基于改进人工势场法的服务机器人路径规划
2016-11-03李汉舟李瑞峰
杨 娜,李汉舟,郭 静,李瑞峰
(中国航天科技集团第十六研究所,西安710100)
基于改进人工势场法的服务机器人路径规划
杨娜,李汉舟,郭静,李瑞峰
(中国航天科技集团第十六研究所,西安710100)
人工势场法是服务机器人路径规划算法中一种简单有效的方法。针对传统人工势场法存在的目标不可达问题,通过在原来的斥力函数中加入一个调节因子的方法解决,同时采用遍历搜索法解决局部极小值问题,并引入安全距离以及改进调节因子以提高机器人路径规划过程中的安全性能。最后,利用Matlab软件将改进后的人工势场法应用于服务机器人路径规划并进行了仿真实验。仿真结果表明,基于改进人工势场法的服务机器人路径规划有效地解决了机器人不能到达目标点的问题。
服务机器人;路径规划;人工势场法;遍历
0 引言
对服务机器人进行路径规划的目的就是为了在机器人导航过程中,通过相应的算法,并遵照一定的准则引导机器人避开行驶路径中可能遇到的障碍物,顺利到达目标点位置,最终完成指定任务。而服务机器人所需要遵循的准则一般是路程最短、时间最少或者机器人所消耗的能源最小等[1]。根据所得到环境信息的不同,服务机器人路径规划算法可以分为两类。其中,最先出现的路径规划算法被称为全局路径规划,这类算法是针对环境已知情况的,此时机器人运动空间中的障碍物信息是完全已知的。最基本的全局路径规划算法有结构空间法[2]、可视图法[2]、单元分解法[3]以及遗传算法[4]等,之后学者们又对其进行了更深入的研究,改进后的遗传算法[5]、神经网络[6]、蚁群算法[7]等也逐渐被用于机器人全局路径规划算法中。然而,只研究全局路径规划算法是不切实际的,因为服务机器人的工作环境通常是动态的,机器人可能需要在人群中穿梭或者绕过突然出现的障碍物,这时仅依靠全局路径规划算法就可能无法成功引导机器人无碰撞地到达目标点。因此,研究者们提出另一类路径规划算法——局部路径规划算法。这类算法需要机器人实时地探测周围环境,通过传感器反馈回来的信息进行路径规划。比较常用的局部路径规划方法有人工势场法[7]、向量场矩阵法[8]等。同时学者们一直致力于研究更加高效以及可靠的局部路径规划算法,改进后的人工势场法[9]、遗传算法[10]、粒子群优化算法[11]等均被用于局部路径规划中。未来服务机器人的工作环境将会更加复杂且变化迅速,因此研究者们越来越重视局部路径规划算法的研究[12]。
路径规划是服务机器人自主导航的重要环节,研究高效率、适应性强、安全性高的路径规划算法是确保机器人完成安全高效导航任务的关键。人工势场法相对于神经网络、遗传算法等算法具有规划效果安全可靠、计算量小的优点,一直以来都受到广泛关注,但该算法仍存在机器人在运行过程中遇到某些特殊情况而出现的不能到达目标点的问题。本文通过引入安全距离以提高机器人的安全性能,改进斥力场函数以解决目标不可达问题,并通过遍历搜索法来解决局部极小值问题。在此基础上,又对传统的斥力函数调节因子进行了改进,进一步提高了路径规划的安全性能。最后,利用Matlab软件验证了论文改进方法的有效性。
1 传统的人工势场法
1.1传统人工势场法模型
传统的人工势场法是一种典型的梯度势场法,假设机器人在运动空间中具有一定的抽象势能,这种抽象势能的负梯度方向指向机器人所受抽象力的方向,而这种抽象力就可以引导机器人绕过影响范围内的障碍物,朝目标前进并最终到达目标点。该方法的具体实现过程是,首先在机器人的运动空间中创建一个虚拟势场,机器人在该势场的势能由引力势能和斥力势能两部分组成,其中引力势能由目标提供,斥力势能由障碍物提供。之后分别对两部分势能求负梯度得到引力与斥力,引力指向目标方向,斥力指向远离障碍物方向。最终机器人所受到的抽象力由引力部分和斥力部分的叠加得到,机器人将沿着合成的抽象力方向运动,绕开障碍物,向目标点运动。在势场中机器人的受力分析如图1所示。

图1 传统人工势场法模型Fig.1 The model of traditional artificial potential field method
假设机器人的二维工作空间为W=[x y]T,势场的构造是应用引力与斥力共同对机器人产生作用为:

其中,Ua(W)为引力势能,Uo(W)为斥力势能。故此,势场中机器人的合力表示为:

其中,引力Fa=-grad[Ua(W)],斥力Fo= -grad[Uo(W)]。
1.2机器人引力与斥力计算
目标对机器人的引力势能函数为:

其中,α为引力增益系数,W和Wa分别为当前机器人与目标点在二维空间中的坐标,ρa=为机器人与目标之间的相对距离,则相应的引力可转化为:

障碍物的斥力势能函数定义为:
其中,β为斥力增益系数,ρ0是障碍物的影响距离,ρ为机器人与障碍物的最短距离。则相应的斥力为:

传统的人工势场法通过对已知障碍物与目标点信息进行建模,同时在机器人运行过程中对障碍物进行实时检测,得到上述公式中的各项参数信息,并最终求得机器人每一时刻所受到抽象力的方向,引导机器人避开障碍物,安全到达目标点。
1.3传统方法不足分析
本文在对传统的人工势场法进行分析后,发现该算法在某些方面存在不足,需要对其进行后续的分析以及改进。当目标点在某一个或多个障碍物的影响范围内时,机器人向目标逼近,障碍物对机器人产生的斥力势能将快速增加,从而使得机器人所受斥力快速增大,同时目标点对机器人产生的引力势能快速减小,则斥力有可能会大于引力,导致机器人只能在目标点附近移动,这就造成了目标不可达问题。而机器人在运行过程中,还可能会遇到另外一种情况,即陷入局部极小值点。这种情况是当机器人与目标之间出现一个或多个障碍物时,障碍物对机器人产生的斥力与目标所产生的引力大小相等且方向相反,这就使得机器人所受到的势场合力F=Fa+Fo=0,此时机器人就会停止前进,从而陷入局部极小值点,导致路径规划失败。
2 改进的人工势场法
2.1改进思路
为了找出这种问题的解决方案,对传统的人工势场法进行分析发现,传统的人工势场法是用虚拟力控制机器人运动的,而这种方法就会导致上述情况发生。而当我们将每个路径点的势场强度之和作为判据,通过遍历搜索算法比较路径点势场大小,选择势场和最小点为下一路径点时,这样机器人总是朝着势能下降的方向运动,最终到达势能为0的目标点位置。同时为了解决传统算法的目标不可达问题,本文对传统人工势场法的斥力势场函数进行改进,将机器人与目标之间的距离引入斥力场函数中,并通过引入安全距离将障碍物影响距离进行分段,在障碍物影响距离内加入安全距离,确保机器人在障碍物安全距离内所产生的斥力势场比引入之前所产生势场值更大,这样可以提高机器人原理障碍物的趋势,从而提高机器人路径规划过程中的安全性。
改进后的机器人斥力势场函数如式(7)所示:

式中,β为初始算法中的斥力增益系数,ρ0为传统算法中的障碍物影响距离,而ρ1即为论文中引入的安全距离,δ为安全距离所对应的斥力增益系数。分别对引入安全距离前后的斥力势能函数进行数据分析,得到障碍物附近斥力势能示意图如图2所示。图2中,横坐标为机器人运行空间的x轴,目标点在(10,10)处,障碍物坐标分别为(3,3)、(5,7)、(8,7),纵轴为斥力势能值。从图2中可以看出,改进后的斥力势场值在障碍物附近升高的趋势更快,这是因为引入安全距离后,当机器人与障碍物之间的距离小于安全距离时,改进方法所产生的斥力势能值比改进前斥力势场值大,这也就提高了机器人的安全性能。
而图3、图4又分别给出了改进前后算法在运行空间中所产生的总势能平面图与立体图。在机器人运行空间中,设定目标点坐标为(10,10),障碍物坐标分别为(3,3)、(5,7)、(8,7)。从图3和图4中可以看出,两种方法目标点的势能为0,距离目标物越远,势能越大,而障碍物附近的势能值有突变。当障碍物离目标物越近时,所产生的势场值也就越小,这也就避免了当障碍物距离目标太近时目标点势能不为0的情况。而同样还可以看出,改进后障碍物附近所产生的势能升高的趋势更加明显,在安全距离影响范围内机器人所产生的斥力势能也更大。

图2 改进前后斥力势场强度侧面示意图Fig.2 Lateral schematic diagram of the intensity of the repulsive potential field before and after improvement


图3 改进前后总势场强度平面示意图Fig.3 Complanate schematic diagram of the intensity of the total potential field before and after improvement

