二维激光扫描车辆行驶跑偏量测量研究*
2016-11-12周兴林吕文莎伍洋尹皓晖
周兴林 吕文莎 伍洋 尹皓晖
(武汉科技大学,武汉 430081)
二维激光扫描车辆行驶跑偏量测量研究*
周兴林吕文莎伍洋尹皓晖
(武汉科技大学,武汉 430081)
为解决车辆行驶跑偏的高精度测量问题,设计了一种车辆行驶跑偏量自动测量系统,建立了基于二维激光扫描的车辆行驶跑偏量测量模型,提出了优化数据处理算法,解决了靶标数据处理精度低的难题,构建的多传感器组合测量网络实现了车辆行驶跑偏量实时自动测量。通过实车试验对该系统进行了验证,结果表明,该测量系统可以实现在较大范围内的高精度实时测量,测量方法简单快捷,运行稳定可靠,能够适应各种车型的匀速跑偏、制动跑偏等不同类型的跑偏量测量。
主题词:车辆行驶跑偏二维激光扫描自动测量
1 前言
车辆在平直路面上行驶时,驾驶员将车辆调整到直行状态后,在不对转向盘施加任何外力下自行向一侧方向偏驶的异常现象称为车辆行驶跑偏,在指定测量距离内被测车辆实际行驶轨迹相对于理想直行轨迹的最大差值称为车辆跑偏量。车辆行驶跑偏会加速轮胎磨损,引发爆胎、车辆失控等危险状况,进而诱发交通事故。因此,为避免有跑偏隐患的车辆流入市场,跑偏量是车辆出厂检测的必检项。
目前,国内外学者对车辆行驶跑偏检测方法进行了大量研究[1~4],主要有GPS、光纤传感、CCD摄像等测量方法,这些方法在测量精度、设备成本、稳定性等方面存在一些缺陷。对于车辆出厂跑偏测量而言,理想的测量系统需综合满足精度、稳定性、工作效率、成本和操作便利性等五方面要求,为此设计了一种基于二维激光扫描[5~7]的车辆行驶跑偏量自动测量系统(下称激光扫描测量系统),建立了系统模型并提出了优化数据处理算法,实现了高精度的车辆行驶跑偏量测量,同时通过实车试验验证了该系统的可靠性和实用性。
2 激光扫描测量系统设计
2.1激光扫描测量系统组成
如图1所示,激光扫描测量系统主要由两台二维激光扫描传感器、3组对射式光电传感器、移动车辆VIN码读取传感器及显示终端(简称移动显示终端)、测量主控制计算机(简称测量主机)和高精度圆柱靶标等组成。
实际测量时,在距测量区道路起点1/4处和3/4处各安装1台SICK公司的LMS511-10100型室外高精度二维激光扫描传感器;在测量区起点、测量区中点和测量区终点的两侧安装一组对射式光电传感器;靶标固定在被测车辆顶部。光电传感器和激光扫描传感器分别用于车辆到位信号和测量数据的采集,利用光电传感器采集的车辆到位信号触发对应的激光扫描传感器连续采集的靶标数据;测量主机用于发送测量命令、分析处理数据;移动显示终端与主机建立信息交互的联系,实现测量结果与被测车辆的一一对应。
2.2激光扫描测量系统通信及工作原理
激光扫描传感器和光电传感器分别通过以太网与测量主机连接,移动显示终端与测量主机无线连接。系统开始测量时,试车员利用移动显示终端扫描车辆识别码并通过无线网络发送至测试主机。车辆通过测试区过程中,当第1组光电传感器被触发时,驱动第1台激光扫描传感器连续采集靶标数据;第2组光电传感器被触发时,驱动第2台激光扫描传感器采集数据,同时终止第1台激光扫描传感器采集任务;第3组光电传感器被触发时数据采集结束。测量数据经由以太网实时传送给测试主机,并通过封装函数实现测试主机对测量数据的处理分析。最终,测试主机通过无线网络向移动显示终端发送跑偏测量结果。图2为激光扫描测量系统通信流程。
3 激光扫描测量系统模型的建立
3.1激光扫描传感器数学模型
激光扫描测量系统中包括全局坐标系和激光扫描传感器平面坐标系。激光扫描传感器数学模型实际是要建立激光扫描传感器平面坐标与全局坐标之间的转换关系,由于两台激光扫描传感器的坐标转换原理相同,因此以1台激光扫描传感器为例,其坐标转换如图3所示。
激光扫描传感器固有的坐标系是以极坐标形式表示,在此基础上建立扫描平面OtXtYt坐标系,其坐标原点与激光扫描传感器极坐标原点(即激光出射点)重合,x轴正方向与极坐标的零度线重合。根据激光扫描传感器返回的原始测量点极坐标(r,θ),进行极坐标与二维扫描平面坐标转换[8]:
激光扫描测量系统建立以道路中心线垂直线为横坐标、道路中心线平行线为纵坐标的OXY全局坐标系。为了实现扫描平面坐标系OtXtYt到全局坐标系OXY的转换,根据平面坐标系转换原理[9,10],系统存在如下转换关系:
