深海水下滑翔器浮力驱动系统设计
2016-10-25孙秀军王延辉
杨 燕,孙秀军,王延辉
(1.天津城建大学,天津 300384;2.国家海洋技术中心,天津 300112;3.天津大学,天津 300072)
深海水下滑翔器浮力驱动系统设计
杨燕1,孙秀军2,王延辉3
(1.天津城建大学,天津300384;2.国家海洋技术中心,天津300112;3.天津大学,天津300072)
以微型轴向柱塞泵为核心的高压浮力驱动系统是1 000 m以深水下滑翔器和剖面浮标优先采用的重要动力单元。文中首先介绍了当前国际上水下滑翔器和剖面浮标两型剖面运动平台的浮力驱动系统的种类及应用,然后以1 000 m以深水下滑翔器为例,系统地阐述了其高压浮力驱动系统的工作原理和设计方法,以及绝对排油量测量、吸油口气锁防止和柱塞偶件精密配合等核心问题。设计制作出精密、高效而且可靠的高压浮力驱动系统,可以为我国剖面观测平台的进一步发展起到推进作用。
水下滑翔器;剖面浮标;微型轴向柱塞泵;高压浮力驱动系统
微型高压浮力驱动系统是制约国产深海剖面运动平台发展的瓶颈,研究以微型轴向柱塞泵为核心的高压浮力驱动系统,以保证其可靠地应用于大深度水下滑翔器样机,可以为国产剖面运动平台的进一步发展奠定基础。典型深海剖面运动平台主要涉及水下滑翔器以及Argo计划采用的自持式剖面浮标,其采用浮力驱动系统来实现在海洋表层和1 000~2 000 m左右深度的剖面运动,同时可以记录海洋水柱的科学数据,因而成为海洋学家的重要的测量工具。
在工程和科学技术迅速发展的今天,我国正在摒弃附加值低、利润微薄的低端制造,开始专注于微型精密的高附加值设计,而以微型轴向柱塞泵为核心的高压浮力驱动系统就是一个典型的例子。在海洋仪器的设计与制造方面,研究以微型轴向柱塞泵为核心的高压浮力驱动系统意义重大。首先,研究深海浮力驱动系统,可以突破国际社会对我国的技术封锁;其次,深海浮力驱动系统的研究能够推进深海剖面运动平台在我国的发展。
1 剖面运动平台浮力驱动单元的应用
1.1浮力驱动单元在水下滑翔器中的应用
美国研制的典型水下滑翔器因为其设计任务不同,采用不同的浮力驱动系统。Washington大学研制的Seaglider和Scripps研究所研制的Spray均为1 000 m以深高压作业水下滑翔器,两者皆采用以微型轴向柱塞泵为核心的高压浮力驱动系统[1-2]。Slocum Thermal水下滑翔器往返于海水表面和1 200 m深度之间,采用温差热机作为浮力驱动系统[3]。Slocum Electric 200水下滑翔器采用滚动膜片式柱塞泵系统,该柱塞泵系统的柱塞缸直径较大,长度较短,可以完成大排量,大流量的泵油任务,却不能实现2 MPa以上高压作业。Slocum Electric 1000水下滑翔器同Spray和Seaglider相同,采用以微型轴向柱塞泵为核心的浮力驱动系统[4-5]。这样以来,以微型轴向柱塞泵为核心的高压浮力驱动系统的采用,保证了Slocum滑翔器(1 000 m),Spray滑翔器和Seaglider滑翔器三者均可以实现大深度,大排量的泵油作业。
2006年,Washington University应用物理实验室研制了一种更大潜深的滑翔器Deepglider,它的设计目标为6 000 m[6]。新西兰的Otago大学电子研究实验室正在研制水下滑翔器UnderDOG,其设计工作深度为水下5 000 m。Deepglider和UnderDOG两种超大深度水下滑翔器同样采用以微型轴向柱塞泵为核心的高压浮力驱动系统[7-8],可见该类高压浮力驱动系统在大深度水下滑翔器的研发中的重要地位。
