基于半实物仿真的高精度永磁同步电机控制方案
2016-11-09孙玉良韩昌佩
孙玉良, 韩昌佩, 王 飞
(1.中国科学院大学,北京 100049;2.中国科学院 上海技术物理研究所,上海 200083;3.中国科学院 红外探测与成像技术重点实验室,上海 200083)
基于半实物仿真的高精度永磁同步电机控制方案
孙玉良1,2,3,韩昌佩2,3,王飞2,3
(1.中国科学院大学,北京100049;2.中国科学院 上海技术物理研究所,上海200083;3.中国科学院 红外探测与成像技术重点实验室,上海200083)
永磁同步电机凭借其转换效率高、调速范围宽等得到了广泛应用。在其控制方案的设计中,从影响系统控制精度的因素出发,采用了模型参考自适应控制方案,同时使用了编码器和感应同步器作为粗精通道,融合得到高精度的位置信息作为轴角反馈信息,通过使用MATLAB/Simulink建立离线数学模型,使用HiGale系统的软硬件环境,搭建了半物理仿真模型。试验结果表明,PID等参数一致时,离线模型与半实物模型仿真结果一致,同时达到了1″的稳态控制精度。
半实物仿真; 永磁同步电机; 模型参考自适应控制; 空间矢量脉宽调制
0 引 言
由于环境压力、能源紧张等因素的影响,使新能源电动汽车、动力机车等得到广泛普及。永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)以其简单的结构、较高的能量转换效率、高可靠性、宽调速范围等优点得到了广泛应用[1-3]。传统的PMSM等控制系统的开发方式一般是离线仿真、硬件设计、代码编写、系统集成与测试等。实际上,很多问题都是在系统集成的阶段才逐步凸现出来,当出现问题时,必须重新从头开始进行设计和实现,从而造成开发周期过长,开发难度加大[4-6]。因此必须在项目开发初期引入一个方便快捷的方法对控制策略进行验证,半实物仿真技术就是在这样的需求下应运而生的。
本文利用HiGale半实物仿真技术平台,对高精度PMSM伺服控制系统展开研究。针对系统要实现较高的控制精度,本设计采用了模型参考自适应控制与传统的PID控制相结合的控制算法,使用了高精度的感应同步器和编码器同时作为轴角传感器。利用空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)实现对PMSM的控制。建立了SVPWM的离线仿真模型和三环控制模型,使用HiGale编译器生成目标代码下载到半实物系统中,实现系统半实物仿真。本文在离线模型中充分考虑了实际物体和数字控制器,建立了数字模拟混合模型,其控制参数可以直接应用到半实物仿真中,达到了离线仿真系统和真实系统的PID等控制参数一致性,最终系统可以达到1″的稳态控制精度。
1 高精度PMSM控制方案设计
