基于工业机器人的电热水器倒机自动化系统的设计与研究
2016-11-03王玉闯刘德平马龙杰
王玉闯,刘德平,马龙杰
(郑州大学 机械工程学院,郑州 450001)
基于工业机器人的电热水器倒机自动化系统的设计与研究
王玉闯,刘德平,马龙杰
(郑州大学 机械工程学院,郑州450001)
在某电热水器的组装车间内,电热水器的倒机自动化程度很低。针对这一实际问题,文章结合工业机器人的特点,提出了应用一台工业机器人在两条生产线之间进行电热水器倒机的方案,并设计了一套电热水器倒机自动化系统。该系统以PLC为主控制器,协调工业机器人、两条生产线以及底壳供料机之间的动作,从而代替人工完成倒机工作。该系统已经在某电热水器组装车间得到应用,减少了企业的人工成本,提高了企业生产车间自动化程度和生产效率,并且产品的稳定性也得到了大幅提高。
工业机器人;电热水器;倒机;自动化系统
WANG Yu-chuang, LIU De-ping, MA Long-jie
(School of Mechanical Engineering, Zhengzhou University, Zhengzhou 450001,China)
0 引言
某电热水器生产车间的倒机工作是由人工进行,人工完成放底壳并把前面流水线生产出来的半成品热水器抱起反转180°放于另一条生产流水线上。近些年来,机器人技术研究和应用取得了突出的进展,也已经应用于汽车工业、物流、码垛、食品和药品等领域,工业机器人正在逐步取代人工从事繁重的工作。因此基于KUKA关节机器人在电热水器组装过程中倒机系统的设计,会在很大程度上提高工厂的自动化水平,提高生产效率,减轻了繁重的体力劳动,并且该自动化系统已经在某电热水器生产车间正常使用。
1 电热水器倒机方案
目前,电热水器的生产组装大部分处于人工作业的状态,在流水线组装的某热水器生产车间,每个工人只能完成一个工位,组装一台热水器需要大量的人工,而且许多工位劳动强度比较大。由于工人工作时还具有一定的不确定性,产品的生产效率和质量得不到严格的控制,降低了生产效率,且废品率也不能控制。并且随着人工成本的增加和工人缺失,企业在招工方面变得越来越困难。随着企业间的竞争日趋激烈,用工成本的增加和生产效率的不均匀,也会导致企业在竞争中处于不利地位,因此生产车间的自动化水平的提高已经变得日趋重要。
由于工业机器人有着高度的准确性、可靠性和重复性,因此利用工业机器人来代替人工作业,不仅可以提高产品质量和生产效率,而且能有效降低次品率。机器人可以连续工作,比起人来说,机器人可以不用休息,连续作业。而且不受人为因素的影响,不像人一样容易受情绪的影响。此外,机器人具有可编程功能和工作多样性的特点,因而能适应需求多变的市场[4]。基于以上的考虑,采用工业机器人来对生产线进行衔接的方案。
2 总体设计
工业机器人的倒机系统是采用一台机器人来衔接两条生产线从而完成半成品的特定工序的搬运工作。该系统主要由工业机器人、可编程控制器、人机界面、两条自动化流水线、供料机等设备组成。该系统以PLC为控制系统的核心,通过PLC实现链接与通讯并实现所有设备集中管理,从而实现机器人完成特定的工序。
2.1系统方案布置
系统主要由工业机器人、生产线1、生产线2、供料机、防护栏组成。根据车间场地空间位置,两条流水线在一条线上,而机器人在两条流水线对接的位置,负责生产线1和生产线2之间的半成品倒机工作,供料设备及所有设备方案布置如图1所示。

图1 系统布局
2.2电气控制
整个系统有两条生产线,一台工业机器人和一台底壳供料机组成,各设备间的协同运转及循环动作有控制系统来完成,同时控制系统会根据各设备间的动作关系来安排协调各设备的下一步动作,控制系统的起动停止等。
此系统以PLC作为中央控制系统,接收并处理生产线、工业机器人、底壳供料机发送的信号,控制各设备间的动作协调,并告诉各设备下一步的动作,以便各设备间协同完成整个倒机任务。PLC接有人机交互界面触摸屏,工人可以通过触摸屏来观察并了解该系统的工作状态,控制系统的启动和停止等。PLC通过I/O接口与设备间进行交互通讯,下图2为控制系统结构示意图。
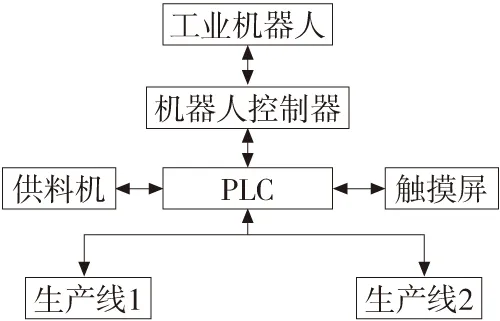
图2 控制系统结构示意图
2.3系统工作流程
