基于CFD和混合配平算法的直升机旋翼地面效应模拟
2016-11-14朱明勇招启军王博
朱明勇, 招启军, 王博
南京航空航天大学 直升机旋翼动力学国家级重点实验室, 南京 210016
基于CFD和混合配平算法的直升机旋翼地面效应模拟
朱明勇, 招启军*, 王博
南京航空航天大学 直升机旋翼动力学国家级重点实验室, 南京210016
建立了一套基于非结构网格技术和动量源模型的直升机旋翼计算流体力学(CFD)方法,用来模拟贴地飞行时直升机旋翼非定常气动特性。其中,控制方程采用三维Navier-Stokes方程,空间方向上采用Jameson格式,时间方向上采用五步Runge-Kutta迭代法,选用Spalart-Allmaras湍流模型。旋翼对流场的作用采用动量源项模拟,为更真实地模拟地面效应(IGE)的作用,采用了“移动地面”的物面边界来代替常规的“固定地面”边界,并对旋翼附近及旋翼与地面之间的网格进行加密处理,以提高地面涡的捕捉精度。考虑实际飞行环境下旋翼的运动和操纵,在流场计算时考虑旋翼配平特性。其中,配平方程的旋翼气动力通过CFD方法和动量-叶素组合理论模型的耦合计算给出,为了提高配平方法的鲁棒性和效率,提出并建立了基于遗传算法/拟牛顿法的高效混合迭代算法。运用所建立的方法,首先,选用有试验结果可供对比的算例计算了地面效应作用下的旋翼拉力增益、功率变化,验证了计算方法的有效性,解决了涡流理论方法较难模拟的“小速度前飞旋翼需用功率突增”问题。然后,着重研究了UH-60A直升机旋翼在不同离地高度、不同前进比状态,旋翼需用功率、诱导速度、地面涡及旋翼操纵的变化规律。计算结果表明:地面涡出现在较小的前进比范围内,随前进比的增大,地面涡在纵向平面将顺来流方向移动,在轴向方位靠近地面方向移动,直至最后不断减弱消失。
旋翼; 地面效应; 非定常气动特性; 地面涡; 配平分析; Navier-Stokes方程
近年来,无论在军用还是在民用上,都要求直升机作持续的贴地飞行。由于直升机小速度贴地飞行时,旋翼尾流由于地面的阻塞效应向上卷起与地面相互干扰,直升机处于特殊的气动环境中,其流场环境与无地面效应(OGE)状态相比复杂很多,旋翼需用功率、平衡以及操纵特性、飞行品质等方面都出现较大的变化。因此,贴地飞行状态下的直升机非定常干扰流场及旋翼气动性能研究一直是直升机技术的研究重点和难点之一。
针对直升机贴地飞行问题已经开展了大量的研究方法,主要包括试验方法、理论方法和数值模拟3种手段。在试验方面,早期的试验研究主要包括旋翼拉力和旋翼需用功率等的测量[1-3]。Curtiss[2]、Light[3]和Ganesh[4-5]等通过试验测定了地面效应(IGE)状态下地面涡的定性形成过程,初步分析了旋翼流场特征。Nathan和Green[6]使用传送带模拟移动地面,得出了移动地面能更真实地反映地面效应现象的影响。试验方法比较准确可靠,但试验时间长且成本较高,并受试验状态的限制。在理论研究方面,地面效应研究也有很大的发展。Cheeseman和Bennett[7]较早提出了存在地面效应时旋翼拉力的经验公式,并与试验结果进行了对比,获得了一些初步结果。张西[8]提出了一种基于飞行试验的直升机悬停状态地面效应研究方法,可以方便地进行直升机有无地面效应时的悬停性能计算,但未进行前飞贴地飞行时直升机旋翼的性能计算。尽管理论研究方法计算简单易实现,但大多依赖试验数据,因此理论方法本质上是一种数学归纳,据此计算新状态或新机型的地面效应特性准确性有待商榷。此外,在小速度飞行时,旋翼需用功率突增的现象一直是当前直升机飞行性能计算的难点问题之一,传统的涡流理论方法受制于旋翼尾迹溢出方式的设定假设[9],未能反映桨盘前倾尾迹上绕的过程(小速度前飞时旋翼桨盘前倒带来的结果),直接导致了计算精度的下降。进一步,在贴地飞行环境下,旋翼的需用功率会如何发生变化也值得深入开展研究。