式中,旋转参数α是系统全局坐标系在扫描坐标系中的方位角;平移参数(x*,y*)是系统全局坐标系原点在该扫描坐标系中的坐标。
由于两台激光扫描传感器固定安装在激光扫描测量系统中,因此各激光扫描传感器平面坐标系与全局坐标系的转换矩阵参数也固定,可通过标定求解各自的转换参数,进而将各激光扫描传感器坐标系中的测量数据统一到系统全局坐标系下。
3.2车辆行驶跑偏量测量模型
在统一坐标系的基础上,建立激光扫描测量系统的车辆行驶跑偏量测量模型,在全局坐标系OXY下进行跑偏参数的计算。如图4所示,车辆进入测试区后,通过激光扫描传感器扫描获取各时刻的被测车辆实际行驶跑偏轨迹点坐标,其中被测车辆实际行驶轨迹上初始两点和终止两点的坐标分别为A(XA,YA)、B(XB,YB)、C(XC,YC)、D(XD,YD)。根据被测车辆行驶轨迹上初始两点A和B,可确定被测车辆在不发生跑偏情况下的理想行驶轨迹(直线)并得到该轨迹上终点坐标
从理论分析出发,认为两相邻实际轨迹点所在直线与道路中线之间的夹角是被测车辆的偏转角,同一纵坐标值下的实际轨迹点与理想轨迹点间的横坐标之差是被测车辆的偏移量。据此被测车辆从测量起点到测量终点这段距离内的跑偏参数计算如下。
被测车辆的瞬时速度为:
式中,i为轨迹点序号;f为激光扫描传感器的扫描频率。
被测车辆的瞬时偏转角为:
被测车辆的跑偏量为:
被测车辆的跑偏角为:
被测车辆的跑偏方向为:若跑偏角Δθ>0,则被测车辆向右跑偏;若跑偏角Δθ<0,则被测车辆向左跑偏。
4 数据处理
为了获取被测车辆在实际跑偏行驶中的坐标,利用二维激光扫描技术与高精度靶标配合测量,并提出一种优化的靶标中心拟合算法来精确获取被测车辆的轨迹点坐标。
由于测量过程中受外界因素影响,固定在被测车辆顶部的圆柱靶标往往会发生倾斜。在这种情况下,激光平面与靶标相交得到的不再是理想状态下的圆形,而是椭圆,因此靶标中心的拟合算法采用椭圆中心拟合进行,并将激光扫描传感器扫描靶标一次得到的测量点数据作为靶标中心拟合一次的测量点数据。在激光扫描传感器测量平面OtXtYt坐标系内,靶标的被测截面(图5)为任意位置的椭圆,它由椭圆中心坐标(x0,y0)、长轴半径a、短轴半径b、长轴与x轴的夹角θ等几何参数来确定[11]。
靶标被测截面的椭圆方程为:
式(7)用代数形式可表示为:
对于椭圆拟合而言,由于靶标上测量点不完整及测量点可能存在误差的原因,式(8)的拟合结果可能退化为双曲线,因此对椭圆方程增加约束条件,拟合椭圆方程必须满足以下约束:
式(8)可利用最小二乘法[12,13]直接求解,即利用目标函数f的最小值来确定各系数,目标函数f的表达式为:
由此,对靶标被测截面上的n个测量点的数据进行最小二乘算法处理,结合约束条件就可求得方程系数A、B、C、D、E、F值,实现靶标被测截面椭圆的几何参数计算。再根据式(11)求得靶标被测截面椭圆的中心坐标(x0,y0),即得到靶标中心拟合的初始估计值。
在对靶标中心进行修正时,首先要对已知的测量点坐标进行修正以得到新的数据点,然后利用新数据点拟合获取优化的靶标中心。为方便计算,引入坐标系OsXsYs,如图6所示。该坐标系的原点是初始拟合椭圆的中心坐标(x0,y0),x轴与初始拟合椭圆中的长轴重合,y轴与初始拟合椭圆中的短轴重合,则:
为计算各测量点Psi到该椭圆的距离。首先利用测量点Psi与该点在拟合椭圆上最近点P′si的连线,与在P′si处椭圆的法线方向平行的几何关系来解算P′si,即
然后根据两点间距离公式,计算各测量点Psi到椭圆上最近点P′si的距离hi。取距离之和的均值作为修正测度r,即按照最小化测量点与椭圆间距离的原理,对各测量点坐标进行修正,则各测量点与对应的新数据点的坐标差值(Δx,Δy)表示为:
利用求得的(Δx,Δy)对测量点坐标进行修正,再将修正后的新数据点坐标转换到OtXtYt坐标内重新进行最小二乘椭圆拟合,直到拟合椭圆上数据点个数最多即为最优椭圆,此时便得到最优的靶标被测截面椭圆的中心坐标。
5 试验验证
5.1靶标识别精度测试
