定子永磁型步进电动机结构原理及分析计算
2016-11-16鲁炳林徐衍亮
鲁炳林 徐衍亮
(山东大学电气工程学院 济南 250061)
定子永磁型步进电动机结构原理及分析计算
鲁炳林徐衍亮
(山东大学电气工程学院济南250061)
为提高混合式步进电动机(HSM)的运行性能,彻底消除其转子放置永磁体的结构弊端,提出了一种定子上放置永磁体的新型步进电动机(SPMSM),其工作原理与HSM完全相同,但结构更为简单,转矩/功率密度及效率更高。对SPMSM的运行原理及所采用的关键技术进行了分析,并与DSPM电动机进行了比较。同时,基于步进电动机归一化设计思想,并结合SPMSM磁场呈二维分布的特点(忽略电动机端部效应),提出了适用于SPMSM的归一化分析计算方法,并对其磁链、电动势、转矩及功率进行了计算。试制了一台2相8极50齿SPMSM样机,通过实验验证了其工作原理的实际可行性。有限元仿真与实验结果表明,所采用的理论分析方法及所建立的功率方程能较好地反映SPMSM的实际特性,且具有较强的适用性,为该类步进电动机的设计和分析提供了参考。
定子永磁型步进电动机运行原理归一化分析有限元仿真样机实验
0 引言
步进电动机因具有转矩刚度大、定位稳定可靠、跟踪准确度高、可开环运行以及无累计误差等优点,在20世纪70年代迅速发展,广泛应用于计算机外设、办公自动化及工业设备和装置中,并于80年代达到高峰,成为数控系统中运控电动机的主体[1,2]。其后随着无刷直流电动机、数字化交流伺服电动机及双凸极电动机的发展和成熟[3-6],步进电动机的发展受到限制。如何进一步推动和发展步进电动机,成为步进电动机工作者面临的研究课题。
混合式步进电动机(Hybrid Stepping Motor,HSM)综合了磁阻式步进电动机和永磁式步进电动机的优势,已成为步进电动机发展的主流方向,特别在装备制造业中,所用到的步进电动机几乎都是混合式步进电动机[7]。然而,即使对于HSM,其功率密度、转矩密度、调速范围、过载能力、运行效率也难以与无刷直流电动机及交流伺服电动机相媲美,究其原因,除了步进电动机经常采用的恒电流控制及本质上的高频驱动外,其转子放置轴向充磁永磁体的结构构造缺陷是重要因素。为了提高HSM的运行性能,文献[8]分析了一种在普通HSM定子齿槽中放置永磁体的增强型混合式步进电动机。文献[9]提出了在普通HSM定转子齿槽中均放置永磁体的超强型混合式步进电动机。文献[10]提出了一种用于HSM的新型转子磁路结构。以上几种改进后的结构都能显著提高HSM的功率密度、转矩密度、过载能力及动态性能,但转子上放置永磁体的结构弊端仍存在,同时更增加了电动机的制造难度和成本。
