基于虚拟磁链定向的并联型整流器控制方法
2016-11-11兰森林朱修敏
马 黎,兰森林,魏 力,朱修敏
(西华大学 电气与电子信息学院,成都 610039)
●电网设备●
基于虚拟磁链定向的并联型整流器控制方法
马黎,兰森林,魏力,朱修敏
(西华大学 电气与电子信息学院,成都 610039)
为解决整流器并联产生的环流而导致并联系统的能量损耗增加,交流侧电流的畸变升高,功率因数下降,器件的寿命降低等问题,利用虚拟磁链定向的矢量控制方法建立了新的系统模型,并且采用零序向量前馈控制策略对并联系统的环流进行控制,不仅使并联系统获得了无网压传感器整流器的优点,而且与传统并联型整流器相比增加了系统的稳定性。仿真结果验证了这种控制方法的可行性和有效性。
整流器并联;环流控制;虚拟磁链;零序向量前馈控制
并联型整流器因具有电网侧无谐波污染、单位功率因数、高容量以及功率控制系统的高稳定性、高效率等特点,得到了广泛应用[1-4]。而并联系统能否进行控制的关键在于其环流值的大小是否限制在允许值范围内。由于环流会增加并联系统的能量损耗,降低系统的效率和功率因数,因此使网侧电流发生了畸变,减少了开关管的使用寿命。环流抑制的方法有:耦合电感法,优点是能够较好地抑制高频零序环流,但难以对低频环流取得较好的效果;相间阻抗法,虽然能够减小环流,但是也浪费了大量的能量;隔离变压器法,虽然切断了零序环路,从根本上避免了环流的产生,但是也有体积大、成本高、不利于实际运用的缺点;外加调节器法和对共模差模电流抑制的方法,虽然在理论上能够得到很好的效果,但是也使得控制系统变得格外复杂,从而限制其实际应用[5-6]。为了能够既满足能量损耗小且控制系统更为简单的要求,本文借鉴了带宽扩展思想在抑制环流中的应用,通过减少0轴电流环的带宽,来使系统的动态响应变慢,抑制环流,反之亦然[7]。
电动汽车和直流微网促使了中、大功率并联系统整流器的广泛应用,但是目前并联系统中普遍存在着传感器过多的缺点,这对整流器的成本控制和并联系统的稳定性都会产生不利的影响。为解决此问题,本文提出把网侧无电压传感器的方法应用到并联系统中[8-10]。
基于上述,本文分别建立了并联系统的数学模型和零序环流数学模型,并对采用的抑制零序环流控制方法进行仿真验证。
1 整流器并联系统建模
1.1并联系统数学模型的建立
两个电压型PWM整流器组合成一个并联系统,如图1所示。

ea、eb、ec—三相对称的电网电压;L1、L2—整流器1和整流器2的滤波电感;Rs1、Rs2—线路电阻;Umx(m=a、b、c为相数)—交流侧电压;C—直流侧电容;RL—负载。
图1三相PWM整流器并联结构图
Fig.1Parallel structure of three phase PWM rectifier
利用基尔霍夫电压电流定律建立了并联整流器的空间状态方程。并联系统中的环流可以被定义为
izx=iax+ibx+icx
式中:x=1、2,代表整流器的编号。
并联系统在三相静止坐标系下的数学模型为