在试验现场,在与激光扫描传感器等距离的圆弧上选择12个不同位置放置圆柱靶标,如图7所示。图7中,G为扫描角度范围内的中心位置,则左侧的A、B、C、D、E、F等6个位置倾角分别为90°、80°、70°、60°、50°、30°;a1,b1,c1,d1,e1,f1等6个位置与激光扫描传感器距离为50 m;a2,b2,c2,d2,e2,f2等6个位置与激光扫描传感器距离为60 m;扫描过程中激光扫描传感器位置保持不变。
距激光扫描传感器50 m处的6个标靶间的5段距离分别为a1b1、b1c1、c1d1、d1e1、e1f1,距激光扫描传感器60 m处的6个标靶间的5段距离分别为a2b2、b2c2、c2d2、d2e2、e2f2。分别测量这10段距离,取各段距离的平均值作为真值。二维激光扫描传感器对同一距离不同角度位置上的靶标进行多次扫描,利用优化处理算法提取靶标中心并计算靶标间的距离,以测试该激光扫描测量系统在不同距离和角度下对靶标识别的精度,测量结果见表1。
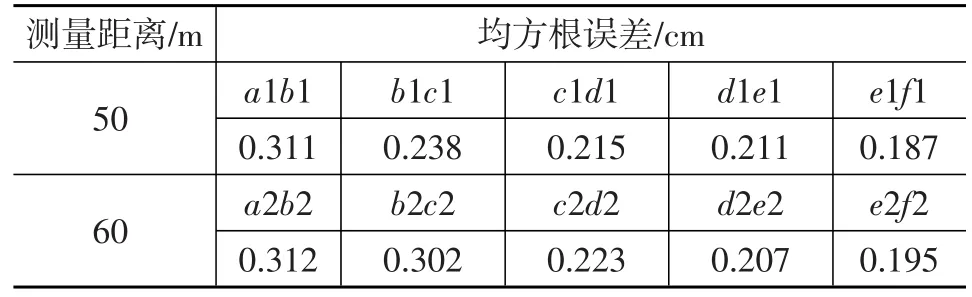
表1 靶标精度测量结果
由表1可知,测量结果的均方根误差不超过0.312 cm,具有相对较好的靶标识别精度。
5.2跑偏试验与结果
该车辆行驶跑偏量测量系统的测量区长度设置为60 m,被测车辆以30 km/h速度匀速通过测量区,采用50 Hz扫描频率、0.166 7°角度分辨率及190°扫描范围的激光扫描传感器进行测量。为了验证所设计测量系统的测量性能和精度,利用现场高精度的动态GPS测量系统对被测车辆进行同步检测,动态GPS系统的定位精度为1 cm+1×10-6,将动态GPS系统获得的轨迹点数据进行相应的跑偏参数计算,与激光扫描测量系统的测量结果进行对比分析,如图8所示。通过对测量点数据进行处理分析,在同一坐标系下,一次测量时激光扫描测量系统得到的被测车辆行驶跑偏轨迹坐标与对应的动态GPS系统得到的轨迹坐标的平均差值为0.82 cm,偏差值在允许范围(±1 cm)内,表明所设计的激光扫描测量系统稳定可靠。
利用车辆行驶跑偏量测量系统进行了5次重复测量,将得到的测量数据坐标代入车辆行驶跑偏量测量模型,计算得到了相应的跑偏参数,测量结果如表2所列。

表2 跑偏量测量结果 cm
由表2可知,激光扫描测量系统5次测量的跑偏量误差均在1 cm以内,误差标准差σ为0.79 cm,据此说明该激光扫描测量系统的测量方法可靠、工作稳定,完全可以满足测量误差在1 cm以内的车辆行驶跑偏量测量要求。
6 结束语
设计了高精度二维激光扫描车辆行驶跑偏量自动测量系统,该系统使用两台激光扫描传感器,克服了单台激光扫描传感器测量范围小,测量精度随距离增加而降低的缺点。同时利用数学建模方法和靶标中心拟合优化处理算法实现了车辆行驶跑偏量的精确测量和计算。该系统采用的非接触式激光扫描自动测量方法运行可靠、测量速度快、精度高、对环境要求低,能够实现在整个测量场地范围内的全天候实时自动测量。同时,该方法可适用于各种车型和各种跑偏类型的跑偏量测量,具有较高实用性。
1Jung Claudio Rosito,Kelber Christian Roberbo.Lane following and lane departure using a linear-parabolic model.Image and Vision Computing,2005,23(13):1192~1202.
2安长江,李文勇.基于GPS技术的汽车跑偏量测量方法研究.汽车工程,2009,31(9):804~806.
3柯捷.基于布拉格光纤光栅传感器的车辆行驶跑偏测量系统的研究:[硕士论文].武汉:武汉理工大学,2012.
4何耀华,厉晓飞.汽车跑偏测量系统中的相机标定技术研究.汽车技术,2011(8):46~50.
5伊婷.三维激光扫描数据处理技术的研究:[硕士论文].武汉:武汉理工大学,2015.
6Clynick T J.Optical video projection using laser beam scanning technology.International Society for Optics and Photonics Electronic Imaging Device Engineering,1993,316~321.