另一方面,近来随着双凸极永磁(Doubly-Salient Permanent Magnet,DSPM)电动机[11]、磁通反向永磁(Flux Reversal Permanent Magnet,FRPM)电动机[12]及磁通切换永磁(Flux-Switching Permanent Magnet,FSPM)电动机[13,14]的提出、发展和成熟,定子永磁型电动机[15,16]逐步成为研究热点。初步研究表明,此类电动机因永磁体放置于定子上而具有诸多优越性(如转子结构简单、永磁体散热容易、功率密度及效率较高等),具有良好的应用及发展前景。然而,对于同样采用双凸极定转子结构的步进电动机,目前通用的形式仍为转子放置永磁体结构,尚未见文献涉及对定子永磁型(转子无永磁体)结构步进电动机的研究。
本文通过借鉴DSPM电动机的结构形式[17,18],针对传统转子永磁型HSM的不足,提出了一种定子永磁型步进电动机(Stator-Permanent-Magnet Stepping Motor,SPMSM),并对其进行了理论分析计算及实验研究,该种电动机兼具步进电动机和定子永磁型无刷电动机的特征。首先给出其基本结构特征,对其运行原理及关键技术进行了分析,并与DSPM电动机进行了比较;进而推导了功率方程,并提出适用于SPMSM的归一化分析计算方法,对其磁链、电动势、转矩和功率进行了计算;最后试制了一台2相8极50齿SPMSM样机,通过有限元仿真和样机实验验证了理论分析及计算的正确性。
1 SPMSM结构及特征
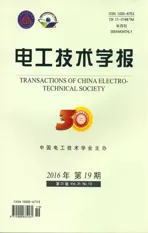
本文所提出的新型SPMSM如图1所示,其基本结构特征为:永磁体对称放置于定子轭部,沿切向充磁,相邻两永磁体充磁方向相反;相邻两永磁体之间包含2m或m(仅当m为5的倍数时)个定子磁极,并与相应的电枢绕组共同构成基本电动机单元;在基本电动机单元中,同一相绕组所在两个磁极的定转子齿相对位置互错1/2转子齿距,且线圈绕制方向相反,抑或同一相绕组仅包含单个磁极。
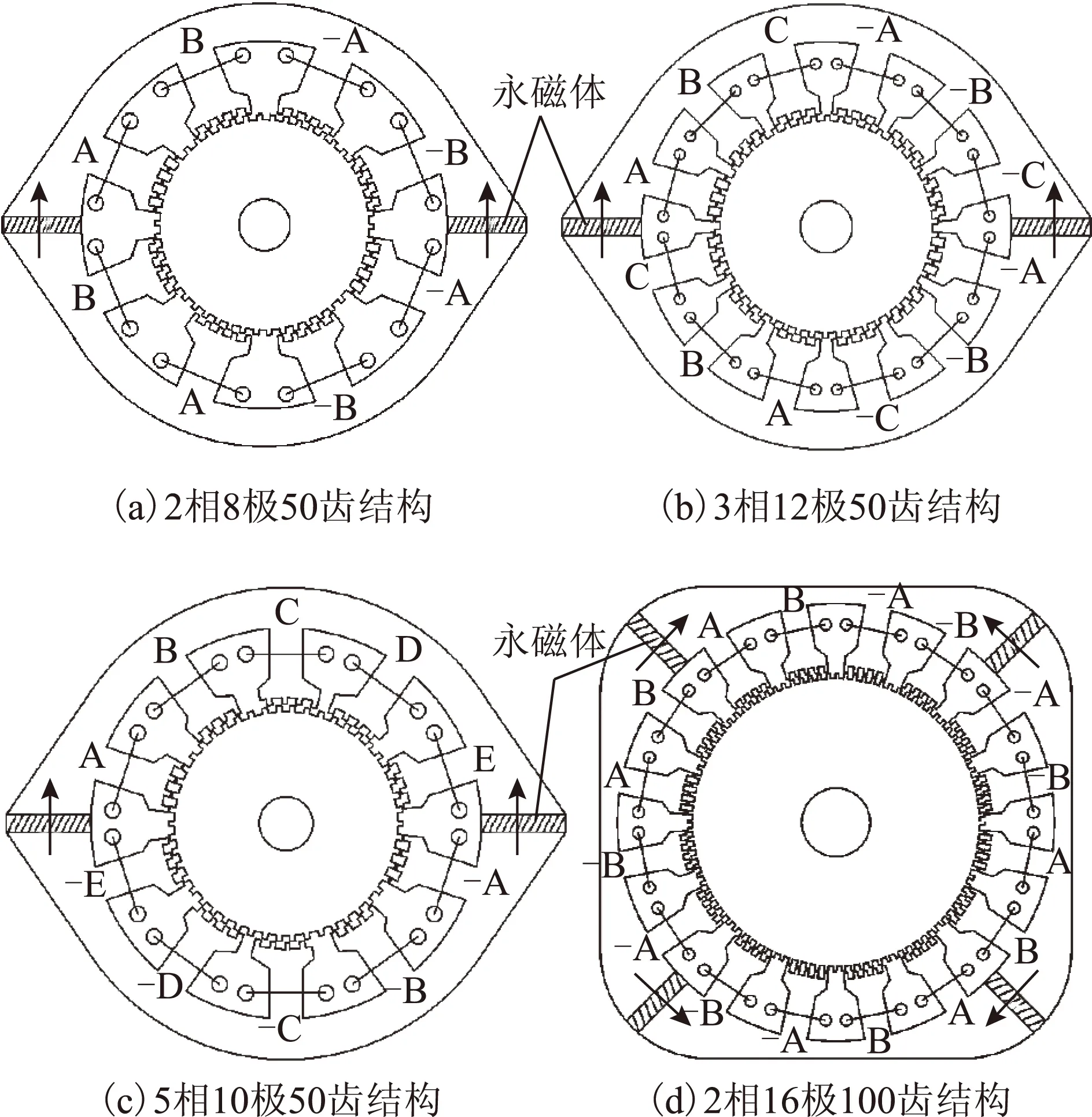
图1 定子永磁型步进电动机结构Fig.1 Constructions of stator permanent magnet stepping motors
同HSM,SPMSM可采用多种组合形式[19]。假设SPMSM定子相数为m,每相包含定子磁极数量为j,转子齿数为Zr,永磁体数量为n,当上述参数满足如下条件时,即可保证SPMSM正常运行。
1)当m不是5的倍数时,j必须是4的倍数。
(1)
(2)
2)当m为5的倍数时,j必须是偶数。
(3)
(4)
尽管SPMSM与HSM的结构不同,但两者本质上工作原理相同,通过分析比较两者的等效磁路模型可得出这一结论。此外,同其他定子永磁型无刷电动机[16],SPMSM因永磁体放置于定子上而具有诸多优越性,彻底消除了传统HSM转子放置永磁体的结构弊端,并降低了电动机的加工难度和制造成本,具有一定的理论研究意义和实际应用价值。
2 SPMSM运行原理及关键技术
2.1SPMSM与DSPM电动机运行原理比较