1.2浮力驱动单元在剖面浮标中的应用
20世纪 80年代末,Scripps海洋研究所和Webb实验室的海洋学家合作,成功地研制了ALACE浮标系统;随后又成功研制了PLACE、APEX浮标。这三款浮标最终发展成为Argo这样全球性的海洋浮标观测系统[9-10]。ARGO浮标是指用于建立全球海洋观测网的一种专用测量设备。然而随着技术的进步,直到目前,Argo计划逐渐开始采用以下三种剖面浮标模型,它们分别是法国MARTEC(现在是NKE Instrument)与IFREMER合作研发的剖面浮标PROVOR,美国Webb Research公司生产的APEX剖面浮标和Scripps海洋研究所研制的SOLO剖面浮标[11-13]。
美国Webb Research公司研制的APEX剖面浮标,装有体积细长的单冲程柱塞泵系统。Scripps海洋研究所与WHOI研究所制造的SOLO剖面浮标与APEX相同,均配置单冲程柱塞泵系统。
法国研制的ROVOR浮标具有较大体积的泵油能力,可以实现浮力自调节以适应不同密度海域下的监测作业,从而免去布放前繁琐的预配平操作。PROVOR浮标配置的以微型轴向柱塞泵为核心的高压浮力驱动系统,该泵系统集成安装在浮标底盘上,结构紧凑,可靠性高。由于安装了功能强劲的心脏—以微型轴向柱塞泵为核心的高压浮力驱动系统,PROVOR浮标具有较大的负载能力,可以通过搭载Argo计划外的科学传感器,实现浮标的拓展应用。PROVOR每10 d浮出一次水面,记录和回传数据。
2 深海水下滑翔器浮力驱动系统设计
2.1深海水下滑翔器的结构组成
图1所示为天津大学设计的某型深海水下滑翔器,其机体由头部罩、前舱、负载舱、后舱和尾锥组成[14]。大升阻比飞行翼对称安装在鱼雷型机体两侧,并可在与主舱固定连接的机翼固定槽内前后调整位置。机体内部由前到后依次设置有浮力驱动系统、俯仰调节系统、横滚调节系统、射流推进系统等。该型深海水下滑翔器的液压泵系统位于平台的前端,这样可以减小起俯仰姿态调节作用的电池包的位移,从而降低能耗。

图1 深海水下滑翔器的内部结构
2.2浮力驱动系统油路基本框架
根据深海水下滑翔器的工作原理及设计经验,液压泵系统的液压回路可以简单描述成图2所示的基本框架。出油回路:电机带动微型轴向柱塞泵工作,将风箱式蓄油池中的航空液压油泵出到外皮囊中,同时在微型轴向柱塞泵之前设置过滤器,在微型轴向柱塞泵之后设置单向阀,以免航空液压油从外皮囊回流至风箱式蓄油池中;回油回路:电池阀打开,外皮囊中的航空液压油在外界大气压和壳体内部的负压共同作用之下由外皮囊流回到风箱式蓄油池当中。

图2 以微型轴向柱塞泵为核心的高压浮力驱动系统工作流程
针对以上所述的液压回路基本框架,存在两个需要解决的问题:(1)微型轴向柱塞泵的吸油能力不足。即微型轴向柱塞泵将置于负压(1/3~1/2真空)环境下的风箱式蓄油池中的航空液压油泵出到外皮囊中时,在微型轴向柱塞泵的进油端容易离析出微小真空气泡,进而造成气锁现象的发生,难以将液压油泵出到外皮囊中;(2)准确测量外皮囊中的液压油的体积。微型轴向柱塞泵将蓄油池中的航空液压油泵出到外皮囊中,外皮囊中的液压油的体积是控制和测试水下滑翔器的重要参数,该参数决定了水下滑翔器的航行速度和俯仰姿态角的大小,如何准确可靠地取得该数据就是非常重要的问题。
2.3液压油路系统基本部件选型及试验