随着计算机技术及数值方法的发展,近年来国内外学者开始将计算流体力学(CFD)方法引入该研究领域。康宁和孙茂[10-11]提出了一个简化的旋翼贴地流场计算方法,使用动量源项法模拟旋翼桨盘作用,对旋翼贴地飞行时的速度场、地面涡进行了数值计算,获得了比涡流理论方法更精确的黏性流动特征,但没有考虑旋翼配平的影响。叶靓等[12]建立了一个基于非结构嵌套网格的流场求解器来模拟旋翼地面效应环境下的流场,较精确地获得了地面涡的变化特性,但采用了固定地面的边界条件,且未系统分析贴地飞行下的旋翼功率、诱导速度和旋翼操纵特性的变化特性,也未计入配平影响。Kutz等[13]通过求解Navier-Stokes方程,计算了直升机旋翼在悬停和前飞状态的地面效应,该方法计算精度高,但计算时间长、效率低,也未计入配平的影响,只对有限参数进行了分析。
直升机贴地飞行时多为低速飞行,且受地面效应的影响,在低速范围内,旋翼诱导速度的大小和方向变化比较大,带来旋翼吹风挥舞的显著变化,导致旋翼操纵量也随之变化,因此有必要在贴地飞行流场计算时考虑旋翼配平特性。鉴于此,为兼顾贴地飞行时旋翼非定常流场的模拟精度和效率,本文使用动量源项模拟旋翼对流场的作用,采用有限体积法求解三维Navier-Stokes方程和Spalart-Allmaras湍流模型来模拟贴地飞行环境下的干扰流场。考虑实际飞行环境下旋翼的运动和操纵,在流场计算时计入配平。其中,配平方程的气动力通过CFD方法和动量-叶素组合理论模型的耦合计算给出,为了提高配平方法的鲁棒性和效率,提出并建立了基于遗传算法/拟牛顿法的混合迭代算法。改进前人采用“固定地面”来模拟地面对流场作用的方法,计算了“移动地面”边界条件时的旋翼贴地干扰流场。验证了地面效应时旋翼拉力增益现象,并模拟了小速度飞行时旋翼需用功率突增的现象。在此基础上,进行了系统的参数影响分析,计算并分析了不同离地高度和不同前进比时旋翼的需用功率、诱导速度和配平操纵量的变化规律,获得了一些有意义的结论。
1 计算方法
1.1网格生成
计算区域为地面上包含旋翼的长方体,其大小选为10R×15R×6R(对应x、y和z方向,R为旋翼半径)。采用非结构四面体网格对流场空间进行填充,在桨盘区域和桨盘下方与地面区域之间加密网格。以离地高度为0.5R的UH-60A直升机旋翼网格为例,其网格点数为411 600个,网格面数为4 440 162个,网格单元数为2 172 161个,如图 1所示。

图1 贴地飞行环境下旋翼流场计算网格示意图Fig.1 Computational grids of rotor flowfield at in ground effect flight
1.2控制方程及求解
控制方程采用含动量源项的三维Navier-Stokes方程:
(1)
守恒变量、无黏通量和黏性通量的表达式分别为
式中:n为控制体面S的单位外法向矢量;Ω为控制体体积;t为时间;ρ、p、E和H分别为流体的密度、压强、单位质量的总内能和单位质量的总焓;τ(·)、Θ(·)均为黏性相关项;V=[uvw]T为速度;M为动量源项。
在进行直升机旋翼/地面气动干扰流场求解时,空间离散方法采用Jameson中心差分格式,时间离散采用五步Runge-Kutta迭代方法,并加入人工黏性项。考虑计算精度和效率以及黏性项的影响,本文采用Spalart-Allmaras湍流模型[14]。采用当地时间步长、隐式残值光顺等方法加速流场的收敛。
1.3动量源方法
采用动量源方法模拟旋翼对流场的作用,该方法最大的特点是不考虑桨叶附近的流动细节特征,将旋翼的周期性转动通过时间平均的办法转化为“准定常”流动,用动量源项表示旋翼对流场的作用[15-16],具体步骤如下:
步骤1将桨叶沿展向离散成许多微段,可以认为在此微段上翼型弦长等基本参数均为常数。

步骤3将得到的动量源项转换到计算坐标系后添加到相应的网格单元中。
坐标系的定义与文献[17]一致,则体轴系到桨轴系的坐标变换矩阵为

式中:A为桨盘左倾角;B为桨盘前倾角。
1.4边界条件
用CFD方法模拟直升机旋翼/地面气动干扰流场时,需要给定边界条件。地面采用物面边界条件,移动地面和固定地面的边界处理略有不同。固定地面采用无滑移边界条件,移动地面物面单元的速度V=V∞(V∞为来流速度)。远场边界条件采用一维Riemann不变量进行设置。
2 旋翼配平分析模型
为了提高对干扰流场模拟的准确性,需进一步考虑旋翼的实际运动,因此在流场模拟时对旋翼进行配平分析。旋翼配平具体思路:固定旋翼的前飞速度和轴倾角,调整旋翼的总距角(θ0)、横向周期变距(A1)和纵向周期变距(B1),使得直升机旋翼满足给定的力和力矩的配平条件,即旋翼拉力系数(CT)等于目标拉力系数(CTdesired),俯仰力矩(M)和滚转力矩(L)为零。这里的旋翼配平方法主要适用于风洞环境下的试验配平。旋翼配平方程为