SPMSM基本结构与定子永磁型DSPM电动机类似,两者同属定子永磁型电动机,具有很多共性,如永磁体和电枢绕组均位于定子,定、转子呈凸极结构,转子铁心只有一段、结构简单,电枢绕组多为集中绕组等。然而,前者实质属于“步进电动机(定子永磁体励磁”结构,后者实质属于“开关磁阻电动机(定子永磁体励磁”结构,两者的运行原理存在明显不同。图2给出了两种电动机一相绕组的永磁磁链、永磁电动势和电流随转子位置角变化的曲线。

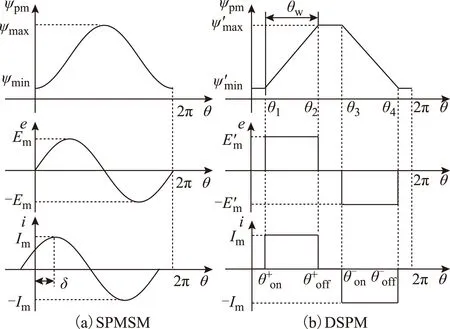
图2 电动机永磁磁链、永磁电动势及理论电流波形Fig.2 Motor’s PM flux linkage,PM EMF and theoretical current waveforms
根据图2,SPMSM单相永磁磁链、永磁电动势及电枢电流可分别表示为
(5)
(6)
i=Imcos(θ-δ)
(7)
式中,θ为转子位置角(电角度);Zr为转子齿数;ωr为机械角速度;Em为永磁电动势幅值;Im为电流幅值。DSPM电动机的单相永磁电动势幅值可表示为
(8)式中,θw为正、负半周通电时间,θw=θ2-θ1=θ4-θ3;pr为转子极数。根据机电能量转换原理,电磁转矩可表示为
(9)
式中,θm为转子机械位置角;W′(ip,θ)为电动机的磁共能;I为各相绕组电流,I=[ia,…,im]T;ψpm为各相绕组永磁磁链,ψpm=[ψpma,…,ψpmm]T;L为电感矩阵;Wpm为永磁磁场储能。第1项为永磁转矩,是转矩的主要分量;第2项为磁阻转矩,一个周期内平均值近似为零;第3项为定位力矩。根据图2及式(5)~式(9),可以推出SPMSM及DSPM电动机m相绕组通入对称电流时的平均永磁转矩大小分别为
(10)
(11)
根据上述理论分析,SPMSM与DSPM电动机的运行原理主要差别在于:前者采用恒幅值给定电流的电流闭环、速度/位置开环控制策略,当负载变化时,电流幅值不变,但电流与转子永磁磁链的相对相位发生变化,导致转矩角δ发生变化,从而达到转矩平衡;后者采用恒开通关断角给定电流的电流、速度/位置闭环控制策略,当负载变化时,电流幅值相应发生变化,从而达到转矩平衡。
此外,SPMSM通常设计为多极对数的小齿结构,开环定位准确度高、调速范围小,既可作为微小功率定位执行机构,亦可作为中、大功率机电能量转换机构,一般适用于低速大转矩经济适用型场合;DSPM电动机通常设计为少极对数的大齿结构,闭环调速范围广、运行效率高,多用于机电能量转换领域(如电动汽车领域等[15,16])。
2.2SPMSM关键技术
类似于HSM,SPMSM所采用的关键技术为微步驱动技术[21]。微步驱动技术是一种电流波形控制技术。其基本思想是控制每相绕组电流的波形,使其阶梯上升或下降,即在0和最大值之间给出多个稳定的中间状态,定子磁场的旋转过程中也就有了多个稳定的中间状态,对应于电动机转子旋转的步数增多、步距角减小。
