基于空间矢量调制的永磁同步电机无磁链环直接转矩控制方法研究
2016-11-09龙觉敏赵朝会
龙觉敏, 孙 强, 赵朝会
(1. 上海科梁信息工程股份有限公司,上海 200233;2. 上海电机学院 电气学院,上海 200240)
基于空间矢量调制的永磁同步电机无磁链环直接转矩控制方法研究
龙觉敏1,孙强2,赵朝会2
(1. 上海科梁信息工程股份有限公司,上海200233;2. 上海电机学院 电气学院,上海200240)
针对传统无磁链环直接转矩控制精度不高、实现复杂的问题,依据永磁同步电机电磁转矩的形成原理,借助MATLAB/Simulink仿真工具,研究了一种基于空间矢量调制的永磁同步电机无磁链环直接转矩控制方法。该方法根据转矩误差和定子磁链限幅需要直接得到参考空间电压矢量,实现转矩轨迹精确跟踪给定,结构简单。仿真结果表明,引入空间矢量调制后电机定子磁链自适应变化效果更好,具有更高的功率因数,并有效降低了转矩脉动。
永磁同步电机; 直接转矩控制; 空间矢量调制; 无磁链环
0 引 言
永磁同步电动机(Permanent Magnet Synchronous Motor, PMSM)的直接转矩控制(Direct Torque Control, DTC)方法将电机与逆变器看作一个整体,直接以转矩作为控制对象,结构简单,具有良好的动态性能,但同时也存在着转矩脉动大的问题[1-9],对DTC的应用与发展造成了极大阻碍。针对这一问题,国内外研究人员做了许多工作。文献[10]将零矢量引入转矩调节器,通过零矢量对转矩的保持作用来降低转矩脉动。文献[11-12]分析了传统六扇区DTC中电压矢量对磁链和转矩的作用过程,重新划分扇区制作了空间电压矢量选择表,有效降低了转矩脉动。文献[13]根据电机给定转矩与实际转矩之间的差值,结合电机转矩模型计算出控制周期内非零矢量应作用的时间,其余时间选择零矢量达到消除转矩误差、降低转矩脉动的目的。