基于NSGA-Ⅱ算法的ECPT系统PID参数寻优及输出稳压控制
2016-11-16苏玉刚陈苓芷唐春森马浚豪呼爱国
苏玉刚 陈苓芷 唐春森 马浚豪 呼爱国
(1.重庆大学自动化学院 重庆 400030 2.奥克兰大学电子与计算机工程系 奥克兰 1010)
基于NSGA-Ⅱ算法的ECPT系统PID参数寻优及输出稳压控制
苏玉刚1陈苓芷1唐春森1马浚豪1呼爱国2
(1.重庆大学自动化学院重庆400030 2.奥克兰大学电子与计算机工程系奥克兰1010)
针对电场耦合型无线电能传输(ECPT)系统阶数高、非线性、对系统参数变化敏感导致其输出电压质量下降、系统不稳定等问题,提出一种最优控制器设计方法。该方法首先建立系统广义状态空间平均(GSSA)模型,并基于此模型,利用多目标多约束遗传算法(NSGA-II)对PID控制参数进行自动寻优,有效解决了高阶系统PID控制器最优参数难以设计的难题,改善了闭环系统的上升时间、稳态误差以及对变化参数的鲁棒性能,并将超调限定在一定范围内,提升系统的稳定性。仿真和实验结果验证了GSSA模型的准确性以及在此模型上利用NSGA-II算法进行控制参数寻优的有效性。
无线电能传输电场耦合参数寻优广义状态空间平均模型PID控制
0 引言
经过多年的发展,无线电能传输(Wireless Power Transfer,WPT)技术在理论和工程应用方面取得了一系列成果[1-5]。该新型电能传输方式可以使电能的传输实现从供体到受体的无直接电气连接,从而消除了传统接触式电能传输方式存在的布线杂乱、导线磨损、接触火花等问题。因此,无线电能传输技术尤为适用于安全性要求苛刻且工作环境复杂的用电场合(如潮湿、易燃、易爆等工作环境[6,7])。在无线电能传输技术研究领域,基于电磁感应耦合的无线电能传输(Inductively Coupled Power Transfer,ICPT)技术是目前较热的研究方向,在理论研究与实际应用中都取得了较大的突破且逐步推广应用。由于电场与磁场具有某些相似特性以及理论分析的对偶性,且基于电场耦合的无线电能传输方式具有一些独有的优势(比如当耦合机构之间或周围存在金属导体时,不会使导体产生涡流损耗等[8]),因此,基于电场耦合的无线电能传输(Electric-field Coupled Power Transfer,ECPT )技术逐渐被国内外相关团队与机构所重视[9]。近年来,国内外相关学者对ECPT技术的某些特性进行了研究。文献[10]对比分析了ECPT系统盘式以及圆柱式耦合机构的特性,对基于圆柱式耦合机构的ECPT系统的工作频率、最大传输功率以及功率损耗进行了分析。文献[11]利用频闪映射建模法建立了ECPT系统模型,并基于此模型推出系统ZVS频率点以及各交流量的稳态波形,分析系统参数改变对ZVS频率点的影响。文献[12]提出了一种利用电容矩阵方式实现调谐控制的方法,实现了系统谐振频率的稳定,优化了系统能效积。
在ECPT系统实际应用中,电能发射极板与电能拾取极板的相对位置经常改变。当电场耦合机构两极板的相对位置发生变化时,电容耦合系数亦将随之变化,以至于ECPT系统能量拾取侧输出电压的质量因动态波动而下降[8]。此外,在变负载或多负载的ECPT系统中,负载的变化也将很大程度上造成ECPT系统输出电压的波动[13]。为了提高ECPT系统输出电压的稳定性,可靠且实用的输出稳压控制策略是非常有必要。