以2相SPMSM为例,应用微步驱动技术时的绕组电流波形变化如图3所示。由此得到的定子磁场矢量的步进旋转大致如图4所示,得到每循环(齿距)16步的步进运动。驱动器每输入一个脉冲信号,定子磁场即可旋转1/16齿距角,并带动转子转过相同的角度。因此,电动机转子转过的位置正比于输入脉冲数量,且无累积误差,电动机转速正比于输入脉冲的频率,通过控制驱动器输入脉冲的数量和频率,即可方便实现电动机的定位和调速。
图3 微步驱动给定电流波形Fig.3 Given current waveform for subdivided driving
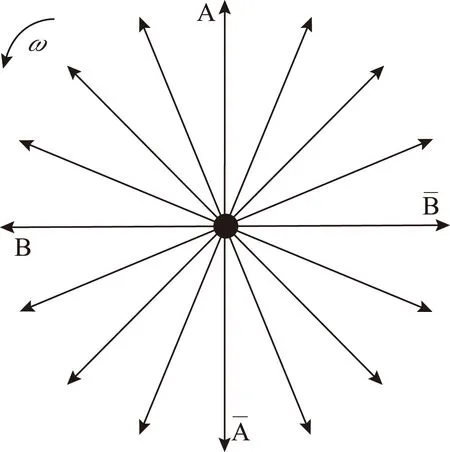
图4 定子磁场矢量旋转示意图Fig.4 Stepping rotation of stator magnetic field vector
微步驱动是跟踪给定电流波形的相绕组电流闭环控制。控制电路根据预先存储的电流给定波形和输入控制脉冲序列状态,实时给出当前步各相绕组电流的给定值与电流反馈值比较,从而改变主电路MOSFET驱动脉冲宽度,控制相绕组电流为给定值。采用电流波形控制技术后,可以方便地实现微步驱动,即使相数少的电动机,也可以提高分辨率,在必要时可以很高,达到“类伺服”特性。
3 功率方程计算
对于2相SPMSM,在静止坐标系下,各绕组的电压方程可表示为
(12)
进一步可得单相(如A相)电压方程为
(13)
式中,第二项为变压器电动势;第三项为旋转电动势。根据图2a,式(13)可进一步写成
ua=RaImcos(ωt-δ)+
[-Laasin(ωt-δ)+Labcos(ωt-δ)]ZrωrIm+
(14)
可见,转矩角δ的选取对相电压瞬时值u(t)及有效值U的大小均有影响。为了方便计算,可引入电压系数ke=U/E[18],其定义为δ=π/2时(对应最大输入功率)电动机相电压与空载反电动势有效值之比。
假设驱动电路开关器件导通频率足够大,电动机在低速运行条件下电流波形不发生严重畸变,同时假设微步驱动电流阶梯数足够多,电流波形接近于理想正弦波。根据图2a和第2节分析的SPMSM运行原理,可推导出电动机输入功率方程为
(15)
式中,I为电流有效值;Ti为电流周期,Ti=θr/ωr;θr为转子齿距角,θr=2π/Zr;tδ为与转矩角δ对应的时间。P1可进一步表示为
P1=mkeEIsinδ
(16)
为了弥补将式(14)绕组电阻压降忽略带来的误差,可对式(16)进行修正,得到
P1=mkeEIsinδ+PCu
(17)
式中,PCu为电动机铜耗,且在假设前提条件下有
PCu=mI2R
(18)
4 归一化分析计算
通过上述理论分析可知,为使SPMSM的电磁性能及功率方程计算更为准确,需准确获得其相绕组永磁磁链变化幅值Δψpm=ψmax-ψmin。然而,考虑到气隙区域结构的复杂性及铁心磁路饱和的影响,难以通过解析法对Δψpm进行准确计算。此外,尽管采用有限元法或场路结合法可精确获得Δψpm的值,但却难以直观反映电动机内部各物理量之间的电磁关系。鉴于此,并同时考虑到步进电动机所特有的结构类型及尺寸型号多样性特点,需寻求一种相对精确且具有一定通用性的解析计算方法对SPMSM进行分析计算。本文通过借鉴步进电动机归一化设计思想[22],并结合SPMSM磁场呈二维分布的特点(暂不考虑电动机端部效应),提出了一种适用于SPMSM的归一化分析计算方法。
