标准离散时间切换奇异摄动系统的H∞控制
2016-11-15陈旋陈金香
陈旋,陈金香
(内蒙古工业大学电力学院,内蒙古 呼和浩特 010080)
标准离散时间切换奇异摄动系统的H∞控制
陈旋,陈金香
(内蒙古工业大学电力学院,内蒙古 呼和浩特 010080)
在实际工程应用中,由于环境变化,元器件老化等原因必然会导致系统模型参数的不确定性,很难得到系统的精确模型。针对一类参数不确定性的线性标准离散时间双时标系统,将奇异摄动理论和切换理论相结合,建立标准离散时间切换双时标系统(DSTTSs)动态模型,切换理论的引入主要解决系统中参数不确定性部分对系统模型精确度的影响。主要讨论了标准离散时间双时标切换系统的稳定性分析以及H∞状态反馈控制器的设计问题。利用Lyapunov函数建立满足H∞性能充分条件的线性矩阵不等式(LMIs)。将上述一系列问题都将归结为求解与摄动参数ε无关的线性矩阵不等式,采用实例仿真证明该方法的有效性。并将Lyapunov函数法和谱范数法的仿真结果进行比较,由于谱范数法中存在较多假设从而增加了保守型,相比较之下Lyapunov函数法控制性能较好。
离散时间双时标系统;参数不确定性;Lyapunov函数;H∞控制;线性矩阵不等式(LMIs)
0 引言
系统变量呈现慢、快两种时标特性的双时标系统广泛存在于实际控制系统,因其快时标特性影响,此类系统的建模与控制均比常规系统复杂。20世纪60年代Klimushev提出的奇异摄动理论成为解决双时标问题的有效工具。目前,对奇异摄动系统的研究成果很多,文献[1-3]论述了奇异摄动
系统的稳定性,文献[4-6]对奇异摄动系统的控制器设计也做了深入研究,但在实际工程控制问题中系统中往往还存在很多不确定性,为了进行有效的控制系统设计,以往的研究大多将不确定部分忽略了,用一个相对简单的模型来描述复杂系统,从而造成系统模型的不确定性,不能得到更好的控制精度。近年来,对复杂系统参数不确定性的研究也不断涌出,但成果较少。文献[7-9]论述了切换奇异摄动系统的稳定性,该复杂系统由若干子系统组成,并未对不确定性部分进行详细描述,增加了系统的保守性.文献[10]论述了非线性系统中含有不确定性参数的切换控制器的设计,文献[11] 论述了含有参数不确定性的非线性系统的切换模糊动态输出反馈H∞控制器设计。此外,以往研究大多针对于连续时间简单系统,而对离散双时标系统的参数不确定性研究很少,至今还没有整体对双时标系统中的参数不确定性进行建模和控制器设计做深入研究。本文最大的创新在于首次提出了对含有系统参数不确定性的离散时间双时标切换系统控制问题的解决方法,在本文中,我们假设系统不确定性参数是时变的且有界,采用切换理论处理系统参数不确定性部分。
本文的创新点可分为三方面,一是首次将切换理论将奇异摄动理论相结合解决了双时标系统中参数不确定性对系统模型精确度影响的问题;其次在于模型建立基于离散时间模型,以往对离散时间的研究甚少;最后就是控制方法的选取,由于系统存在不确定性和小的摄动参数,本文采用鲁棒性较强的H∞状态反馈控制,最终将问题转化为求解与摄动参数ε无关的矩阵不等式的问题。借用文献[11]中对不确定部分的处理方法建立标准离散时间切换线性奇异摄动系统模型,利用Lyapunov函数法求解控制器增益,并结合实例验证该方法的有效性,后期研究还可将该方法拓展到非线性奇异摄动系统。
1 系统描述
根据被控系统采样速率的不同,离散时间奇异摄动系统可分为标准离散奇异摄动系统和非标准离散模糊奇异摄动模型,由于系统中存在参数不确定项,将系统模型分为线性部分和参数不确定部分,采用非时延标准离散奇异摄动系统模型如下

2 H∞控制器设计
假设系统状态完全可测,状态反馈控制器设计为如下

将控制器代入系统模型中得闭环控制系统模型

其中,

引理1:给定一个标量ε*(0<ε*<1)如果存在矩阵T1,T2,T3满足

那么对于∀∈(0,ε*],下式成立,即


其中,
构造Lyapunov函数


切换规则:


应用schur补定理可得

其中,

因为Pε>0,可推导出下式成立,即

将上式进一步改写为

结合式(11)与式(12),下式是式(13)成立的充分条件,即


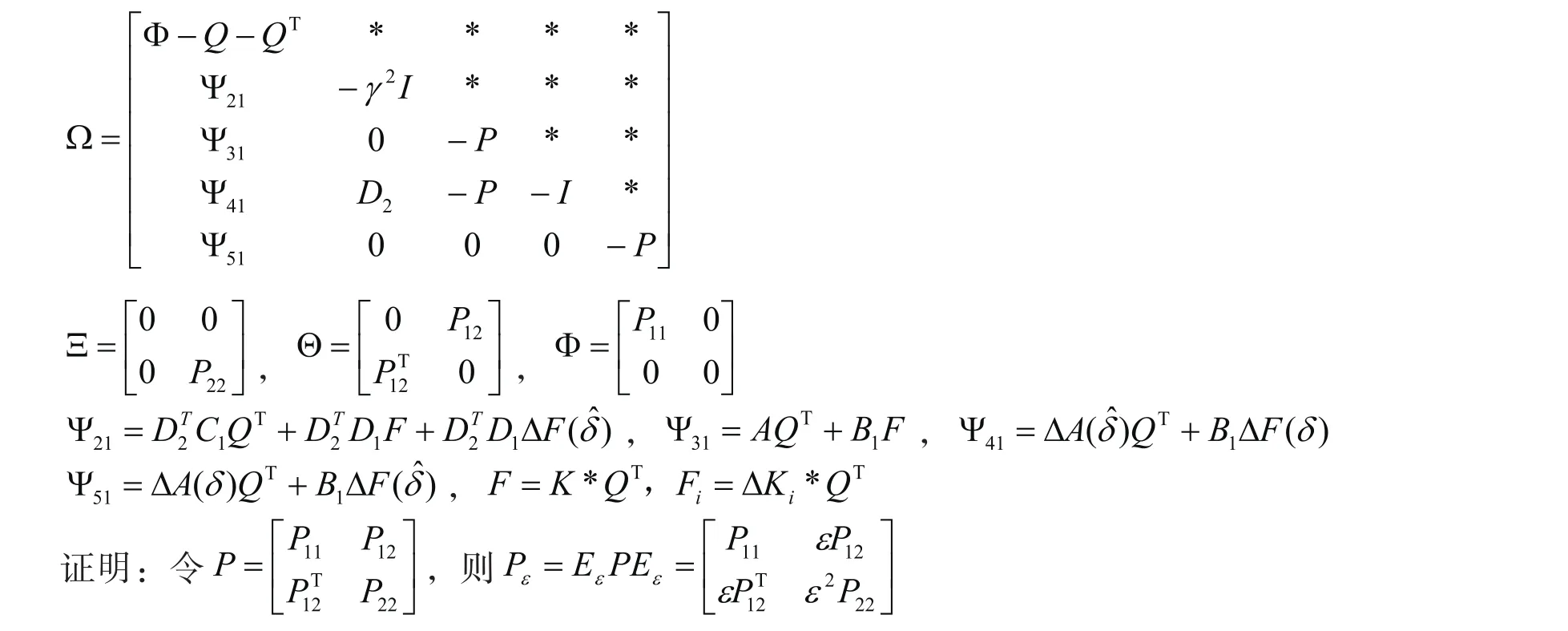
对于ε∈(,ε*],
令F=K*QΤ,F=ΔK*QΤ

其中,

以上证明了式(4)成立是闭环系统渐进稳定的充分条件。
把(6)式从k=0一直加到k=N,可得

对所有的N成立。
因为

对所有的N成立,系统(3)的H∞范数小于γ。
3 实例仿真
考虑一个四阶系统,标准离散时间切换奇异摄动系统模型



选取采样周期为t=0.2s初始状状

求得控制器增益:


图1 γ=0.9,ε=0.001时闭环系统状态响应(Lyapunov)Fig.1 When γ=0.9,ε=0.001,the state response of the closed-loop system(Lyapunov)

图2 γ=0.9,ε=0.001时闭环系统控制器输出响应(Lyapunov)Fig.2 When γ=0.9,ε=0.001,the output response of the closed-loop system(Lyapunov)