目前,关于ECPT系统输出稳压控制方面的研究文献相对较少,文献[8]引入极板阵列和可变谐振电感(变压器二次侧并联两个开关管),当耦合机构的拾取侧极板位置发生偏移时,通过改变极板阵列的供电极板和可变谐振电感值来保持输出电压稳定在原有值,但它并不能控制其稳定在任意设定值,且没有考虑负载切换的情况。而在ICPT系统输出控制研究方面,有诸多文献可查[14-17],如文献[14]建立了双向ICPT系统的动态模型,并在此模型的基础上基于多目标遗传算法设计了一组最优PID控制参数,优化系统在稳压控制过程的动态性能。虽然在基本理论分析方面,ICPT技术与ECPT技术具有一定的相似性和对偶性,但由于ECPT系统具有本身工作频率高,对系统参数变化敏感等特点,使得对其进行输出控制策略研究变得困难。在对ECPT系统输出稳压控制研究时,可借鉴ICPT系统已有的研究成果,并结合ECPT系统自身的特点,研究适合其特性的输出控制方法。
本文建立了半桥式ECPT系统的广义状态空间平均(Generalized State Space Averaging,GSSA)模型,并针对ECPT系统结构复杂、阶数较高、对系统参数变化敏感等问题,基于系统GSSA模型,利用多目标多约束遗传算法NSGA-Ⅱ自动搜寻最优PID控制参数,从而实现系统的输出稳压控制,保证系统输出响应快、稳态误差小,并且当系统参数在一定范围内变化时其输出仍能有效跟踪期望值。由于该方法通过控制系统发射侧逆变电路开关管的导通与关断来实现输出电压稳定,故系统无需增加额外的能量调节电路,降低了控制电路的复杂性。
1 半桥式ECPT系统拓扑结构及原理
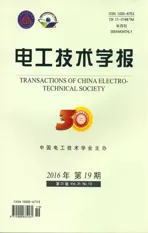
半桥式逆变电路因结构简单、可控性好、工作频率高等优点,在ECPT系统工程中得到较广泛的应用[9],故本文选用半桥式电路拓扑作为系统的逆变环节进行研究。半桥式ECPT系统拓扑结构如图1所示,该系统由发射侧和拾取侧组成。
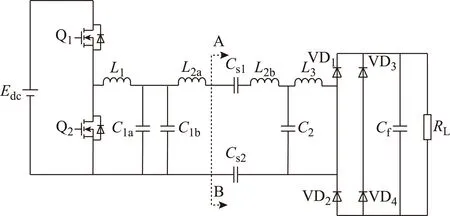
图1 基于半桥式ECPT系统电路拓扑Fig.1 The topology of the ECPT system based on half-bridge
图1中,Cs1、Cs2为ECPT系统中耦合极板的等效电容,RL为负载等效电阻。该ECPT系统的直流输入经过半桥逆变环节和发射侧谐振网络后得到高频交流电,在其作用下,耦合机构的两极板之间形成交互电场,在交互电场的作用下产生位移电流“流过”极板,实现电能的无线传输。接收极板接收到的电能经过拾取侧谐振网络与整流环节变换后提供给用电设备。若要对系统输出电压进行闭环控制,可以通过能量信号并行传输或射频传输等方式将输出电压采样信号从拾取侧传输到发射侧[18,19],采样获得的实际值与期望设定值比较后得到偏差量,将此偏差量作为控制器输入,再根据具体控制策略生成对应的控制量来控制逆变电路开关管的导通与关断,由此构成闭环控制系统,以保证输出电压的稳定性。