若Npole为每极绕组匝数,Zs为每极定子齿数,Δφt为单个齿层永磁磁通最大值φmax与最小值φmin的差值。根据SPMSM基本结构特征及运行原理,当忽略齿层之外其他部分的铁心饱和影响时,可得到Δψpm与Δφt的关系为
Δψpm=jNpoleZsΔφt
(19)

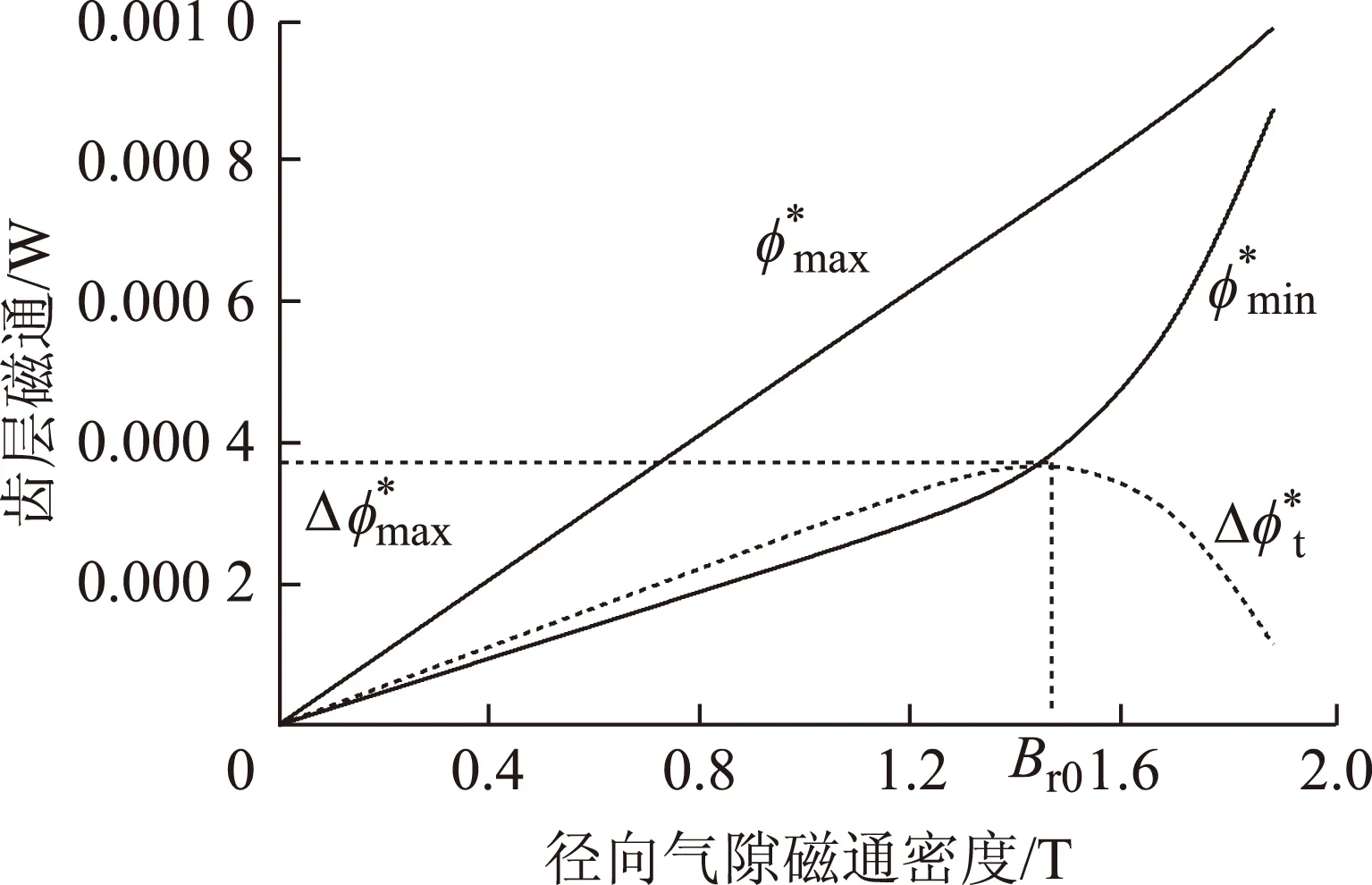
图5 齿层磁通曲线Fig.5 Tooth-layer flux curves

(20)
(21)
若实际永磁气隙磁通密度为Brpm,定子内径为Dsi(单位:mm),定转子齿距为πDsi/Zr,定转子铁心长度为le,相绕组串联匝数为Nph=jNpole。基于式(5)、式(6)、式(9)、式(19)及图5,可得到相绕组空载永磁磁链变化幅值、空载永磁反电动势幅值及单相通入直流电Idc时的永磁转矩幅值表达式分别为
(22)
(23)
(24)
由式(23)可得到空载反电动势有效值E,带入式(17)即可得到电动机输入功率P1为
(25)
5 有限元仿真及实验验证
为了验证SPMSM工作原理的实际可行性及理论分析的正确性,试制了一台2相8极50齿SPMSM样机,如图6所示,其主要参数见表1。
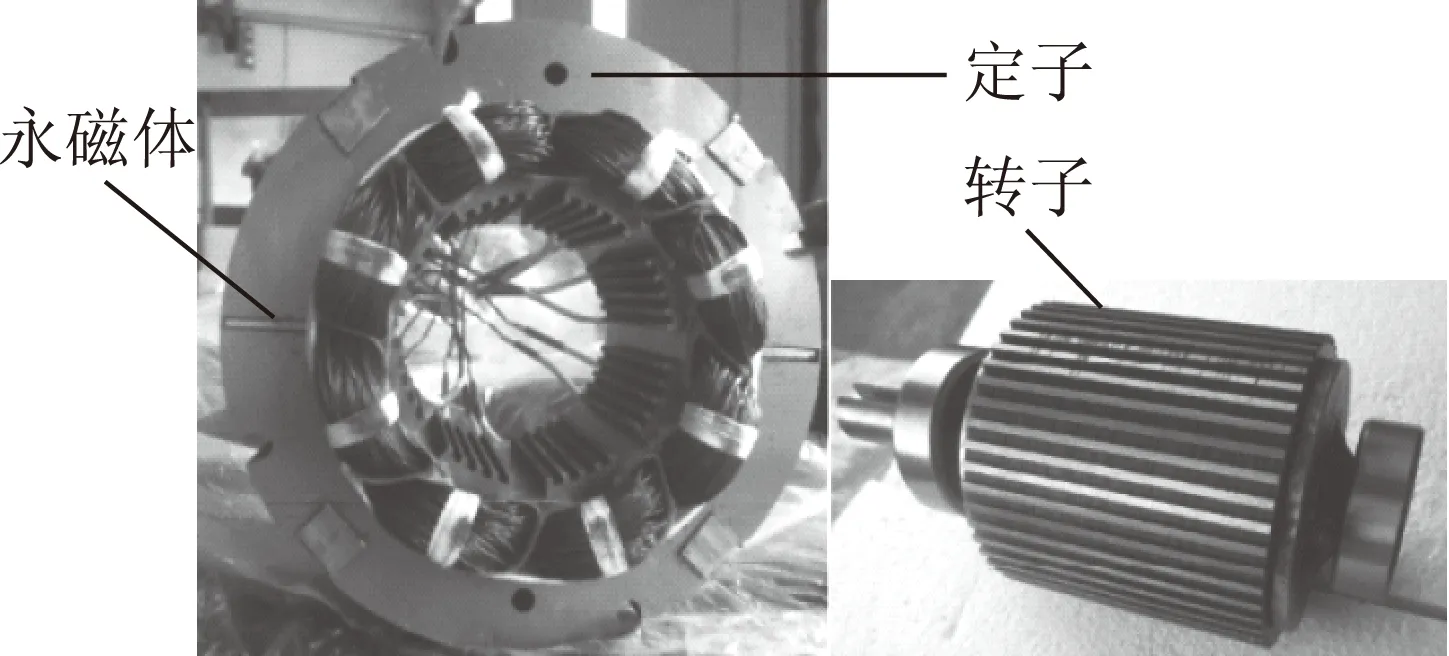
图6 SPMSM样机实物Fig.6 Prototype of the SPMSM
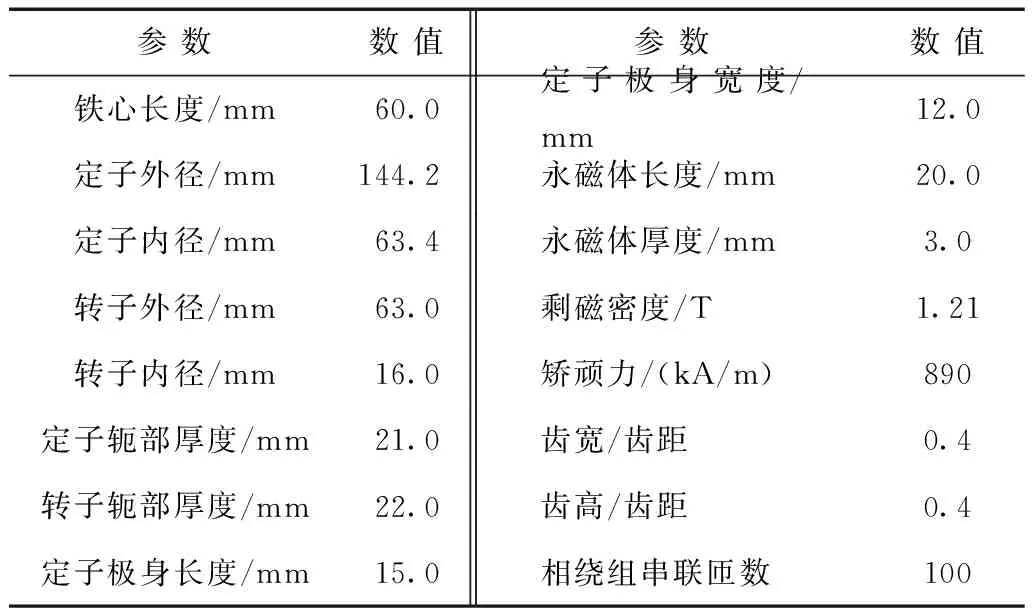
参数数值参数数值铁心长度/mm60.0定子极身宽度/mm12.0定子外径/mm144.2永磁体长度/mm20.0定子内径/mm63.4永磁体厚度/mm3.0转子外径/mm63.0剩磁密度/T1.21转子内径/mm16.0矫顽力/(kA/m)890定子轭部厚度/mm21.0齿宽/齿距0.4转子轭部厚度/mm22.0齿高/齿距0.4定子极身长度/mm15.0相绕组串联匝数100
利用MTS-II电动机测试系统,对SPMSM样机进行稳态性能测试的装置如图7所示。实验中所用微步距细分驱动器型号为2M2280,可通过设置不同电流档位进行实验。磁滞测功机与MTS-II电动机测试系统连接在一起,可以测量电动机转速、转矩、输入/输出功率、效率及功率因数等性能参数。借助示波器电流钳,电动机的空载反电动势和相绕组电流波形可由示波器直接显示,并可读出电流有效值。
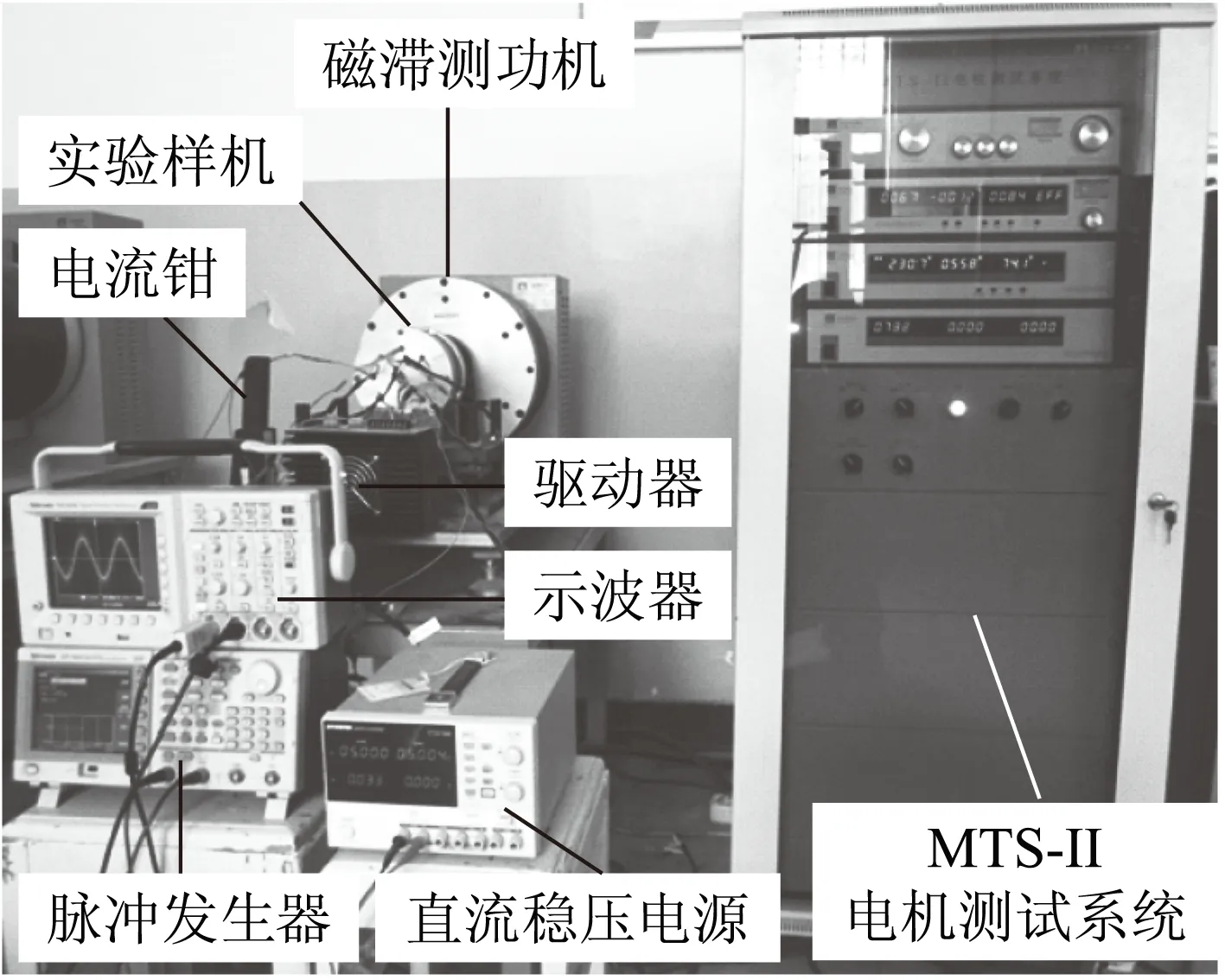
图7 样机实验装置Fig.7 Experimental equipment for the prototype
5.1空载反电动势及转矩验证