文献[14-17]将空间电压矢量调制技术(Space Vector Modulation, SVM)引入直接转矩控制中,显著降低了磁链和转矩脉动。上述研究工作遵循的都是文献[1]中的传统PMSM的DTC思想: 保持定子磁链幅值恒定,控制转矩角来实现对电机转矩的有效控制。文献[18]则提出了一种新的PMSM最优DTC方法,是将定子磁链幅值与转矩角两个变量通过数学变换,集中到定子磁链交轴分量这一个变量上,不再控制定子磁链幅值恒定,不仅保留了DTC动态响应快的优点,而且具有更低的转矩脉动与更高的功率因数。文献[19]将这一无磁链环DTC理论推广到无刷直流电机上,并验证了理论的正确性与可行性。但是,文献[18]提出的新型DTC方案仍采用乒乓控制策略,控制精度不高,其定子磁链限幅策略需要同时检测定子磁链与转子磁链的位置,在两套电压矢量选择表之间频繁切换,系统复杂性较高,存在改善的空间。为便于后续分析和介绍,将文献[18]提出的新型DTC控制方法称为传统无磁链环DTC。
本文在传统无磁链环DTC的基础上,深入分析PMSM电磁转矩与电压矢量交直轴分量之间的关系,对一种结合SVM的PMSM无磁链环DTC方法进行了研究。该方法根据转矩误差与磁链限幅需要直接求取参考电压矢量,实现转矩轨迹精确跟随给定。仿真结果表明,基于SVM的新型无磁链环DTC方法的定子磁链幅值自适应变化效果更好、功率因数更高,并且在保持优异动态响应特点的同时有效地降低了转矩脉动。
1 基于SVM的PMSM无磁链环DTC方法
1.1无磁链环DTC基本原理
对于PMSM,一般采用图1所示的坐标系进行分析。图1中,α-β为两相静止坐标系,d-q为转子同步旋转坐标系,x-y为定子磁链同步旋转坐标系,ψs为定子磁链矢量,其相对于α轴角度为θs,ψr为转子永磁体磁链矢量,其相对于α轴角度为θr,定转子磁链之间的夹角为δ,即转矩角。