7Lindstrom M,Eklundh J O.Detecting and tracking moving objects from a mobile platform using a laser range scanner.Proceedings of 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems,Maui,2001,3:1364~1369.
8杨伟,刘春,刘大节.激光扫描数据三维坐标转换的精度分析.工程勘察,2004(3):61~63.
9刘尚国,于胜文,姚守峰.平面坐标系转换规则解析及在曲线测设中的应用.测绘工程,2011,20(3):58~61.
10王凤艳,韩东亮,张元元,等.基于轴对准法的坐标系生成与转换.测绘通报,2013(7):43~45.
11刘书桂,李蓬,那永林.基于最小二乘原理的平面任意位置椭圆的评价.计量学报,2002,23(4):245~247.
12钮毅.部分遮挡条件下椭圆目标识别:[硕士论文].上海:上海交通大学,2007.
13闫蓓,王斌,李媛.基于最小二乘法的椭圆拟合改进算法.北京航空航天大学学报,2008,34(3):295~298.
(责任编辑文楫)
修改稿收到日期为2016年5月28日。
Study on Vehicle Driving Wandering Measurement with 2D Laser Scanning
Zhou Xinglin,Lv Wensha,Wu Yang,Yin Haohui
(Wuhan University of Science and Technology,Wuhan,430081)
In order to achieve high precision measurement of vehicle driving wandering,a new vehicle driving wandering automatic measuring system was designed.Vehicle driving wandering measurement model was established based on 2D laser scanning,the optimized data processing algorithm was proposed to solve the problem that the target data processing features low accuracy,the multi-sensor combination measurement network realized real-time automatic measurement of vehicle driving wandering.Validity of this system is proved through vehicle test,the results show that the measurement system can achieve high precision and real time measurement in a large range,and the measurement method is simple and fast,with reliable and stable operation,and it can adapt to various vehicles of running deviation measurement and different types of deviation measurement.
Vehicle driving wandering,2D laser scanning,Automatic measurement
U467.499
A
1000-3703(2016)10-0007-05
国家标准委项目(20153973-T-339);国家自然科学基金项目(51578430,51378243);
湖北省科技支撑计划项目(2014BEC055);湖北省自然科学基金项目(2015CFA064)资助。