通过坐标变换,则变换到旋转坐标系dq下的数学模型为

(1)
将式(1)左右分别乘上ed,且将并联系统稳态时iq=0带入上式(1),然后化简可以得到
(2)
并联系统的状态方程为
(3)
式中:Le=Lx/ed,Re=Rsx,usd和usq是d、q轴向的电压分量。
在并联系统中,分析其环流路径,由基尔霍夫电压电流定律可以得到零序环流的数学模型为
式中,Δdz=dz1-dz2。
1.2功率估计和磁链估计
在DPC控制策略中,瞬时功率估算通常在两相静止αβ坐标系下进行。在并联系统稳态时,由于相应磁链幅值的变化率为零,即dψm/dt=0,则瞬时功率表达式可简化为
式中:ψm为虚拟磁链矢量ψ的幅值,ω为电网基波角频率。
通过坐标变换,可以得到式(3)中有功功率和无功功率p、q的计算式为
在图1中,借鉴交流电机磁链观测的方法来观测虚拟电网磁链。在并联系统中的网侧电压相当于三相交流电机的反电动势,网侧电感相当于电机绕组的漏感,等效电阻相当于电机绕组的电阻。则两相静止坐标系下的磁链估计计算式为
(4)
式中:uαx、uβx为VSR输出电压矢量αβ轴的分量。显然,uαx、uβx可由VSR的直流侧电压udc和相应开关函数Sax、Sbx、Scx调制而成,即
式中:Sax、Sbx、Scx分别为A、B、C三相对应的开关函数。
利用式(4)进行磁链估算,因存在积分运算,故会对误差进行累积,最终必将会对系统进行严重的干扰,所以克服积分漂移问题尤为重要。本文借鉴改进虚拟磁链观测器来克服磁链的积分漂移问题。依靠带饱和限幅反馈环节的积分器来代替纯积分环节,如图2所示。
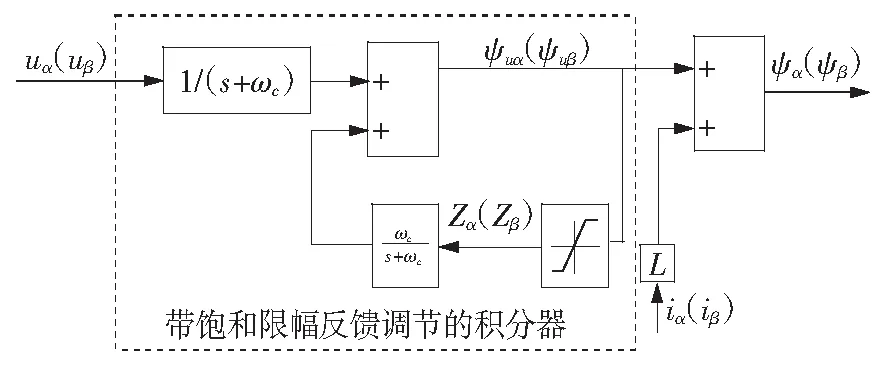
图2 带饱和限幅反馈环节的磁链观测器
控制思想为当积分输出值小于限幅值ψmax时,磁链观测器相当于对uα的纯积分;当积分输出值大于限幅值ψmax时,则磁链观测器的输出被限定为最大值。若输入信号反向则输出信号与之前一样变化,最终达到克服磁链积分漂移的目的。
则磁链观测器的输出为(以α轴分量为例)
2 零序环流的抑制
本文研究两个电压型PWM整流器的并联,并联系统共用一个电压外环,每一个并联模块都有各自的功率内环控制回路,其控制框图如图3所示。

图3 并联整流器的控制框图
由式(2),令
则功率内环的控制框图如图4所示,稳态时电网电压的d轴分量是不变的,可以取ed=311 V。

图4 功率内环控制框图
当并联系统存在环流时,环流流经整流器1、整流器2与线路阻抗构成闭合回路。所以一般只需要控制其中一个整流器就能够达到抑制环流的目的。对整流器2中传统SVPWM信号进行改进,如图5所示。

图5 整流器2中SVPWM一个周期内的信号分布图
非零向量的占空比为d1和d2,则零向量的占空比d0=1-d1-d2。在每个控制周期内的控制向量Us由两个非零向量Ui(i=1,2,3,4,5,6)和两个零向量Uj(j=0,7)合成,如图6所示。

图6 控制电压矢量与基准电压矢量图
引入了控制变量y对整流器2中的零序电压向量占空比进行控制,通过改变Δdz的值来改变零序电压的大小,进而控制零序环流的大小。
整流器2零序环流的占空比为