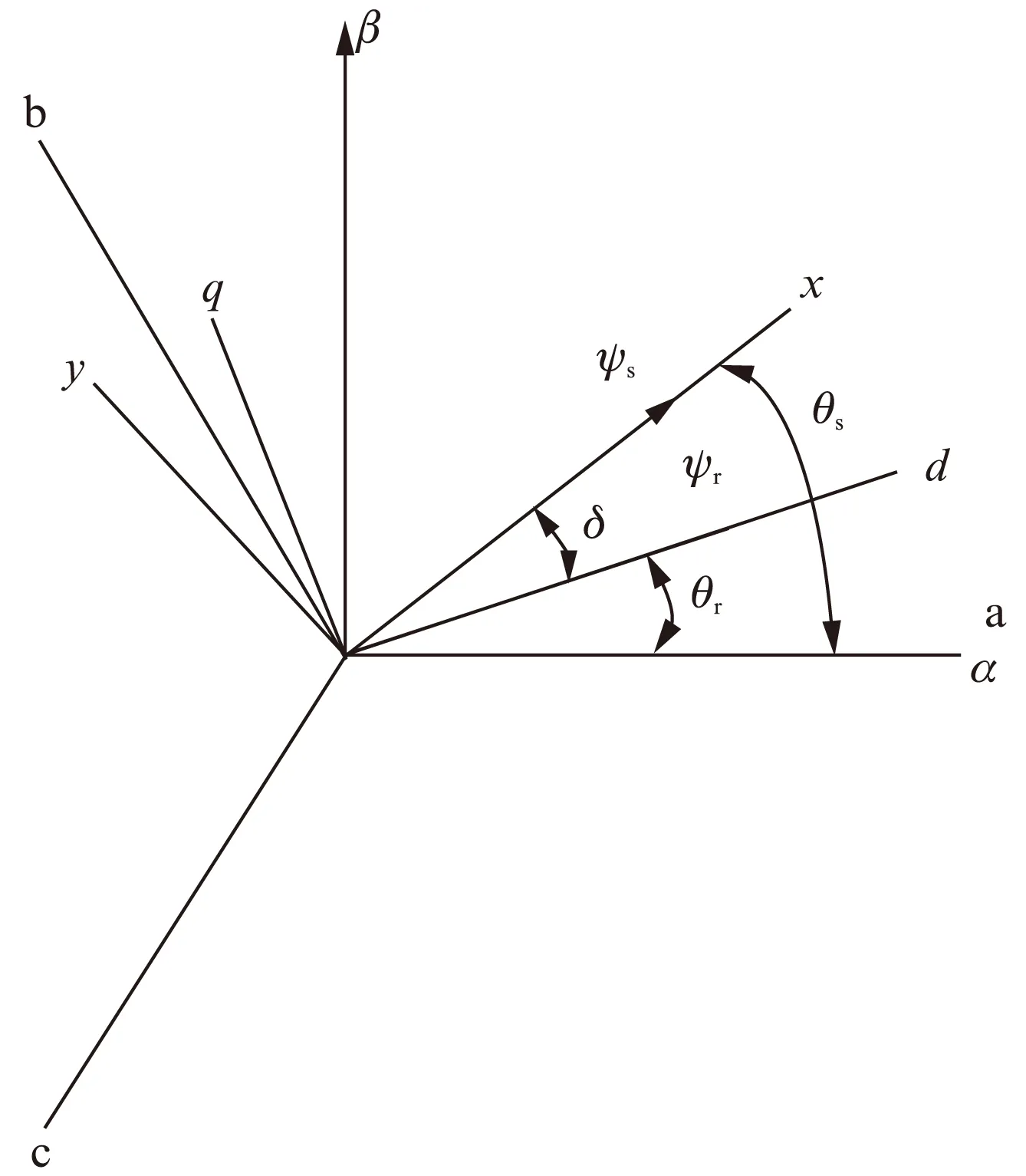
图1 不同坐标系之间的关系
隐极式PMSM转子磁链即永磁体磁链,其电磁转矩[20]为
(1)
式中:Te——电机电磁转矩;
Ls——定子绕组直交轴电感;
p——电机极对数;
ψf——永磁体磁链。
在d-q坐标系中将定子磁链ψs分解成直轴分量和交轴分量,可得定子磁链交轴分量为
(2)
将式(2)代入式(1),可得
(3)
对式(3)左右两边求微分可得
(4)
由式(4)可知,对电机转矩的有效控制也就是对定子磁链交轴分量的有效控制。
PMSM中空间电压矢量与定子磁链矢量之间的关系为
(5)
式中:us——电压矢量;
Rs——定子电阻;
is——定子电流矢量。
在忽略定子电阻压降的情况下,将式(5)在d-q坐标系下分解:
(6)
式中: usd、usq——电压矢量的直、交轴分量。
将式(6)代入式(4),得
(7)
由式(3)和式(7)可知,隐极式PMSM的转矩只与定子磁链交轴分量ψsq有关,而定子磁链交轴分量的变化又由电压矢量交轴分量usq决定。在转矩控制过程中,选择具有合适交轴分量的电压矢量即可有效控制电机转矩的变化。
1.2无磁链环DTC定子磁链幅值对电机功率因数的影响分析
在忽略定子电阻的情况下,理想PMSM的电压平衡方程为
u=es+jisdxd+jisqxq
(8)
式中:xd、xq——电机的直、交轴电抗;
es——转子磁动势在定子绕组产生的感应电动势。
PMSM对应的相量图如图2所示。由图2可知,功率因数角φ、转矩角δ及内功率因数角φ之间存在如下关系:
φ=φ+δ
(9)
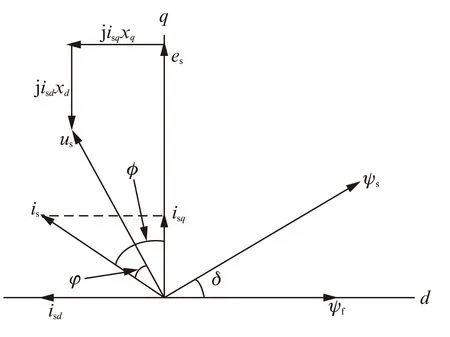
图2 PMSM相量图
同理,由图2中定子电流交直轴分量之间的关系可得内功率因数角φ为
(10)
由式(1)可求得转矩角:
(11)
