仿蝗虫跳跃机器人的后腿跳跃机械结构设计
2016-11-02徐成宇朱人杰张宝庆曹晓捷张连青袁慧静熊梦强
徐成宇,朱人杰,张宝庆,曹晓捷,张连青,袁慧静,熊梦强
(长春理工大学机电工程学院,长春 130022)
仿蝗虫跳跃机器人的后腿跳跃机械结构设计
徐成宇,朱人杰,张宝庆,曹晓捷,张连青,袁慧静,熊梦强
(长春理工大学机电工程学院,长春130022)
依据蝗虫身体结构及其运动特点,采用齿轮、凸轮传动,弹簧储能等机构部件,构建仿蝗虫跳跃机器人三维模型。用摆动从动件凸轮的柔性膝关节模拟半月板的能力释放,建立了以基圆半径最小作为优化目标,按压力角优化的数学模型,确定了仿蝗虫机器人后腿跳跃机构尺寸。仿真结果表明:通过MATLAB绘制凸轮的理论与实际廓线,使体积在优化后降低了22%,通过ADAMS的接触应力分析,确定了凸轮副最大承载力不应低于15KN。此设计研究确定了仿蝗虫机器人的后腿跳跃机械结构尺寸,减小蓄力凸轮体积,为其下一步系统结构优化设计奠定基础。
仿蝗虫机器人;凸轮廓线优化;柔性膝关节;ADAMS;MATLAB
仿生跳跃机器人涉及了诸如仿生学、机械学和控制学等多个学科,通过从生物体灵巧的运动机构和机敏的运动模式上获取灵感,起到提升跳跃机器人性能的作用,故逐渐成为了热门研究方向。随着研究的深入,这种技术现在大多被用来在外星探索领域,再加之月球与火星表面重力加速度大大小于地球这一因素,跳跃机器人可以轻松越过数倍甚至数十倍于自身尺寸的障碍物,因此越障这一功能在跳跃机器人上广泛运用。近年来,世界各知名科研院所,大学的科学家、学者、教授们正试图研制能模仿动物运动机理的机构模型,例如:美国宇航局(NASA)下属的喷气动力学实验室(JPL)与加利福尼亚技术学院联合研制的仿青蛙弹跳机,在扩大漫游车在星际探索中崎岖地形地貌下的活动范围起到作用[1];Hyon S H和Mita T研究设计出的’KenKen’机器人[2]意在通过模仿肌腱在跑和跳过程中起到的作用,证明了此结构对腿型机器人小跑步态的有效性。国内的西北工业大学葛文杰教授开展了对于仿袋鼠跳跃机器人的动力学、运动学特性的深入研究[3]。Heitler W J[4]通过动物身体结构角度分析指出,在蝗虫跳跃时,骨骼结构为杠杆,关节结构为支点,而肌肉、肌腱则提供动力;Burrows M等人[5]则对蝗虫后腿的关节组织进行深入研究,采用解剖学方法揭示了后腿关节在起跳阶段的运动变化。生物学研究表明:蝗虫后腿的膝关节是跳跃运动核心,其中的半月板结构是跳跃的重要保证,一次成功的起跳需要后腿足够大的蹬地力和与之相对应的速度[6]。目前,仿生跳跃机器人的研制大多都将关注点放在了跳跃运动机理和机构实现这两个方面,其研究的模型与地面多为点接触,缺乏对跳跃系统中单个部件能量变化的研究,忽略其变化对整个跳跃系统的影响,本文着眼于仿蝗虫机器人的关键部位——膝关节,提出了采用弹簧作为储能元件、凸轮作为蓄力和释放装置的仿生关节的设计方案,建立柔性膝关节,并对凸轮进行了优化设计。
1 模型建立
蝗虫的跳跃运动过程分为着地阶段和腾空阶段,着地阶段可分为起跳与落地两个阶段。蝗虫的腿部肌肉的能量变化主要反映在着地阶段,而跳跃能力的高低主要体现在起跳阶段。腾空过程中身体质心变化较小,运动相对平稳。因此,本文着重对于仿蝗虫跳跃机器人着地阶段中的起跳阶段进行研究。