通过对SPMSM样机进行2D-FEM仿真计算和解析计算,得到了图8所示的单相通电(通入4 A直流电)矩角特性曲线以及图9所示的n=250 r/min时的单相空载反电动势曲线。可以看出,解析计算结果与2D-FEM计算结果幅值接近,验证了所提出的SPMSM归一化分析计算方法的正确性和有效性。然而,两者幅值及波形均存在差异,原因在于理论分析计算中忽略了铁心磁路饱和、磁链及电压电流非正弦等多种因素的影响。因此,对SPMSM所做特性分析和所提出的设计方法,只能用于此类电动机性能的定性分析和初步电磁设计,分析计算结果的准确性需通过有限元方法进行验证。
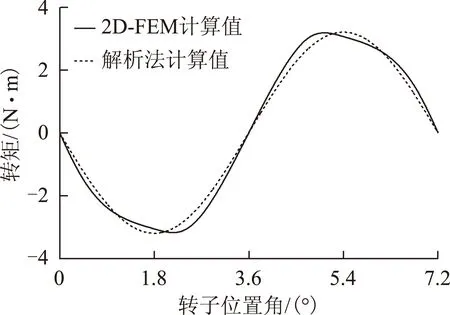
图8 计算矩角特性曲线Fig.8 Calculated torque-angle characteristic
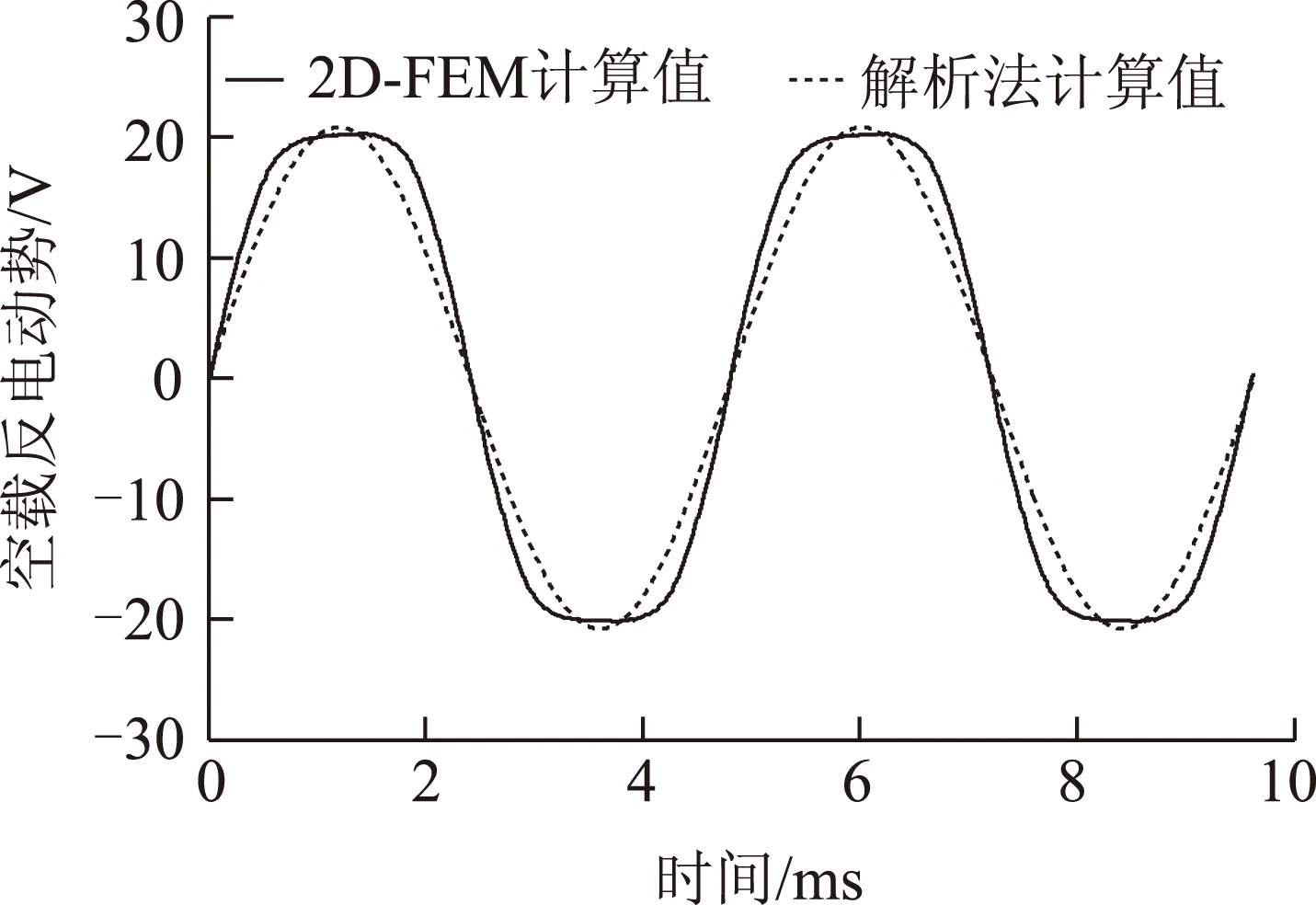
图9 计算空载反电动势波形Fig.9 Calculated no-load back EMF waveform
图10为n=250 r/min时实测的空载反电动势波形,可以看出,实验实测值略小于有限元仿真计算值,且两者较接近。一方面说明忽略电动机端部效应后所得2D-FEM计算值比实际值偏大,另一方面说明端部效应对于SPMSM的电磁性能影响较小,这也是SPMSM不同于DSPM电动机的特点之一。此外,为使有限元计算结果更加精确,可采用3D“一步法”[20]对电动机端部效应进行分析,并得到端部漏磁系数kend对2D-FEM计算结果进行修正。
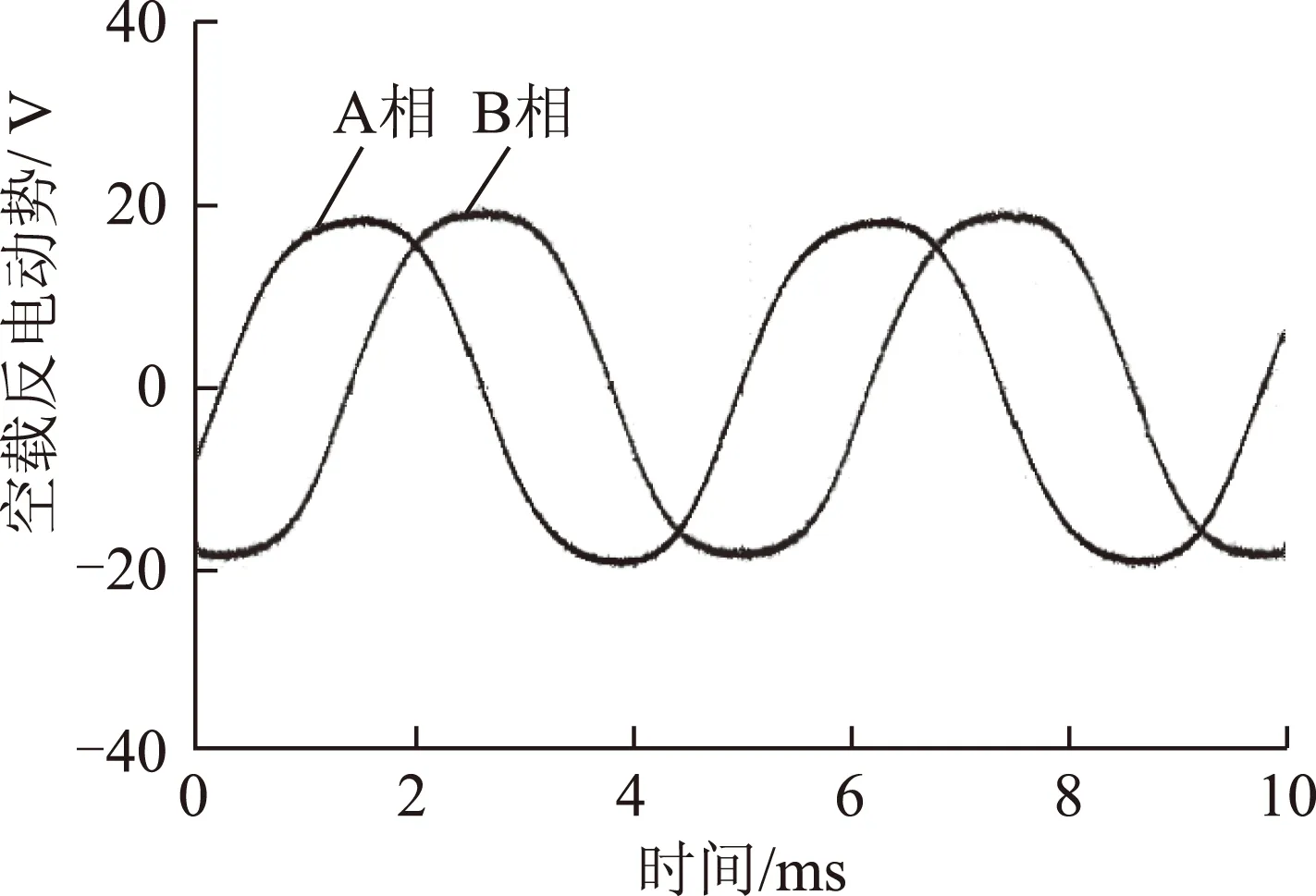
图10 实测空载反电动势波形Fig.10 Measured no-load back-EMF waveforms
5.2功率方程验证
在第3节的理论分析中,输入功率计算公式(15)~(18)是基于电枢电流波形不发生严重畸变的前提条件推导得出的,因而在进行理论验证之前,有必要对电枢电流的实际变化情况进行实验研究,在此假设电枢电流不发生严重畸变的条件等价于电流幅值基本保持恒定。图11为驱动器不同电流档位(间隔为0.7 A)下,实测空载电流幅值随转速变化的曲线,可认为图中虚线以左区域的电流波形未发生严重畸变。
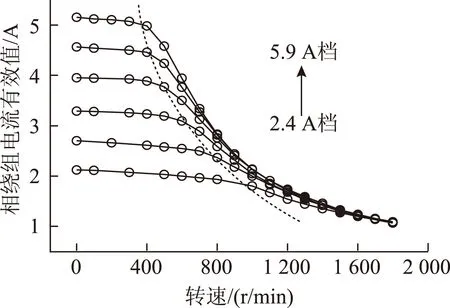
图11 实测电枢电流有效值Fig.11 Measured RMS value of phase winding current
以驱动器设置3.8 A档为例,由图11可知,当n<600 r/min时电流波形不会发生严重畸变。图12为转速n=100 r/min及驱动器设置为3.8 A档、16细分时的实测相绕组电流波形。假设只考虑电磁转矩基波分量,当电动机输出最大转矩时的输入功率最大,对应的转矩角为δ=π/2。图13为电动机最大输入功率的实测值以及由式(25)得到的理论计算值。实验中采用电阻分析仪测得绕组电阻为R=0.64 Ω,并取ke=1.4。