图4 改进前后总势场强度立体示意图Fig.4 Stereoscopic schematic diagram of the intensity of the total potential field before and after improvement
2.2对斥力势场函数调节因子的改进
在先前的研究基础上,本文又将改进方法中的调节因子改为(eρ2a-1),则改进后的斥力场函数为:

为了验证论文提出方法的优越性,针对传统改进方法中不同n值的调节因子与论文改进后的调节因子进行了数据分析对比,得出的数据规律基本相同。图5(a)、图5(b)分别给出了当n=4与n=12时本文方法与传统改进法中调节因子系数项的曲线示意图。

图5 改进方法调节因子对比图Fig.5 Comparison of adjustment factor of improved method
从图5中可以看出,本文提出的调节因子较传统改进方法中调节因子收敛速度快。而在基于人工势场法的路径规划算法中,机器人所受到的斥力势场与调节因子值成正比。因此,从图中曲线走势可以得出:当机器人与目标物距离较远时,本文提出方法得到的斥力势场值要远远高于传统改进方法的斥力势场值,也就是说远离目标物时机器人所受到的斥力更大,也就提高了机器人路径规划的安全性;而当机器人逐渐靠近目标物时,本文方法的斥力势场函数值迅速下降,逐渐小于传统改进法的值并趋于0,这在解决了传统方法中目标不可达问题的同时,提高了机器人向目标方向运动的趋势。因此,可以得出结论,本文改进方法相比传统改进方法具备一定的优越性。
3 仿真分析
3.1算法思路
改进算法的实现思路为:在建立了势场模型的前提下,给定机器人每一步所走的步长,设定初始化势场值。以机器人为圆心,步长为半径的圆即为机器人下一路径点范围。从起点开始,通过在每一个圆上取均匀的若干个点,分别计算这若干个点的势能值,遍历整个路径点范围得到唯一一个势能值最小点即为机器人下一路径点。该路径规划算法具体的程序流程如下:
1)建立势场模型。确定引力场和斥力场的增益系数α和β、障碍物影响距离ρ0、安全距离ρ1、极限步数s(防止程序无限循环)以及移动步长R(假设机器人是匀速前进的)。设定初始化势能值U以及初始化的角度θ,同时确定机器人起始位置x0、y0。
2)判断机器人是否到达目标点,如果到达目标点则终止规划过程。
3)在第k时刻时,根据机器人当前位置(xk,yk)以及步长计算若干个点与机器人连线与x轴的夹角,从起点开始,根据已经建立的势场模型以及初始化后的参数计算机器人在若干个点的势能值,与初始化势场值进行比较,若小于初始值则取代,并将该点的夹角值赋给θ,之后按照同样的步骤遍历完整个路径点范围,最终得到的U以及θ即为机器人下一路径点的势场值和运行角度θk。
4)通过式(9)计算第k+1时刻的位置。

5)机器人移动至下一路径点,同时置k=k+1为当前点。
6)判断机器人当前运行的步数是否达到极限步数,如果达到则表明无法到达目标点,可能需要重新调整模型参数,若没有达到则返回第二步继续执行。
3.2仿真结果以及分析
按照以上程序流程,通过Matlab平台分别对改进前的人工势场法以及改进后的人工势场法进行了仿真。程序中设定引力场和斥力场的增益系数α和β均为10,障碍物影响距离ρ0为1.5、ρ1为0.5,极限步数s为500以及移动步长R为0.05。并设定初始化势场值U为10000以及初始化的角度θ为0,同时确定机器人起始位置(x0,y0)为(0,0)。
同时在机器人运动空间中设置了3个障碍物,分别单个或2个障碍物距离设置在机器人运行路径前方或目标点附近,仿真结果如图6、图7和图8所示。其中,图6(a)、图7(a)和图8(a)为改进前的人工势场法仿真结果,图6(b)、图7(b)和图8(b)为改进后的人工势场法仿真结果,方块为机器人初始位置,圆圈为障碍物位置,倒三角为目标点位置,空间中的曲线即为程序运行完之后所得机器人在运动空间中的运行轨迹。
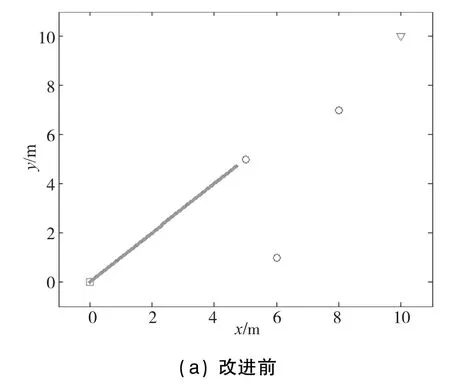