图1 蝗虫外部结构形态图
蝗虫的主要肌肉,其一为胫骨伸展肌肉,引起腿的伸开,另一块为曲肌,使得腿收起。如图1所示,其腿节与胫节相连,可在一定方向内转动。腿节上肌肉一端连接在腿节,另一端与腿节的腱筋相连,腱筋则通过与腿节和胫节的关节连接到达胫节和跗节。研究者发现,在蝗虫后足腿节与胫节的连接处有一个半月板装置,类似于弹簧,蝗虫起跳前通过腿节的肌肉拉动半月板,起跳时突然释放其中的能量,使胫节快速后摆,完成蹬地动作。
为了更加真实模拟蝗虫的上述特性,特别是其腿部肌肉与半月板结构在起跳过程中发生变形,因此引入了柔性机构,利用它的这一特点来模拟蝗虫肌肉储能作用,分析蝗虫起跳阶段中柔性体对起跳力、力矩的影响。其不仅能减小对地面的振动和冲击,还能合理有效的储存和释放能量,从而达到低能耗的目的。
通过前述分析,所设计的仿蝗虫跳跃机器人,如图2所示。其主体由后腿弹跳机构、前腿爬行减震机构、翅膀结构所组成。跳跃机器人采用后腿弹跳工作原理,其机构由凸轮机构、六连杆机构和弹簧装置构成,图3为总体机构运动简图,通过蜗轮蜗杆机构、齿轮机构传动,使凸轮机构的蓄力,依靠弹簧的瞬间释放给地面很大的作用力,从而获得很大加速度带动机体腾空而起。前腿爬行减震机构为多自由度连杆机构,配有减震弹簧,减轻蝗虫机器人落地重量。
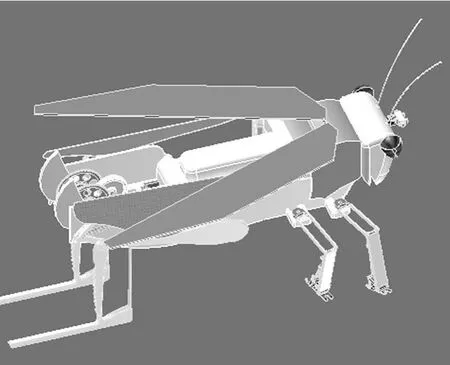
图2 仿蝗虫机器人总体结构图

图3 总体机构运动简图
2 柔性膝关节设计
如前所述,蝗虫的后腿的膝关节受到腿节处的伸肌、屈肌即关节内半月板的共同作用。起跳时,屈肌突然放松,立即释放出半月板积聚的能量,使腿部快速伸展。根据机器人膝关节和腿部的运动特点,蝗虫的半月板结构使用线性弹簧机构来模拟,从而提出柔性膝关节模型,用于获得较大的收缩角度,同时产生较大的蹬地力。如图4所示,通过凸轮轮廓的特殊设计,在凸轮装置带动从动件摆过一定角度之后,凸轮与从动件突然解除约束,使得从动件在弹簧的带动下快速回摆,从而实现了收腿与摆腿的动作。

图4 弹簧储能元件
2.1蓄力凸轮运动规律确定
相较于一般凸轮机构的推程、回程以及休止期,柔性关节中只需休止期和推程。推程时,从动件带动胫节朝内回收,回程时从动件和凸轮廓线脱离,使从动件完成一个类似急回的动作,而休止期的设置是为了急回之后到下一次的推程过渡地更加平稳。
凸轮从动件的运动规律,选用等加速等减速运动。
推程段从动件运动方程为:

推程段从动件运动方程为:

式中:βm为从动件升程(摆动的最大角度),ϕ为凸轮推程角,β为从动件摆角。
此处取βm=80°,ϕ=180°,另取凸轮休止角ϕs=180°,即可得到摆动从动件休止期和推程的运动规律线图(图5):
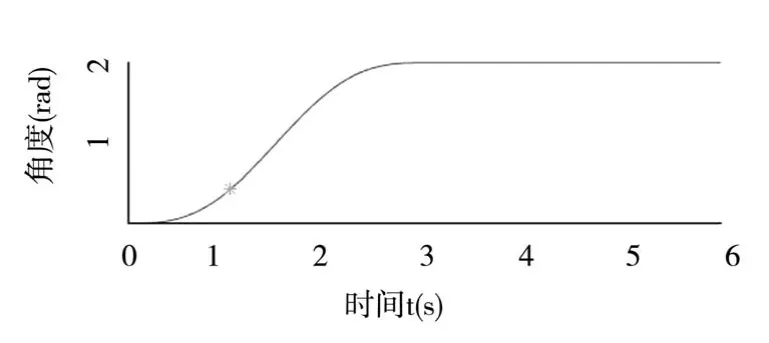
图5 摆动件运动规律线图
2.2凸轮轮廓线设计
根据从动件的运动规律,采用优化设计确定凸轮基圆半径、摆杆长度、凸轮轴和摆杆回转轴的中心距等基本尺寸。其中需重点考虑压力角对于传动效率的影响,由于此处凸轮机构的升程起蓄力作用,载荷较大,若压力角过大,会导致蓄力过程中的摩擦损耗增大,有卡死的情况发生,故优化设计的目的是在给定许用压力角条件下,优化各参数,使整个机构的尺寸尽可能小,结构上更加紧凑。