PMSM控制系统要实现较高的控制精度,需要从控制器算法、PMSM驱动控制方案和高精度轴角传感器入手。采用模型参考自适应控制算法,估计理论模型与实际系统之间的偏差,动态调节控制器PID参数,可以显著降低系统控制误差。使用SVPWM可以把PMSM复杂的电磁关系转化成直流电机控制形式,提高直流电压利用率,降低开关损耗[7-8]。轴角传感器的选型是实现高精度的关键,本文采用双轴角传感器的方式,使用720级相对式感应同步器经过信号处理得到数字量信号之后,与绝对式编码器进行数据融合,得到分辨率为24位的轴角反馈量。综合以上方面,分别进行论述并建立系统数学模型仿真、验证。
1.1模型参考自适应控制
自适应控制是20世纪中期发展起来的,针对系统中客观存在的不确定性,通过连续测量系统中的输入、状态、输出或者性能参数,了解掌握对象,按照一定的设计方法更新控制器的控制作用,使得控制效果达到最优。模型参考自适应控制是设计高性能控制系统常用的方法,由参考模型、被控对象、反馈控制器和调整控制参数的自适应机构等组成。
根据系统的速度环带宽远大于电流环带宽,可将电流环简化成一阶惯性环节,重点对位置环、速度环控制算法进行仿真。建立PMSM的位置环控制模型如图1所示。

图1 模型参考自适应控制框图
图1中将电流环简化成惯性环节,KT为电机转矩常数,取1.54N·m/A;J为电机及负载转动惯量,取1.0kg·m2。
速度环控制器采用的PI+控制结构框图如图2所示。
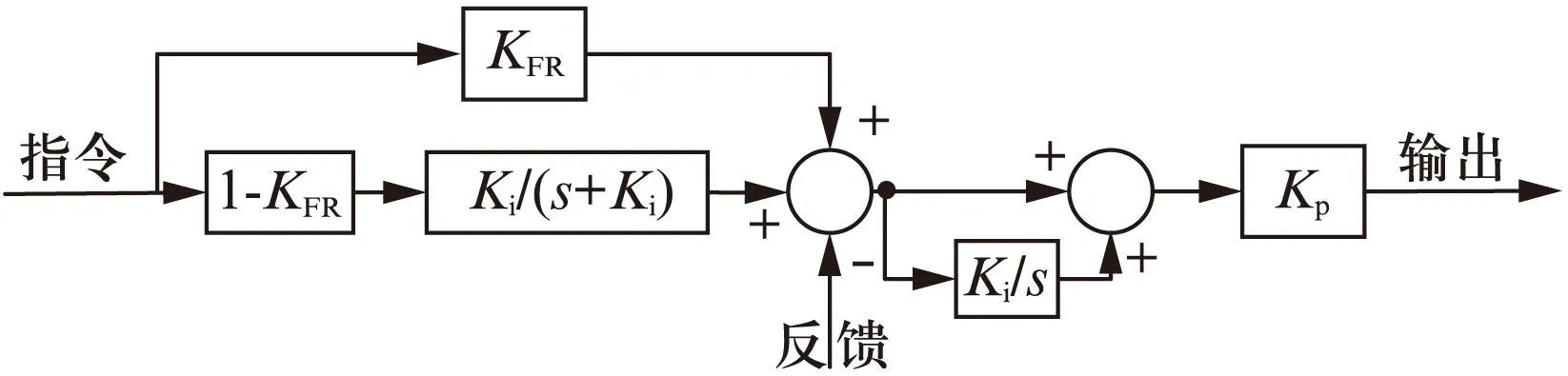
图2 PI+控制结构框图
在PID控制中,积分系数Ki为了避免超调会在量值上受到限制,而PI+本质上是用一个低通滤波器对指令信号进行滤波,以消除超调,因此积分增益可以取更高的值。
速度环闭环传递函数为
(1)
式中:Kp——速度环控制器比例增益;
KFR——速度环控制器前馈系数,在一般应用中常取0.65;
Ki——速度环控制器积分增益。
系统广义误差为e,被控对象未知或慢时变参数为θ,控制目标为调整控制器参数,使得e(∞)=0。引入性能指标函数为
(2)
为了使J取极小值,比较合理的做法是沿J的负梯度方向变更参数,即
(3)

r——调整率。
由式(1)得到位置环开环传递函数G(s),可以取参考模型为kmG(s),km为参考模型增益。
设输入为yr,输出为yp,参考模型输出为ym。根据系统指标要求,系统误差:
e(t)=yp(t)-yr(t)=
(4)
根据上述,系统灵敏度导数为
(5)
将式(5)代入式(3)得到可调增益自适应律为
(6)
所以得到系统的控制律为
u(t)=kc(t)yr(t)
(7)
根据前文所述,建立位置环模型进行仿真试验。由图3可以看出,加入模型参考自适应控制之后,系统在静态时的误差比使用PID控制器时小。这说明模型参考自适应控制方法可行,可以实现高精度控制。

图3 PID与模型参考自适应控制效果对比
1.2PMSM矢量控制
随着计算水平和人工智能的发展,PMSM的控制理论和实际控制方式上升到了一个新的高度。目前使用范围比较广的是矢量控制和直接转矩控制,其中包括正弦波驱动控制和无位置传感器控制。