电热水器的内胆在生产线1上组装成半成品,在最后通过导正机构,使得电热水器的壁挂正对着机器人一侧,之后通过行程开关、阻挡气缸等检测电热水器的位置并定位。到位以后,感应器感应到信号,并通过PLC把可抓信号发给机器人,机器人动作,由末端执行器抓去内胆(抓取热水器上的壁挂),提起后,下一个电热水器再次流入此位置等待机器人抓取。内胆被机器人提起后,由机器人动作把电热水器翻转180°后放到生产线2上的底壳内,在放之前机器人会接收到生产线2上感应器的可放信号,否则机器人不予放置。底壳由底壳供料机把底壳自动供给到生产线2的指定位置,并固定,以待机器人把电热水器放在底壳上,之后流走。流走后底壳继续供给生产线2,以备机器人下次抓取热水器时使用。如此循环动作以实现该工序的自动化操作。

图3 倒机系统工作流程图
整个系统正常工作过程中完全自动化,可实现长时间的无人化操作。图3为电热水器倒机自动化系统的工作流程图,生产线1、生产线2、机器人、底壳供料机按生产节拍12s相互配合完成整个动作流程。
3 工业机器人末端执行器设计
末端执行器即机器人的手,是工业机器人用于抓取和握紧(吸附)喷枪、焊具、扳手、喷头等专用工具并进行操作的部件[7]。末端执行器安装于机器人的手臂的前端用于执行特定的操作。
本系统设计的执行器主要由两个气缸、连接板、固定板、移动夹爪1和2、固定夹爪1和2等组成,如下图4所示。执行器在原点位置时,两个夹爪由气缸带动打开,然后沿规定路径运动到抓取位置,由气缸带动夹爪闭合,从而夹紧壁挂。放下时,机器人先沿规定路径运动到松开位置,两个气缸运动,夹爪打开,机器人复位,热水器被放到生产线2上。
此执行器通过气缸带动夹爪运动,气缸上有感应器感应气缸移动距离的多少,从而达到可以调节的目的。采用此形式的执行器,能够在顺利完成倒机工作的前提下很大程度上提高效率。

图4 执行器详图
4 工业机器人的选型和程序设计
目前,工业机器人技术在世界范围内已日趋成熟,出现了一批有影响力的、著名的机器人公司,主要有ABB、KUKA、FANUC等等。每个公司生产的机器人有不同的型号,各个型号的机器人又有不同的特点、性能、使用场合。因此要根据自己所设计的系统总体的要求来选择机器人,也要根据开发者自身对各种机器人的了解程度来选择,以减少难度和成本。
4.1选型
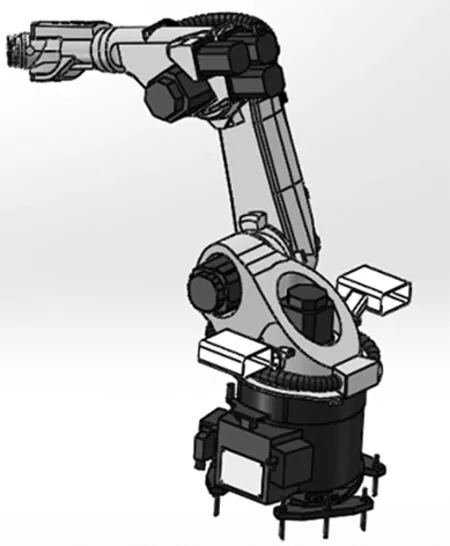
图5 KUKA-KR60-3机器人
本次设计需要的工业机器人需要具有良好的柔性、运动灵活性、能完成复杂动作的等特点,且要求机器人的抓取静态重量在20kg左右,工作半径1.7m。本系统中使用的KUKA-KR60-3工业机器人如图5,它为6轴机器人,最大回转半径为2033m,可重复精度高,最大负荷为60kg。I/O接口16点输入,16点输出,通过I/O接口可以实现和PLC交互通讯。此机器人可以满足系统的设计要求。并且机器人生产效率高、高速高精,具有专用的编程工具,易于编程并且具有良好的人机界面。
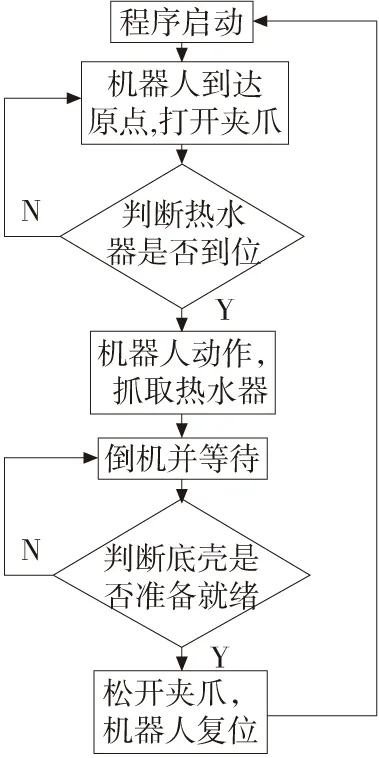
图6 程序流程图
4.2程序设计
机器人编程可以保证运动过程和流程将自动完成并始终可反复,库卡机器人使用的编程语言是KRL-KUKA Robot Language(库卡机器人编程语言)[13]。库卡机器人编程语言与VC语言相似,都是采用模块化的编程方法。KUKA机器人可以采用在线编程和离线编程两种方法对机器人进行运动、通信和I/O控制。
为了满足电热水器倒机过程的动作流程,编制了工业机器人的运动程序,图6为主程序的流程图。
5 结束语
本文以生产车间电热水器倒机为研究背景,在分析了其工艺流程及控制需求的基本条件的基础上,提出了基于工业机器人的电热水器倒机自动化系统的设计方案和方法。设计了基于工业机器人的自动化系统,目前该系统已经在某电热水器生产车间得到很好的应用。 ,电热水器的倒机工作需要人工来完成,并且还要完成底壳的放置等工作,劳动强度大。该系统投入使用后,此工位不需要人力操作,减轻了工人劳动强度,减少了企业用人成本,提高了工厂自动化程度和生产效率。现场运行情况来看,所设计的电热水器倒机系统达到了预期的功能需求,具有很好的实用性和设备稳定性,满足了生产车间的生产需求,避免了因人为因素造成的产品损坏,提高了产品质量和生产效率。
[1] 曹斌,秦磊,汪军. 采用关节机器人的齿轮机床自动上料对齿方法的研究 [J]. 机械设计与制造,2013(3):63-65.
[2] 朱华炳,秦磊,张希杰,等. 基于工业机器人的齿轮轴磨削自动化系统设计与研究[J].组合机床与自动化加工技术,2013(12):41-44.