浮力驱动系统采用不锈钢高压油管连接。如图3(右)所示,大扭矩电机通过微型联轴器直接与高压微型轴向柱塞泵的输入轴结合,这样可以减少减速机机构,大大节省了空间和减小了质量。同时电磁阀、过滤器和单向阀也采用精密器件,保证系统的工作可靠性和整体结构的紧凑。如图3(左)所示为与深海水下滑翔器完美集成的最终设计装配模型,该模型深海水下滑翔器提供浮力驱动动力。

图3 以微型轴向柱塞泵为核心的浮力驱动系统装配模块
3 高压浮力驱动系统的关键技术
3.1微型轴向柱塞泵设计
Teledyne Webb Research公司和Rutgers大学COOL实验室的Slocum Electric 1 000 m水下滑翔器均采用先进的微型轴向柱塞泵作为高压浮力驱动系统的核心部件。鉴于上述研究机构的成熟经验,本课题组打算通过国外采购和自行设计相结合的方式来研制以微型轴向柱塞泵为核心的浮力驱动系统。就微型轴向柱塞泵而言,可通过学习国外先进的微型轴向柱塞泵设计方法,与国内专业设计生产单位合作设计加工微型轴向柱塞泵。
按照当前流行微型轴向柱塞定量泵的设计指标,一般要求泵工作压力在20 MPa以上,每转排量为0.04~0.10 mL/rev,工作转速在4 000~5 000 r/min。由于设计的水下滑翔器工作深度要达到1 000 m,故扭矩的选取参照1 200 m深时所承受的压力,再考虑到大气压的影响,该水泵所承受的压力达到121 bar。按照Slocum Electric 1 000 m工作液体的体积改变量为0.55 L计算得出泵的工作时间。
如图4所示,微型轴向柱塞泵的工作原理并不复杂,它是利用与传动轴平行的柱塞在柱塞孔内往复运动所产生的容积变化进行工作的。由于柱塞与柱塞孔都是圆柱形零件,加工时可以达到很高的配合精度,故而容积效率高,运转平稳,流量均匀性高,噪音低,工作压力高。柱塞泵的泵油机构包括两套精密偶件:柱塞与柱塞套构成的柱塞偶件以及出油阀与出油阀座构成的出油偶件。

图4 微型轴向柱塞泵结构原理(摘自网络[15])
柱塞与柱塞套是一对精密偶件,经配对研磨后不可以互换,要求有较高的加工精度和表面光洁度以及极好的耐磨性,其径向间隙为0.002~0.003 mm。柱塞头部圆柱面上加工有斜槽,并通过径向孔、轴向孔与顶部相连通,其目的是改变循环供油量;柱塞套上设计有进、回油孔,均与泵上体内低压油腔相通,柱塞套装入泵上体后,应用定位螺钉定位。柱塞头部斜槽的位置不同,改变供油量的方法也不同。
出油阀和出油阀座也是一对精密偶件,配对研磨后不能互换,其配合间隙为0.01 mm。出油阀是一个单向阀,在弹簧压力作用下,阀上部圆锥面与阀座严密配合,其作用是在停止供油时,将高压油管与柱塞上端空腔隔绝,防止高压油管内的油倒流入喷油泵内。出油阀的下部呈十字断面,既能导向,又能通过柴油。出油阀的锥面下有一个小的圆柱面,成为减压环带,其作用是在供油终了时,使高压油管内的油压迅速下降,避免喷孔处产生滴油现象。当环带落入阀座内时,则使上方容积很快增大,压力迅速减小,迅速停喷。柱塞往复运动总行程是不变的,由凸轮的升程决定。柱塞每个循环的供油量大小取决于供油行程。供油行程不受凸轮的限制是可变的。供油开始时刻不随供油行程的变化而变化。转动柱塞可改变供油终了时刻,从而改变供油量。
3.2外皮囊液压油体积测量系统设计