从拓扑结构上来看,该系统主要由半桥逆变环节、阻抗匹配环节、单级谐振网络、LCL复合谐振网络、整流滤波环节以及负载组成。其中,单级谐振网络中的电感L2a用于对耦合极板的等效电容Cs1、Cs2进行补偿;L2b、C2、L3在系统拾取侧构成LCL复合谐振网络,其作用主要有两点:一是提高A、B端右侧网络的功率因数;二是在耦合极板电流较小的条件下,提升了流经负载RL的输出电流,且由于耦合极板的电压差较小,系统的运行安全性得到提高。电容C1b用于补偿其右侧网络的阻抗使其呈现纯阻性;由于LCL网络的引入使系统拾取侧的总阻抗增加,因此在逆变电路输出端利用电感L1及电容C1a对其右侧所有电路的等效阻抗进行匹配,提升系统输出功率。
2 半桥式ECPT系统的广义状态空间平均模型
ECPT系统因阶数高、开关非线性等特性使得其对参数变化较为敏感,而且因为结构复杂,也使其理论分析变得困难。因此,有必要建立一个精确的数学模型对其内在动力学行为进行描述与分析,并在模型的基础上设计一定的控制律来保证系统输出的稳定性。本文采用广义状态空间平均法对半桥式ECPT系统进行建模,它利用傅里叶变换思想将时域非线性系统转换为频域线性模型,由此分析其暂态和稳态过程[17]。
将图1所示的系统电路拓扑进行简化。将电容C1a、C1b简化为电容C1,即C1=C1a+C1b;将电感L2a、L2b简化为电感L2,即L2=L2a+L2b;将耦合极板等效电容Cs1、Cs2简化为Cs,即Cs=Cs1Cs2/(Cs1+Cs2)。并分别定义RL1、RL2、RL3为简化系统中电感L1、L2、L3的内阻值。选取简化系统中电感电流和电容电压作为状态变量。分别采用零次谐波分量和基波分量近似表示ECPT系统中的直流状态变量uCf和交流状态变量iL1、uC1、uCs,iL2、uC2、iL3。因此,定义
(1)
利用傅里叶变换将ECPT系统时域模型转换为频域的线性微分模型为
(2)
式中,g(t)、p(t)为非线性转换函数,分别表示发射侧半桥式逆变环节和拾取侧整流环节,函数的定义为
(3)
(4)
式中,T为逆变器工作周期;θ1、θ2为函数的初相角;n为周期的整数倍。展开式(2)中各变量的傅里叶系数实虚部,依次定义为系统的广义状态变量
x(t)=[Re〈iL1〉1,Im〈iL1〉1,Re〈uC1〉1,Im〈uC1〉1,
Re〈uCs〉1,Im〈uCs〉1,Re〈iL2〉1,Im〈iL2〉1,
Re〈uC2〉1,Im〈uC2〉1,Re〈iL3〉1,Im〈iL3〉1,
〈uCf〉0]T
(5)
设系统的直流输入Edc为系统控制量,基于式(2)的频域线性微分方程描述,可建立以系统傅里叶系数实虚部为变量的广义状态空间平均模型

(6)
式中,A为系统矩阵;B为输入矩阵。通过将时域状态变量进行频域分解,将ECPT系统的时域非线性微分模型转换为频域线性微分模型,实现非线性系统的线性化。
3 基于NSGA-Ⅱ算法的PID控制器设计
在实际工程应用中,ECPT系统输出电压的波动将会在一定程度上影响到整个系统的稳定性,因此,有必要采取可靠的输出稳压控制策略,对系统输出进行实时控制。为了使系统输出电压稳定,本文采用PID控制器对系统进行输出控制,闭环框图如图2所示。将GSSA模型的输出值与设定值相比,经过PID控制模块后得到控制量,将此控制量作为GSSA模型的输入,由此保证系统输出电压稳定。