图6 摆动从动件平面凸轮
图6为摆动从动件平面凸轮的基本构型,令凸轮转动方向同从动件的转动方向相反。凸轮理论轮廓的基圆半径r0与滚子半径rr、摆杆初始位置角β0、摆杆长度L、凸轮轴和摆杆回转轴的中心距C有关,即

此处取C=55mm;r0=15mm;L=42mm。则凸轮理论廓线的直角坐标方程为:

由于理论廓线与实际廓线在法线方向上的距离处处相等,且等于滚子半径rr,故可得到实际廓线的表达式为:

其中:

取rr=10mm,通过MATLAB绘图,可得凸轮廓线,如图7所示:
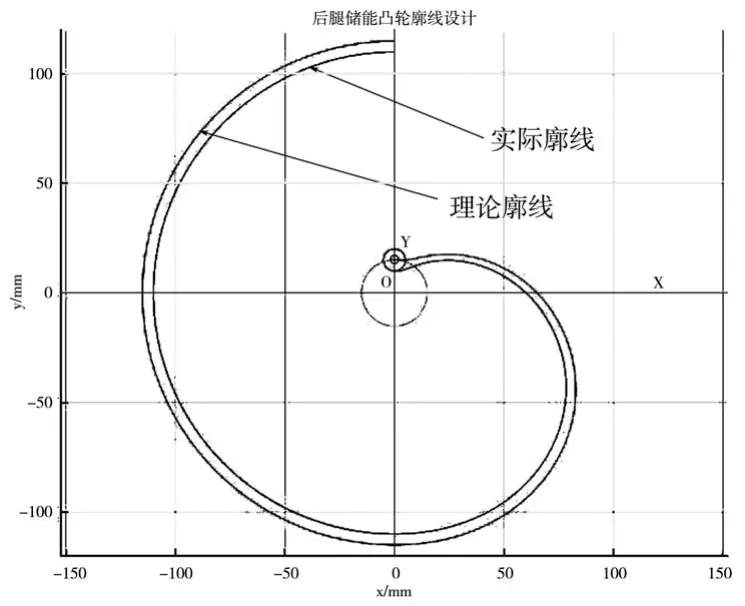
图7 蓄力凸轮廓线
3 约束条件的确定及优化
根据文献[7-8]介绍的摆动从动件凸轮按压力角优化设计的方法[7],优化目标为基圆半径最小要求,可得到基圆半径的目标函数为:




约束条件为:
(1)保证从动杆在初始位置和终了位置的压力角不得超过[α]:

(2)凸轮转角限制:
(3)凸轮最小曲率半径限制:

选取多目标优化函数FMINCON函数[8]求解具有不等式约束的非线性规划问题,其标准形式为:

4 后腿跳跃机构尺寸确定
经过计算的最优组合为:rr=5mm,βm=110°,[α]=45°,C=48.8mm,ds=2mm,r0=10mm;L=36.9mm,此时的凸轮廓线如图8所示和优化前后各量的对比见表1。
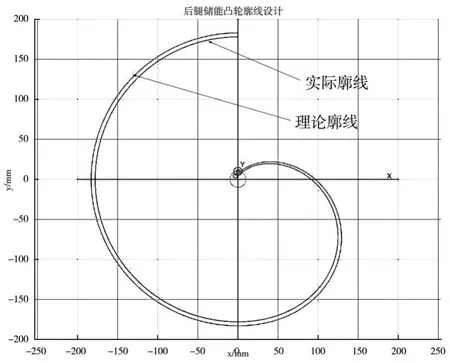
图8 优化后凸轮廓线

