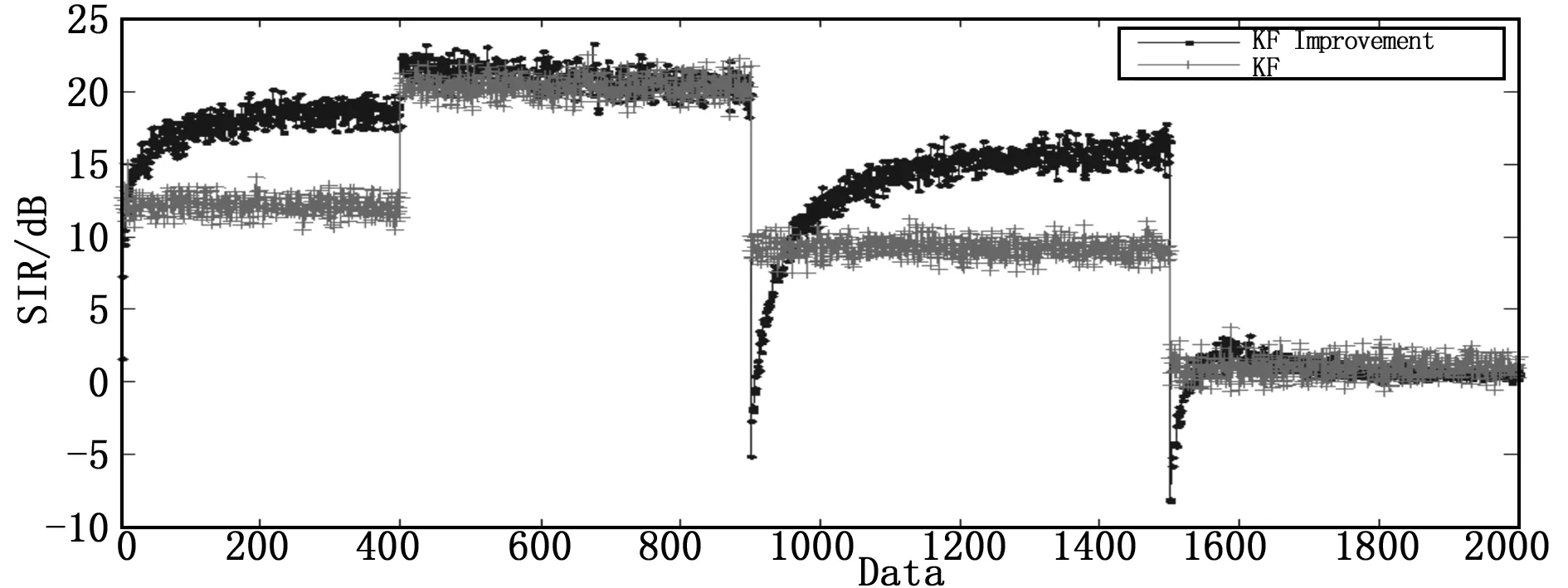
图2 传统Kalman算法与改进Kalman算法检测同步多用信号的SIR检测结果对比
2.2 异步多用户检测
对于异步信号情况,其检测流程与同步流程类似,仅解相关器由同步相关器更换为异步相关器。异步多用户检测仿真分析,目标用户仍为用户1,目标用户及干扰用户信号接入顺序图如图 3所示。初始信号为多址干扰用户3~7持续到1 200数据点;在300点数据时,目标用户1异步加入通信序列持续到1 200数据点;1 200数据到结束,用户2及用户8~13分别加入通信序列直到通信结束。所有信号传输过程始终存在高斯白噪声。
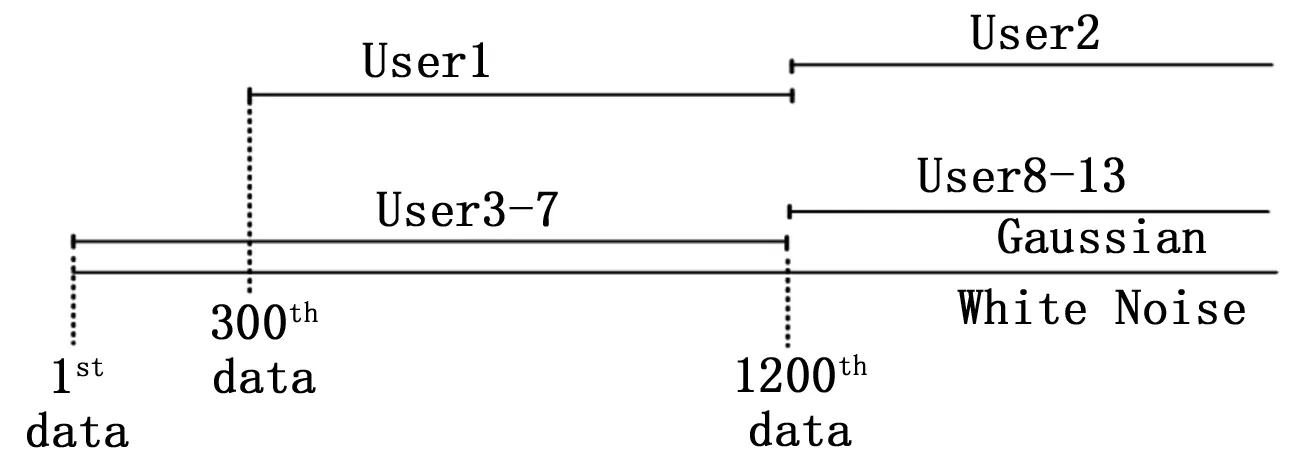
图3 异步多用户通信信号序列
传统Kalman盲多用户检测机检测及改进的Kalman盲多用户检测机对图 3所示的异步通信序列检测结果分别如图 4所示。从图中可以看出,与同步通信序列检测结果类似,两种Kalman算法均能够实现异步多用户通信时盲多用户检测,两种算法均都不需要训练序列的训练,可以直接进行盲检测。传统Kalman检测机的检测结果能够实现快速检测,而改进的Kalman检测机可实现通信用户变动时的自适应,而且当通信序列中含目标用户1时,检测的信干比具有较大提升,分别如图 4中的1~400和900~1 500点数据之间曲线所示,改进的Kalman检测机在1~400点数据的6个干扰用户影响下,检测信干比从12 dB提升到18 dB,而900~1 500点数据的8个干扰用户影响下,检测信干比从9 dB提升到15 dB,检测性能具有明显提高。
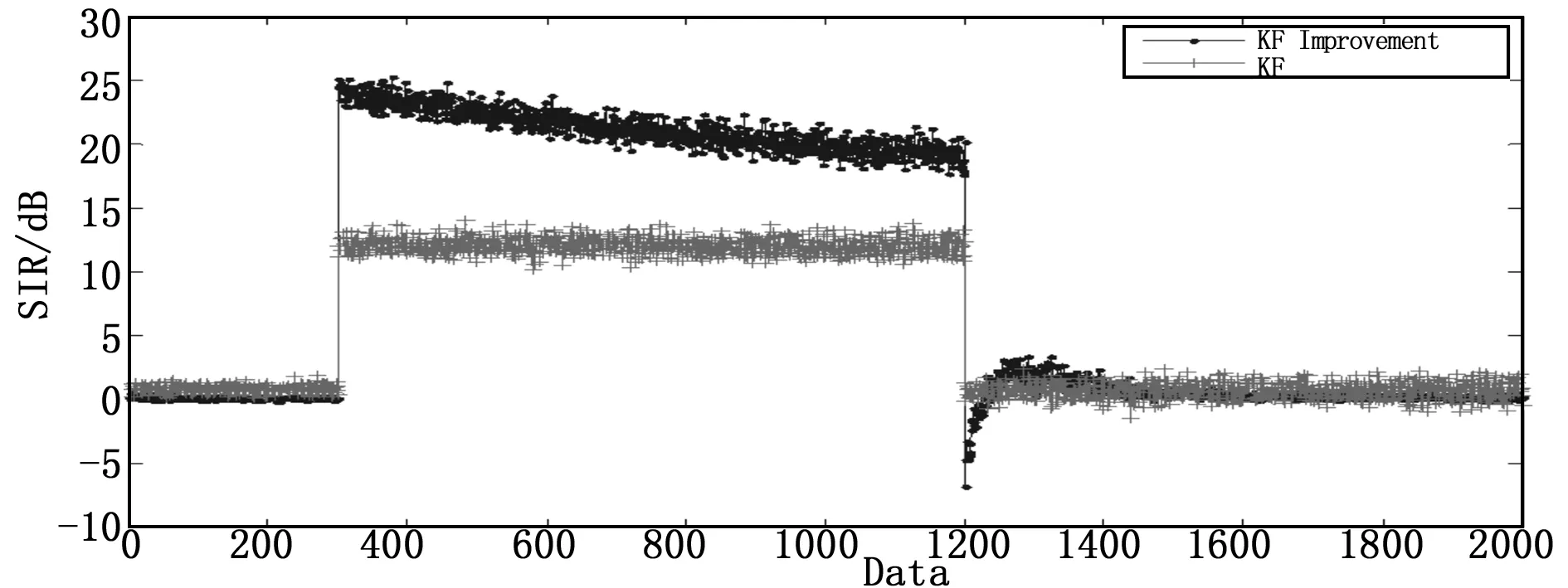
图4 传统Kalman算法与改进Kalman算法检测异步多用信号的SIR检测结果对比
3 结论
本文针对水声通信多用户检测提出了改进的Kalman线性盲多用户检测算法。分别通过同步多用户、异步多用户仿真实验分析,与传统Kalman盲多用户检测算法进行了比较。通过对比表明:
1)改进后的算法仍有较快的收敛速率,当多用户水声通信过程中用户数发生变化,可以快速的检测出用户的变化;
2)改进的Kalman线性盲多用户检测算法与传统Kalman检测算法对比,改进算法的检测结果的稳态输出信干比具有较大提升,最大可提高6 dB。
通过模型仿真分析对比,验证了改进Kalman算法的有效性。本文提出的改进Kalman多用户盲自适应检测算法及设计的多用户检测机不需要训练序列即可实现自适应过程,可以快速的实现收敛;系统在用户通信变化过程中可以自动跟踪、迅速达到收敛。该检测算法的提出及检测准则的对比应用,对于水下多用户检测、区分,准确、稳定的实现基于CDMA协议的快速水声通信具有重要指导意义。
[1] 许肖梅. 水声通信与水声网络的发展与应用[J]. 声学技术, 2009, 28(6): 811-816.