图4所示为PMSM矢量控制伺服系统的原理框图。由图4可知,该系统是一个三环控制系统,从内到外依次为电流环、速度环、位置环。系统主要组成部分有被控对象PMSM、转子磁极位置检测计算模块、坐标转换模块、PI控制器、SVPWM模块、三相逆变器模块等。

图4 PMSM矢量控制系统框图
永磁体基波励磁磁场轴线为d轴(也称为直轴),基波转矩磁场轴线为q轴(也称为交轴,顺着旋转方向超前d轴90°电角度)。A-B-C坐标系是以PMSM三个绕组轴线为中线,依次相差120°的静止坐标系。α-β坐标系中α轴与A轴重合,β轴超前α轴90°。根据Park反变换和Clark反变换,将直流电机两相旋转d-q坐标系转换到PMSM三相定子静止坐标系。根据三相功率驱动电路中的6个IGBT导通关断来构建矢量表,如表1所示。
得到三相导通、关断与电磁旋转关系之后,根据秒伏平衡原理矢量合成,就可以根据三相开关时间来合成理想磁链圆。本设计中采用的是id=0的控制方式,驱动q轴电流产生电磁转矩。
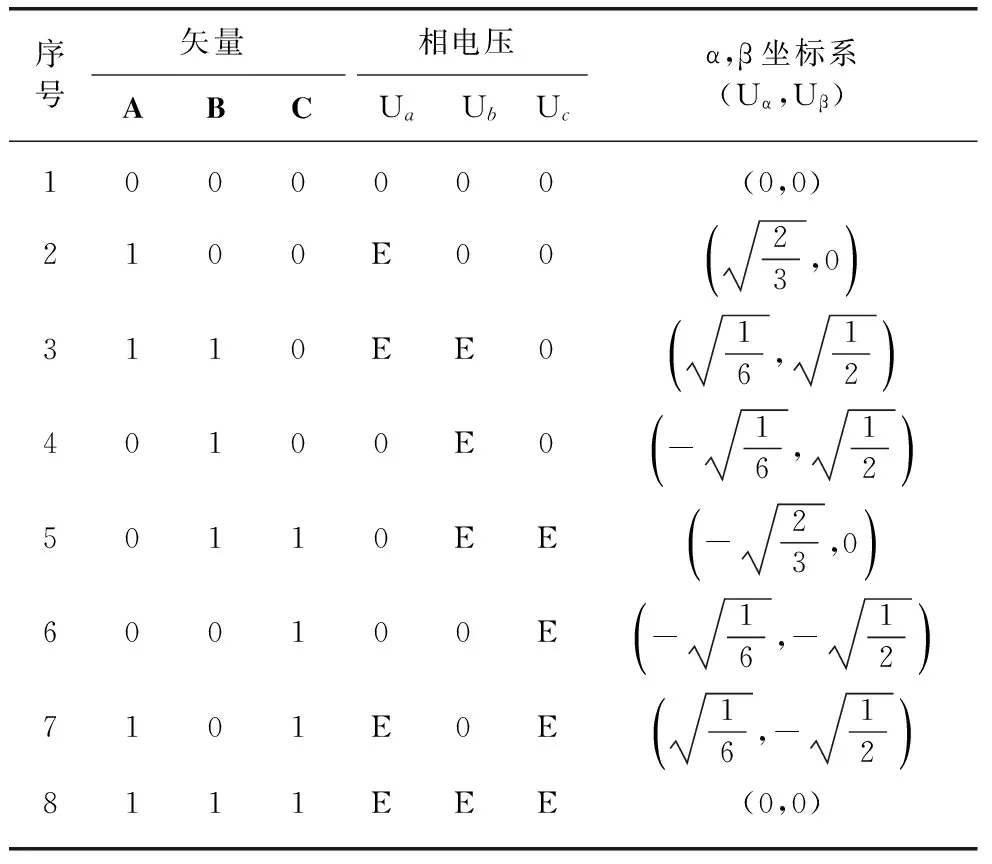
表1 开关矢量与两相静止坐标系
1.3高精度轴角传感器
在现有的工艺和控制技术水平上,要实现超高精度的控制,必须要提高系统的反馈精度。本设计中使用了绝对式编码器和相对式的感应同步器同时作为轴角传感器,使用信息融合技术得到高精度绝对式位置反馈量。轴角传感器安装对同轴度、间隙、平行度都有很高的要求,如图5所示。

图5 感应同步器和编码器安装示意图
本文采用数据融合方式,使用相对式的感应同步器作为精通道,使用绝对式编码器作为粗通道,两者数据融合(流程如图6所示)产生绝对式的轴角传感器数据。本文使用Xilinx的现场可编程门阵列(Field Programmable Gate Array, FPGA)完成数据采集、数据融合和输出的工作。

图6 数据融合流程示意图
1.4离线仿真模型
在忽略铁心饱和、不计涡流和磁滞损耗、无转子阻尼绕组、永磁体电导率为零、空间磁场呈正弦波分布的条件下,在d-q坐标系中,PMSM的电压方程和运动方程可以表示为
(8)
电机参数根据实际电机的参数进行设置。PMSM参数如表2所示。

表2 PMSM参数
根据前文所述原理,可建立PMSM矢量控制系统的离线仿真模型。模型由外向内包括位置环、速度环、电流环三环,最内环的电流环使用id=0 的矢量控制方法。在要求快速响应的应用中,可以对位置指令进行微分,获得速度前馈信息直接送入速度环,可以减小位置环相移并且消除静差。速度校正环节采用微分负反馈的PI型控制器,可以抑制乃至消除超调,提高了速度环的抗干扰性能。位置校正环节一般采用PID或者其变种形式。本设计中位置环采用模型参考自适应控制方式,通过参考模型输出与实际系统输出的对比,动态调整位置环控制器的参数。
由于实际系统中数字控制器的大量应用,使用离散模型更能与实际系统相吻合,所以三环分别采用不同的控制周期,电流环125μs,速度环1.25ms,位置环2.5ms。其目的是通过位置校正环节较窄的带宽保证足够的低频增益,从而提供较高的位置跟踪精度,内环则通过较高的带宽抑制外界引入的扰动。