综合式(9)、式(10)和式(11)可求得功率因数角φ:
φ=φ-δ=
(12)
其中,定子磁链幅值为

(13)

对功率因数角求余弦即可求得电机的功率因数,功率因数角越小,电机的功率因数就越高。结合式(12)与上述分析可知,当负载转矩一定时,无磁链环DTC系统的定子磁链幅值越小,电机的无功励磁电流即定子电流直轴分量isd也越小,功率因数角φ就越逼近0,从而电机的功率因数越接近1。
1.3参考电压矢量的生成
将SVM技术应用于DTC的关键是求出理想的参考电压矢量。某时刻定子磁链与电压矢量关系如图3所示。图3中:ψsq为电压矢量交轴分量作用下的定子磁链,Δψsx为电压矢量交轴分量作
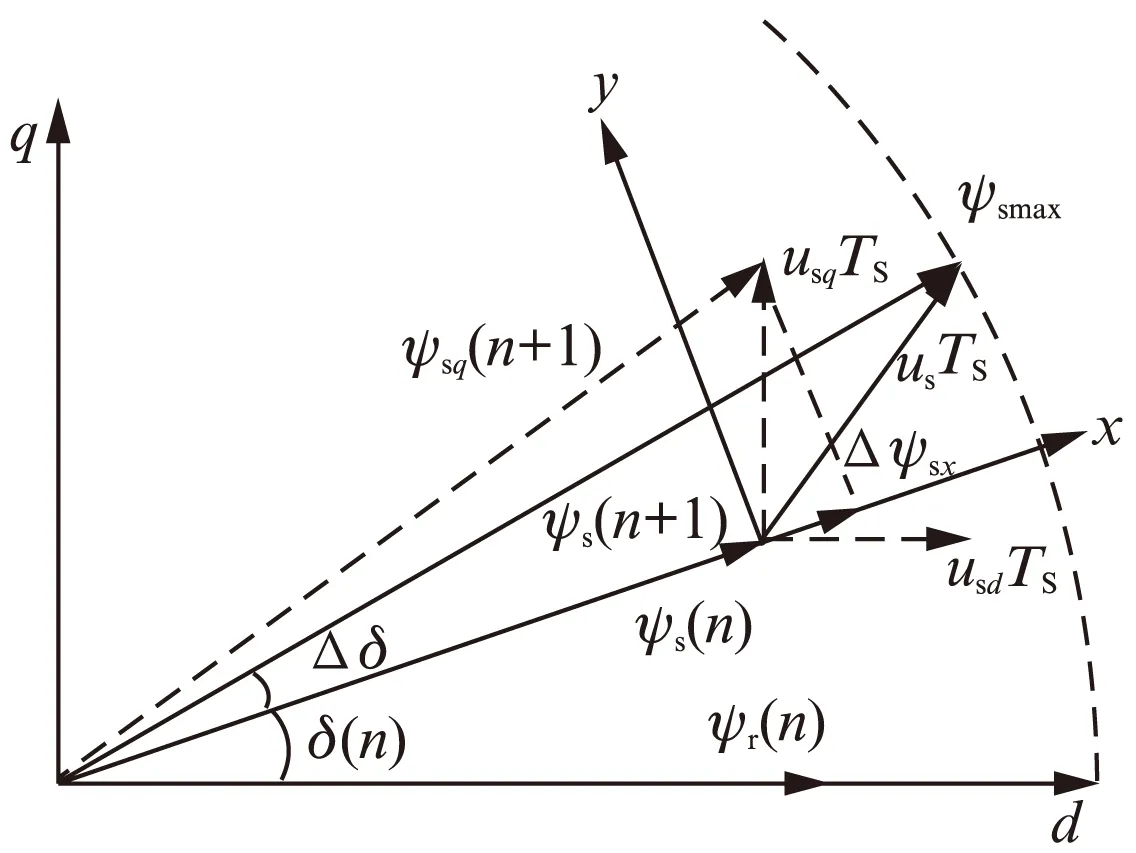
图3 定子磁链与电压矢量关系
用下定子磁链在x轴上的变化量,ψsmax为定子磁链额定值,usd为电压矢量直轴分量,Δδ为转矩角变化量。
传统的SVM-DTC中定子磁链幅值恒定,只需计算出满转矩角变化量Δδ,即可求出参考电压矢量,而无磁链环DTC定子磁链幅值不再保持恒定,需要寻找新的方法。
由式(6)可知,电压矢量直轴分量usd的变化会引起定子磁链直轴分量ψsd的变化: 当usd为负时,ψsd减小,有去磁作用;当usd为正时,ψsd增大。根据前文分析,此时定子磁链幅值增大,电机功率因数降低。因此,想要提高电机功率因数,应结合控制谨慎使用usd。
式(7)离散化后可得单个周期内转矩的变化量为
(14)
式中:Ts——采样周期。
由式(14)变形可得

由图3可知电压矢量交轴分量引起的定子磁链幅值变化量为
Δψsxq=usqTssinδ(n)
(16)
由电压矢量交轴分量单独作用时的定子磁链幅值为
交轴分量usq作用下,定子磁链超出额定值部分为
Δψsxd=ψsq(n+1)-ψsmax
(18)
由电压矢量与磁链的关系可求得电压矢量直轴分量为
(19)