[2] 魏 昕,赵 力,李 霞,等. 水声通信网综述[J]. 电路与系统学报. 2009, 14(6): 96-104.
[3] Cui H J, Kong J J, Gerla M, et al. Challenges: Building Scalable and Distributed Underwater Wireless Sensor Networks (UWSNs) for Aquatic Applications [R]. University of Connecticut Technical Report UbiNet-TR05-02, 2005, 12.[4] 邬冬临,刘宏立,刘述钢. 基于子空间跟踪的盲自适应多用户检测技术研究[J]. 计算机测量与控制,2009, 17(09): 1701-1704.
[5] Akyildiz I F, Pompili D, Melodia T. Underwater acoustic sensor networks: research challenges [J]. Ad Hoc Networks(Elsevier), 2005, 3: 257-279.
[6] Kapoor S, Gollamudi S, Nagaraj S, et al. Adaptive multiuser detection and beamforming for interference suppression in CDMA mobile radio systems [J]. IEEE Transactions on Vehicular Technology. 1999, 5(5-48): 1341-1355.
[7] Haykin S. Adaptive filter theory [M]. 5th Edition, Prentice Hall, 2013.
Blind Adaptive Multi-User Detection Method for Underwater Acoustic Communication Based on Improved Kalman Filter
Li Yang1,Cao Zili2,Wang Hongru3,Wang Zhongqiu3
(1.Chinese people’s Liberation Army 91872 Troop,Beijing 102442,China;2.Navy equipment repair and maintenance room in Qingdao area,Qingdao 266001,China;3.Shandong Academy of Sciences, Shandong Provincial Key Laboratory of Ocean Environment Monitoring Technology, Qingdao 266001, China)
In order to solve multi access interference (MAI) effect of multi-user blind detection in underwater acoustic communication networks, blind adaptive multi-user detection method based on improved Kalman filter algorithm was proposed. This method can suppress the MAI problem when the user number increases. Simulation was done for both traditional Kalman method and improved Kalman method in synchronous and asynchronous multi-user communication case, the simulation results show that the improved Kalman detection algorithm does not require training sequences that can realize synchronous and asynchronous communication state of multiple underwater acoustic target users of blind adaptive detection, improved Kalman filter algorithm can get higher SIR in target detection than the traditional algorithm by 6 dB in maximum. The new algorithm is of great significance for accuracy and stability of underwater acoustic communication based on CDMA protocol in multiuser detection and differentiation.
Kalman filter; multiuser detection; blind adaptive; acoustic communication
2015-11-16;
2016-01-07。
山东省重点研发计划项目(2015GSF115018)。
李 杨(1978-),男,湖北石首人,硕士,工程师,主要从事舰船电子装备维修保障方向的研究。
1671-4598(2016)06-0155-03
10.16526/j.cnki.11-4762/tp.2016.06.042
TB567
A