图3 ε=0.001时闭环系统状态响应(谱范数法)Fig.3 When ε=0.001,the state response of the closedloop system(spectral norm method)
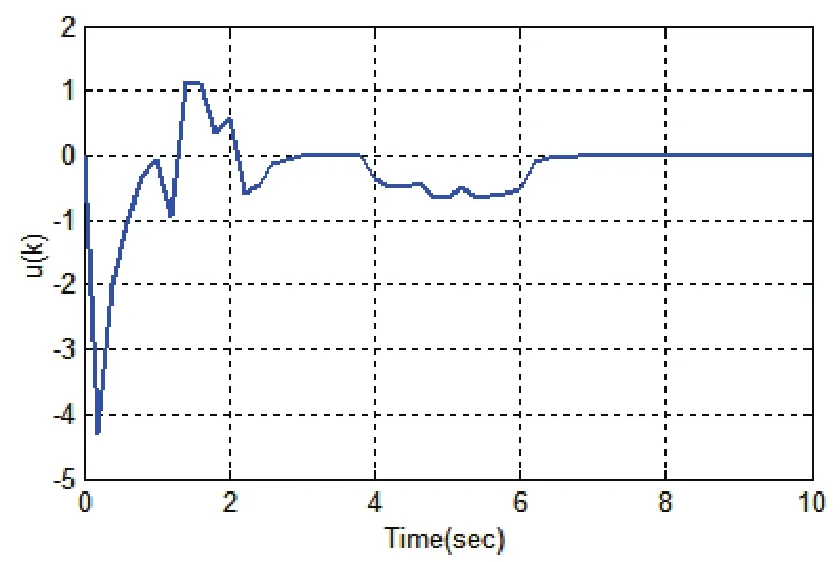
图4 ε=0.001时闭环系统输出响应(谱范数法)Fig.4 When ε=0.001,the output response of the closedloop system(spectral norm method)
采用本文提出的Lyapinov函数法,仿真结果如图1,2所示,图1为闭环系统状态响应曲线,图2为闭环系统输出响应曲线。为了突出Lyapunov函数法的优越性,将其与谱范数法得到的控制效果相比较,采用谱范数法得到仿真结果如图3图4 所示。
该仿真结果进一步验证了切换状态反馈H∞控制器在处理奇异摄动参数不确定性系统时,该方法的有效性。通过比较图1和图3,我们可知,由于通过谱范数法在求得控制器增益的过程中,假设条件过多从而增加了结果的保守型,其次是因为鲁棒性较差,从而在实际工程应用中控制效果不如Lyapunov函数法。无论采用哪种方法均可证明本文提出的理论在解决离散时间切换双时标系统中有效性。
4 结 论
针对双时标系统的不确定性,本文融合切换和奇异摄动理论,对切换离散时间奇异摄动系统建模,切换理论的引入主要解决系统参数不确定性问题,参数不确定性部分是时变且有界的。利用谱范数、Lyapunov 函数和线性矩阵不等式方法,研究了切换线性奇异摄动系统的H∞状态反馈控制器设计,将对控制器增益的求解转化为求解一组与摄动参数ε无关的线性矩阵不等式的问题,避免了由ε引起数值求解的病态问题。仿真结果表明该方法的有效性。
[1] Kyun-Sang Park, Hyun-Wook Jo, and Jong-Tae Lim. Stability analysis of standard and non-standard nonlinear singularly perturbed system with uncertainty[C]. 12th International Conference on Control, Automation and Systems. ICC, Jeju Island, Korea, 2012: 1833-1877.
[2] Hongwang Yu, Baoshang Zhang. Stabilizability of a class of linear singularly perturbed systems via output feedback[C]. 26th Chinese Control and Decision Conference. 2014: 4230-4233.
[3] I. Malloci, J. Daafouz and C. Iung. Stabilization of continous-time singularly perturbed switched system[C]. In proceeding of the 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference, Dhanghai, P.R. China, 2009: 6371-6376.
[4] Tan, W., T. Leung and Q. Tu, "H control for singularly perturbated systems", Automatica, 1998, 34(2): 255-260.
[5] J. Chen, F. Sun, Y. Yin, C. Hu. State feedback robust stabilization for discrete-time fuzzy singularly perturbed systems with parameter uncertainty[J]. IET Control Theory Appl., 2011, 5(10): 1195-1202.
[6] Yang Kun, Shen Yanxia, Ji Zhicheng . memory state feedback control for uncertain nonlinear switched singular systems with time-varying delay[C]. Proceedings of the 32nd Chinese Control Conference, Xian, China. July, 2013: 2073-2077.
[7] M. Balde, U. Boscain, and P. Mason, A note on stability conditions for planar switched systems[J]. Int. J. Control, 2009, 82(10): 1882-1888.
[8] I. Malloci, J. Daafouz and C. Iung.Stability and stabilization of two time scale switched systems in discrete time[J]. IEEE Transaction on Automatic Control, 2010, 55(6): 1434-1438.
[9] Fouad El Hachemi, Mario Sigalotti and Jamal Daafouz. Stability analysis of singularly perturbed switched linear sytems[J]. IEEE Transaction on Automatic Control, 2012, 57(8): 2116-2121.
[10] Ohtake. H, Tanaka. K, Wang. H.O, Switching fuzzy controller design based on switching Lyapunov function for a class of nonlinear systems[J]. Systems, Man, and Cybernetics, Part B: Cybernetics, IEEE Transactions on. 2006,36(1): 13-23.
