基于小波变换和LS-SVM的船面风速风向估算方法
2016-10-25郭颜萍漆随平
郭颜萍,胡 桐,漆随平
(山东省海洋环境监测技术重点实验室,山东省科学院海洋仪器仪表研究所,山东 青岛 266001)
基于小波变换和LS-SVM的船面风速风向估算方法
郭颜萍,胡桐,漆随平
(山东省海洋环境监测技术重点实验室,山东省科学院海洋仪器仪表研究所,山东青岛266001)
为了对锚泊状态下未来0.5 h的船面风速和风向进行估算,提出了一种基于小波变换和最小二乘支持向量机的估算方法。首先对原始风速数据进行正交分解,得到X轴和Y轴风速;然后分别对X轴和Y轴风速进行小波分解,提取出低频和高频数据序列;其次利用最小二乘向量机方法,分别对低频、高频序列进行估算,分别将X轴和Y轴各序列估算结果进行叠加得到X轴和Y轴估算风速;最后利用矢量法则,同时实现了风速和风向未来0.5 h的估算。以试验船在东海海域锚泊状态下船舶气象仪所测的风速风向数据进行建模与实例验证分析,结果表明该方法具有较高的估算精度。
小波变换;最小二乘支持向量机;短时风速风向;估算方法;锚泊状态
船舶因检疫、候潮、候泊或避风等原因常需在锚地锚泊。船舶抛锚后,由于受风、流、浪等外力因素作用可能发生走锚,导致碰撞、触礁、搁浅等事故的发生。为保障船舶锚泊安全,船员需要准确掌握船舶所在位置未来一段时间的风速风向,以便根据不同风级和风向,合理确定锚泊间距、正确选择锚泊方式、及时调整出链长度[1]。目前大多数船舶主要通过电话、传真、网络等方式获取气象部门发布的海域大风预报信息,但其风场输出数据的空间分辨率较低,难以准确预报船舶所在位置的风级和风向。考虑到船舶一般都装有气象观测设备,该设备通过舱室外测风传感器采集、舱室内主机计算,获取风速风向实时观测数据。如果能够依据这些数据,估算出未来一段时间的风速风向,则便于船员在大风来临前做好充分准备,采取预防措施和应急措施避免走锚,并在风势减弱时及时起锚;动力定位船舶亦可提前做好预防和调整工作,将船舶位移降到最小,减少燃油损耗。
风力发电风电场风速估算研究起步较早,提出了多种短期风速估算方法,其中人工神经网络[2-3]、卡尔曼滤波[4]、最小二乘支持向量机[5-7]、小波分析法[8]等方法较为常用。近年来混合估算优化研究发展极为迅速,因为单一建模方法常常造成同一性质误差的累积,采用两种或两种以上方法能够获得更高的估算精度。另外,由于风速是不稳定的,受气象状况影响,会不间断的、随机性的发生变化,随着估算时间的延长,风速变化的不确定性也将增加,估算出的误差随之增大,因此短时估算的时间段长度定在5~30 min较为合适。本文借鉴风电场风速估算领域提出的方法,将小波变换和最小二乘支持向量机有机结合,用于锚泊状态下未来0.5 h船面风速的估算,并首次提出在风速估算值的基础上进一步对风向作出估算。
1 建模理论
1.1小波分解与重构
1988年,法国学者S.Mallat根据多分辨率分析理论,提出了小波分解与重构的快速算法,称为Mallat算法,它能将函数分解为近似分量和细节分量,近似分量代表低频成分,反映原始信号变化的基本趋势,细节分量描述信号的高频成分,反映原始信号变化的随机波动。设c0(n)为待分解离散信号,根据Mallat算法分解式子可表示为[8]:

式中:cj+1(k),dj+1(k)分别为第j+1层低频系数和高频系数;h,g分别为低频和高频分解滤波器。小波重构是分解的逆过程,重构式子可表示为:

1.2最小二乘支持向量机
1999年,SuyKens等人[9-10]提出了最小二乘支持向量机方法(简称LS-SVM),这种方法将误差平方和的损失函数作为训练集的经验函数,求解过程简化为解一组线性方程。其算法原理如下:
训练数据样本可以表示为:(x1,y1),(x2,y2),…,(xl,yl),其中yi是目标值,xi是输入向量,利用式(3)来拟合样本集,式中φ(x)为从原始空间到高维特征空间的非线性映射,ω为权矢量,b为偏置量。