由SVM的基本原理可知,当逆变器的直流母线电压为Ud时,输出电压矢量的最大幅值[20]为
(20)
结合式(14)与式(20)可得,单个周期转矩的限幅值为
(21)
综上所述,参考电压矢量为
(22)
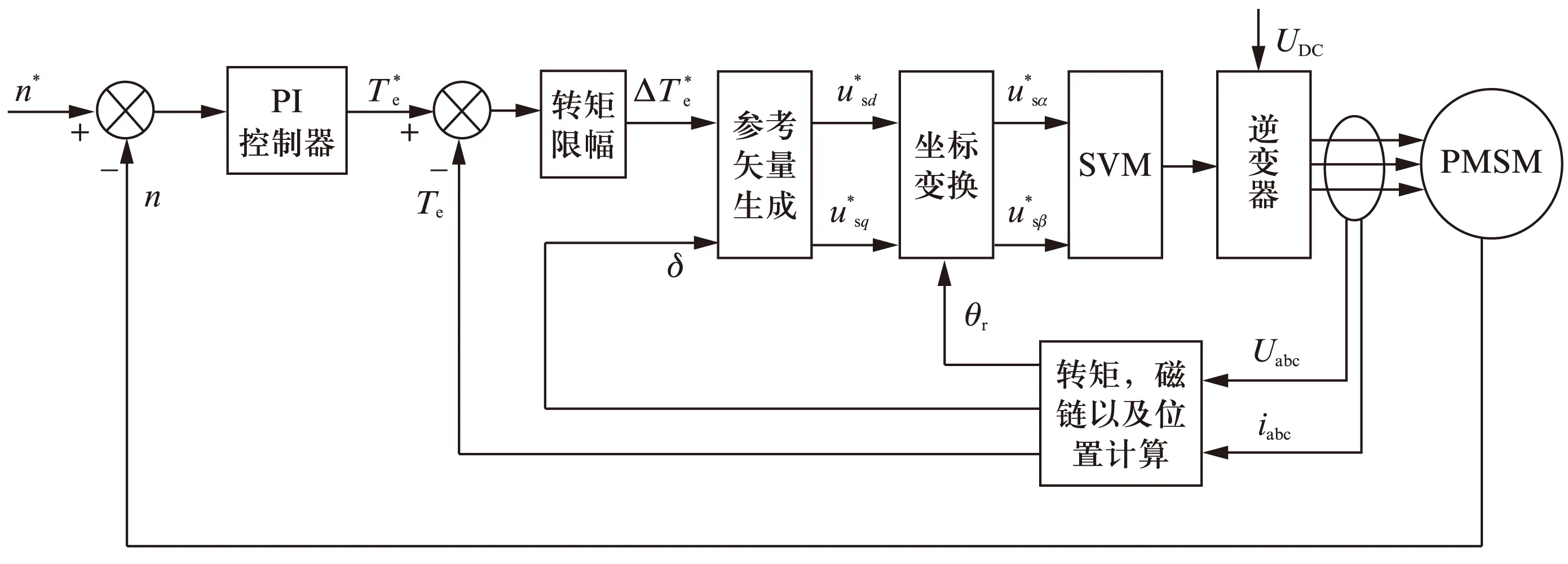
图4 基于SVM的PMSM无磁链环DTC结构框图
2 仿真研究
利用MATLAB/Simulink软件对系统进行了建模仿真研究。仿真所用的PMSM永磁体磁链为0.1717Wb,定子电感为26.82mH,定子电阻为18.7Ω,极对数为2,转动惯量为2.26×10-5kg·m2,额定转速为1500r/min。仿真中给定定子磁链限幅值为0.18Wb,控制周期为10μs。
PMSM的无磁链环DTC与传统DTC的显著区别在于磁链轨迹不再保持圆形,而是根据转矩需要自适应调节,定子磁链幅值相比传统DTC减小,从而所需的无功励磁电流也减小,提高了电机的功率因数。为比较研究结合SVM的新型无磁链环DTC方案与传统无磁链环DTC方案之间的区别,当电动机在额定转速1500r/min条件下运行时,分别采用两种方案在不同负载转矩下进行仿真,定子磁链轨迹如图5所示。从图5可知,两种方案中定子磁链轨迹都能随负载转矩的改变自适应变化。由于传统无磁链环DTC方案中使用的是6个基本非零电压矢量,空载时电机转矩较小,因此定子磁链轨迹呈六边形,随着负载转矩增加,定子磁链轨迹逐渐向外扩,慢慢逼近以额定定子磁链为半径的圆形。新型无磁链环DTC采用的SVM技术可以根据实际需要精确合成目标电压矢量,不再局限于6个基本非零空间电压矢量,因此空载时定子磁链也不再是六边形,但仍然保持了随负载转矩增大逐渐向外扩张的趋势。新型无磁链环DTC方案的定子幅值始终没有超过定子磁链限幅值,说明采取的限幅策略是有效的,并且其定子磁链幅值比传统无磁链环DTC要小得多,意味着功率因数得到了进一步提高。