图6 对单个障碍物局部最小值问题的改进结果Fig.6 The results of the improvement of the local minimum value problem for a single obstacle
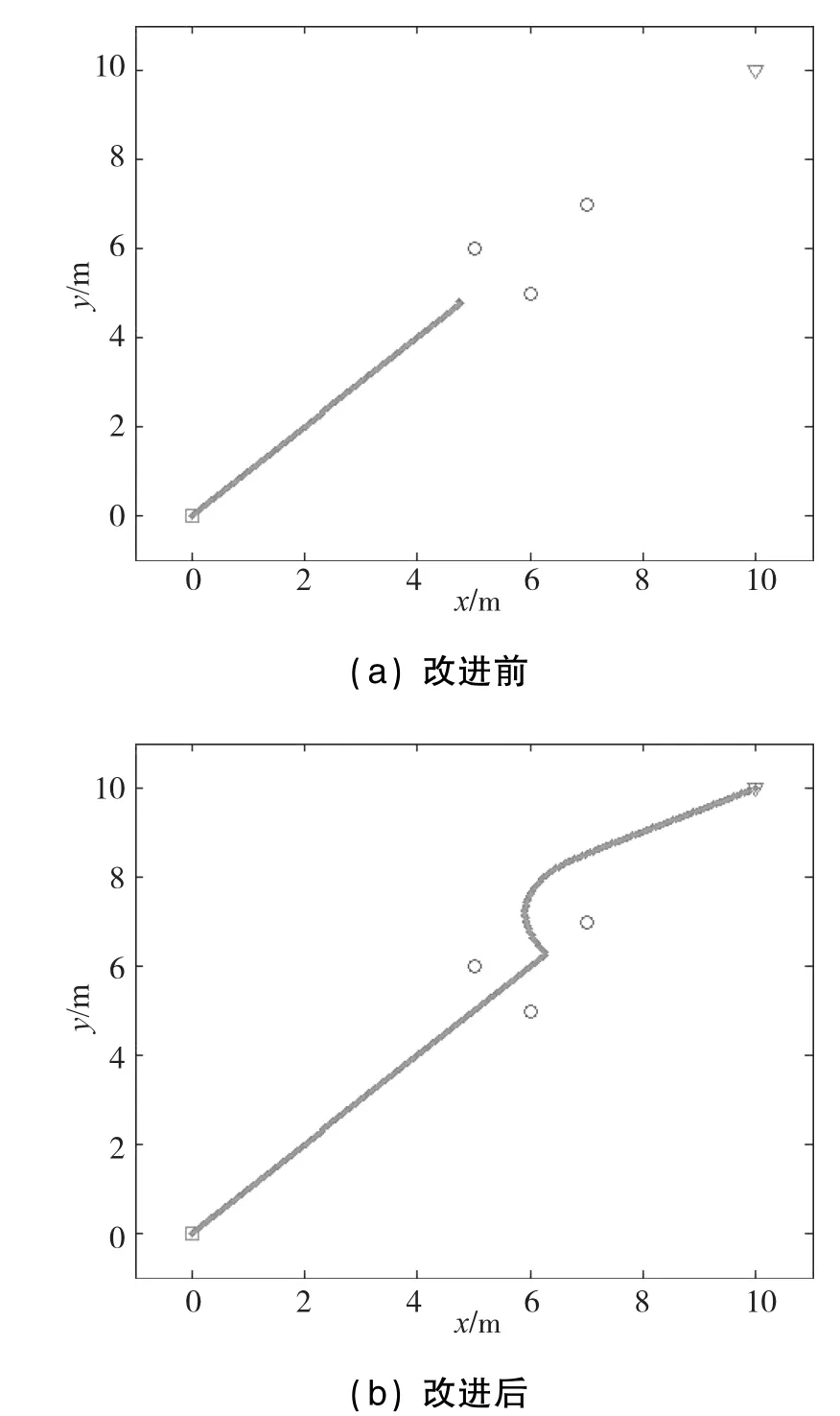
图7 对多个障碍物局部最小值问题的改进结果Fig.7 The results of the improvement of the local minimum value problem for multiple obstacles