[11] G-H. Yang,and J-X. Dong. Switching Fuzzy Dynamic Output Feedback Control for Nonlinear Systems[J]. IEEE Trans. Syst., Man, Cybern. B,Cybern., 2010, 40(2): 505-516.
[12] 俞立. 鲁棒控制-线性矩阵不等式处理方法[M].北京清华大学出版社,2002.
L Yu. Robust control-Linear Matrix Equalities Approaches[M]. Beijing Tsinghua University press,2002.
[13] 冷永刚,田祥友. 一阶线性系统随机共振在滑动轴承故障诊断中的应用研究[J]. 新型工业化,2013,3(9):92-98.
Y G Leng, X Y Tian . One order linear stochastic resonance system in fault diagnosis of bearings on the application research [J]. The Journal of New Industrialization, 2013, 3 (9):92-98.
[14] 邓夏, 贾庆轩, 褚明,黄飞杰.基于动态切换函数的单杆柔性臂动态滑模——最优混合控制[J]. 新型工 业化,2012,,2(10):59-66.
X Deng, Q X Jia, M Zhu, F J Huang. Dynamic sliding mode of single link flexible manipulator based on dynamic switching function: optimal hybrid control [J]. The Journal of New Industrialization 2012, 2 (10):59-66.
H∞Control for Switched Standard Discrete-time Singularly Perturbed Systems
CHEN Xuan, CHEN Jin-xiang
(College of Electric Power, Inner Mongolia University of Technology , Huhehaote , Inner Mongolia 010080, China)
In practical engineering application, due to environmental changes, components aging and other reasons will inevitably lead to the uncertainty of the system model parameters, it is difficult to get a precise model of the system. For a class of standard discrete-time singularly two-time scale system with uncertain part, a dynamic model of switched linear singularly perturbed systems is builted. Switching mechanism is introduced to handle the unknown parameters. Stability analysis and H∞state-feedback control problems for switched linear singularly perturbed systems (SLSPSs) are investigated. With the Lyapunov function and linear matrix inequalities (LMIs) approaches , a series problems are solved by a set of ε-independent linear matrix inequalities. A numerical example is presented to illustrate the effectiveness of the proposed approach. By comparing the simulation results of Lyapunov function method and the spectral norm method, because of some assumptions in the spectral norm method increased the conservative type. A numerical example proved that the Lyapunov function method has better control performance.
Linear singularly perturbed system; Parameter uncertainties; Switching control; State feedback; Linear matrix inequalitiees (LMIs)
10.19335/j.cnki.2095-6649.2016.09.006
CHEN Xuan, CHEN Jin-xiang. H∞Control for Switched Standard Discrete-time Singularly Perturbed Systems[J]. The Journal of New Industrialization, 2016, 6(9): 35-41.
陈旋,陈金香.标准离散时间切换奇异摄动系统的H∞控制[J]. 新型工业化,2016,6(9):35-41.
国家自然科学基金项目(51374082)
陈旋(1990-),女,硕士,主要研究方向:复杂系统的建模和控制;陈金香(1972-)女,高级工程师,博士,主要研究方向:工业轧钢