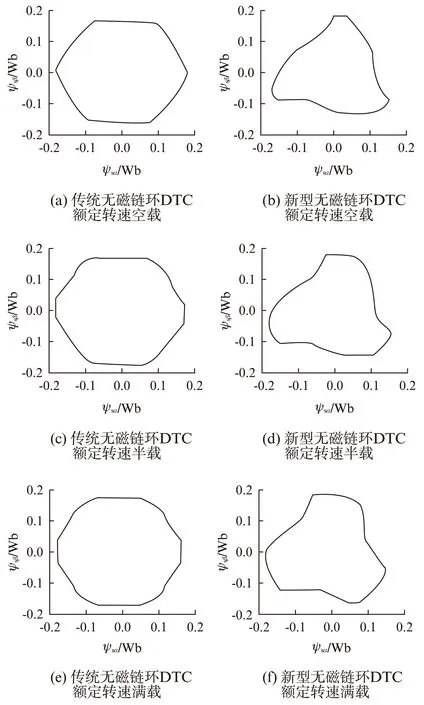
图5 采用不同方案时,不同负载转矩下定子磁链轨迹
图6是电机额定转矩负载下不同转速时的的稳态转矩波形。为便于更直观地比较,将两种控制方法的转矩脉动情况进行了整理,如表1所示。

图6 采用不同控制方法不同转速下转矩波形
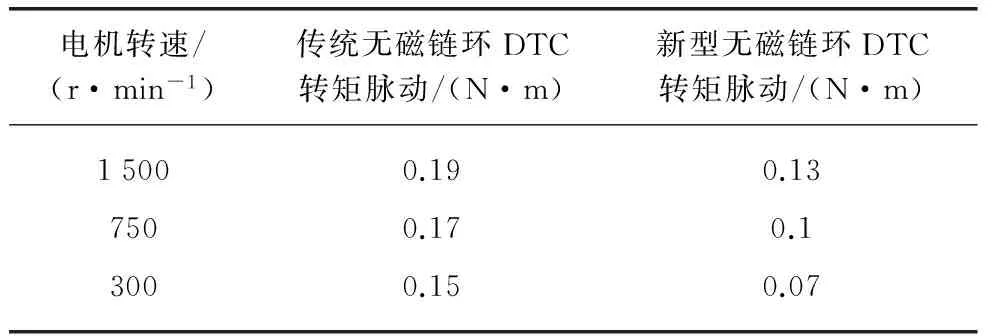
电机转速/(r·min-1)传统无磁链环DTC转矩脉动/(N·m)新型无磁链环DTC转矩脉动/(N·m)15000.190.137500.170.13000.150.07
结合图6与表1,对比两种无磁链环DTC控制方法的转矩波形与脉动可知: 带额定负载运行时,不同转速下新型无磁链环DTC控制方法的转矩脉动均要小于传统无磁链环DTC方法,这主要是由于传统方法中使用乒乓控制来控制转矩,而乒乓控制只确定转矩应该增加还是减少,增加和减少的量由8个基本空间电压矢量决定,无法准确达到给定转矩。新型无磁链环DTC则通过精确计算求得转矩跟随给定需要的空间电压矢量,再由8个基本空间电压矢量调制合成,比传统方案精度更高,能更准确地控制转矩,达到了更好地抑制转矩脉动的效果。
为比较两种方法的动态性能,在0.1s突加给定转矩0.8N·m时,两种控制方法下的转矩响应如图7所示。由图7可知: 两种方法的转矩
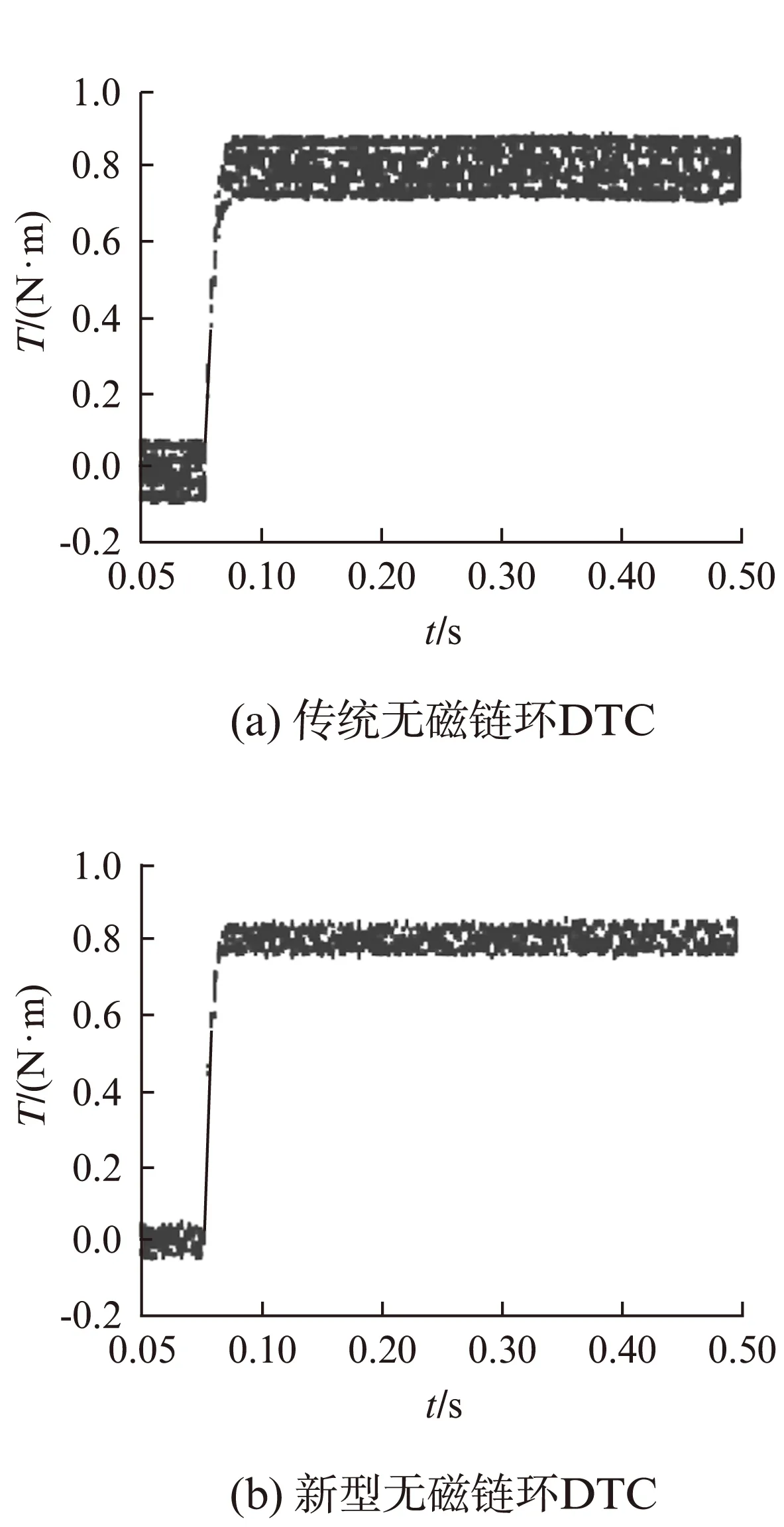
图7 采用不同控制方法动态转矩响应
动态响应时间均约为0.01s,并且新型无磁链环DTC在到达给定转矩后,转矩脉动要小于传统无磁链环DTC,与前面得到的结论相吻合。
3 结 语
