确定性多变量非线性系统的在线修正参数预测滤波PID控制
2016-11-10侯小秋
侯小秋
(黑龙江科技大学 电气与控制工程学院, 黑龙江 哈尔滨 150022)
确定性多变量非线性系统的在线修正参数预测滤波PID控制
侯小秋
(黑龙江科技大学 电气与控制工程学院, 黑龙江 哈尔滨 150022)
针对确定性多变量NARMAX模型,分析了其可采用PID控制的约束条件。提出一种增量型预测滤波解耦PID控制算法,基于递推参数估计算法对系统模型进行参数估计,采用逐步迭代预报算法进行预测,结合一种可克服算法病态的直接极小化指标函数的自适应控制算法和Robbins-Monro算法,给出了确定性多变量NARMAX模型的具有在线修正参数的预测滤波PID控制算法,因指标函数中含有输出的预测值,故算法具有加快PID控制参数收敛到有效值速度的性能。仿真研究表明,因为所提出的PID算法具有在线修正参数和预测控制的性能,故系统具有较好的控制品质。
自适应控制;预测控制;PID控制;参数估计;迭代预测;确定性多变量NARMAX模型
PID控制已有许多文献研究其理论和应用问题,其技术关键核心是PID控制参数的离线整定和在线修正及优化,结合近代控制理论已提出了一些PID控制算法。张燕红[1]归纳了PID控制器参数自整定方法,各种方法都有自己的适应对象和特点,而关于具有滤波的PID控制器参数自整定方法研究的文献较少见。任俊如[2]讨论了预测PID控制器的研究现状,归纳起来,主要有两种:(1)基于预测控制原理的扩展PID控制器,主要依据一些先进的控制机理,其本质是基于预测控制原理,由多个PID控制器组合而成的基于模型的扩展PID控制器,是一种便于在DCS上实现的经过简化的预测控制算法;(2)预测原理和PID原理相结合的控制算法,包括预估器和PID控制器,这两部分是分别独立的,类似于Smith预估控制器,最早是由Hagglund在1992年提出,由预测控制和PI控制两部分组成,和普通的PID控制器相比,这种预测PI控制器可以对大滞后过程的输出进行预测,并且具有抑制高频噪声的特点。文献[3]研究了单变量CARMAX模型在线修正参数的自适应PID控制,但所提出的算法不具有预测控制性能和滤波性能,指标函数中只含有输出的当前值,不具有加快PID控制参数收敛速度的性能,但算法对随机干扰的性质要求低;文献[4]研究了具有预测控制性能和滤波性能,并且具有加快PID控制参数收敛速度的单变量随机线性系统的直接极小化指标函数的在线修正参数的自适应PID控制;文献[5]研究了多变量CARMAX模型的直接极小化指标函数的自适应PID控制。本文提出一种具有预测控制性能和滤波性能,并且具有加快PID控制参数收敛速度的直接极小化指标函数的确定性多变量NARMAX模型的自适应预测滤波PID控制。
1 参数估计和预测算法
1.1确定性多变量NARMAX模型
确定性多变量NARMAX模型为

(1)
其中
式中t为离散时刻,y(t)为n维系统输出,u(t)为n维系统输入,Y(t-1)为系统输出集合,U(t-d)为系统输入集合,θ为未知参数,d为系统时滞,F(…)为n维向量函数,f(…)为函数,n1,n2为阶数。
1.2参数估计
未知参数θ采用文献[6]的非线性遗忘因子递推最小二乘算法估计。
1.3迭代预测算法
1.3.1迭代预测算法1

(2)

(3)
式(2)代入式(3)得
(4)
式中F1(…)为n维向量函数。如此迭代得
(5)
式中
令j=d得
(6)
1.3.2迭代预测算法2
由式(1)迭代得到

(7)
式中
1.4采用PID控制的约束条件
由式(1)可知当如下条件成立时,可采用PID控制
(8)
2 多变量增量型预测滤波解耦PID控制
传统的多变量增量型滤波解耦PID控制为
(9)
式中ri(t)为参考输入,Hi(q-1)=1+hiq-1,Δ=1-q-1,Si(q-1)=si,0+si,1q-1+si,2q-2,hi,si,0,si,1,si,2为可调参数。
不失一般性,为书写简化研究n=2情形。则控制器可调参数向量η为

(10)
3.1梯度表达式算法1
式(1)、式(5)两边分别对ηi(i=1,2,…,8)求偏导,得

(11)

(12)
式(10)两边对h1,h2求偏导,得
(13)
(14)
(15)
(16)
式(10)两边分别对sp,l,sk,l求偏导,得

(17)