表1 优化前后各量值的对比
根据上述的分析,得出仿蝗虫机器人电子样机的整机尺寸:体长1100mm,体高260mm,体宽200mm,前、中足腿长200mm,后腿胫节300mm。重量约为5kg。其中,弹簧刚度系数k=25N/mm,弹簧原长125mm,最大伸长量100mm。后腿弹跳机构示意图如图9所示。

图9 弹跳机构结构示意图
5 接触应力分析
滚子从动件盘形凸轮机构中,滚子与凸轮轮廓表面理论上为线接触,但受到材料的弹性变形的作用,滚子与凸轮表面实际情况是微小的面接触,由弹性力学中赫兹公式可知,接触应力发生在接触区中线上,计算公式[9]为:
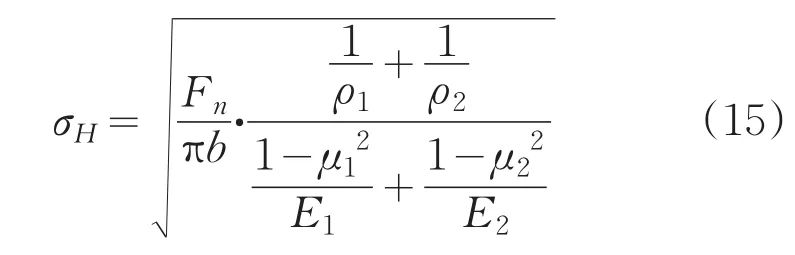
式中:Fn——凸轮滚子法向载荷(N);b——滚子与凸轮接触线长度(mm);ρ1,ρ2——凸轮实际轮廓线曲率半径、滚子半径(mm);μ1,μ2——凸轮与滚子材料的泊松比;E1,E2——凸轮与滚子材料的弹性模量(MPa)。
如图9所示,Fn为凸轮滚子法向载荷,Fq为滚子所受载荷,α为图示点处的压力角,有几何关系可知:


图9 凸轮受力示意图
凸轮廓线上各点压力角与曲率半径均不相同,为求解接触应力,需求出各点的压力角和曲率半径。当凸轮转动到φ时,从动件摆角为β1,此点距离转动中心为C,该点的压力角与理论廓线曲率半径为:
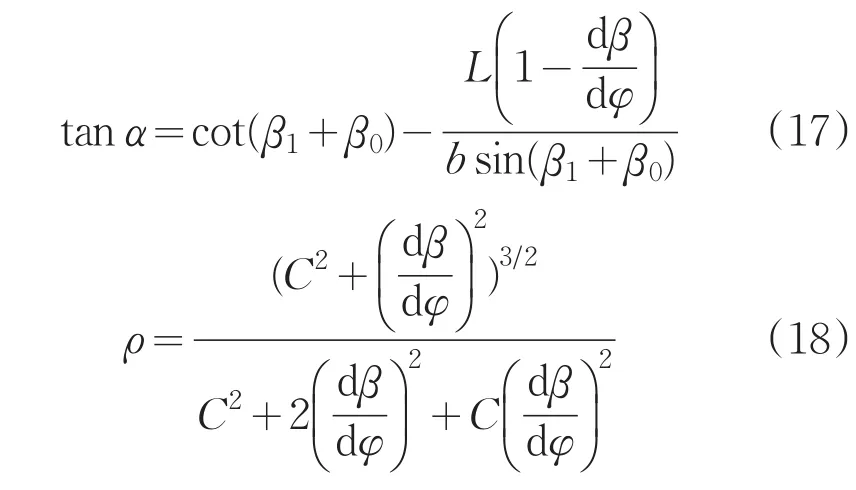
凸轮实际廓线曲率半径为

将凸轮导入ADAMS中,凸轮与滚子均选用ABS材料,设定材料参数(表2)后,进行运动仿真,得到接触应力曲线如图9所示:

表2 凸轮副材料参数表

图10 接触应力曲线
从图10中可看出最大应力不超过12KN,取许用系数1.2后取整,故设定的最大承载力不应低于15KN。
6 跳跃结果
图11描述了样机系统在跳跃腾空阶段中的某一瞬间的姿态,从图可看到,样机在仿真过程中姿态基本平稳,与水平面夹角都在±8°以内,如图12所示,它的跳跃曲线的最高点高度接近1750mm。