(2)
旋翼气动力采用旋翼气动力模型[17]和CFD模型分别求解,将求得的气动力耦合后代入旋翼配平方程中,采用遗传算法/拟牛顿法混合迭代算法求解配平方程。
2.1遗传算法/拟牛顿法混合迭代算法
2.1.1遗传算法
为改善遗传算法的计算复杂性,便于在较大的空间进行遗传搜索,采用浮点数编码。个体x表征旋翼总距、横向周期变距和纵向周期变距,在相应的操纵范围内取值。本文直接以旋翼配平方程组每个方程的绝对值之和作为适应度函数f(x),通过比较个体的目标适应度来判别其优劣性以简化计算。遗传算法的基本运算包括:
1) 选择运算即复制运算,是从旧的种群中选择适应度高的染色体,放入匹配集中,为以后染色体交换、变异,产生新的染色体做准备。选择运算主要采用轮盘赌选择方法,同时采用最优保存策略,即将最优个体直接复制到子代中。
2) 交叉(交换)操作是指对两个相互配对的染色体依据交叉概率按某种方式相互交换其部分基因,从而形成两个新的个体。它在遗传算法中起关键作用,是产生新个体的主要方法。两个个体x1和x2之间交叉运算产生的两个新个体为
(3)
式中:λ=f(x1)/(f(x1)+f(x2))。
3) 变异是指对个体编码串随机指定的某一位或某几位基因作突变运算。突变产生染色体的多样性,可以避免进化中早期成熟和陷入局部极值点。突变的概率很低。变异算子选取为对原来的浮点数增加或减少一个随机数(步长),并采用动态步长,即迭代前期大后期小。进行变异操作后,保证变异个体的取值在旋翼操纵范围内。
2.1.2拟牛顿法和混合迭代算法
拟牛顿法是一种对初始值要求严格的局部收敛算法。在远离精确解的时候,它是发散的;而在精确解附近区域,其收敛速度很快,一般几步就能收敛到很高的量级。
拟牛顿法具有局部快速收敛特性,但依赖于初值;而遗传算法具有全局收敛与群体搜索的优点,但收敛速度慢。本文结合拟牛顿法和遗传算法的优点,发展了一种新的遗传算法/拟牛顿法混合算法,使之具有全局快速收敛特性。在遗传算法/拟牛顿法混合算法中,先用遗传算法进行初步计算,得到较好的初值,然后用拟牛顿法求解配平方程,快速得到配平操纵量。
2.2耦合CFD配平方法
考虑求解平衡方程时采用遗传算法/拟牛顿法混合算法,需要多次反复求解平衡方程,而完成一次CFD数值模拟过程便需要较大的计算代价,所以如果采用CFD模型完全替代低精度的气动模型,计算代价势必会非常庞大。为了提高计算效率,本文在文献[18]的基础上,采用CFD模型与动量-叶素理论模型耦合后的气动力进行旋翼配平计算。图2给出了耦合配平方法进行旋翼贴地飞行流场分析的具体流程图,其具体过程如下:
步骤1给定旋翼参数和飞行状态,应用动量-叶素理论模型求得旋翼气动力,先采用遗传算法进行初步的配平计算,收敛后将得到的配平值代入拟牛顿迭代法中再次对旋翼配平方程进行求解计算,方程的解即耦合配平的初始值。
步骤2将耦合配平的初始值代入CFD模型和动量-叶素理论模型中,分别求得这两个模型的旋翼气动力,并将得到的旋翼气动力进行耦合。旋翼气动力耦合方式为
(4)

步骤3将求得的耦合旋翼气动力代入旋翼配平方程中,应用遗传算法/拟牛顿法混合迭代算法求解旋翼配平方程。
步骤4比较CFD模型求得的旋翼拉力系数和给定的旋翼拉力系数的差值,如果满足收敛条件则输出配平值,然后进行第5步;如果不满足收敛条件则回到第2步。
步骤5将耦合配平收敛后的流场信息输出并进行后处理,分析不同前进比、不同离地高度时旋翼需用功率、诱导速度、地面涡以及旋翼操纵量的变化规律。

图2 贴地飞行时旋翼配平分析流程图Fig.2 Flowchart of rotor trim analyses at in ground effect flight
3 算例验证
3.1配平方法验证
采用有大量试验数据可供对比的ROBIN模型[19]来验证旋翼配平方法,模型的基本参数如下:机身长度为2m,桨盘/机身间距为0.083m,桨叶半径为0.860m,桨叶片数为4,弦长为0.066m,翼型为NACA0012,桨叶平面形状为矩形,无尖削和后掠,轴倾角为3°,桨叶线性负扭转为-8°,桨尖速度为180m/s。