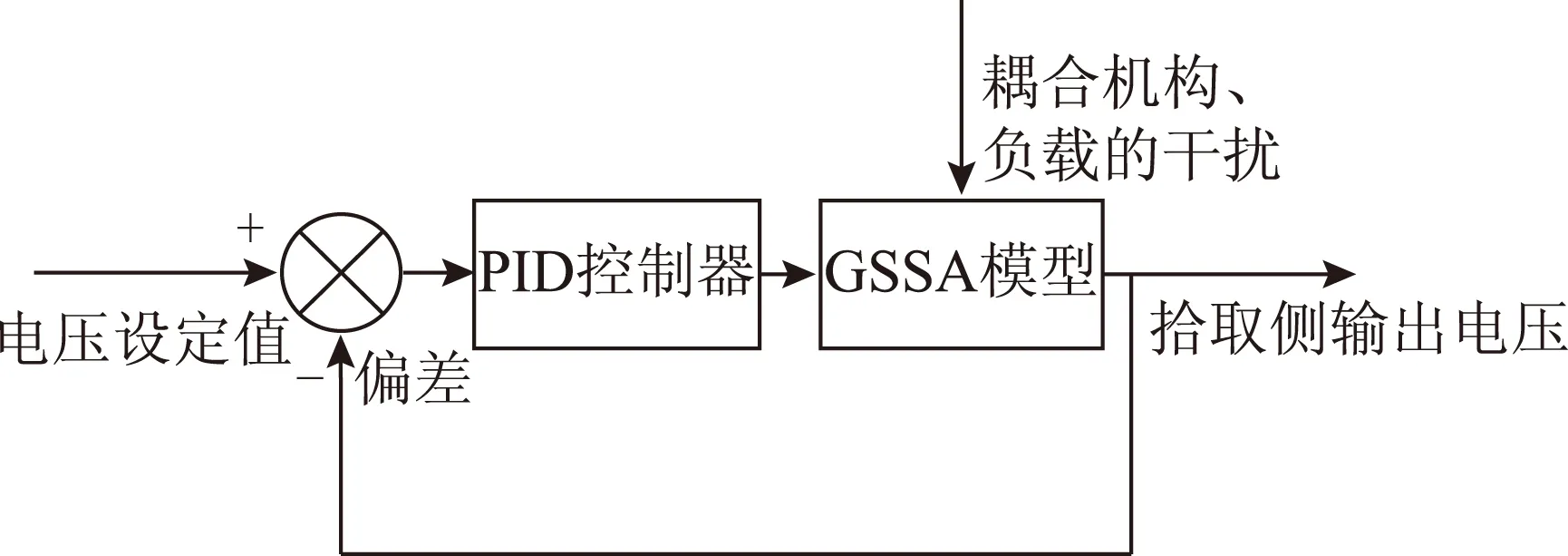
图2 系统输出控制闭环结构Fig.2 Closed-loop block structure for output voltage regulation
PID控制器的传递函数一般为
(7)
式中,Kp为比例系数;Ti为积分时间常数;Td为微分时间常数。
在PID控制器中,Kp、Ti、Td三个参数的选择直接影响PID控制器的性能,因此PID控制器设计的关键问题是如何选择这三个参数。到目前为止,有许多PID参数设计方法,其中较常见的是ZN方法[20],然而这些参数设计方法通常只适用于低阶对象,对于ECPT系统这样高阶复杂的系统,想要设计出一组能满足多个控制目标的PID参数,显然这些方法是不太适用的。针对PID参数整定问题的多目标性,本文选择多目标多约束遗传算法NSGA-Ⅱ对控制器参数进行全局优化,自动搜寻出一系列非支配最优解,并从中找出一组合适的控制参数,使系统在该组控制参数的作用下,当系统可变参数发生变化时其输出仍能达到预期控制目标(响应快、误差小、超调小、对变化参数鲁棒性好)。
3.1NSGA-Ⅱ算法原理
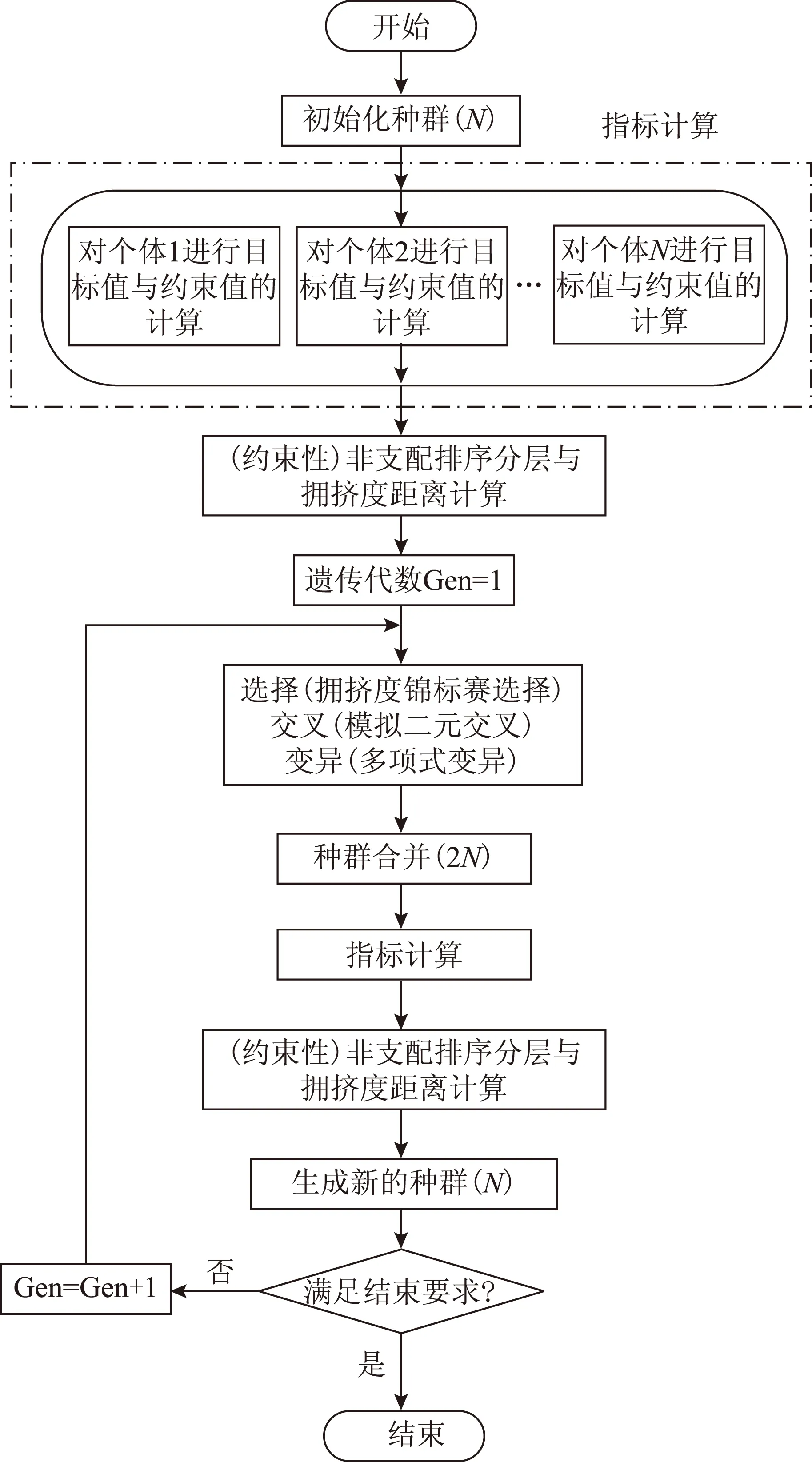
图3 NSGA-Ⅱ算法流程Fig.3 Flowchart of the NSGA-Ⅱ algorithm
NSGA-Ⅱ算法是由K.Deb提出的一种在多目标遗传算法界非常有效,并基于(约束性)非支配排序、精英保留策略与多样性维持机制的优化算法[21]。该算法所特有的精英保留策略和多样性维持机制可以确保其算法的收敛性与多样性。具体过程如图3所示:①首先根据经验估计出PID三个控制参数的取值范围,然后在这个范围内随机生成大小为N的初始种群;②根据目标函数和约束函数分别计算出每个个体所对应的目标函数值与约束函数值(即指标计算);③根据个体的指标值对种群个体进行(约束性)非支配排序分层,并分别计算每个个体的拥挤度距离;④通过选择(拥挤度锦标赛选择)、交叉(模拟二元交叉)、变异(多项式变异)操作后得到子代种群;⑤将子代种群与父辈种群合并形成大小为2N的临时种群;⑥对临时种群的每个个体进行指标计算;⑦对临时种群的每个个体进行(约束性)非支配排序分层,并分别计算其拥挤度距离;⑧根据每个个体与第一非支配前沿的接近程度及其拥挤度距离大小,从临时种群中选择前N个个体组成新的种群,作为下一代遗传操作的父辈,这个过程一直重复到算法满足结束要求为止。
3.2优化目标和约束条件
3.2.1优化目标
所谓PID参数优化,实际就是利用算法来优化Kp、Ti、Td三个参数,其本质是基于一定的目标函数和约束条件的参数寻优问题。因此,在遗传算法中关键的一步就是确定目标函数与约束条件,它决定了一个染色体(一组PID参数)的好坏。本文选取以下三个目标函数作为算法的性能评价指标。
1)上升时间trise定义为系统输出从稳态值的10%到稳态值的90%所需的时间,即
J1=t90%-t10%
(8)
2)时间乘平方误差积分ess。
(9)

J3=J3,1+J3,2+J3,3+J3,4
(10)
式中