2 半实物仿真
基于半实物的控制系统设计开发流程可以分成功能需求定义、快速控制原型(Rapid Control Prototype, RCP)功能测试、目标代码生成、半实物测试阶段即硬件在环(Hardware In Loop, HIL)仿真测试和系统标定。开发流程如图7所示。
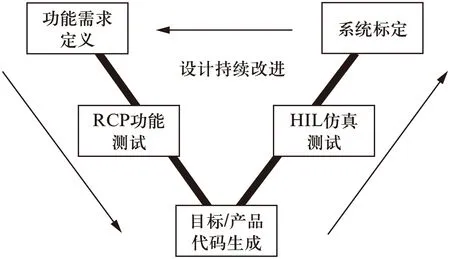
图7 半实物控制系统开发流程
2.1系统组成
图8为HiGale半实物仿真系统结构框图。该系统主要由三部分组成,分别为控制系统算法设计平台MATLAB/Simulink、HiGale实时仿真平台及外部实际控制对象。

图8 基于半实物仿真的PMSM控制系统框架
由图8可以看出: 主控计算机是整个仿真系统的上位机,通过Simulink、Stateflow、S-Function等手段来构建控制系统模型,进行数字仿真和控制参数优化,编译生成下载可执行的代码、运行实时监控测试软件等。HiGale实时仿真平台包括HiGale实时接口(Real-Time Interface, RTI)、HiGale实时硬件(Real-Time Hardware,RTH)和实时监控测试软件HiGaleView。RTI是连接HiGale实时仿真平台与主控计算机的纽带。RTI硬件部分包括一系列硬件板卡,如三相电流信息采集板卡、角度信息获取板卡、PWM信号输出板卡等,这些板卡获得的数据通过RTI与上位机Simulink环境相连。实际控制对象与仿真平台交互是通过A/D、D/A、RS- 422等输入输出接口实现的。
被控对象为椭圆形扫描镜,由铝铸造而成,并且在背部掏空实现轻量化,摆动范围机械限制为±20°。仿真机平台包括HiGale提供的仿真机箱以及自行设计的配套供电电路、电机驱动电路、电流放大滤波电路和位置信息处理电路。三相电流通过HiGale仿真平台硬件部分的A/D接口获得,PWM驱动信号通过驱动接口输出,位置信息由数据融合之后,通过仿真系统对应的硬件板卡进行采集。
2.2半实物仿真模型
在离线仿真模型的基础上,对PMSM控制系统的模型进行改造,建立可以半实物仿真的模型。使用真实系统中的PMSM及其驱动电路、轴角传感器、电流采样模块代替离线模型中相应的模块,算法结构跟离线仿真模型相同。借助HiGale提供的编译器可以方便地实现模型编译到代码下载,使用在线调试平台HiGaleView可以在线更改模型中的参数,并观测实际系统运行曲线等。
3 试验结果分析
相关参数设置完毕后,对离散模型进行仿真,首先断开速度环输出与电流环命令的连接,这样系统中只剩下电流环闭环。电流命令为周期2s、占空比50%的方波,使用相同的PID控制参数,数学模型和半实物仿真结果如图9所示。

图9 电流仿真图