分别选取前进比μ=0.01,0.05,0.15,0.23进行算例验证,在配平计算过程中,保持旋翼拉力系数与试验拉力系数相同。图3给出了本文配平计算的旋翼总距、纵向周期变距和横向周期变距,计算值与试验值基本一致。
图4给出了耦合配平时旋翼拉力系数残值(lg(ΔCT) )的收敛曲线(n为耦合迭代步数)。从图中可以看出,本文建立的基于遗传算法/拟牛顿法迭代混合算法的耦合迭代算法具有较好的稳定性和收敛性,前进比大时收敛速度更快,一般在五步之内就可以获得配平值。
图5为机身顶端线的压强系数计算值与试验值的对比(σ为旋翼实度,x为机身纵坐标,L为半机身长度)。从图中可以看出,计入旋翼配平后计算得到的压强系数Cp值与试验值比较吻合,验证了本文配平方法的有效性。

图3 ROBIN旋翼配平值Fig.3 Trim results of ROBIN rotor

图4 拉力系数残值收敛图Fig.4 Residual convergence curves of thrust coefficient

图5 机身顶端线压强系数计算值与试验值的对比Fig.5 Comparisons of calculated pressure coefficient on fuselage top line with test data
3.2旋翼拉力增益计算
旋翼拉力增益现象是直升机旋翼贴地飞行时出现的重要特征。从滑流理论角度看,由于地面的阻挡作用,功率相同时,地面效应状态和无地面效应相比,旋翼会产生一定的拉力增加。
选用有试验结果可供对比的文献[3]中的旋翼作为算例,其半径R=1.105m,桨叶片数为4,翼型为NPL9615。计算状态:旋翼悬停,旋翼离地高度h/R=0.4,0.5,0.6,0.7,0.8,0.9,1.0,1.5,2,3,4。图6为本文计算得到的拉力T与试验值、经验公式结果[3]的比较。从图中可以看出,本文CFD方法计算值比经验公式结果更接近试验值,验证了地面效应时拉力增益现象。从图中还可以看出,离地高度越大,拉力增益越小,地面效应越弱,当离地高度大于2时,拉力与无穷远的拉力T∞接近,此时地面效应几乎可以忽略不计。

图6 拉力增益随离地高度变化的对比Fig.6 Comparison of variation of rotor thrust increments with different flight heights
3.3小速度飞行功率突增现象的模拟
选用UH-60A直升机旋翼作为研究对象。该旋翼半径为8.178m,转速为27rad/s,轴倾角为3°,桨叶弦长为0.527m,桨叶片数为4,旋翼根切为0.189 3R。
图 7给出了旋翼拉力系数CT/σ=0.15时,旋翼需用功率(CQ)与试验值[20]的对比。从图中可以看出计算值与试验值吻合较好,需用功率先增大后减小,有效模拟了小速度时功率的突增现象。这是由于小速度贴地飞行时,由于地面的作用,在一定前进比范围内出现地面涡。地面涡随着前进比的增大顺来流方向移动,诱导引起额外的穿过桨盘向下的入流,增大了诱导速度,导致旋翼诱导功率增大;当地面涡移动到旋翼正前方时额外入流最大,旋翼需用功率最大。随着前进比
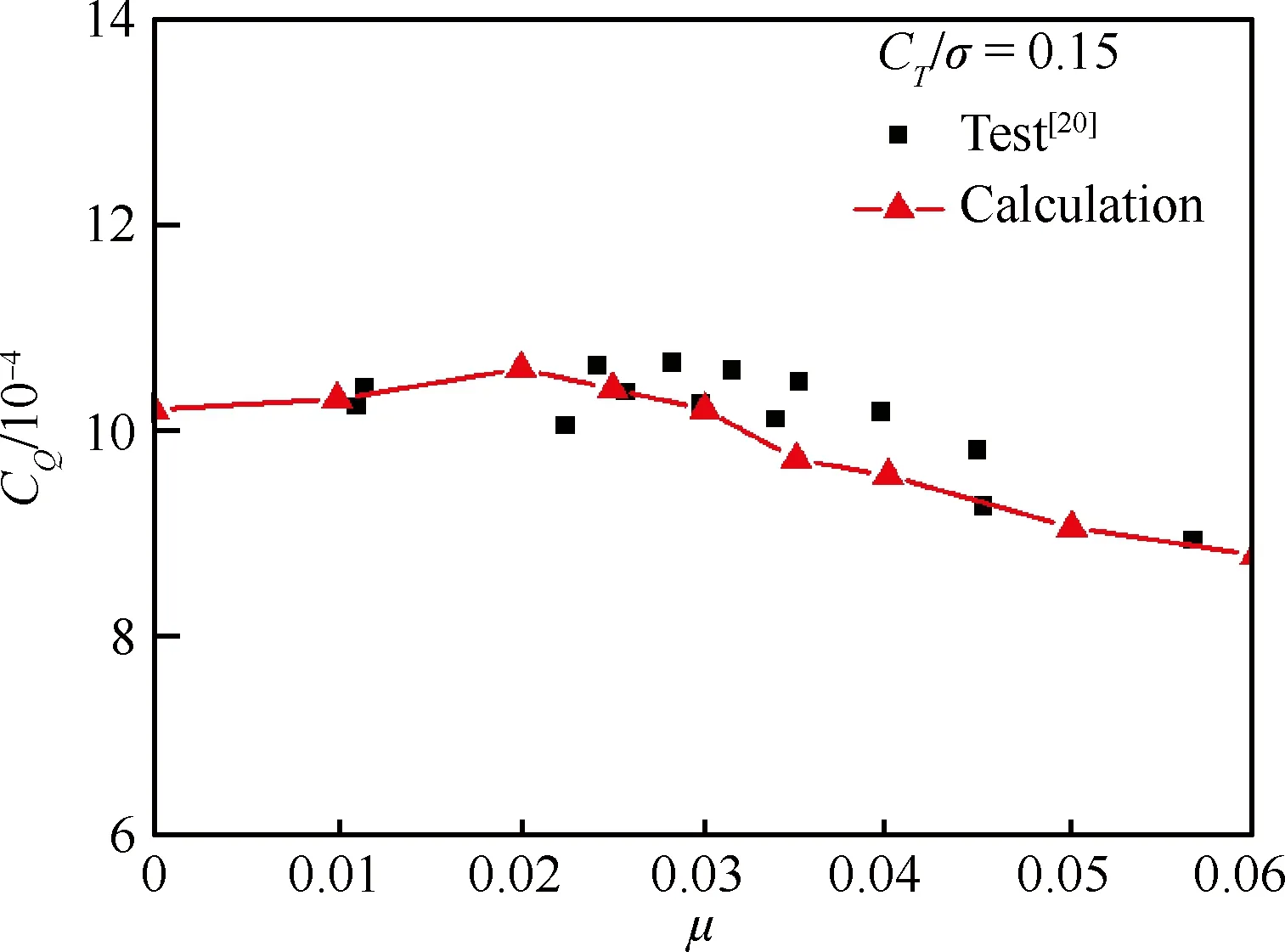
图7 小速度飞行时旋翼需用功率突增现象Fig.7 Ramp increment of rotor power required at a low speed flight
的继续增大,桨盘入流明显增加,此时的旋翼诱导速度逐步减小,导致旋翼需用功率持续下降。
4 算例与结果分析
4.1移动地面的影响
固定地面边界条件是地面的简化处理方式,为更真实地模拟地面的影响,计算了移动地面边界条件下的旋翼流场,采用UH-60A直升机旋翼作为研究对象。图8是桨叶拉力系数CT/σ=0.1,旋翼离地高度h/R=0.53时固定地面和移动地面旋翼需用功率的对比图。从图中可以看出,移动地面比固定地面的旋翼需用功率大体上略大。这表明其他条件相同时,移动地面和固定地面相比,地面效应略弱。由于地面与旋翼之间的相对运动,地面的阻挡效果减弱,这与真实的物理情况是相符的。

图8 移动地面与固定地面旋翼需用功率对比Fig.8 Comparison of rotor power required between moving ground and stationary ground