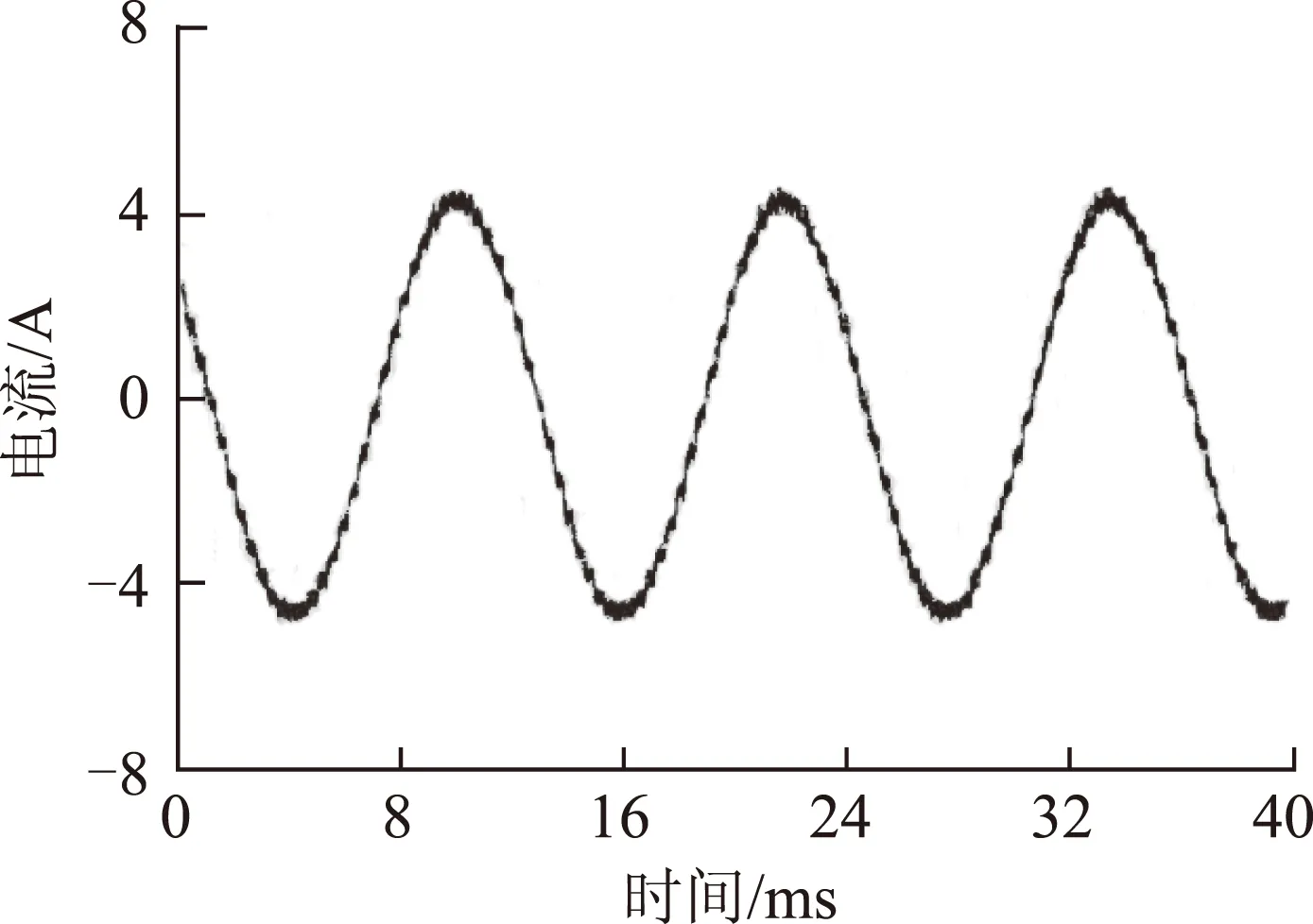
图12 实测相绕组电流波形Fig.12 Measured waveform of phase winding current
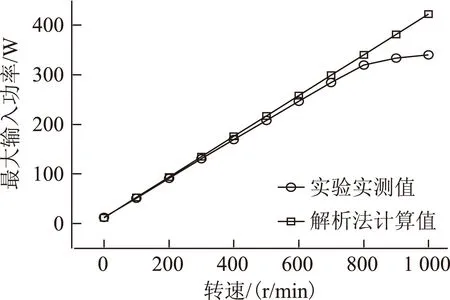
图13 电动机最大输入功率Fig.13 Motor’s maximum input power
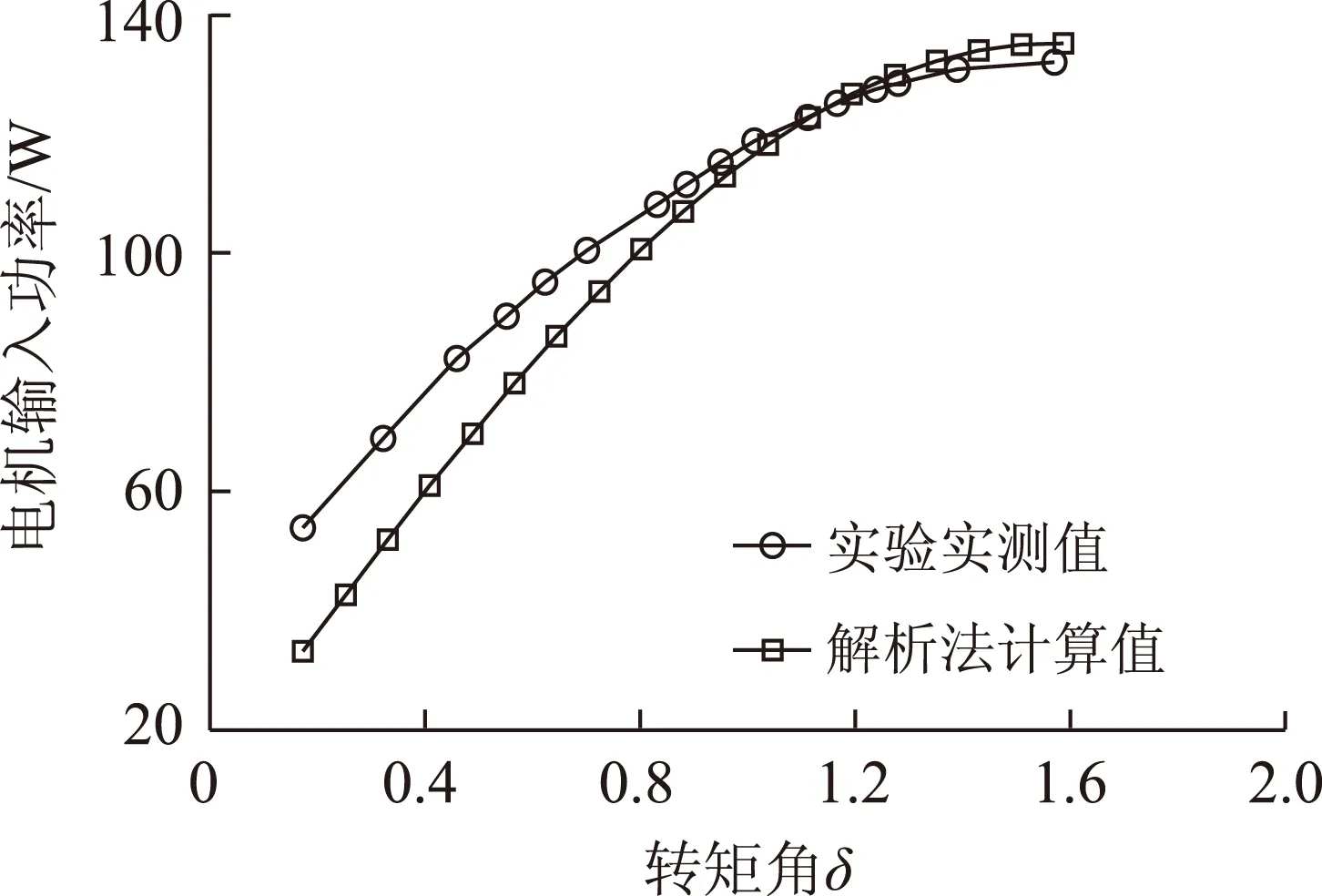
图14 不同负载下电动机输入功率Fig.14 Motor’s input power under different loads
由图13可以看出,当n<600 r/min时,解析计算值与实测值非常接近,验证了功角δ=π/2时式(25)的正确性。此外,当选取3.8 A档、n=300 r/min时,可得到不同负载(对应转矩角δ=0~π/2)下电动机输入功率随转矩角δ变化的曲线,如图14所示。其中,δ的确定如下:根据式(10)及式(22),得到样机两相通电时的平均永磁转矩为
(26)
若只考虑电磁转矩的永磁转矩分量,电动机稳态运行时的转矩平衡方程为
Tpm,avg=TL+Bωr
(27)
式中,TL为实际施加负载;B为粘滞摩擦系数,并取B=0.001。根据式(26)和式(27),即可得到δ的表达式为
(28)
综合分析图13及图14,可作出如下解释:kend及ke的选取可使得不同转速下电动机最大输入功率(对应转矩角δ=π/2)的理论计算值与实测值相符,但却不能弥补整体负载范围内(δ=0~π/2)转矩、反电动势波形的非正弦性(如图8、图9所示)带来的计算误差。事实上,在对SPMSM进行初步电磁设计时,往往更关心电动机的极限带载能力,与此相对应的是电动机的最大输入功率,因而式(25)建立的功率方程仍具有一定的实践意义。
6 结论
本文提出一种新颖结构的定子永磁型步进电动机(SPMSM),彻底消除了传统混合式步进电动机(HSM)转子放置永磁体的结构弊端,通过理论分析、有限元仿真和实验结果验证,得到以下结论:
1)SPMSM与HSM工作原理完全相同,且具有结构简单、加工制造容易、功率密度/转矩密度高、运行效率高、永磁体散热容易及利用率高的优势,既可用于传统HSM的小功率定位传动领域,也可用于大功率机电能量转换领域。
2)SPMSM与DSPM电动机同为定子永磁型电动机,两者既有共同性亦存在差异性,两者的差异性主要体现在运行原理和控制方式不同,可根据实际应用场合提出的具体要求对两种电动机进行选择。
3)所采用的SPMSM理论分析计算方法体现了步进电动机归一化设计思想,具有较强的适用性,为初步分析比较不同结构、不同尺寸型号的SPMSM电磁特性提供了有利工具;同时,基于所建立的SPMSM功率方程,可进一步推导其尺寸方程,为电动机初步电磁设计奠定了基础。
[1]陈敏详,阮国贤,关仁元,等.步进电动机——发展之路与产品开发初探[J].微电机,2012,45(11):67-73.