利用结构风险最小化原则,LS-SVM法回归问题可以描述为求解下面问题:

为了求解上述问题,用拉格朗日法将式(4)的优化问题变换到对偶空间:

式(6)中:αi(i=1,…,l)是拉格朗日乘子;λ为常数;依据优化条件:

可得:

式中:I=[1,2,…,l]T;Z=[φ(x1),φ(x2),…φ(xl)]T;α=[α1,α2,…αl]T,E为l×l单位矩阵;y=[y1,y2,…yl]T。
根据Mercer’s定理引入核函数K(xi,xj)=φ(xi)Tφ(xi),这里采用RBF核函数。求解式(8)方程组得到α和b,从而得到LS-SVM回归函数:

1.3基于小波变换和LS-SVM的估算方法
实际环境中的风速时间序列既具有随机波动性,又具有特殊的周期性,可以看作多个不同频率分量的叠加,运用小波变换的多分辨分析特性将其投影到不同尺度上,各尺度上的子序列分别对应原始序列中不同的频域分量。LS-SVM求解简单、待定参数少、泛化性好,适合解决小样本、非线性、高维数和局部极小点等实际问题[11]。在对风速时间序列进行频域分解的基础上,再结合各频率分量特点进行LS-SVM训练和估算,将有效提高估算精度。充分利用小波变换和LS-SVM两者的优点,对锚泊状态下的船面风速风向时间序列建立估算模型,算法具体流程如下:
(1)以大地为参考,分别取正东、正北方向为X、Y轴正方向,建立直角坐标系,将船面风速分别沿X轴、Y轴方向进行矢量分解,得到X轴风速序列Vx(t)和Y轴风速序列Vy(t);
(2)对X轴风速序列Vx(t)进行小波分解,得到近似分量aj和细节分量di(i=1,2,…,j),然后分别利用这些分量构建训练样本和测试样本,继而运用LS-SVM算法建立估算模型,把输入向量映射到一个高维特征空间中,得到各个分量的估算值(i=1,2,…j);
(3)将步骤(2)中得到的各序列估算值进行叠加得到X轴风速序列的估算结果,即采用同样的方法可以得到Y轴风速序列的估算结果
2 试验验证与分析
2.1小波变换
试验使用的数据为船载气象仪在东海海域每2 min记录一次的平均风速风向数据序列。选取2015年3月15-17日3 d锚泊状态下的实测数据作为数据来源。首先将全部观测点的原始风速序列按照1.3中步骤(1)进行正交分解,得到X轴风速序列Vx(t)和Y轴风速序列Vy(t);然后采用db4基本小波对Vx(t)进行两级分解,对分解后得到的低频逼近信号a2(k)(趋势项)与各个高频细节信号di(k)分别进行小波的单支重构;最后用同样的方法处理Vy(t),Vx(t)和Vy(t)的小波变换结果分别见图1和图2。从图中可以看出,小波分解后的各分量不仅信息更加集中明显,而且保持了时域和频域的局部特征[12]:A2-X和A2-Y的尺度分量主要表现了基本风速,分别反映了X轴和Y轴风速变化的大致趋势,D1-X和D1-Y的小波分量主要表现了随机分量,分别反映了X轴和Y轴风速变化的非线性和波动性,D2-X和D2-Y的小波分量分别表现了X轴和Y轴风速的周期变化分量和部分随机分量。