(11)
式中,J3,1、J3,2、J3,3和J3,4分别表示当可变参数(RL,Cs)在以下4种切换情况(从标称值到极端最坏值)下变化时,系统输出从切换时刻起始的时间乘平方误差积分,其中,t表示切换时刻。

3.2.2约束条件
由于NSGA-II算法是以搜寻整个非支配前沿为目的来进行优化的,而非支配前沿的某些边界极端解(某个目标函数值非常大,但另一个目标函数值非常小)实用意义通常不大。因此,相较于第一非支配前沿的某些边界极端解,设计者更期望第二(第三,等)非支配前沿的中间解能够保留下来。以两个目标函数的最小值优化问题为例,对非支配最优解的选择情况分析图如图4所示。
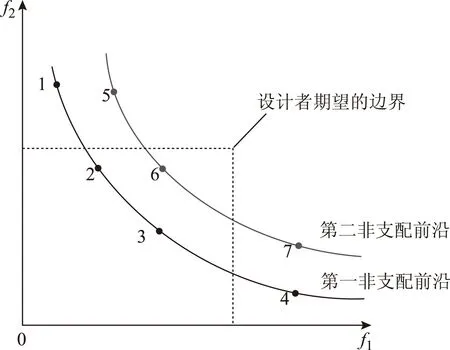
图4 非支配最优解分析Fig.4 Analysis of non-dominated solutions
从图4可以看出,优化解1、2、3、4属于第一非支配前沿,优化解5、6、7属于第二非支配前沿,设计者期望的目标函数值边界如虚线框所示。显然,优化解1、4、5、7都不是设计者所期望的解,所以,当第一非支配前沿的边界极端解(如解1)与第二非支配前沿的中间解(如解6)相比较时,设计者更期望将后者(解6)作为较优解保留下来。因此,算法需要对非支配最优解的目标函数值作约束处理,若不对其进行约束的话,那些实用意义不大的边界极端解将会一直被视作最优解,并代代遗传下去,造成最优解质量下降和计算资源的浪费。为了提高NSGA-II算法的计算效率与非支配最优解的实用性,本文引入约束条件对其进行优化处理,旨在将每一代的非支配最优解都限制到其所有目标函数值均接近各自平均值的那些非支配优化解。
因此,本文选取以下4个经验条件作为算法的约束评价指标
Cons1: trise≤0.006
(12)
Cons2: ess≤0.000 3
(13)
Cons3: err≤0.1
(14)
(15)
式中,Cons1、Cons2、Cons3分别对三个目标函数值进行边界条件约束;Cons4对系统输出在响应过程中的超调量进行约束。
在基于NSGA-Ⅱ算法的ECPT系统的PID控制参数寻优问题中,对上述目标函数值与约束函数值的计算即图3中的指标计算部分,它是根据ECPT系统的GSSA模型来进行计算的。具体的指标计算流程如图5所示。
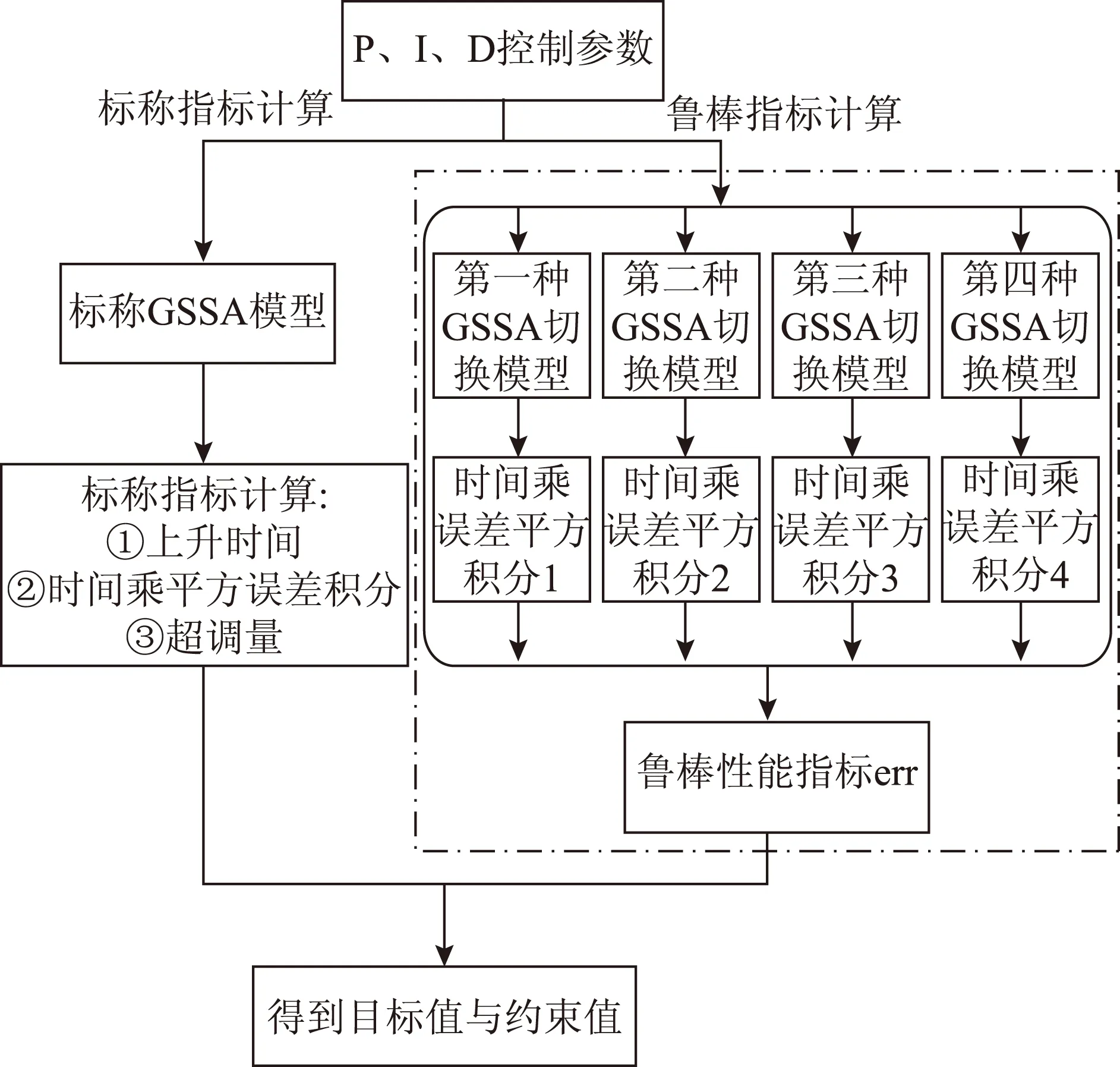
图5 指标计算流程Fig.5 Flowchart of indexes evaluation of objectives and constraints
3.3优化结果
应用带约束的NSGA-Ⅱ算法对基于GSSA模型的PID控制参数优化模型进行参数寻优,具体遗传算法的参数设置为:种群大小100,遗传代数30,交叉概率0.9,变异概率0.1。图6为当遗传代数为30时100个种群个体的目标值分布情况。
由图6可看出,当种群进化到30代时,其非支配最优解均匀分布在最优解集中,种群中每个个体的三个目标值均达到较小值,控制性能效果较好。在100个种群个体中选择等级为1,拥挤度距离较大的一个非支配最优解作为最终选定的最优解Sopt
Kp=0.887,Ti=0.002、Td=0