(18)
3.2二阶导数矩阵表达式算法1
式(11)两边对ηl(l=1,2,…,8)求偏导,得
(19)
式(12)两边对ηp(p=1,2,…,8)求偏导,得
(20)
式(13)两边对h1求偏导,得
(21)
同理可求得∂2u1(t)/∂hk∂hp,∂2u2(t)/∂hk∂hp。式(13)两边对s1,l(l=0,1,2)求偏导,得

(22)
同理可求得∂2u1(t)/∂hk∂sp,l,∂2u2(t)/∂hk∂sp,l。式(17)两边对hw求偏导,得

(23)
同理可求得∂2u1(t)/∂sp,l∂hk,∂2u2(t)/∂sp,l∂hk。式(17)两边对sw,r求偏导,得

(24)
同理可求得∂2u1(t)/∂si,l∂sj,r,∂2u2(t)/∂si,l∂sj,r。
3.3梯度表达式算法2
式(7)两边对ηi(i=1,2,…,8)求偏导,得

(25)
3.4二阶导数矩阵表达式算法2
式(25)两边对ηp(p=1,2,…,8)求偏导,得
(26)
4 在线修正参数的预测滤波PID控制
为加快PID参数收敛的速度,选取
(27)
式中:pi,λi为加权因子。参考文献[5,7]的可克服算法病态的直接极小化指标函数的自适应控制算法和文献[8]的Robbins-Monro算法,可得如下自适应预测滤波PID控制:

(28)
(29)

(30)