图1 X轴原始风速时间序列及两层小波分解结果

图2 Y轴原始风速时间序列及两层小波分解结果
2.2样本构建
对风速序列进行小波分解后,分别对得到的各子序列构建训练和测试样本。样本构建方法相同:每个样本由当前时刻前2 h内的60组风速风向数据作为输入变量,由当前时刻顺延0.5 h的风速风向数据作为输出变量。例如,第一个样本以0:00~2:00期间共60个观测点的记录数据作为输入变量,以2:30这一时刻的记录数据作为输出变量;第二个样本以0:02~2:02期间共60个观测点的记录数据作为输入变量,以2:32这一时刻的记录数据作为输出变量,照此滑动顺延得到2 145个数据样本。从中选取1 425个作为训练样本,剩余的720个作为测试样本。
2.3LS-SVM估算
样本构建完成后,利用LS-SVM算法进行回归训练进而得到估算模型。核函数参数和正则化参数很大程度上决定了估算模型的学习能力和泛化能力,为使模型具有较好的估算效果,有必要对这两个参数进行优化调整。这里采用RBF核函数。结合样本,通过两层网格搜素策略确定可能的参数组合,通过交叉验证法选出最优参数值[13]。X轴各分量估算结果叠加后得到Y轴各分量估算结果叠加后得到通过求的平方和再开方,得到船面风速的估算值;通过对求反正切,然后结合两者的正负确定估算值的象限分布,得到船面风向的估算值。船面风速、风向估算曲线分别如图3~图4所示。
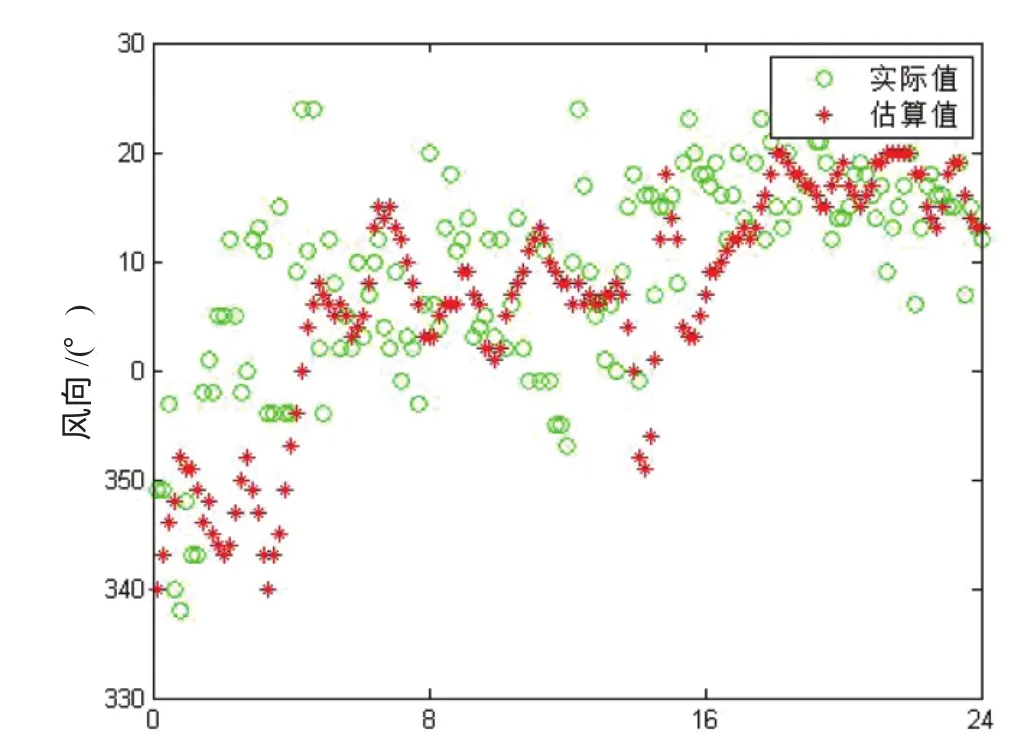
图4 锚泊状态下船面风向估算结果
2.4误差分析
评价估算结果时,采用均方根误差来分析,计算公式为:

式中:σMSE为均方根误差;M为估算样本数;y(k)为序列的真实值;yˆ(k)为估算结果。从图3和图4中可以看出,风速、风向的估值曲线与实测曲线在趋势走向和分布上基本一致,但估值变化相对实际略微滞后,且在风速、风向变化的拐点处误差较大。通过计算发现:采用小波变换和LS-SVM相结合的方法进行估算时,风速、风向估算的均方根误差分别为8.6%和12.7%。这表明小波变换和LS-SVM相结合的方法在短时风速、风向估算方面具有较高的准确性。
3 结论
采用基于小波变换和LS-SVM的算法,先将原始风速序列进行正交分解,再分别进行小波分解,然后利用最小二乘支持向量机分别对小波分解得到的低频近似分量和高频细节分量进行估算,最后将两者的估算结果进行叠加得到未来0.5 h的估算风速。实验数据验证表明,该算法对锚泊状态下短时船面风速风向估算具有较强的可行性。这里只是采取历史风速风向数据进行估算,其实影响风速风向的主要因素还有气温、湿度、气压、降水等气象数据,如果把以上因素作为输入变量加入模型训练,将有助于进一步改善估算精度。
[1]赵素平.LNG船舶锚泊安全研究[D].武汉:武汉理工大学,2013.
[2]范高峰,王伟胜,刘纯,等.基于人工神经网络的风电功率预测[J].中国电机工程学报,2008,28(34):118-123.
[3]王德明,王莉,张广明.基于遗传BP神经网络的短期风速预测模型[J].浙江大学学报:工学版,2012,46(5),837-841,904.
[4]修春波,任晓,李艳晴,等.基于卡尔曼滤波的风速序列短期预测方法[J].电工技术学报,2014,29(2):253-259.
[5]S Sancho,G Emilio,MAngel,et al.Short Term Wind Speed Prediction Based on Evolutionary Support Vector Regression Algorithms[J].Expert Systems with Applications,2011,38(4):4052-4057,2011.
[6]栗然,陈倩,徐宏锐.考虑相关因素的最小二乘支持向量机风速预测方法[J].电力系统保护与控制,2010,38(21):146-151.
[7]汪晓东,张长江,张浩然,等.传感器动态建模的最小二乘支持向量机方法[J].仪器仪表学报,2006,27(7):730-733.
[8]周松林,茆美琴,苏建徽.基于小波分析与支持向量机的风速预测[J].太阳能学报,2012,33(3):452-456.
[9]Suykens J A K.Nonlinear Modeling and Support Vector Machines[C]//IEEE Instrumentation and Measurement Technology Conference,Budapest,Hungary,2001.
[10]黄永红,宋心雷.基于贝叶LS-SVM的海洋生物酶发酵过程软测量建模[J].仪表技术与传感器,2014(8):92-94.
[11]王晓兰,王明伟.基于小波分解和最小二乘支持向量机的短期风速预测[J].电网技术,2010,34(1):179-184.
[12]韩晓娟,曹慧,李勇,等.基于小波变换和LS-SVM的短期风速预测方法[J].太阳能学报,2011,32(10):1538-1542.
[13]郭辉,刘贺平,王玲.最小二乘支持向量机参数选择方法及其应用研究[J].系统仿真学报,2006,18(7):2033-2036,2051.
Study on the Estimation Method for Wind Speed and Direction on Ship Surface Based on Wavelet Transform and Least Squares Support Vector Machine(LS-SVM)
GUO Yan-ping,HU Tong,QI Sui-ping
Shandong Provincial Key Laboratory of Ocean Environment Monitoring Technology,Institute of Oceanographic Instrumentation,Shandong Academy of Sciences,Qingdao 266001,Shandong Province,China
In order to estimate the wind speed and direction on ship surface in the next half hour under the anchoring condition,an estimation method is proposed in this paper based on wavelet transform and least squares support vector machine.Firstly,the X-axis and Y-axis wind speeds are obtained by orthogonal decomposition from the original wind data series.Then the low and high frequency data series are extracted by wavelet decomposition.Secondly,based on the theory of least squares support vector machines,the prediction is made for the low and high frequency series,and the wind estimation values of X-axis and Y-axis are obtained respectively by the superposition of the predicted results of all series.Finally,the estimation values of wind speed and direction in the next half hour are obtained simultaneously by using the vector algorithm.The proposed method is evaluated with the wind data measured by the ship-borne meteorological instrument on the anchoring ship in the East China Sea.The results show that this method has high estimation precision.
wavelet transform;least squares support vector machine;short-term wind speed and direction;estimation method;anchoring condition
TP273
A
1003-2029(2016)02-0066-05
10.3969/j.issn.1003-2029.2016.02.012
2015-12-04
山东省自主创新及成果转化专项资助项目(2014CGZH1203)
郭颜萍(1978-),硕士,高级工程师,研究方向为海洋仪器仪表及船舶气象技术。E-mail:lantian3999@163.com