4.2旋翼需用功率的比较
为了研究贴地飞行环境下旋翼需用功率随前飞速度和拉力系数变化的特征,这里仍采用UH-60A直升机旋翼作为研究对象。图9为保持旋翼拉力不变,考虑旋翼在配平情况下,旋翼需用功率随离地高度的变化图。从图中可以看出,随着离地高度的增大,旋翼需用功率增大,地面效应减弱。当旋翼离地高度h/R=2时,需用功率和无地效时的功率很接近。所以,当离地高度h/R>2时,地面效应影响很小,可以不考虑地效作用,这与滑流理论的分析结果是一致的。
同时,桨叶载荷越大,旋翼需用功率越大;并且桨叶载荷越大,有地面效应时的旋翼需用功率与无地效时的需用功率比越小,地面效应越强。
给定桨叶拉力系数CT/σ=0.1,旋翼需用功率随着前进比的变化如图10所示。旋翼需用功率随前进比的变化比较复杂,需用功率随前飞速度增加经历先增大、后减小、再增大的过程。随着离地高度的减小,旋翼需用功率基本上减小,并且不同离地高度旋翼最大需用功率对应的前进比随离地高度的减小而增大。当地面涡刚好在旋翼前方时,向下穿过桨盘的诱导入流最大,旋翼需用功率最大。当旋翼需用功率超过最大值后,需用功率减小。该过程中地面涡向后移动,引起向上穿过桨盘的诱导流动。前进比继续增大,需用功率曲线向一起靠拢。由于前飞时旋翼尾流向后方倾斜,地面对尾流的阻挡作用减弱,因而地面效应随前进比的增大而减弱以至消失。此外,从图中还可以看出,无地效时,本文方法能有效地模拟小速度前飞时旋翼桨盘前倒带来的旋翼需用功率突增的现象。

图9 不同桨叶载荷旋翼需用功率的对比Fig.9 Comparison of variation of rotor power required with different blade loads
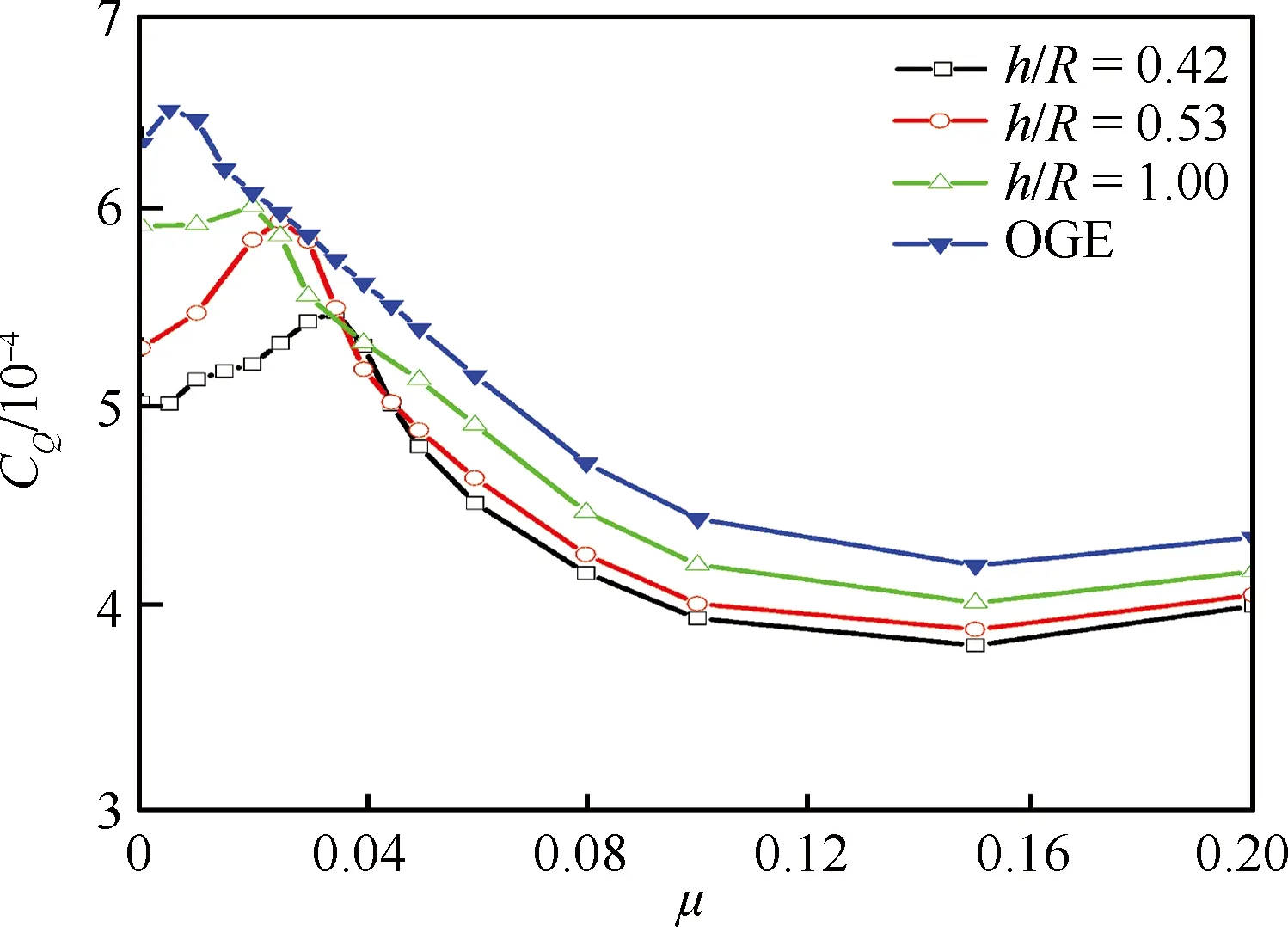
图10 不同离地高度旋翼需用功率随前进比变化的对比Fig.10 Comparison of variation of rotor power required with advance ratio in different flight heights
4.3地面涡的形成及特性
4.3.1地面涡随前进比的变化
图11给出了前进μ=0.02,0.03,0.05,旋翼离地高度h/R=0.53时,UH-60A直升机旋翼的流场图。该流场图左边为旋翼附近区域空间流线图及地面涡空间位置示意图,右边分别为纵向对称面和横向对称面的剖面流线图。旋翼尾迹碰到地面并受来流的影响,前部向后卷起,形成马蹄涡,这就是所谓的地面涡。结合纵横向对称面流场图,可以直观地显示地面涡的空间位置和形状。地面涡呈马蹄形,前部离地较近,涡较集中;后部逐渐抬高,涡量逐渐扩散。随着前进比增大,地面涡逐渐出现,并沿纵向顺来流方向移动、轴向位置向地面移动,地面涡不断扩散,直至最后不断减弱消失。由于前飞时旋翼尾流向后方倾斜,地面对尾流的阻挡作用减弱,因而地面效应随前进比的增大而迅速减弱以至消失。


图11 不同前进比时旋翼流场图Fig.11 Rotor flowfields different advance ratios
4.3.2地面涡随离地高度变化
图12为前进比μ=0.03时离地高度h/R=0.53,1.00,∞时旋翼纵向对称面的流场图。对比无地效和有地面作用的情况,可以看出在地面涡及地面的影响下,旋翼桨盘附近的流场有很大的不同,这对旋翼的气动力特性和飞行特性会有很大影响。没有地面存在的情况下,桨盘下的流动基本上是向下并向后的,犹如一被吹向后的射流。在桨盘前部和后部向下流动的速度较大,在桨盘中部向下流动的速度较小。在有地面的情况,桨盘下的流动变得较复杂。不仅有旋翼前缘下方的地面涡,碰到地面的尾迹还向上反弹,在桨盘的中后部出现向上的速度。
对比图12(a)与图12(b)可以看出,随着离地高度增大,地面涡变化趋势为沿纵向顺来流方向移动、轴向位置向地面移动,地面涡不断扩散,反映地面效应的减弱。

图12 不同离地高度纵向对称面旋翼流场图Fig.12 Rotor flowfields in longitudinal symmetry plane with different flight heights
4.4旋翼诱导速度分布比较
4.4.1诱导速度随高度的变化