[3] 胡孔元,朱华炳,张希杰,等. 基于工业机器人的汽车齿轮轴磨削自动化系统设计 [J]. 组合机床与自动化加工技术,2014(9):97-101.
[4] 杜志军. 工业机器人的应用及发展趋势 [J]. 机械工程师,2002(5):8-10.
[5] 覃南强,谭仲海. 基于工业机器人的冲压自动上下料系统的设计 [J]. 企业科技与发展,2015(10):43-45.
[6] 曹斌,张卫荣,汪军. 基于关节机器人的盘齿热前加工自动上下料系统的设计 [J]. 制造业自动化,2012,34(7):8-10.
[7] 沈健. 几种常用二指平动抓手的结构和特点 [J]. 组合机床与自动化加工技术,2005(12):86-88.
[8] 黄贤新. 工业机器人机械手设计 [J]. 装备制造技术,2012(3):220-221.
[9] 常丽文,王孙安.一类关节式机械手本体及控制系统设计 [J]. 机床与液压,2004(9):15-17.
[10] 张丰华,韩宝玲,罗庆生,等. 基于PLC的新型工业码垛机器人控制系统设计 [J]. 计算机测量与控制,2009,17(11):2191-2193.
[11] 高伟增,徐君鹏. 松下PLC编程与应用 [M]. 北京:机械工业出版社,2015.
[12] 蒋刚,龚迪琛,龚勇,等. 工业机器人 [M].成都:西南交通大学出版社,2011.
[13] 库卡(德国)机器人有限公司. 标准培训教材KRC4 [Z]. 德国:库卡机器人有限公司,2011.
(编辑李秀敏)
Design and Research of the Turning of Electric Water Heater Automation System Based on Industrial Robot
In the assembly workshop of electric water heater, the turning automation of electric water heater is very low. Aiming at this practical problem, this paper puts forward the application of an industrial robot for turning of electric water heater between two production lines with the characteristics of industrial robot and designs a set of turning of electric water heater automation system. The system uses PLC as the main controller to coordinate among the industrial robot, two production lines and shell bottom feeding machine movement and use this system to replace the manual to finish the turning of electric water heater. The system has been applied in the assembly workshop of a certain electric water heater, which can reduce the labor cost, improve the automation level and production efficiency of the enterprise, and improve the stability of the product.
industrial robots; electric water heater; machine turning; automatic system
1001-2265(2016)09-0058-03DOI:10.13462/j.cnki.mmtamt.2016.09.016
2015-10-29
王玉闯(1990— ),男,河南驻马店人,郑州大学硕士研究生,研究方向为数控加工、自动化、机电一体化,(E-mail)wychuangzzu0319@163.com。
TH16;TG659
A