即选用(0.887,0.002,0)作为此次PID控制参数优化的最终解。
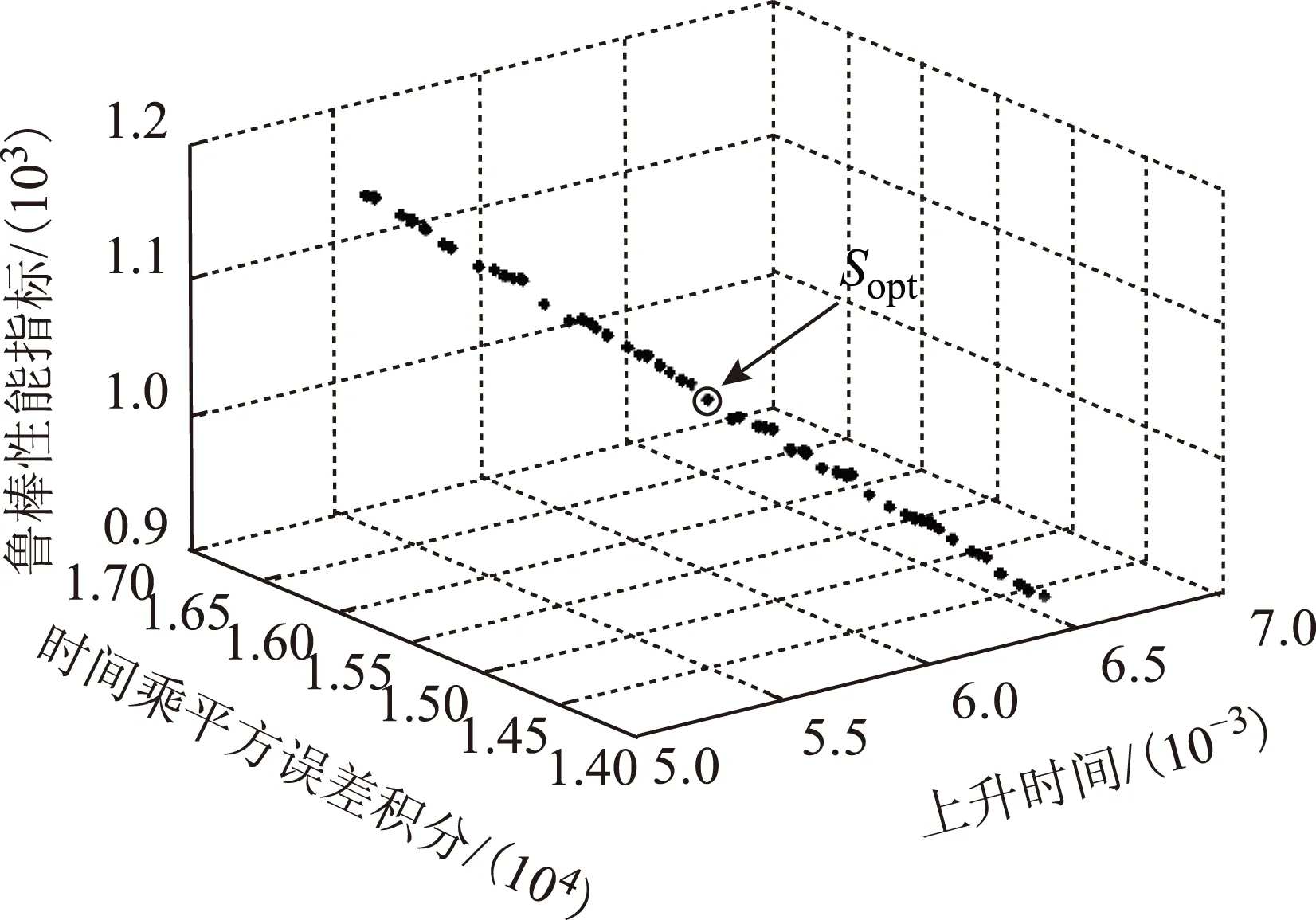
图6 NSGA-Ⅱ算法优化结果Fig.6 Optimization result of NSGA-Ⅱalgorithm
4 仿真结果与实验分析
为了验证基于NSGA-Ⅱ算法优化的PID控制器对ECPT系统输出控制效果,本文基于上述所提出的PID控制器参数寻优方法及目标函数和约束条件设计出一组最优PID控制参数(0.887,0.002,0),将其带入闭环控制系统进行仿真分析和实验验证。在图1所示的系统电路拓扑基础上,加入PID控制回路,根据系统期望输出电压值与采样得到的实际值比较后获得偏差及偏差变化率,经过PID控制器模块运算后得到相应的控制量,占空比计算模块将其转换为逆变电路开关管的控制信号,从而构成闭环控制系统,保证输出电压稳压控制。
令输出电压设定值为10 V,在Matlab/Simulink平台下对闭环系统进行仿真分析,系统电路参数取值见表1。
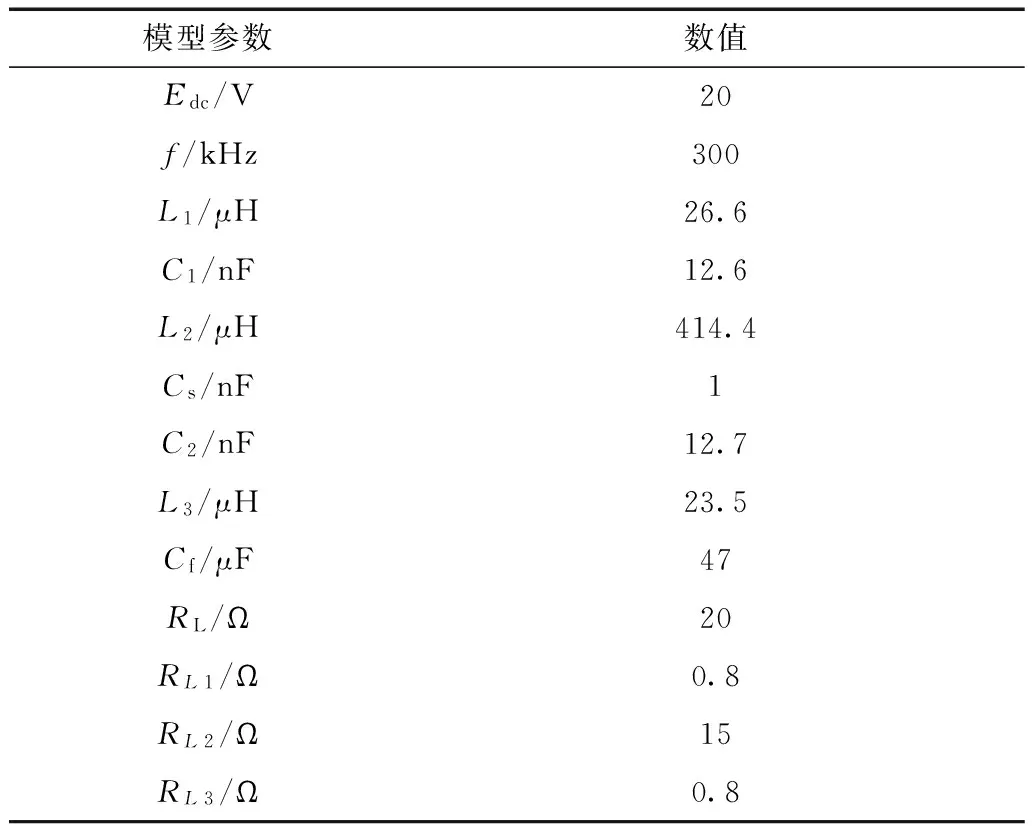
表1 系统参数取值Tab.1 System parameters
在仿真运行中利用开关器件同时切换可变参数RL、Cs,使负载RL变化±20%,Cs变化±10%,分别模拟4种参数变化的最坏情况。负载两端电压u0的仿真波形如图7所示。
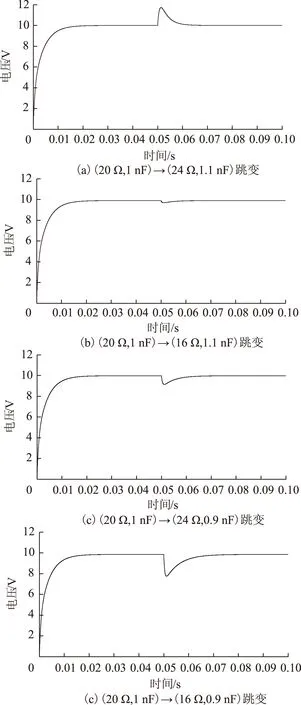
图7 ECPT系统输出电压仿真结果Fig.7 Simulation results of the ECPT system
由图7可以看出,当系统耦合机构等效电容以及负载电阻在允许变化范围内发生4种最坏情况变化时,闭环系统输出经过最快8 ms、最长20 ms左右的调节过程后均能稳定下来。而在系统起动过程,输出电压经过8 ms左右从稳态值的10%上升到稳态值的90%,与图6中的优化目标值一致。
基于同样的控制条件,现利用传统ZN参数整定方法对控制参数进行整定。由于ZN算法是一种处于经验和计算之间的中间方法,它只是以系统输出瞬态响应特性为优化目标,建立一套经验公式以获得一组瞬态响应较优的控制参数,而难以在多目标优化条件下整定出一组控制参数使闭环系统实现多个目标值最优的效果。为了比较两者的瞬态响应特性,将ZN算法整定出的控制参数(3.3,1.52×10-3,3.96×10-3)带入闭环系统中,得到响应结果见表2。从表中数据可以看出,闭环系统在ZN参数整定方法得到的控制器的作用下上升时间优于NSGA-Ⅱ算法,但其稳定时间(输出从0上升到稳态值)明显劣于NSGA-Ⅱ算法。当系统可变参数RL、Cs发生变化时,利用ZN算法的闭环系统能够稳定下来,但调节时间最短为12 ms、最长为22 ms,且每种跳变情况的调节时间均劣于或等于NSGA-Ⅱ算法。由此可见,经过NSGA-Ⅱ算法优化后的PID控制器的控制效果在动态性能以及鲁棒性能方面优于传统的ZN算法,且NSGA-Ⅱ算法是基于多个优化目标来对参数进行整定的,它具有很强的延伸性,可以通过调整不同的优化目标实现不同的控制效果,这是传统参数优化算法不能比拟的。