选用UH-60A直升机旋翼作为算例,给定旋翼拉力系数,计算状态:悬停状态,离地高度h/R=0.53,0.79,1.00,1.50,2.00。图13为方位角ψ=180°时旋翼诱导速度沿径向的分布图。从图中可以看出,随着离地高度的增大,诱导速度Vi的值大致增大,地面效应减弱。离地高度h/R=1.50,2.00时,诱导速度分布基本一致。表明当离地高度h/R>2.00时,地面效应可以忽略不计,这与需用功率分析结果是一致的。
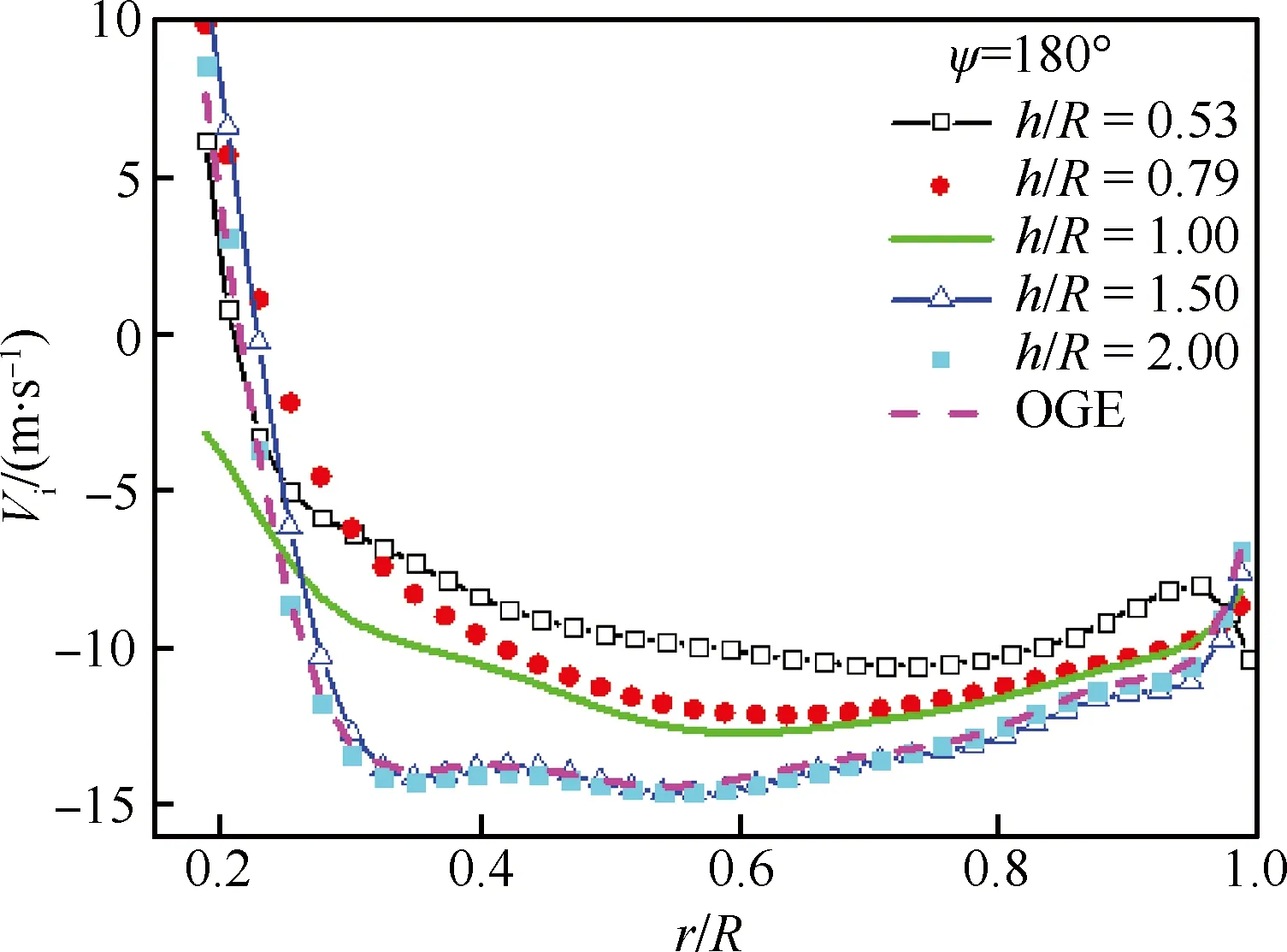
图13 悬停状态旋翼诱导速度沿桨叶径向的分布Fig.13 Rotor induced velocity distribution along radial direction of blade in hover

图14 前飞状态旋翼诱导速度沿桨叶径向的分布图Fig.14 Rotor induced velocity distribution alongradial direction of blade in forward flight
4.4.2诱导速度随前进比的变化
图14(a)和图14(b)为离地高度h/R=0.53,桨叶拉力系数CT/σ=0.1,方位角分别为180°和270°时,不同前进比状态下的UH-60A直升机旋翼桨盘下方 0.08R 处诱导速度分布图。从图14(a)可以看出,随着前进比的增大,诱导速度的峰值先增大后减小,峰值位置向桨叶根部方向移动。前进比为0.01和0.02时,桨尖下方的诱导速度为负值,即向下穿过桨盘平面;前进比增大到0.03后,桨尖下方的诱导速度为正值,即向上穿过桨盘平面。这是由于前进比增大后地面涡顺来流方向移动到桨盘下方所导致的(参见图 11(b))。从图14(b)可以看出,在小于约0.62R的范围内,诱导速度随前进比的增大而增大。靠近桨尖部分,诱导速度随着前进比的增大先增大后减小。由于地面涡出现在桨盘的前部,所以方位角ψ=270° 的诱导速度的变化没有像方位角ψ=180° 时的明显跳跃变化。
4.5旋翼操纵量的变化
图15为UH-60A直升机旋翼在不同离地高度、不同前进比情况下,桨叶拉力系数为CT/σ=0.1时旋翼配平操纵量结果的对比。旋翼各方位角的桨距角为
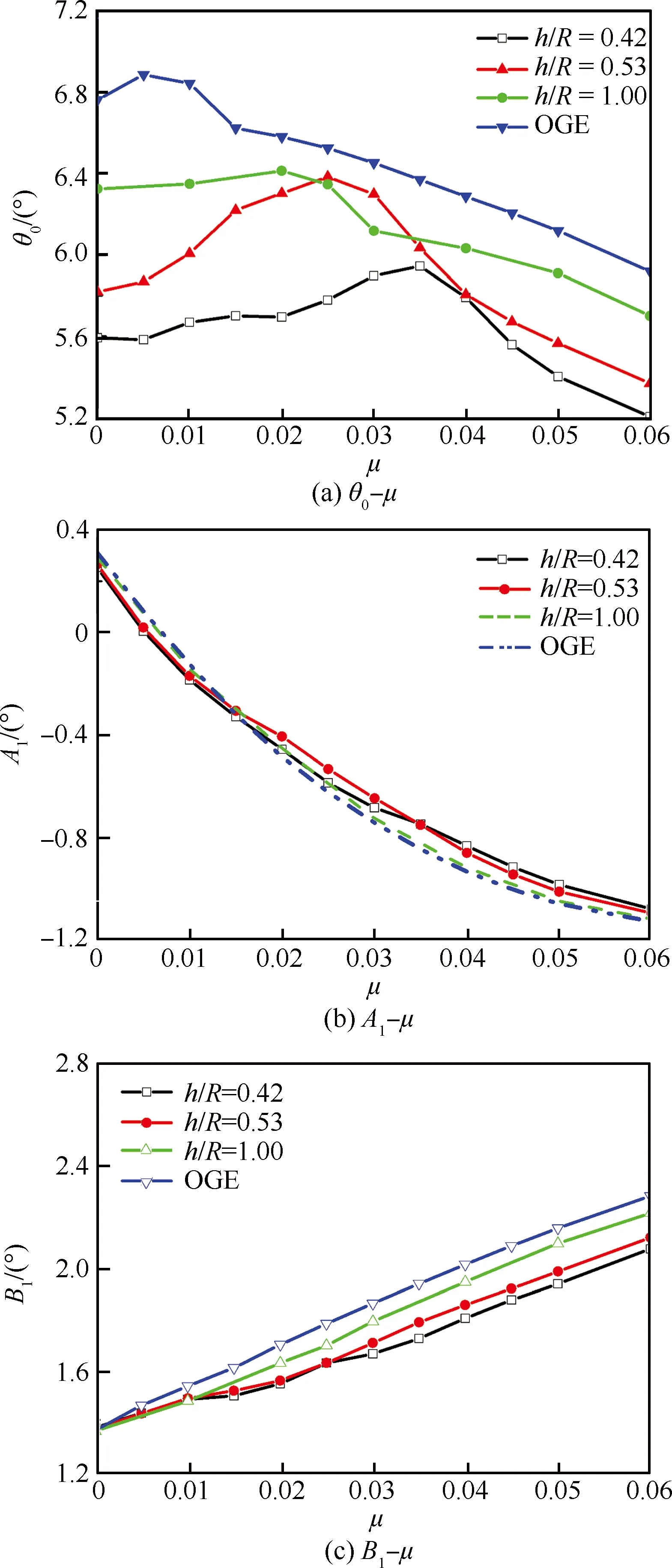
图15 旋翼配平操纵量随前进比、离地高度的变化Fig.15 Variation of rotor trim value with differentadvance ratios and different flight heights
θ=θ0-A1cosψ-B1sinψ
(5)
从图15中可以看出,离地高度越小,总距越小,地面效应越强;总距最大值出现时的前进比随离地高度的减小而增大;将图15(a)与图10对比可以看出,总距的变化规律和旋翼需用功率变化规律一致。横向周期变距随离地高度变化很小,说明地效对横向操纵的影响较小;纵向周期变距随离地高度变化较大,说明地效对纵向操纵的影响较大。这是由于地面效应对纵向诱导速度的分布影响较大,对横向的诱导速度的分布影响较小。旋翼配平时保持俯仰力矩和滚转力矩为零,吹风挥舞引起的侧倒角在一定范围内随前进比增大而增大,所以横向周期变距随前进比增大而减小;吹风挥舞引起的后倒角随前进比增大而增大,所以纵向周期变距随前进比增大而增大。
5 结 论
1) 本文提出并建立的遗传算法/拟牛顿法迭代混合算法适用于直升机旋翼配平计算,且效率较高;基于动量源和非结构网格技术的流场求解方法能高效地模拟直升机旋翼贴地飞行流场;“移动地面”更接近真实物理情况,在进行直升机旋翼地面效应状态下流场模拟时有必要采用移动地面边界条件。
2) 同一工作状态,离地高度越小,拉力增益越大;给定旋翼拉力系数,离地高度越近,需用功率越小,地面效应越强。桨叶载荷越大,需用功率越大,地面效应越强。
3) 从悬停转入前飞时,地面涡逐渐出现,该涡呈马蹄形,前部离地较近,涡较集中;后部逐渐抬高,涡量逐渐扩散。随着前进比的增大,纵向位置顺来流方向移动、轴向位置向地面移动,地面涡不断扩散,直至最后不断减弱消失。同时,地面涡随着离地高度的增加而减弱。
4) 与无地效的情况相比,有地效时,旋翼的总距和纵向周期变距变小,而横向周期变距变化很小。