本文研究了一种结合SVM的新型无磁链环DTC方法,该方法利用电动机转矩给定值与反馈值之间的误差,结合磁链限幅的要求,精确计算参考电压矢量的交直轴分量,并采用SVM的方法合成目标电压矢量控制逆变器运行。仿真结果表明: 与传统无磁链环DTC方法相比,基于SVM的无磁链环DTC方法,定子磁链幅值自适应变化效果更好,励磁电流更小,提高了电机的功率因数,并且在保持DTC动态响应快的同时,有效降低了转矩脉动。
[1]ZHONG L, RAHMAN M F, HU Y W, et al. Analysis of direct torque control in permanent magnet synchronous motor drives[J]. IEEE Transaction on Power Electronics, 1997,12(3): 528-535.
[2]PREINDL M, BOLOGNANI S. Model predictive direct torque control with finite control set for PMSM drive systems[J]. IEEE Transactions on Industrial Informatics, 2013,9(2): 648-657.
[3]邱鑫,黄文新,杨建飞,等.一种基于转矩角的永磁同步电机直接转矩控制[J].电工技术学报,2013,28(3): 56-62.
[4]LEE H D, KANG S J. Efficiency-optimized direct torque control of synchronous reluctance motor using feedback linearization[J]. IEEE Transactions on industrial electronics, 1999,46(1): 192-198.
[5]杨建飞,胡育文.永磁同步电机直接转矩控制转矩调节设计[J].中国电机工程学报,2011,3(19): 76-81.