图8 对目标不可达问题的改进结果Fig.8 The results of the improvement of the target's non reachable problem
从仿真结果可以看出,改进前后方法都可以控制机器人开始都朝着目标点运行。然而传统的方法在遇到单个或多个障碍物与目标所产生的合力为0时会在障碍物附近徘徊,而改进后的方法在机器人遇到同种情况时可以控制机器人成功地绕过了障碍物,继续朝目标点前进,由此也证明了改进后的路径规划算法的有效性。因此得出结论,将机器人下一路径点范围的势场值作为判据并采用遍历搜索法进行路径规划的算法很好地解决了局部极小值问题,能够引导机器人到达目标点。采用传统人工势场法时,机器人并不能到达目标点,而是在目标点附近徘徊,而采用改进方法却可以顺利到达目标点,由此也证明了改进后的路径规划算法的有效性。
4 结论
随着计算机技术、传感技术等的飞速发展,未来服务机器人将成为一个巨大的产业,而路径规划算法作为服务机器人研究领域的一项关键技术,受到了越来越多的重视。本文对基于人工势场法的路径规划算法进行了研究,该方法具有计算量小、可靠性高等优点,然而利用人工势场法进行路径规划时,可能会存在某些情况下机器人无法到达目标点的问题。本文采用遍历搜索算法解决了局部极小值的问题,并引入安全距离提高了机器人路径规划的安全性能,同时对斥力场函数的调节因子进行了改进,从而解决目标不可达问题。仿真分析结果证明了论文算法的有效性。然而,未来服务机器人的工作环境将会越来越复杂,需要应对多变的动态环境,这就需要我们对路径规划算法不停地完善以适应未来服务机器人对路径规划技术的更高要求。
[1]Raja P,Pugazhenthi S.Optimal path planning of mobile robots:a review[J].International Journal of Physical Sciences,2012,7(9):1314-1320.
[2]Lozano-Pérez T,Wesley M A.An algorithm for planning collision-free paths among polyhedral obstacles[J].Communications of the ACM,1979,22(10):560-570.
[3]Lozano-Pérez T.Spatial planning:a configuration space approach[J].IEEE Transactions on Computers,1983,32(3):108-120.
[4]Khatib O.Real time obstacle avoidance for manipulators and mobile robots[J].International Journal of Robotics Research,1986,5(1):90-98.
[5]Hu J,ZhuQB.Multi-objectivemobilerobotpath planning based on improved genetic algorithm[C].International Conference on Intelligent Computation Technology and Automation,2010:752-756.
[6]Jung I K,Hong K B,Hong S K,et al.Path planning of mobile robot using neural network[C].IEEE International Symposium on Industrial Electronics,Bled,Slovenia,1999,3:979-983.
[7]Buniyamin N,Sariff N,Wan Ngah W A J,et al.Robot global path planning overview and a variation of ant colonysystem algorithm[J].International Journal of Mathematics and Computers in Simulation,2011,5(1):9-16.
[8]Latombe J C.Robot motion planning[J].Academic Publisher,Boston,1991.
[9]Vadakkepat P,Tan K C,Liang W M.Evolutionary artificial potential fields and their application in real time robot path planning[C].Proceedings of the Congress on Evolutionary Computation,2000:256-263.
[10]Yun S C,Parasuraman S,Ganapathy V.Dynamic path planning algorithm in mobile robot navigation[C].IEEE Symposium on Industrial Electronics and Applications, 2011:363-369.
[11]Zhang Q R,Gu G C.Path planning based on improved binary particle swarm optimization algorithm[C].Proceedings of the IEEE International Conference on Robotics,Automation and Mechatronics,2008:462-466.
[12]Savkin A V,Wang C.Seeking a path through the crowd: robot navigation in unknown dynamic environments with moving obstacles based on an integrated environment representation[J].RoboticsandAutonomousSystems,2014,62(10):1568-1580.
Path Planning of Service Robot Based on Modified Artificial Potential Field Method
YANG Na,LI Han-zhou,GUO Jing,LI Rui-Feng
(The 16thInstitute,China Aerospace Science and Technology Corporation,Xi'an 710100)
The artificial potential field method is a simple and effective method for the path planning algorithm of the service robot.A regulation factor was joined in the original repulsion function to resolve the presence of target accessibility issues of the traditional artificial potential field method,and the traversal search method was adopted to solve the local minimum value problem,and then the safe distance and improvement of the adjustment factor were introduced to improve the safety performance in robot path planning process.The improved artificial potential field method is applied to the path planning of the service robot,and the simulation experiment is carried out by using the Matlab software.The simulation results show that the path planning of the service robot based on the improved artificial potential field method can effectively solve the local minimum problem.
service robot;path planning;artificial potential field algorithm;ergodic
TP24
A
1674-5558(2016)01-01227
10.3969/j.issn.1674-5558.2016.05.008
杨娜,女,硕士,研究方向为服务机器人导航技术。
2016-01-06