5) 旋翼诱导速度变化情况较复杂,横向诱导速度变化较小,纵向诱导速度变化较大。随离地高度的增大,向下的诱导速度大体上增大;在一定范围内,随着前进比的增大,诱导速度总体上先增大后减小。
[1]HAYDEN J S. The effect of the ground on helicopter hovering power required[C]//Proceedings of the 32nd American Helicopter Society Forum. Washington, D. C.: AHS, 1976: 10-12.
[2]CURTISS H C, SUN M, PUTMANET W F, et al. Rotor aerodynamics in ground effect at low advance ratios[J]. Journal of the American Helicopter Society, 1984, 29(1): 48-55.
[3]LIGHT J S. Tip vortex geometry of a hovering helicopter rotor in ground effect[J]. Journal of American Helicopter Society, 1993, 38(2): 34-42.
[4]GANESH B. Unsteady aerodynamics of rotorcraft at low advance ratios in ground effect[D]. Atlanta: Georgia Institute of Technology, 2006.
[5]GANESH B, KOMERATH N. Study of ground vortex structure of rotorcraft in ground effect at low advance ratios: AIAA-2006-3475[R]. Reston: AIAA, 2006.
[6]NATHAN N D, GREEN R B. The flow around a model helicopter main rotor in ground effect[J]. Experiments in Fluids, 2012, 52(1): 151-166.
[7]CHEESEMAN I C, BENNETT W E. The effect of ground on a helicopter rotor in forward flight: ARC R&M 3021[R]. London: Aeronautical Research Council, 1955.
[8]张西. 基于试飞的直升机悬停状态地面效应[J]. 南京航空航天大学学报, 2010, 42(2): 166-169.
ZHANG X. Helicopter hover ground effect based on flight test[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2010, 42(2): 166-169 (in Chinese).
[9]JOHNSON W. Helicopter theory[M]. Princeton: Princeton University Press, 1980: 38-48.
[10]康宁, 孙茂. 旋翼尾流与地面干扰时地面涡现象的研究[J]. 力学学报, 1998, 30(5): 104-109.
KANG N, SUN M. Investigation of the ground vortex phenomenon due to the interaction between rotor’s wake and the ground[J]. Chinese Journal of Theoretical and Applied Mechanics, 1998,30(5): 104-109 (in Chinese).
[11]康宁, 孙茂. 旋翼贴地飞行时诱导速度的Navier-Stokes方程计算[J]. 空气动力学学报, 1998, 16(2): 82-86.