[6]ZHONG L, RAHMAN M F, HU Y W, et al. A direct torque controller for permanent magnet synchronous motor drives[J]. IEEE Transactions on Energy Conversion,1999,14(3): 637-642.
[7]孙丹,贺益康.基于恒定开关频率空间矢量调制的永磁同步电机直接转矩控制[J].中国电机工程学报,2005,25(12): 112-116.
[8]窦汝振,温旭辉.永磁同步电动机直接转矩控制的弱磁运行分析[J].中国电机工程学报,2005,25(12): 117-121.
[9]高靖凯,林荣文,张润波.永磁同步电机直接转矩控制的研究及算法改进[J].电机与控制应用,2015,42(11): 16-20.
[10]HU Y W, TIAN C, GU Y K, et al. In-depth research on direct torque control of permanent magnet synchronous motor[C]∥28th Annual Conference of the IEEE Industrial Electronics Society, Sevilla: IEEE Industrial Electronics Society, 2002: 1060-1065.
[11]廖晓钟,邵立伟.直接转矩控制的十二区段控制方法[J].中国电机工程学报,2006,26(6): 167-173.
[12]徐艳平,钟彦儒.扇区细分和占空比控制相结合的永磁同步电机直接转矩控制[J].中国电机工程学报,2009,29(3): 102-108.
[13]VANJA A, GIUSEPPE S B. Band-constrained technique for direct torque control of induction motor[J]. IEEE Transactions on industrial electronics, 2004,51(4): 776-784.
[14]HABETLER T G, PROFUMO F, PASTORELLI M, et al. Direct torque control of induction machines using space vector modulation[J]. Industry Applications, IEEE Transactions on, 1992,28(5): 1045-1053.
[15]FOO G, GOON C S, RAHMAN M F. Analysis and design of the SVM direct torque and flux control scheme for IPM synchronous motors[C]∥The 12th International Conference on Electrical Machines and Systems, 2009: 1430-1436.
[16]TANG L X, ZHONG L M. A novel Direct torque control for interior permanent magnet synchronous machine drive with low ripple in toque and flux[J]. IEEE Transaction on Industry Applications, 2003,39(6): 1748-1756.
[17]田蕉.永磁同步电机SVM-DTC控制策略研究[D].南京: 南京航空航天大学,2004.
[18]杨建飞,胡育文.永磁同步电机最优直接转矩控制[J].中国电机工程学报,2011,31(27): 109-115.
[19]杨建飞,胡育文.无刷直流电机无磁链观测直接转矩控制[J].中国电机工程学报,2011,31(12): 90-95.
[20]杨建飞.永磁同步电机直接转矩控制系统若干关键问题研究[D].南京: 南京航空航天大学,2011.
[21]熊健,康勇,张凯,等.电压空间矢量调制与常规SPWM的比较研究[J].电力电子技术,1999(1): 25-28.
Research on Direct Torque Control Method Based Space Vector Modulation of Permanent Magnet Synchronous Motor without Flux Linkage Loop
LONGJuemin1,SUNQiang2,ZHAOChaohui2
(1. Shanghai Keliang Information Technology & Engineering Co., Ltd., Shanghai 200233, China;2. School of Electrical Engineering, Shanghai Dianji University, Shanghai 200240, China)
The control precision of torque is not high and the realization method is complex when using traditional direct torque control method without flux linkage loop on permanent synchronous motor. A direct torque control method based space vector modulation(SVM) of permanent synchronous motors without flux linkage loop was presented with the help of MATLAB/Simulink. The reference voltage space-vector was determined according to the error of torque combined with the amplitude limiting requirement of stator flux linkage. The stator flux linkage could track the specified value accurately. The structure of new control method was simple. The simulation verified that the introducing of space vector modulation could reduce the torque ripple effectively and retain the excellent dynamic performance. Besides, the effect of stator flux adaptive change was better and the power factor of motor was higher.
permanent magnet synchronous motor; direct torque control(DTC); space vector modulation(SVM); no flux linkage loop
龙觉敏(1988—),男,硕士研究生,研究方向为永磁同步电机驱动与控制。
孙强(1990—),男,硕士研究生,研究方向为永磁同步电机驱动与控制。
TM 351
A
1673-6540(2016)09- 0044- 07
2016-03-13
赵朝会(1963—),男,博士研究生,教授,硕士生导师,专业方向为电力电子及电力传动。