把速度控制器接入控制回路中,得到半实物仿真的速度环仿真结果如图10所示。与数学模型比较,半实物仿真的静止时速度误差几乎为零,匀速段速度误差也近似为零,加减速段速度误差最大是2.5mrad/s,这个误差由Ⅰ型的系统对于Ⅱ型的速度指令是有差跟踪而产生的。半实物仿真跟随效果和误差量级与数学模型是一致的,但是在加减速阶段速度波动较明显,分析原因可能
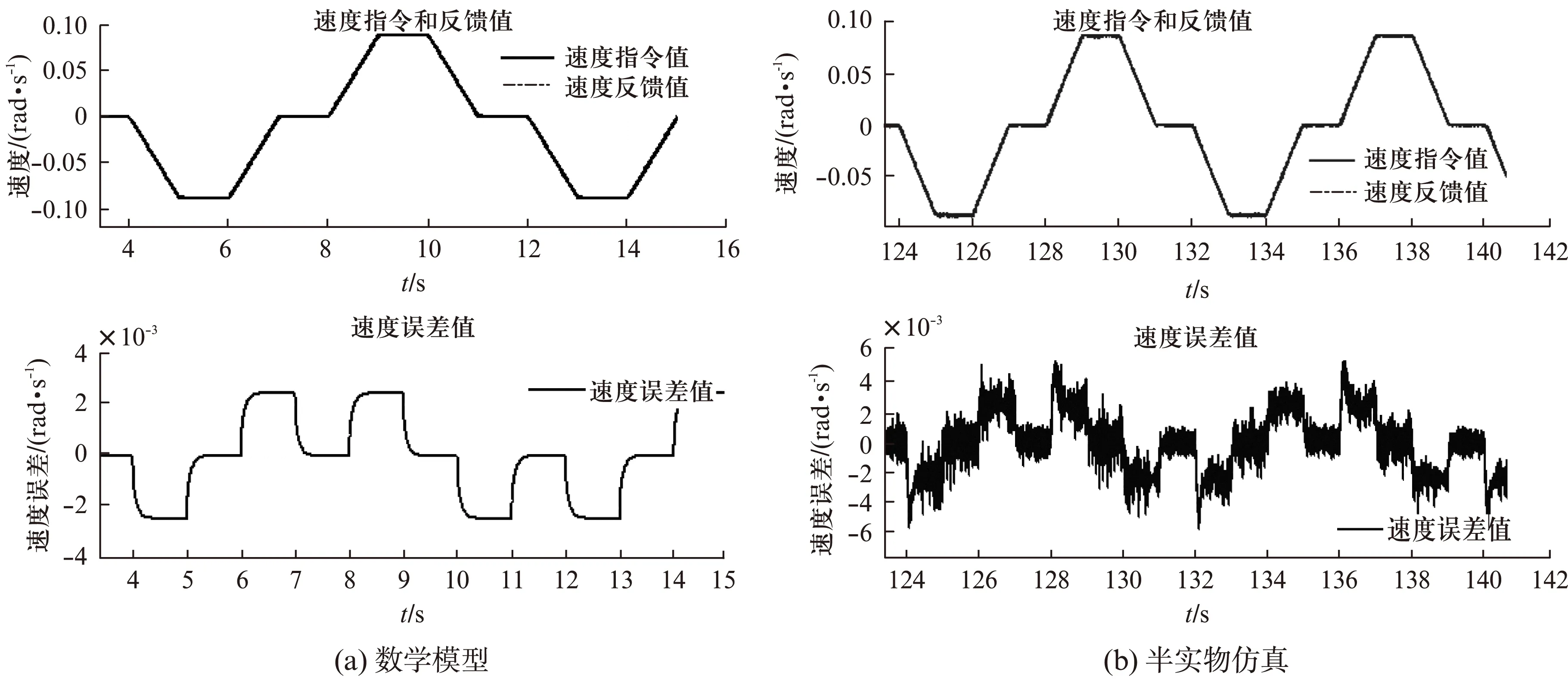
图10 速度环仿真结果
是转矩波动带来的速度波动。
位置环的命令根据实际项目需要设置为匀速段与“S”形的加减速段。离线模型仿真结果如图11所示,在加速、减速阶段,位置最大误差能到50,系统稳定时间约为0.05s。
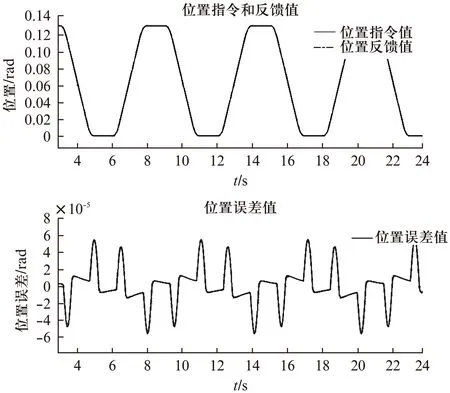
图11 数学模型位置环仿真结果
半实物仿真结果如图12所示,其跟随和误差与离线模型一致,稳定段控制精度达到1″,但是在匀速阶段有较大的波动,稳定端有低频的噪声,其应该是由实际系统中的外界环境、系统力矩波动、摩擦、噪声等因素所致。
4 结 语
本文使用模型参考自适应控制、矢量控制算

图12 半实物仿真位置环结果
法和高精度轴角传感器,并利用HiGale半实物仿真平台,对PMSM高精度伺服控制系统展开研究。建立了细化离线模型和半实物仿真平台并仿真验证,结果表明纯数学模型可以模拟实际的控制系统,也可以使用半实物模型进行后续的转矩、摩擦力、形变等误差因素研究。同时该方案最终位置指向定位精度高(1″)、响应迅速,可以满足高精度PMSM伺服系统的应用需求。
[1]任先进,余继良,王峰,等.永磁同步电机空间矢量脉宽调制系统仿真[J].电机与控制应用,2014,41(9): 7-11.
[2]吴恒,王淦泉,陈桂林.基于Simulink的PMSM控制器的建模与控制仿真[J].红外,2010,31(2): 29-34.[3]王艾盟,马德军,舒思婉.基于磁极偏移的新型永磁同步电机性能研究[J].电机与控制应用,2014,41(11): 33-36.
[4]潘峰,薛定宇,徐心和.基于dSPACE半实物仿真技术的伺服控制研究与应用[J].系统仿真学报,2004,16(5): 936-939.
[5]位正.新一代硬件在环仿真平台的研究和开发[D].北京: 清华大学,2009.
[6]黄苏融,李良威,高瑾,等.考虑空载损耗的IPMSM半实物实时仿真测试[J].电机与控制应用,2015,42(8): 1-6.
[7]刘军.永磁电动机控制系统若干问题的研究[D].上海: 华东理工大学,2010.
[8]肖春燕.电压空间矢量脉宽调制技术的研究及其实现[D].南昌: 南昌大学,2005.
High Precision Permanent Megnet Synchronous Motor Control System Based on Hardware-in-Loop Simulation
SUNYuliang1,2,3,HANChangpei2,3,WANGFei2,3
(1. University of Chinese Academy of Sciences, Beijing 100049, China;2. Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai 200083, China;3. Key Laboratory of Infrared Detection and Imaging Technology,Chinese Academy of Sciences, Shanghai 200083, China)
With its high conversion efficiency and wide speed range, permanent magnet synchronous motor was used widely. The factors that influenced the precision were analyzed in the design of its control system. The method of model reference adaptive control was applied. Encoder and inductosyn were used as the coarse channel and the fine channel, the high precision angel sensor was obtained through data fusion. System modeling based on MATLAB/Simulink and hardware-software environment provided by HiGale were presented to model a hardware-in-loop servo system. The result showed that the mathematical model performed as same as the HILS with the same PID parameters and reached up one second for the precision of the angle.
hardware-in-loop simulation(HILS); permanent magnet synchronous motor(PMSM); model reference adaptive control; space vector pulse width modulation(SVPWM)
孙玉良(1990—),男,硕士研究生在读,研究方向为高精度电机控制。
韩昌佩(1979—),男,博士研究生,研究员,研究方向为遥感仪器。
TM 301.2∶TM 351
A
1673-6540(2016)09- 0031- 07
2016-01-15
王飞(1988—),男,硕士研究生,工程师,研究方向为感应同步器信号读取。