5 仿真研究
被控对象为
式中参数的形式为
θ11=0.5+0.25t/400,
θ21=0.25+0.15t/400,
θ22=0.2-0.15t/400,
系统的参考输入r1(t)=(-1)·^round(t/100),r2(t)=(-0.6)·^round(t/100)。输入的饱和限幅为U1max=0.6,U2max=0.4。
待估参数的初始参数略。
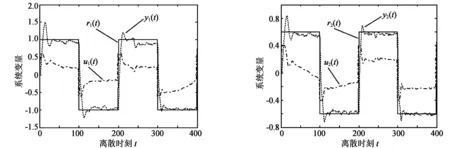
采用MATLAB7.01语言编程实现仿真研究,图1给出PID控制时系统的响应曲线,图2给出PID控制参数的在线修正曲线,限于篇幅只给出h1,s1,0的修正曲线。
由图1(a)、(b)可看出,采用无修正参数控制的响应曲线的控制品质差,其超调较大,调节时间较长,而且有振荡。由图1(c)、(d)可看出,在0≤t<200时,由于PID控制参数偏离其有效值,造成系统的控制品质不良,表现在系统响应的超调较大,调节时间较长;在200≤t≤400时,因PID控制参数已收敛到有效值,故系统具有良好的控制品质,表现在系统响应的超调较小,调节时间较短。由图2可看出,PID控制参数在系统动态时有修正,在系统稳态时无修正,符合算法的物理意义。
6 结 论
(1)给出确定性多变量NARMAX模型采用PID控制的约束条件;
(2)提出一个具有预测控制性能的多变量增量型预测滤波解耦PID控制算法;
(3)基于系统模型和增量型预测滤波PID控制算法,给出了系统输出﹑系统输入和系统输出预测值的关于PID控制参数的梯度表达式和二阶导数矩阵表达式;
(4)给出了确定性多变量NARMAX模型的在线修正参数的自适应预测滤波PID控制算法;
(5)因所提出算法的指标函数中含有控制输入的增量约束项,则提出的PID控制算法具有柔化控制量变化减少对系统执行机构冲击的性能;
(6)算法的BIBO稳定性和算法的收敛性有待研究,并将提出的PID控制算法推广到随机NARMAX模型上。
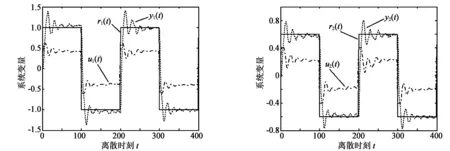
(a) 无修正的y1(t)响应曲线 (b) 无修正的y2(t)响应曲线
(c) 有修正的y1(t)响应曲线 (d) 有修正的y2(t)响应曲线图1 系统响应曲线
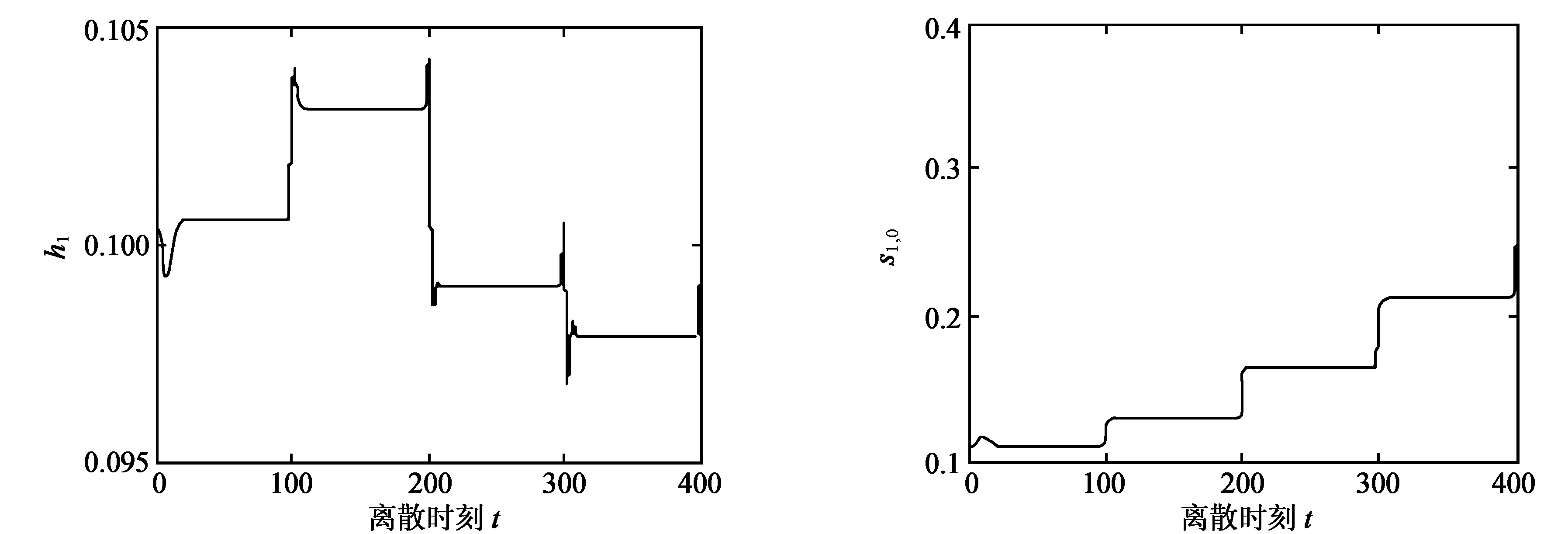
(a) 参数h1的修正曲线 (b) 参数s1,0的修正曲线图2 PID控制参数的修正曲线
[1]张燕红.PID控制器参数自整定方法综述[J].常州工学院学报,2008,21(4):49-53.
[2]任俊如.改进的预测PID控制器的研究与设计[D].武汉:武汉科技大学,2011:1-3.
[3]侯晓秋.直接极小化指标函数的自适应PID控制[J].黑龙江科技学院学报,2008,18(1):47-50.
[4]侯小秋.CARMAX模型的在线修正参数预测滤波PID控制[J].黑龙江科技大学学报,2015,25(6):686-691.
[5]侯小秋.多变量CARMAX模型的在线修正参数预测滤波PID控制[J].黑龙江科技大学学报,2016,26(1):68-74.
[6]侯晓秋.非线性随机系统具有遗忘因子的递推最小二乘法[J].黑龙江科技学院学报,2008,18(4):306-309.
[7]TRULSSON E,LJUNG L.Adaptive control based on explicit criterion minimization[J].Automatica,1985,21(4):385-399.
[8]萧德云.系统辨识理论及应用[M].北京:清华大学出版社,2014:189-192.
[责任编辑:谢 平]Prognosis-filtering PID control with on-line modifying parameter for a deterministic multivariable nonlinear system
[文章编号]1673-2944(2016)05-0035-08
HOU Xiao-qiu
(School of Electronics and Controlling Engineering, Heilongjiang University of Science and Technology,Harbin 150022, China)
The constraint conditions being applicable to the deterministic multivariable NARMAX model were analyzed. Based on the increment-type predictive-filtering control algorithm, the parameter estimation of the system model was conducted by using the recursive parameter estimation algorithm, and the prognosis was conducted by using step-by step iterative predictor algorithm. Combining the self-tuning control algorithm of direct minimization index function with solving ill-controlled and the Robbins-Monro algorithm, a prognosis-filtering PID control algorithm with the characterizations of on-line modifying parameter was developed for the deterministic multivariable NARMAX model. The algorithm exhibits a character of speeding the convergence of PID control parameter due to the index function containing the predicting values of the outputs. The simulation results indicate that the system exhibits very good controlling characterization due to the developed PID control algorithm with the properties of predicting-controlling and on-line modifying parameter.
adaptive control;predictive-control;PID control;parameter estimation;iterative prediction;deterministic multivariable NARMAX model
1673-2944(2016)05-0028-07
2016-05-28
2016-07-19
侯小秋(1965—),男,黑龙江省哈尔滨市人,黑龙江科技大学副教授,硕士,主要研究方向为非线性控制、预测控制、自适应控制。
TP273+.2
A