Chen Minxiang,Ruan Guoxian,Guan Renyuan,et al.Stepping motor——the road of development and product development trial[J].Micromotors,2012,45(11):67-73.
[2]王宗培,段卫国.运动控制电机之步进电机[J].微电机,2008,41(9):61-68.
Wang Zongpei,Duan Weiguo.Stepping motor-motion control motor[J].Micromotors,2008,41(9):61-68.
[3]夏长亮,方红伟.永磁无刷直流电机及其控制[J].电工技术学报,2012,27(3):25-34.
Xia Changliang,Fang Hongwei.Permanent-magnet brushless DC motor and its control[J].Transactions of China Electrotechnical Society,2012,27(3):25-34.
[4]刘爱民,张金华,娄家川,等.新型凸极式转子无刷电励磁直流电机设计与分析[J].电工技术学报,2015,30(14):525-531.
Liu Aimin,Zhang Jinhua,Lou Jiachuan,et al.Design and analysis of a novel salient-pole rotor electrical excitation brushless DC motor[J].Transactions of China Electrotechnical Society,2015,30(14):525-531.
[5]莫会成,闵琳.现代高性能永磁交流伺服系统综述—传感装置与技术篇[J].电工技术学报,2015,30(6):10-21.
Mo Huicheng,Min Lin.Summary of modern high performance permanent magnet AC servo system—sensor device and technology[J].Transactions of China Electrotechnical Society,2015,30(6):10-21.
[6]孟小利,严仰光.双凸极电机的发展及现状[J]南京航空航天大学学报,1999,31(3):330-337.
Meng Xiaoli,Yan Yangguang.Review for development of a double salient variable speed permanent motor[J].Journal of Nanjing University of Aeronautics & Astronautics,1999,31(3):330-337.
[7]杜宗潆.混合式步进电动机全球市场发展简况[J].微特电机,2013,41(2):63.
Du Zongying.History of global market of hybrid stepping motors[J].Small & Special Machines,2013,41(2):63.
[8]王宗培,李兴根.增强型混合式步进电动机齿层磁场的标量位分析模型[J].电工技术学报,1990,5(3):21-27.
Wang Zongpei,Li Xinggen.A scalar potential analysis model of the tooth layer magnetic field in the enhanced hybrid stepping motors[J].Transactions of China Electrotechnical Society,1990,5(3):21-27.
[9]王宗培,陈敏详,阮国贤.超强型新结构混合式步进电动机:中国,ZL201310224449.1[P],2013-6.
[10]董效男,李坚.用于混合式步进电机的转子:中国,ZL201220234731.9[P],2012-12.
[11]Liao Yuefeng,Liang Feng,Lipo T A.A novel permanent magnet motor with doubly salient structure[J].IEEE Transactions on Industry Applications,1995,31(5):1069-1078.
[12]Deodhar R P,Andersson S,Boldea I,et al.The flux reversal machine:a new brushless doubly-salient permanent-magnet machine[J].IEEE Transactions on Industry Application,2007,33(4):925-934.
[13]张淦,花为,程明,等.磁通切换型永磁电机非线性磁网络分析[J].电工技术学报,2015,30(2):34-43.
Zhang Gan,Hua Wei,Cheng Ming,et al.Analysis of nonlinear magnetic network models for flux-swiching permanent magnet machines[J].Transactions of China Electrotechnical Society,2015,30(2):34-43.
[14]王道涵,王秀和.新型永磁型磁通切换型磁阻电机齿槽转矩机理分析和解析分析模型[J].电工技术学报,2015,30(10):77-83.
Wang Daohan,Wang Xiuhe.Preliminary study for mechanisms and analytical model of cogging torque in novel permanent magnet flux switching machine[J].Transactions of China Electrotechnical Society,2015,30(2):77-83.
[15]Cheng Ming,Hua Wei,Zhang Jianzhong.Overview of stator-permanent magnet brushless machines[J].IEEE Transactions on Industrial Electronics,2011,58(11):5087-5101.
[16]程明,张淦,花为.定子永磁型无刷电机系统及其关键技术综述[J].中国电机工程学报,2014,34(29):5204-5220.
Cheng Ming,Zhang Gan,Hua Wei.Overview of stator permanent magnet brushless machine systems and their key technologies[J].Proceedings of the CSEE,2014,34(29):5204-5220.
[17]杨正专,程明,赵文祥.8/6极双凸极永磁电动机驱动系统容错型拓扑结构[J].电工技术学报,2009,24(7):34-40.
Yang Zhengzhuan,Cheng Ming,Zhao Wenxiang.A new fault tolerant drive topology for 8/6-pole doubly salient permanent magnet motors[J].Transactions of China Electrotechnical Society,2009,24(7):34-40.
[18]Cheng M,Chau K T,Chan C C.Design and analysis of a new doubly salient permanent magnet motor[J].IEEE Transactions on Magnetics,2001,37(4):3012-3020.
[19]坂本征文.步进电机应用技术[M].北京:科学出版社,2010.
[20]朱孝勇,程明.定子永磁型混合励磁双凸极电机设计、分析与控制[J].中国科学:技术科学,2010,40(9):1061-1073.
Zhu Xiaoyong,Cheng Ming.Design,analysis and control of hybrid excited doubly salient stator- permanent-magnet motor[J].Scientia Sinica Technologica,2010,40(9):1061-1073.
[21]史敬灼.步进电动机伺服控制技术[M].北京:科学出版社,2006.
[22]王宗培,姚宏.步进电动机计算和设计方法的研究[M].南京:东南大学出版社,1994.
Structural Principle and Analytical Calculation of Stator-Permanent-Magnet Stepping Motor
Lu BinglinXu Yanliang
(School of Electrical EngineeringShandong UniversityJi’nan250061China)
In order to improve the operating performance of the hybrid stepping motor(HSM),and completely solve the defects resulting from its structural configuration of rotor-mounted permanent magnet,a novel stator-permanent-magnet stepping motor(SPMSM) with permanent magnets located in the stator is originated.It can be proved that the SPMSM owns exactly the same operating principle as the HSM,whereas a much more simplified construction,a higher torque and power density as well as a higher efficiency can be achieved.Theoretical analysis regarding to the operation principle and key technology employed for the SPMSM are performed,while a comparison between the SPMSM and the DSPM machine is also conducted.Simultaneously,based on the normalized design idea of stepping motors,a normalized analysis calculation method applicable to the SPMSM is also put forward,which takes full advantage of the 2-D field-distributed characteristic of the SPMSM ignoring the end effects.By using the method,the motor’s flux linkage,electromotive force(EMF),torque,and power can be calculated.In addition,a prototype of 2-phase 8-pole 50-tooth SPMSM has been manufactured,with the practical operating feasibility validated by experiments.Both finite element simulations and experimental results show that the adopted theoretical analysis approach and the established power equation can not only act well to reflect the machine’s characteristics but also apply well to certain variations of the machine’s structural topologies and dimensions,and which might lay a foundation for further research on the design and analysis of the proposed SPMSMs.
Stator-permanent-magnet stepping motor (SPMSM),operation principle,normalized analysis,finite element simulation,prototype experiment
国家高技术研究发展计划(863计划)资助项目(2015AA042307)。
2015-06-23改稿日期2015-10-15
TM383.6
鲁炳林男,1988年生,博士研究生,研究方向为永磁电机及特种电机的设计和控制。
E-mail:1282361148@qq.com
徐衍亮男,1966年生,教授,博士生导师,研究方向为永磁电机及特种电机的设计和控制、磁悬浮轴承的设计和控制,电动汽车驱动系统。
E-mail:xuyanliang@sdu.edu.cn(通信作者)