表2 PID控制器输出控制效果比较Tab.2 Comparison of different PID controllers
基于图1的拓扑结构和表1的系统参数,搭建了半桥式ECPT系统实验平台。本文选用STM32F407单片机作为系统的控制器实现PID控制器运算与占空比计算。单片机输出逆变电路开关管的控制信号,驱动电路将其转换为实际的驱动脉冲。系统起动过程的负载输出电压u0、Q1管栅极触发脉冲uGS、逆变器输出电压u1实验波形如图8所示。从图中可看出,Q1管栅极触发脉冲uGS作为闭环系统的直接控制信号,当系统开始运行时便根据PID控制器输出的控制量转换为占空比可变的触发脉冲信号。系统在半桥逆变环节的作用下,逆变器输出电压u1为占空比可变的方波输出,其占空比与触发脉冲uGS的占空比一致。与仿真结果类似,PID控制器经过约12 ms的动态调节,使系统输出电压u0从1 V上升到9 V,且进入稳态后,其稳态误差基本为零。在整个动态过程中系统超调很小,调节时间与仿真基本一致。由此说明,在实际应用中,该PID控制器使系统有较好的动态特性和静态特性。
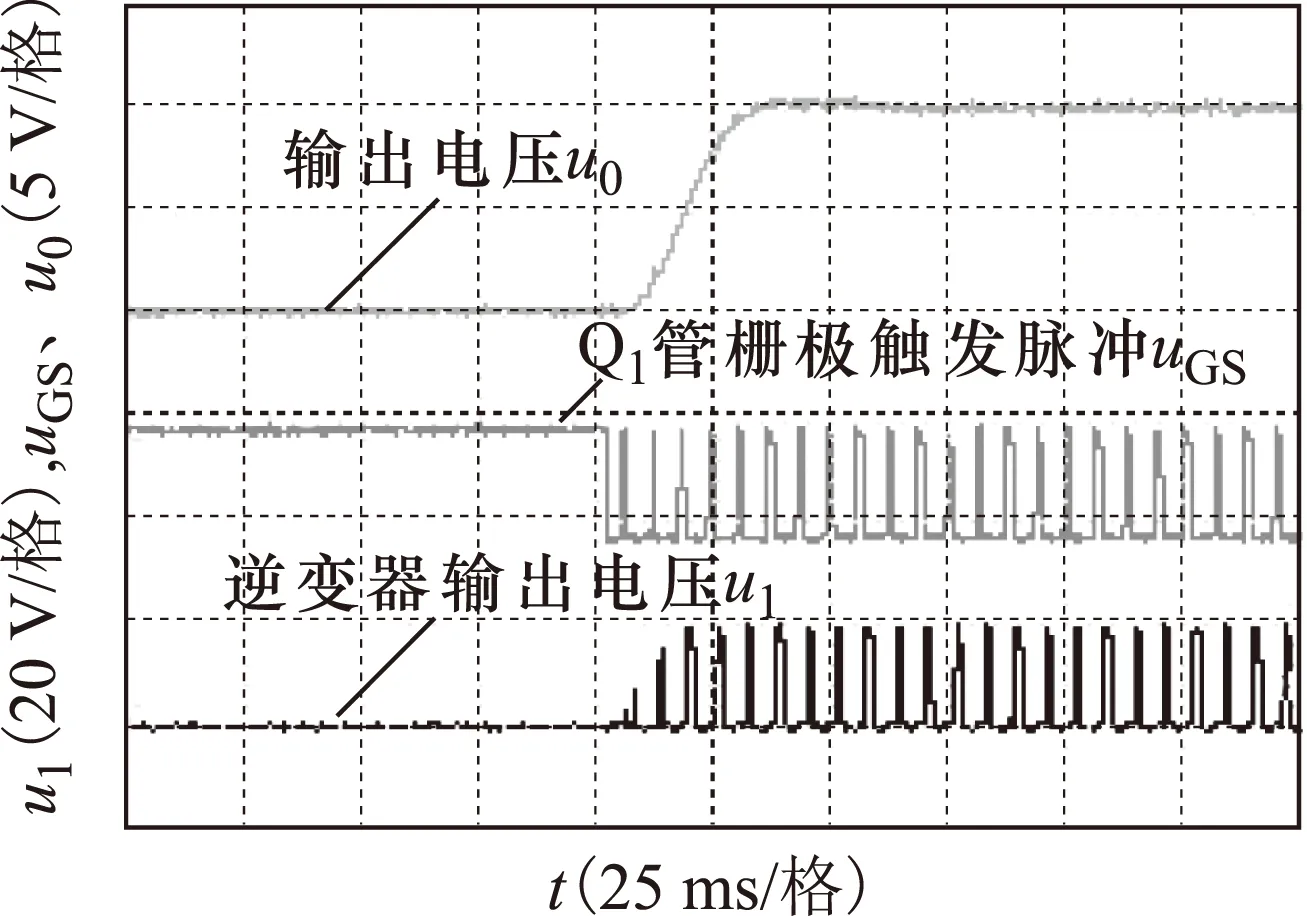
图8 ECPT系统在起动过程的实验波形Fig.8 Experimental waveform of the ECPT system with step response
当系统可变参数(Cs,RL)发生变化时,系统输出电压u0与流经L3的电流iL3的实验波形如图9所示。实验结果与图7中的仿真结果基本一致,当系统参数发生4种最坏情况跳变时,输出电压u0均能经过一个较短的调节过程后进入10 V稳态阶段,调节时间最快为12 ms、最长为30 ms左右。当负载阻值发生变化时,流经L3的电流iL3会发生相应变化来保证系统输出电压值恒定。当负载阻值增大时,iL3的幅值会相应减小,反之,当负载阻值减小时,iL3的幅值会相应增大以保证u0值不变。
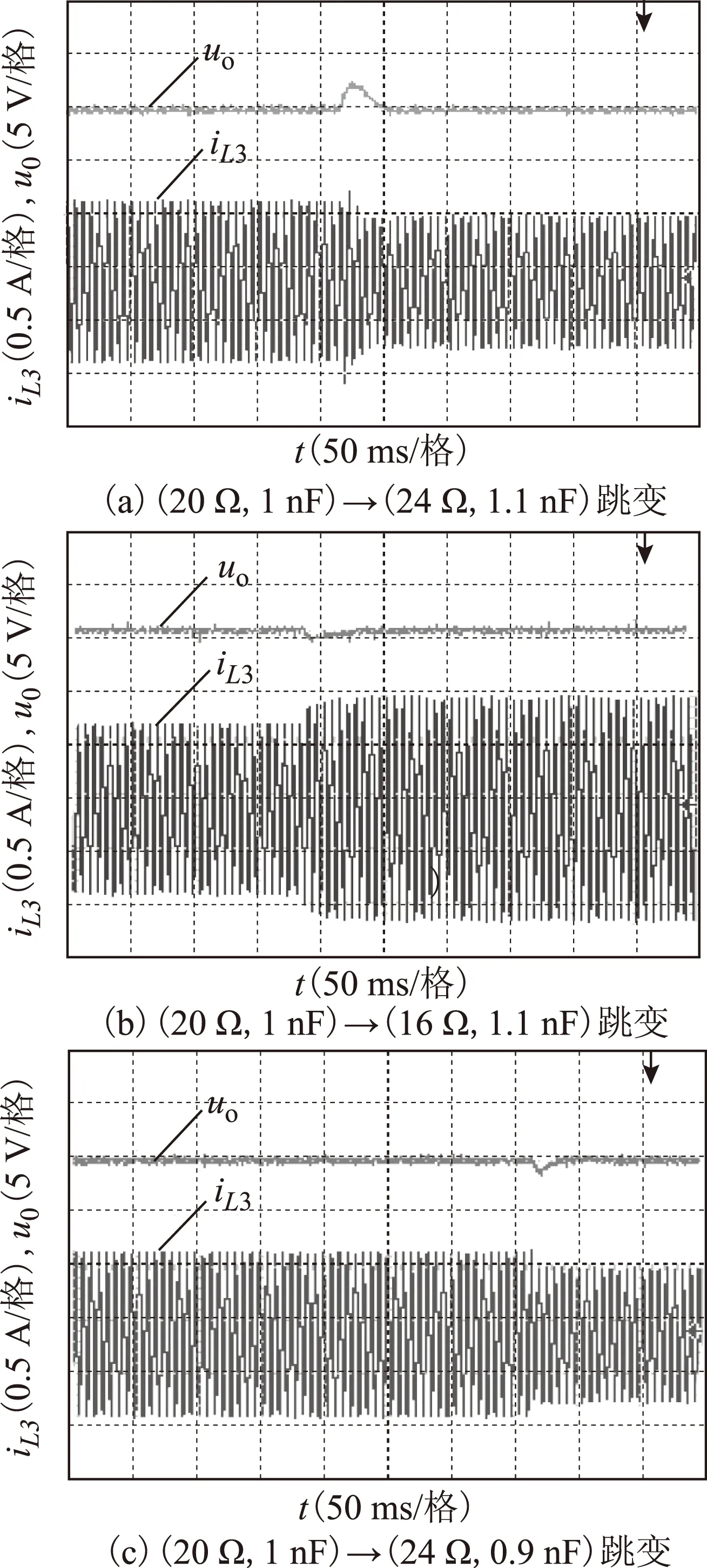
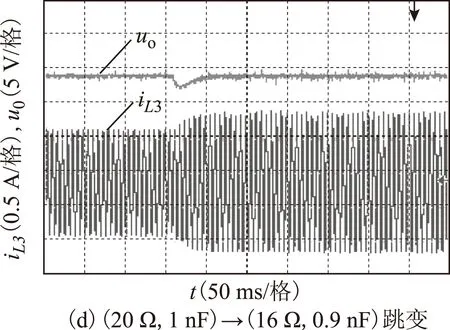
图9 ECPT系统在参数跳变下的实验波形Fig.9 Transient response of the ECPT system when parameter variations
5 结论
本文采用PID控制器对半桥式ECPT系统进行输出稳压控制,建立了系统的广义状态空间平均模型,并基于此模型提出了一种利用多目标多约束遗传算法对控制参数进行自动寻优的方法。该优化方法在多目标多约束条件下自动搜寻出一组最优PID控制参数,保证闭环系统在该控制器作用下,当系统可变参数(Cs,RL)在一定范围内发生变化时,输出仍能保持上升时间短、稳态误差小、鲁棒性能好的效果,从而提高系统的鲁棒性与传输性能。本文利用Matlab/Simulink平台建立了闭环系统的仿真模型,给出了仿真结果,并进行了分析;基于理论分析和仿真结果搭建了系统实验平台,给出实验结果。通过仿真结果和实验验证了上述研究内容的有效性。
[1]苏玉刚,陈龙,王智慧,等.基于最小二乘法的感应电能无线传输系统负载辨识方法[J].电工技术学报,2015,30(5):9-14.