就如何实现外皮囊的液压油体积测量的问题,一般有两种方案:(1)增量式体积测量。即在风箱式蓄油池的出油端增加微型涡轮流量计,然而流量计是一种增量式计量工具,排油和回油次数多了,会出现排油总量的积累误差,难以保证正确的排油量测量;(2)绝对式体积测量。由于液压管路充满体积固定的液压油,外皮囊的液压油体积与蓄油池内液压油体积总量固定,所以知道蓄油池内液压油体积便可以知道外皮囊内液压油的体积,同时蓄油池设计成风箱形状,可以通过测量其长度来确定其内部液压油体积。这里可以通过非接触式直线位移传感器和接触式直线位移传感器来测量蓄油池的长度。蓄油池的设计如图5所示为风箱式设计,可以简单实现长度测量,进而完成外皮囊液压油体积的准确估算。

图5 风箱式蓄油池结构设计与外观
3.3轴向柱塞泵气锁现象分析与避免
为避免气锁现象发生,我们对水下滑翔器浮力驱动系统基本框架做以下修改,即在微型轴向柱塞泵前端增加初级增压泵系统,保证高压微型轴向柱塞泵正常工作。初级增压泵具有良好的吸油能力,可以弥补微型轴向柱塞泵的吸油能力不足的问题。然而由于初级增压泵的泵油流量大于微型轴向柱塞泵的泵油流量,所以在初级增压泵与微型轴向柱塞泵之间添加具有固定开启压力的单向阀,既确保初级增压泵不会超负荷工作,也确保微型轴向柱塞泵有稳定的进油口压力。根据微型轴向柱塞泵的工作要求,设置固定开启压力单向阀的开启压力为0.1~0.2 MPa。该种改造方案需要增加一个初级增压泵,一个单向阀,一个电机,一个联轴器等,整个结构的质量和体积将增加许多(如图6)。
如图6所示,浮动系统由两个液压油路组成,分别对应了排油和回油过程:(1)排油时,液压油在初级增压泵的作用下,经过过滤器到达主泵的进油口,保证主泵的液压油的供给。主泵是定量泵PB32.5,该泵在进油口为负压的情况下,容易因气泡而产生自锁。初级增压泵的排量大于定量泵排量,所以在主泵进油口处设置溢流阀,将部分过剩的液压油返回到蓄油池当中。盘式电机带动主泵将液压油经由单向阀打到外皮囊中。该过程中,电磁阀是关闭的。(2)回油时,主泵和初级增压泵均停止工作,电池阀打开,外皮囊中的液压油在大气压强,表层海水压力和蓄油池内部的负压的作用下,经由电磁阀流回蓄油池。
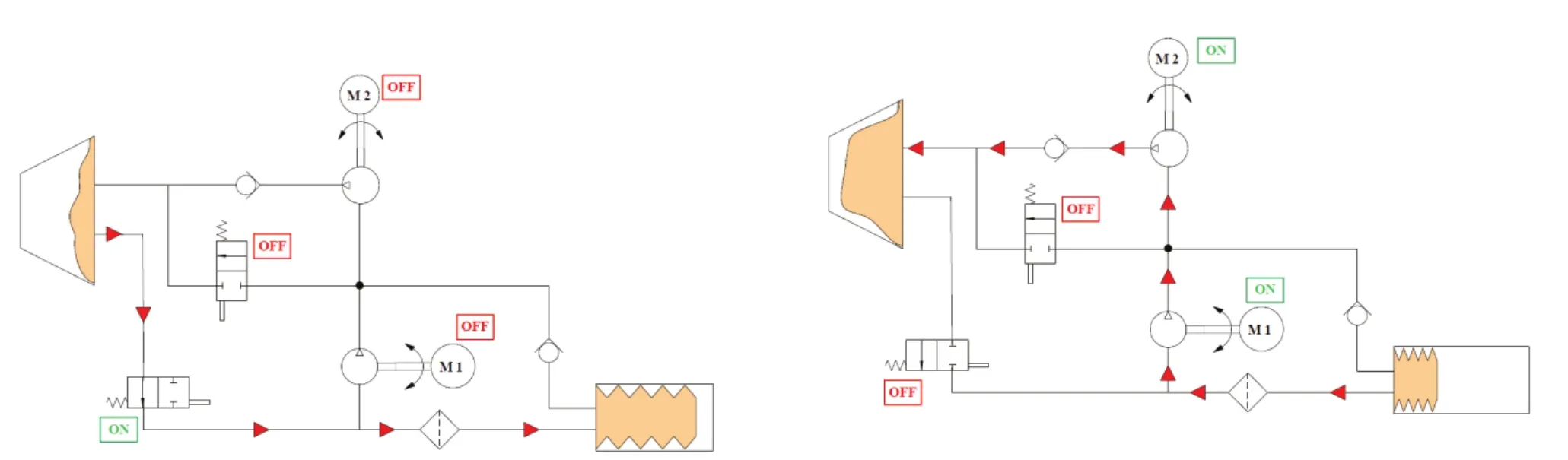
图6 以微型轴向柱塞泵为核心的高压浮力驱动系统增加初级增压泵后的工作流程
避免气锁的另外一种方案是在浮力驱动系统的基本框架的风箱式蓄油池处增加真空泵系统,即利用真空泵将壳体内部的部分空气打到封闭的风箱式蓄油池外面,压迫蓄油池收缩,从而将蓄油池中的液压油驱赶到微型轴向柱塞泵的前端。真空泵可以打出大约0.1~0.2 MPa,有能力替代初级增压泵来解决气锁问题。真空泵系统是水下滑翔器的必备部件,所以不会增加许多机构,只是增加了单个气动阀。
4 总结
综上所述,以微型轴向柱塞泵为核心的高压浮力驱动系统具有结构紧凑、动力强劲、易于实现大排量等优点。美国的多种大深度水下滑翔器及法国的PROVOR剖面浮标均采用该系统作为动力源,从而提高了水下滑翔器和剖面浮标的负载能力,提高了水下滑翔器和剖面浮标的运动速度,进而实现了水下滑翔器的拓展应用,实现了自适应中性浮力调节,免去了繁琐的配平操作,补偿了水下滑翔器和剖面浮标因为生物腐蚀造成的浮力损失,延长了水下观测时间。
本文以天津大学某型深海水下滑翔器的设计为例,详细讲解了以微型轴向柱塞泵为核心的高压浮力驱动系统的设计原理,以及其设计过程的注意事项,并针对其设计过程中的防止气锁、测量排油量和设计微型轴向柱塞泵等关键技术问题列写了解决方案。
[1]Yuh J.Design and control ofautonomous underwater robots:a survey[J].Autonomous Robots,2000,8(1):7-24.