图11 仿蝗虫机器人跳跃姿态
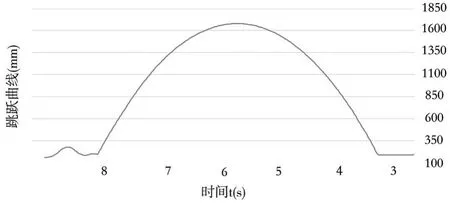
图12 仿蝗虫机器人跳跃曲线
7 结论
基于仿生学原理,建立仿蝗虫跳跃机器人的机构模型,用摆动从动件凸轮的柔性膝关节模拟半月板的能力释放,使腿节在弹簧的带动下快速回摆;以基圆半径最小作为优化目标,按压力角优化的数学模型,通过MATLAB绘制凸轮的理论与实际廓线,使体积在优化后降低了22%,设计了仿蝗虫机器人后腿跳跃机构尺寸;通过ADAMS的接触应力分析,确定了凸轮副最大承载力不应低于15kN,跳跃机器人的跳跃高度为1750mm。
[1]Hale E,Schara N,Burdick J.A minimally actuated hopping rover for exploration of celestial bodies[C]. ProceedingsoftheIEEEInternationalConference on Robotics and Automation.San Francisco:IEEE Press,2000:420-427.
[2]Hyon S H,Mita T.Development of biologically inspired hopping robot[C].Proceedings of the 2002 IEEE international conference on robotics automation Washington DC,2002.
[3]李向阳.仿袋鼠机器人柔性跳跃机构的动力学分析[D].西安:西北工业大学,2006.3.
[4]Li X Y.Kinetic analysis of flexible robot kangaroo hoppingmechanism[D].NorthwesternPolytechnic University,Xian.2006.3.
[5]Heitler W J.How locust jump[EB/OL][2012-07-21]. Standrews:The University of St Andrews,2007.
[6]Burrows M,Sutton P.Locusts use a composite of resilin and hard cuticle as an energy store for jumping and kicking[J].The Journal of Experimental Biology,2012,215(19):3501-3512.
[7]ChenDiansheng,YinJunmao,ZhaoKai.Bionic mechanism and kinematics analysis of hopping robot inspired by locust jumping[J].Journal of Bionic Engineering,2011,8(4):429-439.
[8]吕庸厚,周榴明.摆动从动杆盘状凸轮机构按压力角的优化设计[J].无锡轻工业学院学报,1986,5(1):38-54.
[9]杨绘宇,王石刚,梁庆华,等.仿蝗虫跳跃机器人起跳过程运动学建模及分析[J].机械设计,2010,27(4):54-57.
[10]黄尚兵,金光,安源,等.滚子摆动从动件盘形凸轮的设计及优化[J].工程设计学报,2012,12(6):449-453.
Research on the Driving Characteristics of the Take-off Procedure and Modelling of Locust-like Hopping Robot
XU Chengyu,ZHU Renjie,ZHANG Baoqing,CAO Xiaojie,ZHANG Lianqing,YUAN Huijing,XIONG Mengqiang
(School of Mechatronic Engineering,Changchun University of Science and Technology,Changchun 130022)
According to the body structure and movement characteristics of locust,adopting gears,camtransmissions and institutions such as the spring energy storage components,a 3D prototype of locust-like hopping robot is presented.In order to simulating the meniscus to release the power by using oscillating follower cam flexible knee joint,a mathematical model for optimizing pressure angle is established to minimize the radius of base circle.Finally the jumping mechanism size of locust-like robot’s hind legs is determined.The simulation results shows that:drawing the theoretic contour line and actual contour line through MATLAB reduces the volume of cam by 22%,the cam’s maximum bearing capacity no less than 15 KN is determined by the ADAMS analysis of the contact stress.This design research has identified the jumping mechanism size of locust-like robot’s hind legs,decreased the volume of collected-power cam,and provided basis for system construction optimal design in next step.
locust-like robot;contour line optimization;flexible knee;ADAMS;MATLAB
TP242
A
1672-9870(2016)04-0067-06
2016-02-24
吉林省科技发展计划资助项目(KYC-JC-XM-2014-025);吉林省大学生创新创业训练计划项目(2014S032)
徐成宇(1955-),男,博士,讲师,E-mail:825196709@qq.com