KANG N, SUN M. Navier-Stokes calculations of induced velocity of a rotor in forward flight with ground effect[J]. Acta Aerodynamica Sinica, 1998, 16(2): 82-86 (in Chinese).
[12]叶靓, 招启军, 徐国华. 基于非结构嵌套网格方法的旋翼地面效应数值模拟[J]. 航空学报, 2009, 30(5): 780-786.
YE L, ZHAO Q J, XU G H. Numerical simulation on flowfield of rotor in ground effect based on unstructured embedded grid method[J]. Acta Aeronautica et Astronautica Sinica, 2009, 30(5): 780-786 (in Chinese).
[13]KUTZ B M, KOWARSCH U, KEßLER M. Numerical investigation of helicopter rotors in ground effect: AIAA-2012-2913[R]. Reston: AIAA, 2012.
[14]SPALART P, ALLMARAS S. A one-equation turbulence model for aerodynamic flows[J]. AIAA Journal, 1992, 439(1): 5-21.
[15]RAJAGOPALAN R G, LIM C K. Laminar flow analysis of a rotor in hover[J]. Journal of the American Helicopter Society, 1991, 36(1): 12-23.
[16]王博, 招启军, 徐国华. 基于动量源方法的直升机旋翼/机身流场数值模拟[J]. 直升机技术, 2008(3): 24-30.
WANG B, ZHAO Q J, XU G H. Numerical simulations for the flowfield of helicopter rotor/fuselage based upon momentum-source method[J]. Helicopter Technique, 2008(3): 24-30 (in Chinese).
[17]高正, 陈仁良. 直升机飞行动力学[M]. 北京: 科学出版社, 2003: 4.
GAO Z, CHEN R L. The helicopter flight dynamics[M]. Beijing: Science Press, 2003: 4 (in Chinese).
[18]冯德利, 招启军, 徐国华. 基于CFD方法的直升机前飞状态配平分析[J]. 航空学报, 2013, 34(10): 2256-2264.
FENG D L, ZHAO Q J, XU G H. Trim analysis of helicopter in forward flight based on CFD method[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(10): 2256-2264 (in Chinese).
[19]RAYMOND E M, SUSAN L A. Steady and periodic pressure measurements on a generic helicopter fuselage model in the presence of a rotor: NASA TM 210286[R]. Hampton: Langley Research Center, 2000.
[20]HEYSON H H. Operational implications of some NACA/NASA rotary wing induced velocity studies: NASA-TM-80232[R]. Hampton: Langley Research Center, 1980.
朱明勇男, 硕士研究生。主要研究方向: 直升机空气动力学和直升机计算流体力学。
E-mail: zhumingyong@nuaa.edu.cn
招启军男, 博士, 教授, 博士生导师。主要研究方向: 直升机计算流体力学、 直升机空气动力学及流动控制、 气动噪声、 总体设计。
Tel: 025-84893753
E-mail: zhaoqijun@nuaa.edu.cn
王博男, 博士, 讲师。主要研究方向: 直升机计算流体力学、 直升机空气动力学、 新概念旋翼飞行器气动设计等。
Tel: 025-84893753
E-mail: wangbo@nuaa.edu.cn
Simulation of helicopter rotor in ground effect based onCFD method and hybrid trim algorithm
ZHU Mingyong, ZHAO Qijun*, WANG Bo
National Key Laboratory of Science and Technology on Rotorcraft Aeromechanics, Nanjing University of Aeronautics and Astronautics, Nanjing210016, China
A computational fluid dynamics (CFD) method based on the unstructured grid technique and momentum source method is developed aimming at simulating the unsteady aerodynamic characteristics of a rotor in ground effect (IGE). In this method, the three-dimensional Navier-Stokes equations have been taken as governing equations, the discretization of convective fluxes and the time marching are completed by Jameson scheme and the five-step Runge-Kutta iteration method respectively, and one equation Spalart-Allmaras turbulence model has been employed. The rotor is modeled as a distribution of momentum source to simulate the ground effect more realistically, the boundary of “moving ground” is used instead of the conventional “stationary ground”, and the grids near the rotor plane and between the rotor and the ground are refined to capture the ground vortex more accurate. Considering the motion and control of the rotor in the actual flight environment, the rotor trim is taken into account in the simulation of the rotor flowfield. The aerodynamic forces of trim equations are given by coupling of CFD method and momentum-blade element theory model. In order to improve the robustness and efficiency of the trim method, the genetic algorithm/quasi Newton hybrid iterative algorithm is proposed and established. Firstly, the method is used to calculate the rotor thrust increment and rotor power required in ground effect. The calculated results are compared with the experimental results aimming at verifying the validity of the method, the problem of ramp increment of rotor power required at a low speed flight has been solved which is difficult for wake analysis methods. Then, the flowfields of UH-60A helicopter rotor in different flight heights different advance ratios have been calculated, meanwhile the difference of the rotor power required, induced velocity, ground vortex and rotor control are investigated. The calculated results show that the ground vortex appears at small advance ratio; with increase of the advance ratio, it moves along inflow direction in the longitudinal plane and moves close to the ground in axial direction, then, it becomes weak continuously and finally disappears.
rotor; in ground effect; unsteady aerodynamic characteristics; ground vortex; trim analyses; Navier-Stokes equations
2015-09-03; Revised: 2015-11-24; Accepted: 2015-12-04; Published online: 2015-12-2513:23
National Natural Science Foundation of China (11272150)
. Tel.: 025-84893753E-mail:zhaoqijun@nuaa.edu.cn
2015-09-03; 退修日期: 2015-11-24; 录用日期: 2015-12-04;
时间: 2015-12-2513:23
www.cnki.net/kcms/detail/11.1929.V.20151225.1323.002.html
国家自然科学基金 (11272150)
.Tel.: 025-84893753E-mail: zhaoqijun@nuaa.edu.cn
10.7527/S1000-6893.2015.0335
V211.52
A
1000-6893(2016)08-2539-13
引用格式: 朱明勇, 招启军, 王博. 基于CFD和混合配平算法的直升机旋翼地面效应模拟[J]. 航空学报, 2016, 37(8): 2539-2551. ZHU M Y, ZHAO Q J, WANG B. Simulation of helicopter rotor in ground effect based on CFD method and hybrid trim algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(8): 2539-2551.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
URL: www.cnki.net/kcms/detail/11.1929.V.20151225.1323.002.html