则并联系统零序环流表达式为
零序环流的控制模型可以表示为
借鉴把带宽扩展应用到零序环流控制中的思想,当Δdz减小时会使得零序电流环的带宽减小,会使得PI控制器的动态响应变慢,进而使得环流的抑制效果减弱。所以需估计出一个合适的Δdz,让环流影响降到最低,同时零轴电流环的带宽值合适,让系统的动态响应最优。在考虑系统的采样延迟和响应延迟后,零序电流环控制系统的简化模型如图7所示。
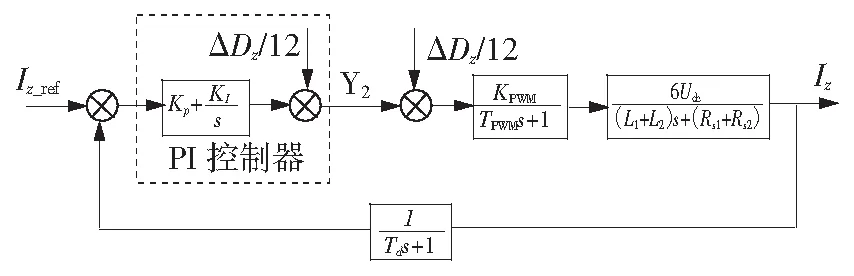
图7 基于传统PI控制思想的零序反馈控制策略
则零序反馈控制变量可以被表示为
3 仿真结果及分析
在SIMIULINK中搭建仿真模型进行实验验证,对比引入变量y进行校正前后零序环流的波形图。仿真中,网侧三相对称电压的有效值为220 V,电感参数L1=6 mH,L2=5.4 mH,寄生电阻Rs1=0.5 Ω,Rs2=0.7 Ω,直流侧电容C=2200 μF,负载R=15 Ω。校正前后零序环流波形图如图8所示。
从图8可以看到:在0.2 s之前的零序环流波形是没有经过采用零序环流抑制策略进行控制的,零序环流总体上呈正弦波动,且包含有一系列的杂波,峰值为25 A;在0.2 s时刻加入零序环流控制策略,零序环流经过一个短暂的上升后,在0.02 s以内就被削减到0上下。分析波形的变化可以知,整流器因为参数的不同或是控制信号的不同步,会导致Δdz的值变大,进而导致零序环流的值很大。当控制系统减少了0轴电流环的带宽时,就会使得Δdz的影响减弱甚至消除,从而达到环流抑制的目的。并联系统有功功率和无功功率波形图如图9所示。

图8 校正前后零序环流波形图
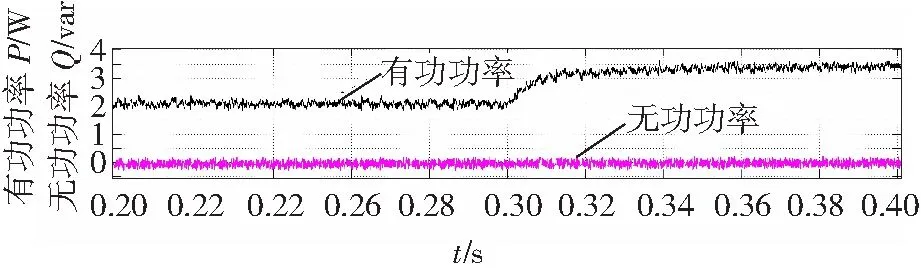
图9 并联系统有功功率和无功功率波形图
从图9可以看到,在0.3 s时,并联系统的负载突然增加,直流侧并联电阻Rd=30 Ω。0.3 s前系统的有功功率约为23 kW,0.3 s时刻突然增加负载,并联系统经过0.02 s的调整后,有功功功率稳定在35 kW左右,无功功率基本都在0 Var上下波动。
计算的磁链克服了积分漂移之后,以ψα为横轴ψβ为纵轴可以画出稳态时的虚拟磁链圆,如图10所示。
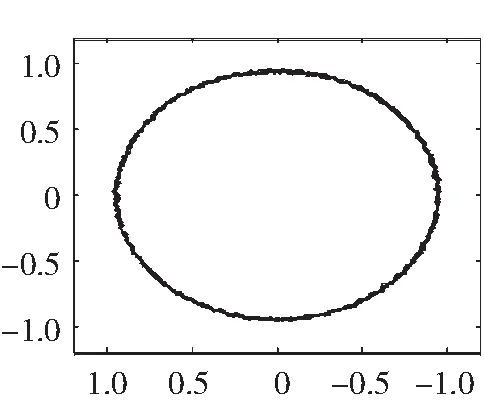
图10 稳态时的虚拟磁链圆
稳态时A相电压电流波形图和在0.4 s时刻对A相电流进行FFT分析如图11所示。

图11 稳态时a相电压电流波形图和0.4 s时刻a相电流FFT分析
由仿真图11可知,A相电流幅值从75 A增加到了107 A,直流侧电压在经过了0.05 s后稳定在了600 V,如图12所示。