[2]Eriksen C,Osse,T,Light R,et al.Seaglider:a long-range autonomous underwater vehicle for oceanographic research[J].Ocean Engineering,2001,26(4):424-436.
[3]Webb D,Simonetti P,Jones C.SLOCUM:an underwater glider propelled byenvironmental energy[J].Ocean Eng,2001,26(4):447-452.[4]ManleyJ,Weirich J.Deep frontiers:technologyfor ocean exploration[J].Sea Technology,2005,46(4):10-15.
[5]Eriksen C,Osse T,Light R,et al.Seaglider:a long-range autonomous underwater vehicle for oceanographic research[J].IEEE Journal ofOceanic Engineering,2001,126(4):424-436.
[6]Yu J,Zhang A,Jin W,et al.Development and experiments of the sea-wing underwater glider[J].China Ocean Eng.,2011,25(4): 721-736.
[7]Townsend N,Shenoi R.Feasibility study of a new energy scavenging system for an autonomous underwater vehicle[J].Autonomous Robots,2015:1-13.
[8]Tian B,Yu J,Zhang A.Dynamic modeling ofwave driven unmanned surface vehicle in longitudinal profile based on D-H approach[J].Journal ofCentral South University,2015,22(12):4578-4584.
[9]余立中,商红梅,张少永.Argo浮标技术研究初探[J].海洋技术,2001(8):35-38.
[10]余立中.我国的海洋剖面探测浮标—COPEX[J].海洋技术,2003(5):15-18.
[11]Eriksen C.Autonomous underwater gliders,autonomous and lagrangian platforms and sensors(ALPS)workshop,Sea Lodge,La Jolla CA,2003.
[12]朱光文.我国海洋监测技术研究和开发的现状和未来发展[J].海洋技术,2002,21(2):27-32.
[13]武建国.混合驱动水下滑翔器系统设计与性能研究[D].天津:天津大学,2009.
[14]孙秀军.混合驱动水下滑翔器动力学建模及运动控制研究[D].天津:天津大学,2011.
[15]http://www.globalspec.com/ImageRepository/LearnMore/dp2.gif
Design of a Buoyancy Engine for Deep Sea Gliders
YANG Yan1,SUN Xiu-jun2,WANG Yan-hui3
1.Tianjin Chengjian University,Tianjin 300384,China;
2.National Ocean Technology Center,Tianjin 300112,China;
3.Tianjin University,Tianjin 300072,China
The high-pressure buoyancy engine with the micro axial piston pump as its core functions as a key driving system for underwater gliders and profiling floats operating in a depth of over 1 000 m.This paper firstly introduces the prototypes of the buoyancy driving systems applied in the profiling platforms and their applications,before taking the 1 000-m rated underwater glider for instance to systematically illustrate the working principles and design approaches of its high-pressure buoyancy engine,as well as the critical technologies such as measuring pumping oil volume,avoiding pump inlet air lock and keeping pump piston clearance fit.The design and fabrication of a high-precision,high-efficiency and reliable buoyancy engine can greatly press ahead with the development of the profiling platforms for marine monitoring in China.
underwater glider;profiling float;micro axial piston pump;high-pressure buoyancy engine
P715.5
A
1003-2029(2016)02-0009-06
10.3969/j.issn.1003-2029.2016.02.002
2015-07-24
天津市自然科学基金资助项目(11JCYBJC06200);国家高技术研究发展计划(863计划)资助项目(2014AA09A507,2012AA091001)
杨燕(1983-),女,博士,讲师,主要研究方向为海洋环境监测移动平台系统控制理论与技术。
孙秀军(1981-),男,博士,副研究员,主要研究方向为基于移动平台的海洋环境监测技术。E-mail:sunxiujun@yahoo.com