Su Yugang,Chen Long,Wang Zhihui,et al.A load identification method for inductive power transfer system based on least squares algorithm[J].Transactions of China Electrotechnical Society,2015,30(5):9-14.
[2]张献,杨庆新,崔玉龙,等.大功率无线电能传输系统能量发射线圈设计、优化与验证[J].电工技术学报,2013,28(10):12-18.
Zhang Xian,Yang Qingxin,Cui Yulong,et al.Design optimization and verification on the power transmitting coilin the high-power wireless power transmission system[J].Transactions of China Electrotechnical Society,2013,28(10):12-18.
[3]Wang Z H,Li Y P,Sun Y,et al.Load detection model of voltage-fed inductive power transfer system[J].IEEE Transactions on Power Electronics,2013,28(11):5233- 5243.
[4]王智慧,吕潇,孙跃,等.谐振式无线电能传输系统损耗模型[J].电工技术学报,2014,29(9):17-21.
Wang Zhihui,Lü Xiao,Sun Yue,et al.Modeling of power loss in resonant wireless power transfer system [J].Transactions of China Electrotechnical Society,2014,29(9):17-21.
[5]程志远,朱春波,魏国,等.串-并补偿结构大功率感应充电系统谐振变换器[J].电工技术学报,2014,29(9):44-48.
Cheng Zhiyuan,Zhu Chunbo,Wei Guo,et al.Resonant converter for high power ICPT system withseries-parallel compensation[J].Transactions of China Electrotechnical Society,2014,29(9):44-48.
[6]杨庆新,章鹏程,祝丽花,等.无线电能传输技术的关键基础与技术瓶颈问题[J].电工技术学报,2015,30(5):1-8.
Yang Qingxin,Zhang Pengcheng,Zhu Lihua,et al.Key fundamental problems and technical bottlenecks of the wireless power transmission technology[J].Transactions of China Electrotechnical Society,2015,30(5):1-8.
[7]侯佳,陈乾宏,严开沁,等.新型S/SP补偿的非接触谐振变换器分析与控制[J].中国电机工程学报,2013,33(33):1-9.
Hou Jia,Chen Qianhong,Yan Kaiqin,et al.Analysis and control of S/SP compensation contactless resonant converters[J].Proceedings of the CESS,2013,33(33):1-9.
[8]Liu C,Hu A P,Wang B,et al.Capacitively coupled contactless matrix charging platform with soft switched transformer control[J].Industrial Electronics,2013,60(1):249-260.
[9]Theodoridis M P.Effective capacitive power transfer[J].IEEE Transactions on Power Electronics,2012,27(12):4906-4913.
[10]Liu C,Hu A P,Nair N K C.Coupling study of a rotary capacitive power transfer system[C]//IEEE International Conference on Industrial Technology,Melbourne,Australia,2009:1-6.
[11]Liu C,Hu A P.Steady state analysis of a capacitively coupled contactless power transfer system[C]//IEEE Energy Conversion Congress and Exposition,San Jose,CA,2009:3233-3238.
[12]苏玉刚,徐健,谢诗云,等.电场耦合型无线电能传输系统调谐技术[J].电工技术学报,2013,28(11):189-194.
Su Yugang,Xu Jian,Xie Shiyun,et al.A tuning technology of electrical-field coupledwireless power transfer system[J].Transactions of China Electrotechnical Society,2013,28(11):189-194.
[13]Liu C,Hu A P.Power flow control of a capacitively coupled contactless power transfer system[C]//2009 35th Annual Conference of IEEE Industrial Electronics,Porto,Portugal,2009:743-747.
[14]Neath M,Swain A K,Madawala U K,et al.An optimal PID controller for a bidirectional inductive power transfer system using multiobjective genetic algorithm[J].IEEE Transactions on Power Electronics,2014,29(3):1523-1531.
[15]张炯,楼佩煌,钱晓明,等.基于双LCL补偿的无接触供电系统研究[J].电工技术学报,2013,28(10):19-24.
Zhang Jiong,Lou Peihuang,Qian Xiaoming,et al.Study of contactless power transfer system based on double LCL Compensation[J].Transactions of China Electrotechnical Society,2013,28(10):19-24.
[16]蔡华,史黎明,李耀华,等.感应耦合电能传输系统输出功率调节方法[J].电工技术学报,2014,29(1):215-220.
Cai Hua,Shi Liming,Li Yaohua,et al.Output power adjustment in inductively coupled power transfer system[J].Transactions of China Electrotechnical Society,2014,29(1):215-220.
[17]Li Y L,Sun Y,Dai X.μ-Synthesis for frequency uncertainty of the ICPT system[J].IEEE Transactions on Industrial Electronics,2013,60(1):291-300.
[18]刘洋.ICPT系统中信号双向传输机理研究[D].重庆:重庆大学,2013.
[19]孙小凌.可分区供电电源负载识别与系统建模仿真[D].重庆:重庆大学,2009.
[20]Gude J J,Kahoraho E.Modified ziegler-nichols method for fractional PI controllers[C]//IEEE Conference on Emerging Technologies & Factory Automation,Bilbao,2010:1-5.
[21]Dai Xin,Zou Yang,Sun Yue.Uncertainty modeling and robust control for LCL resonant inductive power transfer system[J].Journal of Power Electronics,2013,5(13):814-828.
Evolutionary Multi-Objective Optimization of PID Parameters for Output Voltage Regulation in ECPT System Based on NSGA-Ⅱ
Su Yugang1Chen Lingzhi1Tang Chunsen1Ma Junhao1Hu Aiguo2
(1.Automation College of Chongqing UniversityChongqing400030China 2.Department of Engineering the University of AucklandAuckland1010New Zealand)
Several issues including output voltage distortion and system instability might be caused by the high-order resonant networks,nonlinearity,and parameter-sensitivity in electrical-field coupled power transfer(ECPT) systems.An optimal controller design method is proposed in order to overcome these problems.A generalized state space averaging(GSSA) model is built to approximate the ECPT system firstly.Basing on this model,an evolutionary optimization framework is utilized to search for the optimal controllers automatically with the evolutionary multi-objective algorithm NSGA-II.As the results,the difficulty of designing a proportion-integration-differentiation(PID) controller of a high-order systems is solved effectively.And the system performance,indicated by rise time,steady state error,and robustness of the system,are optimized.Meanwhile,the system overshoot is limited within an acceptable range and the stability of the system is improved.At last,the simulation and experiments verify the accuracy of the GSSA model and the validity of the utilized NSGA-II optimization method.
Wireless power transfer,electrical-field coupled,parameter optimization,generalized state space averaging (GSSA) model,PID control
国家自然科学基金资助项目(51477020)。
2015-06-10改稿日期2015-08-06
TM724
苏玉刚男,1962年生,博士,教授,研究方向为无线电能传输技术、电力电子技术、控制理论应用与自动化系统集成。
E-mail:420888970@qq.com(通信作者)
陈苓芷女,1991年生,硕士研究生,研究方向为电力电子技术和无线电能传输技术。
E-mail:368729089@qq.com