图12 直流侧输出电压波形图
从图12可以看到,此并联系统具有很好的动态性能和直流稳压性能。
4 结 论
本文把带宽扩展思想运用到改进型的空间矢量控制中,取得了很好的环流抑制效果。把无网压传感器控制方法应用到现有的整流器并联系统中,解决了目前并联系统中传感器过多的缺点,并且节约了成本。通过详细的理论分析和仿真验证,证明了本文所提出的改进型控制方法的正确性和有效性。
[1] 刘红昌. 电压型PWM整流器并联方法的研究[D]. 北京:华北电力大学, 2013.
LIU Hongchang. Research on the parallel method of voltage source PWM rectifier[D]. Beijing: NCEPU, 2013.
[2] 肖雄,张勇军,王京,等. 基于全响应功率补偿的电压型PWM整流器直接功率控制[J]. 电工技术学报, 2015, 30(4):
119-126.
XIAO Xiong, ZHANG Yongjun, WANG Jing. Direct power control under three phase boost type pwm rectifiers based on power compensation of complete response[J]. Transactions of China Electrotechnical Society, 2015, 30(4): 119-126.
[3] 吴凤江,汪之文,孙力. PWM整流器的改进虚拟磁链定向矢量控制[J]. 电机与控制学报, 2008, 12(5): 504-508.
WU Fengjiang, WANG Zhiwen, SHUN Li. Improved virtual flux oriented vector control of pwm rectifier[J]. Electric Machines And Control, 2008, 12(5): 504-508.
[4] 王政,郑杨,张兵,等. 并联逆变器馈电PMSM调速系统谐波和环流控制[J]. 电机与控制学报, 2014, 18(12): 64-71.
[5] HOU C G.A multicarrier PWM for parallel three-phase active front-end converters[J].IEEE Trans. Power Electron., 2011,28(6): 2753—2759.
[6] PAN C T, LIAO Y H.Modeling and coordinate control of circulating currents in parallel three-phase boost rectifiers[J].IEEE Trans. Ind. Electron., 2007,54(2):825—838.
[7] GUANG Z X.Deadbeat control strategy of circulating currentsin parallel connection system of three-phase PWM converter[J].IEEE Trans. Ind. Electron.,2014,29(2):406-417.
[8] 赵仁德,贺益康. PWM整流器虚拟电网磁链定向矢量控制仿真研究[J]. 电力系统及其自动化学报, 2005, 17(5): 94-98.
ZHAO Rende, HE Yikang. Simulation study on the virtual line flux oriented vector control of the pwm rectifier[J]. Proceedings of The Electric Power System And Automation, 2005, 17(5): 94-98.
[9] 郑征,景小萍. 虚拟磁链定向的PWM整流器矢量控制研究[J]. 电气传动, 2011, 41(1): 40-43.
ZHENG Zheng, JING Xiaoping. Research for virtual flux oriented vector control of pwm rectifier[J]. Electric Drive, 2011, 41(1): 40-43.
[10] 张颖超,赵争鸣,鲁挺,等. 固定开关频率三电平PWM整流器直接功率控制[J]. 电工技术学报, 2008, 23(6): 76-80,
86.
ZHAO Yingchao, ZHAO Zhengming, LU Ting, et al. Direct power control with constant switching frequency for three-level pwm rectifier[J]. Transactions of China Electrotechnical Society, 2008, 23(6): 76-80, 86.
(责任编辑侯世春)
Parallel Rectifier control method based on virtual flux orientation
MA Li, LAN Senlin, WEI Li, ZHU Xiumin
(College of Electrical and Electronic Information Engineering,Xihua University, Chengdu 610039, China)
The circulation generated by the paralleled rectifier will lead to energy loss in parallel system, the increase of the AC side current distortion, the drop power factor, and the reduction of the life of the device, and so on. In order to solve the problem, this paper utilized the vector control based on virtual flux orientation to establish a new model, and adopted zero-sequence vector feedforward control strategy to control the system circulation. The control method not only inherits the advantages of the parallel system without the network pressure sensor rectifier, but increases the stability of the system compared with the conventional paralleled rectifier. The simulation verifies its feasibility and effectiveness.
paralleled rectifier; circulation control; virtual flux; zero-sequence vector feedforward control
2016-01-27。
马黎 (1992—),女,硕士研究生,研究方向为电力电子与电力传动。
TM461
A
2095-6843(2016)04-0318-05
